
Abstract
To avoid anti-phase synchronization for two co-rotating rotors system that occurs so that exciting force generated by the vibrating system is very small, a mechanical model of two co-rotating rotors installed with nonlinear springs is proposed to implement synchronization in a non-resonance system. The dynamic equations of the system are first built up by using Lagrange's equation. Second, an analytical approach, the average method of modified small parameters, is employed to study the synchronization characteristics of the vibrating system, the non-dimensional coupling equations of two motors are deduced, synchronization problem is converted to that of existence and stability of zero solution for the non-dimensional coupling equations of angular velocity. It is indicated that the synchronous torque of two motors coupled with nonlinear springs in synchronous state must be greater than or equal to the difference of their residual torque. Then, in light of the Routh–Hurwitz criterion, the synchronous criterion of the vibrating system is obtained. Obviously, it is demonstrated that the synchronous state and the stability criterion of the system are influenced by the structural parameters of the coupling unit, coupling coefficients and the positional parameters of two rotors, and so on. Especially, there are clearances in between two nonlinear serial springs, which result in synchronization of the vibrating system that lies in an uncertain state. At last, computer simulations in agreement with the numerical results verify the correctness of the theoretical results for solving the steady phase difference between two rotors. It is demonstrated that adjusting the value of the coupling spring stiffness can make phase difference close to zero to meet the requirements of the strongly exciting force in engineering.
Introduction
The synchronization problem is one of the most fascinating nonlinear phenomena, which are widely applied to vibration utilization engineering everywhere in the real world, such as vibrating conveyers, centrifugal machines, vibrating screen and so on. The most representational synchronization is self-synchronization of unbalanced rotors. In 1665, Huygens, a Dutch researcher, was the first one to discover the synchronization of oscillating pendulum, and described on synchronized motion of two pendulum clocks hung on a common support. Even if a pendulum is artificially disturbed, they reinstated the synchronized state after a short time. 1 Since then, the researches of synchronization have drawn the attention of an increasing number of researchers in a variety of real-world systems. In 1960s, Blekhman2,3 proposed the synchronization theory of vibrational mechanics with two or multiple rotors—the method of direct separation of motions is the most prevalent for solving a lot of synchronous problem at that time. Subsequently, many scholars have developed other methods to explore the synchronous behavior of the rotors. Balthazar and colleagues4,5 studied synchronization of two or four non-ideal exciters that are mounted on a flexible structural frame support by means of numerical simulations. Koluda et al.6,7 consider the synchronization of two self-excited double-pendula hanging from the horizontally movable beam and explained how the energy is transferred between the pendula via the oscillating beam using the energy balance. Zhang et al.8–11 employed the average method of modified small parameters to analyze coupling characteristics of two and three exciters supported on a vibrating body in a far-resonant vibrating system. In Zhang et al., 11 synchronization of two exciters rotating in the same was investigated. The results show the phase difference between the two exciters in the steady-state approach to π when the swing of the rigid frame is implemented. However, in order to improve vibration amplitude of the vibrating system in engineering, the phase difference of two co-rotating exciters is expected to operate at zero phase. The smaller the absolute values of phase difference, the greater the exciting force of the system is. Hence, the model of two co-rotating exciters coupled with a spring is proposed to ensure that their phase difference is locked around zero. In recent years, the coupled rotors system is one of the study hotspots in the field of synchronous motion of rotors. Fang and colleagues12,13 have put forward unbalanced rotors coupled with pendulum rod through a torsion spring and analyzed the synchronous characteristics in a far-resonant vibrating system by means of the Poincare method. For the research of 1-degree-of-freedom (DOF) pendulums coupled with a weak spring, speed gradient energy method is adopted to design the controller by Kumon et al.; 14 the dynamic properties of the considering whole system are investigated. In addition, Fradkov and Andrievsky 15 theoretically and numerically explored the phase relations of coupled oscillators by the phase shift between pendulum states on system parameters and initial conditions. Although the above-mentioned researches about synchronization of 1-DOF pendulums coupled with a weak spring have made great progress, the synchronization of two rotors coupled with a spring in a multi-DOF vibration system has been less reported due to the lack of comprehensive understanding about its synchronizing characteristics. In this article, we consider the model consisting of two co-rotating rotors installed with nonlinear springs in a multi-DOF vibration system and the vibrating body is connected to a fixed support by four linear springs. The average method of modified small parameters is employed to study the synchronization characteristics of the vibrating system. It is demonstrated that the value of the spring stiffness, the installed locations of two motors, and the structural parameters of the coupling unit have magnificent influence on the dynamic characteristics of the vibrating system.
The structure of the article is as follow: To begin with, we will give a description of the simplified model of two co-rotating rotors installed with nonlinear springs in a coupling vibratory system and establish dynamic equations by using Lagrange’s equations. In section “Method description,” the complex number method is employed to acquire the steady-state responses in directions of 3 degrees of freedom. In light of the average method with revised small parameter, the synchronous torque of frequency capture of the vibrating system is obtained. In addition, considering Routh–Hurwitz theorem and generalized Lyapunov equation, the synchronous criterion of the vibrating system is established. In section “Numerical results,” the results of numerical analysis in before-resonance system and after-resonance system are presented. To further verify the correctness of the above theoretical derivation and numerical computation, corresponding computer simulations are implemented in section “Computer simulation.” Finally, it is summarized in section “Conclusion.”
Model description and dynamic equations
Figure 1 shows the three-dimensional (3D) model of a vibrating system with two co-rotating rotors installed with nonlinear springs. The system consists of a vibrating body m0 (kg), which is supported on a fixed base by means of four linear springs with stiffness coefficient kj (N/m) and damping coefficient fj (N s/m) in j-directions; two electric motors rotating in the same direction are parallelly installed on the vibrating body via the motor seat, which are connected with the coupling unit consisting of two nonlinear serial springs on which there are clearances d0 (m). The simplified dynamic model of the considered system is illustrated in Figure 2, the electric motor i is represented by a mass point mi (kg) (for i = 1, 2) and rotating radius ri (m), whose rotational velocity is denoted by φi (rad/s). The coupling unit is simplified as a non-linear spring

