
Abstract
This article aims to reduce the influence of heavy fog on the outdoor imaging equipment and to maximally improve the foggy image resolution. It is known that reflected light of the object includes the abundant target polarization information. The foggy image can be restored by these information of the target and the airlight. Therefore, this article introduces a multi-channel polarization information system and defogging algorithm accordingly. The polarization information system provides a necessary solution for the accurate application of a specific algorithm, since it can ensure the accuracy of acquired image information. The key point of the proposed algorithm lies in accurately estimating the parameters in the polarization defogging model. Based on the normal threshold distribution comparison, it can avoid the highlight portion of the non-sky area in the image and accurately estimate the airlight intensity at infinite distance so as to effectively reduce the color distortion of the bright area. The median filtering algorithm is used to obtain the airlight degree of polarization by using three obtained polarization scenes. At last, this article analyzes the experimental results through defogging evaluation indexes and compared the result obtained by this algorithm with others.
Keywords
Introduction
Haze is the major factor in reducing the effectiveness of visual perception in the outdoor environment. The scattering and absorption of the beam by atmospheric molecules and aerosol molecules causes the reduction of image clarity and contrast, which directly affects the normal operation of the vision system in some areas such as military reconnaissance, civil aviation transport, and port logistics. It costs the country millions of dollars each year. Therefore, improving the quality of outdoor hazy weather scene images is of great strategic significance. At present, there are three main methods for the foggy image processing: 1 the image enhancement technology, the image restoration technology, and the foggy polarization image-sharpening technology.
Kim et al. 2 proposed a method of image enhancement based on stereo imaging. According to the color line theory, the sharp image was obtained. Although the image enhancement technology is simple and has a wide range of applications, the enhancement effects of haze images captured under different conditions vary greatly. 3 But this method often has limited the ability to restore target details and colors. A quantitative measurement 4 has been presented to evaluate the haze density, in which the characteristics of hazy images on brightness, texture, and color are taken into account.
He et al. 5 selected a single haze image, combining the atmospheric physical scattering model and analyzing thousands of images which summarized the prior knowledge of dark channel. Due to the limitations of the guided filtering algorithm, the halo appears on the edge of the image object. In view of the shortcomings of the above literature, Wang et al. 6 proposed an improved algorithm based on morphology. This method not only kept the edges of images but also improved the processing speed of the algorithm. Xie et al. 7 proposed a single-image dehazing algorithm based on wavelet decomposition and fast kernel regression model. The processed image is even more smooth and continuous in the regions of sudden change in depth. Qu et al. 8 proposed a new defogging method based on the locally consistent Markov Random Field (MRF) framework. This approach strengthened the restriction of the overall image while incorporating more sophisticated statistical a priori, which effectively solved the problem of inadequate restoration of detail.
The above defogging algorithm belongs to the image-restoration technology. Although defogging effect can be obtained, the limitation is great. Most of the prior knowledge or preconditions involved in image-restoration technology have certain limitations, which limits the application of the technology. Besides, the algorithm is complicated and time-consuming.
Compared with the image-restoration technology, the foggy polarization image sharpening has a wide range of applications. In this way, there is no need to obtain more prior information and also reduce the tedious degree of the experiment. Schechner et al. 9 and Yoav et al. 10 used the polarization characteristics of light for image restoration, though more prior information does not need to be obtained, which needs to adjust the polarization direction of the polarizer. In addition, it is far from the real-time requirement of the project. The required parameters can derived automatically from measurements of pixels that correspond to the sky by the horizon. 11 However, the parameter estimator relies on the existence of sky in the field of view. Chen and Xu 12 proposed a fog-removal algorithm based on the polarization principle of dark channel and guided filtering. However, there is no uniform filter radius for all images. A color-constant transformation algorithm was proposed by Zhang et al. 13 to convert the polarization information into corresponding components in the hue, intensity, and saturation (HIS) color space such as brightness, chroma, and saturation. The experimental results show that this method can significantly improve the image contrast in hazy weather. However, enhancement effect about scene details is not ideal in the misty state. The region detection and closing algorithm were proposed by Wang et al. 14 to separate the sky region. It effectively improved the estimation accuracy of scene depth information and atmosphere information. Experimental results show that the algorithm effectively improves the contrast and sharpness of images. Although polarization image-sharpening technology is not mature yet, its advantages give us a blueprint for future development. For example, it is suitable for various haze weather, festival fidelity, fast processing, and low cost.
In view of the great advantages demonstrated by polarization image-sharpening technology and the immaturity of this technology, this article proposed a defogging algorithm based on the atmospheric scattering model. 15 Compared with Schechner et al. 9 and Yoav et al., 10 there is no human–computer interaction, which improves effectively the processing efficiency. Compared with Namer and Schechner, 11 the proposed algorithm does not depend on the existence of sky regions, so it has a wider application. To a certain extent, the processing effect 12 depends on the filter radius, and there is no uniform filter radius for all images. Therefore, the proposed algorithm in this article shows stronger robustness. The algorithm proposed by Zhang et al. 13 is limited to the processing of dense fog images. The removal effect under mist fog is not ideal. In this article, the multi-channel polarization information system is used to acquire synchronously the haze images with different polarization directions. First, these images are used to obtain the target polarization information in real time. The degree of polarization is calculated by Stokes vector detection principle. Second, the method based on normal distribution threshold comparison can avoid the highlight area of the non-sky area in the image. It can estimate accurately the airlight intensity at an infinite distance and effectively reduce the color distortion of the bright area. Finally, three atmospheric light polarization images were obtained by using the median filtering method 16 for the acquired three polarized images. The degree of polarization of airlight is obtained in the same way as calculating the degree of polarization.
Content arrangement
In view of the fundamental task of clearing the image of foggy weather, this article mainly solves three key problems: the realization of polarization defogging algorithm, the construction of multi-channel polarization information system and the analysis of experimental results. The polarization defogging model built on the atmospheric scattering model contains unknown parameters. The key of the proposed algorithm is to estimate the above parameters separately, so as to inverse the model and obtain a clear image. The construction of the multi-channel polarization information system provides an image source for the defogging model, which provides accurate polarization information for subsequent algorithm. As for the analysis of experimental results, three evaluation indicators are used to compare the adaptive histogram equalization (AHE) algorithm, the dark channel prior technique, 5 and the conventional polarimetric imaging technique 10 with the proposed algorithm. The images before and after defogging are evaluated by three evaluation indexes: information entropy, average gradient, and gray variance. This article analyzes the defogging effect of different algorithms from two aspects: visual effects and calculated data. This section sorts out the main work of this article. Foggy image–sharpening flow chart is shown in Figure 1.

Foggy image–sharpening flow chart.
Polarization defogging algorithm
In this chapter, the principle of defogging algorithm is elaborated from three aspects: atmospheric scattering model, polarization defogging model, and estimation of polarization parameters.
Atmospheric scattering model
The radiated light of the target is scattered and absorbed by various suspended particles and aerosols in the atmosphere. This is the main reason of the degradation of image quality. Xia et al. 17 believe that the following two kinds of transmission is the main cause of the decline of image quality. One is that the imaging is reflected by the target surface and being scattered and absorbed by suspended particles in the air, and then followed by the imaging system; the other is that source light is reflected by the suspended particles and then becomes the airlight, and received by the imaging system. Atmospheric scattering models are widely used to describe foggy image features, as given in equation (1)

where I is the image received by the imaging system. A is the total radiance due to airlight.
Polarization defogging model
The idea of the haze image sharpening is to retrieve the unknown polarization parameters of the polarization imaging defogging model. The model is mainly based on the atmospheric scattering model. 15 The polarization elements are incorporated into the model to complete the construction of polarization imaging defogging model.
The polarization information of light is generally described by the Stokes vector (I, Q, U, V), where I represents the total light intensity; Q represents the intensity difference between line polarized light at 0°and 90°; U represents the intensity difference between line polarized light at 45°and 135°; V represents the intensity of circularly polarized light, because it is difficult to get in nature, so V = 0 is used for this article.
The degree of polarization can be obtained by three polarizing images with different polarization directions. The intensity of light in any polarization direction by Qu et al. 8

where

Assuming that the light source of any scattering particles keeps in the same direction at any time, the area of the light source, the scattering particles and the imaging system are defined as the incident plane. The airlight can be decomposed into

The light received by the imaging device after being reflected by the target object is almost not polarized, and its energy becomes halved after passing through the linear polarizer.
The total airlight intensity is

According to the aforementioned equations, polarization imaging defogging model can be simplified as

Estimation of polarization parameters
The idea of image sharpening is to get clear images. The key problem is to solve the unknown parameters in the model. This section describes the issue.
Estimation of the degree of polarization
It is known from experience that the accurate estimation of the degree of polarization has a great influence on the image sharpness processing. Therefore, accurate acquisition of the polarization degree is the prerequisite for the normal experiment. The imaging system used a three-jaw chuck to drive the polarizer lens to move synchronously and radially to acquire haze images. For the convenience of calculation, the polarization angle of the polarizer is adjusted experimentally to 0°, 60°, and 120° with respect to the reference direction to obtain three-dimensional polarization images. From equation (2), it is obtained that



The degree of polarization can be obtained by equation (3).
Estimation of airlight intensity at an infinite distance
To estimate the true value of airlight, He et al. 5 advocated replacing the value of airlight intensity with the average value of selected pixels. First, they find 0.1% of the total number of pixels in the dark channel map based on the dark channel prior theory. Second, the pixels found in the original image are found one by one in the original image. Finally, the pixels are located. The domain is A, and the number of pixels is N. In order to reduce the impact of improper values on subsequent algorithms, the algorithm uses the average value of regional pixels

The image threshold segmentation
18
is used to obtain the region of
The estimated figure of
The estimation of airlight degree of polarization
Preprocessing the three polarized images, the algorithm is as follows, 14 so that the atmospheric scattered light is V(x), and the following conditions are met

The single-channel image is formed by the minimum of the original image red, green, and blue (RGB) three channels, that is, the grayscale image to be processed here. The filtering process is as follows



After the test, the parameter
The calculation formula for the Stokes vector

The airlight degree of polarization is

Construction of the multi-channel polarization information system
Currently, the main acquisition method of polarization information is the single-channel distribution mode. In this way, the information acquisition efficiency is lower, and the image stabilization function has not been setup, which caused a low coincidence degree of pixels and information distortion. In view of the above problems, the imaging equipment described in this article adopts the coordinated compensation flexible coordination control system. The high-definition (HD) lens can be adjusted by synchronous adjusting mechanism to obtain different image information, which also reduces the follow-up difficulty of the camera calibration and registration, which provides a necessary solution for the precise application of the specific algorithms.
Construction of camera hardware system
The HD camera module acquires the image information from different angles of polarized glasses. The image information is transmitted through data line for the image processing. The data cable is connected to the HD camera module. The HD camera module adopts the synchronization adjustment mechanism to perform radial adjustment synchronously, obtain different image information, and transmit the data to the computer terminal through the data connection device. The work flow is shown in Figure 3.

HD camera module work flow.
The physical map is shown in Figure 4. The four HD camera modules are connected to the synchronous adjustment jaws, which keep the four modules stable and improve the rigidity and reliability of the system (image acquired by one of the four modules has no polarization information). At the same time, it adjusts the angle of image capture to align it in the same area, which reduces the discrepancy between the three camera alignment areas by camera calibration and image registration. HD camera module can be connected to the computer terminal through the data line, which provides data information for the defogging processing.

Multi-channel polarization information system.
The multi-channel polarization information system in Figure 4 selects the material in Table 1 as the hardware parts of the imaging detection mechanism. The camera selected is an industrial-grade charge-coupled device (CCD) camera (SVCam-HR), whose resolution is 1292 × 1040. The choosen lens is the Japanese VST industrial lens (VS-0618H1) in this article, which possesses a focal length of 6 mm, and the type of selection of polarizer is two color types. The specific model is shown in Table 1.
The key parameters of detection system devices.

Host computer programming
The host computer is responsible for the client’s functions on the PC, requesting data from the camera and displaying the saved image. The host computer program is written based on Python’s tkinter graphical user interface development library. It has the function of connecting to camera, sending start acquisition request, and displaying captured image. The interface is shown in Figure 5.

Tkinter-based user interface.
The connect and disconnect buttons in the interface send requests for connection requests and disconnections to the camera, respectively. The Start button represents the start of image acquisition, and the Stop button represents the stop of image acquisition and the capture of the captured image. The display window at the bottom of the interface displays the three original polarized images captured and the calculated polarization degree map (because it takes a long time to resolve the polarization information inside the camera, the way to return the image after offline processing is used). The host computer program responds to the user’s behavior in the form of a callback function, including clicking a button with a mouse, closing the window, and the like. When the user clicks the response button, the program will jump to the corresponding callback function to perform the corresponding operation.
Error analysis and correction
Although the three-channel imaging method shows some advantages in real-time acquisition and reliability due to the differences in design of detection channel and installation of component, even in the same environment, there are also subtle changes in an intensity shift and position dislocation of the image, which leads to the deviation of the acquired polarization information. Aiming at the problems faced by the three-channel imaging method, it is necessary to register the obtained polarizing image accordingly. Image registration is a technique to align the different images taken from the same scene, that is, to find the mapping of point to point between the images. 19 According to the difference of image information used in image registration, the image registration methods can be divided into three main categories: gray information method, transpositions domain method, and feature-based method. 20 Of those three categories, the gray information method can also be divided into sequence similarity detection method, cross-correlation method, and interactive information method. In order to verify the registration accuracy of the above algorithm, the image pixel displacements were manually adjusted. The images were registered respectively according to the above algorithm. The results of the eight sets of test are shown in Table 2 as the average error.
Registration algorithm error comparison.

It can be seen from the data in the above table that the interaction information method shows a lower error, so the interactive information method is used to do image registration in this article.
The analysis of experiment results
In this chapter, the process of polarization defogging algorithm is described in detail and compared with different defogging algorithms. Then the dehazing effects of different defogging algorithms are compared.
In order to verify the feasibility of defogging algorithm, multi-channel polarization information system was used to obtain the polarization image information at 0°, 60°, and 120° in real time. These images are showed correspondingly in Figure 6. The synthesized total image, the dark channel map, and the degree of polarization map are also shown in Figure 6.

Three polarized images with different polarization angles: the synthesized total map, the dark channel map, and the degree of polarization map: (a) 0° polarized original image; (b) 60° polarized original image; (c) 120° polarized original image; (d) the synthesized total image; (e) the dark channel map; and (f) the degree of polarization map.
The contrast pictures processed by the proposed algorithm are showed in Figure 7.

The comparison chart based on the polarization defogging algorithm: (a) comparison picture of the target image and (b) comparison chart of the gray histogram.
As you can see from Figure 7(b), the distribution of pixel values of the whole image is more uniform. Because most of the pixels in the picture are on the ground, most of the pixels in the histogram are distributed between 25 and 150, which is more objective. From the target scene before and after processing, we can see that the contrast of the processed image is obviously higher, and the image details are clearer, such as the roofs in the distance. In order to verify the effectiveness of the algorithm, four sets of foggy pictures (including images with sky regions) were selected. Different algorithms were used for defogging recovery. The results are shown in Figure 8.

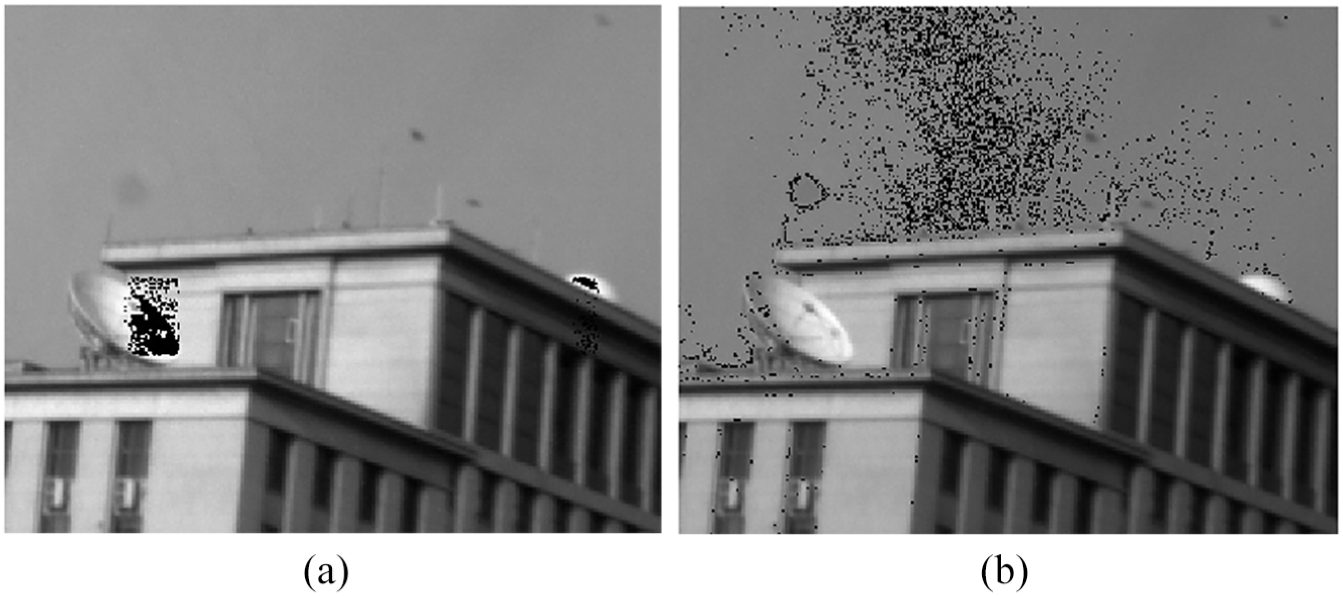
Comparison of defogging effects of different algorithms: (a) Four groups outdoor foggy pictures; (b) the results of the adaptive histogram equalization (AHE); (c) the result of the dark channel prior technique; 5 (d) the results of the conventional polarimetric imaging technique; 10 and (e) the results of the proposed algorithm.
From the processing effect of Figure 8, the four algorithms show a certain clarity effect. The AHE algorithm calculates the local histogram of the image and then redistributes the brightness to change the image contrast. In fact, the algorithm equalizes the histogram of the pixels in a rectangular range around each pixel. Therefore, when processing images with high contrast, the processing effect of the contact part between the scene edge and the sky is very bad, as shown in the second picture in Figure 8(b). The image in Figure 8(c) is processed by the dark channel prior technique
5
based on guided filtering algorithm. It can be seen that the clarity and contrast of the image have been improved obviously, but the processing effect of the algorithm is not ideal in the image with a wide range of sky regions. Especially in the image with low contrast, it will form obvious block effect, such as the fourth image in Figure 8(b). This is because according to the dark channel priori theory, the transmittance required in the sky region will be smaller. The uneven gray level of the sky region will lead to the block effect shown in the image. Although it can be effectively weakened by proper parameter adjustment, it cannot be completely avoided because there is no uniform parameter for all images. The conventional polarimetric imaging technique
10
does not need a priori condition, which reflects the accuracy of the algorithm. After all, the priori condition is established under certain conditions. However, when solving the degree of polarization, the algorithm needs the best polarization state and worst polarization state of the human eye to observe the image, which increases the uncertainty of the experiment to a certain extent. When solving
In order to objectively evaluate the defogging effect of different algorithms in Figure 8, this article quantitatively analyzes the processing quality of images from three aspects: information entropy E, average gradient G, and gray variance D. The information entropy reflects the overall characteristics of the image. The greater the value E, the richer the image information and the better the defogging effect. The average gradient reflects the processing situation of image detail. The greater the value G, the clearer the image. The gray variance reflects the degree of dispersion between gray values. The larger the variance, the more dispersed the gray distribution and the better the visual effect of the image. 21 These three indicators were used to evaluate the images in Figure 5. These three indicators are used to compare the AHE algorithm, the dark channel prior technique, 5 the conventional polarimetric imaging technique 10 and the proposed algorithm. The contrast results are shown in Table 3.
The contrast results of several algorithms.

The contrast analysis in Table 3 shows that the proposed algorithm is superior to the conventional polarimetric technique in each index. From the analysis results of the third group of images, it is found that the gray variance of the proposed algorithm is twice as large as that of traditional polarization imaging technology. In most index analysis, the proposed algorithm is also superior to the dark channel prior fog removal, and it is inevitable that the dark channel prior technology fails in image processing of low contrast areas with a large number of sky regions.
Conclusion
In this article, the goal of clearing the foggy weather image is proposed. The major contribution of this work is threefold: (1) the construction of a multi-channel polarization information system; (2) the implementation of polarization defogging algorithm based on threshold comparison; and (3) image evaluation and analysis after processing with different defogging algorithms. The advantage of this article is that the algorithm based on the normal threshold distribution comparison is proposed, which can avoid the highlight area in the foggy image and accurately estimate the position of
Footnotes
Handling Editor: António Mendes Lopes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Nature Science Foundation of China (grant no.: 51505059), the Liaoning Natural Science Foundation (grant no.: 20180520015) and Dalian supports high-level talent innovation and entrepreneurship projects (grant no.: 2017RQ134).