The 3D model of two co-rotating rotors installed with nonlinear springs.

The simplified dynamic model of two co-rotating rotors installed with nonlinear springs: (a) the dynamic model and (b) three reference frames.
In quiescent state, three coordinate systems coincide with each other, and the coordinates of each motor


Considering the displacement vector of the vibrating system is denoted by


where

According to the mechanical system dynamics basic principle, the expression for the kinetic of the system can be obtained as follows

Here,

where

The total potential energy of the system is given by

And the dissipated energy of the whole system can be expressed as follows

In light of the general form of Lagrange’s equation

Choosing the matrix

where
Method description
The steady approximation responses
It can be seen from equation (11) that the dynamic equations of the vibrating system are mutually coupled with respect to degree of freedom

Since two motors synchronously operate with identical angular velocity

The approximately steady response of dynamic equation (13) can be obtained by applying complex number method, and its solving process is explained in Appendix 1, for which we obtain the following expressions

where

Synchronization condition
Assuming the average phase of two motors and their phase difference to be

In light of the literature,
2
it should be noted that

Considering the instantaneous change coefficients of

From equations (15) and (17), we obtain the following rotating acceleration of two motors

When the vibrating system operates at the steady state, the average value of the instantaneous change coefficients of two motors over one period

with

where those coefficients in the right-hand side of equation (20) are listed in Appendix 2. We note that

where

where
with
In equation (22), symbol
As seen from equation (23), the fist formula is the equilibrium equation for the inertial moment of the vibrating system in the steady state. The first term

where
Here,

From equation (25), in order to guarantee the synchronous operation between the rotors in the steady state, the synchronous torque of two motors must be greater than or equal to the difference of their residual torque.
Stability of synchronous state
Linearizing equation (22) in the vicinity of

where
The parameters of the matrices

where

If the real parts of all roots are negative, the zero solution of equation (26) is stable, that is,

So, we obtain condition of self-synchronization motion stability in the following form

Analyzing equations (24) and (29), it is indicated that the synchronous state and the stability criterion of the vibrating system are influenced by the frequency ratios
Numerical results
Some theoretical derivation in simplified form on synchronization problem for the non-resonance system is given in the preceding sections. In order to clearly master the influence of some parameters of the vibrating system on the synchronous behavior, in this section, the quantitative discussion on solving the phase difference of two motor by numerical method is presented. In light of Zhao et al., 16 while two motors rotate with the same absolute value of their average angular velocities, the electromagnetic torque and the stiffness coefficients in the steady state can be simplified as follows


where
Values for system parameters of the nonlinear vibrating system.

Values for dimensionless parameters according to equation (12).

Numeric analysis in a nonlinear system
For the vibrating system in Figure 1, the coupling unit that its structural parameters satisfy

The stable phase difference with the theoretical computation for

Stable phase difference with the theoretical computation for
From Figure 3, here
On the other hand, from Figure 4, it follows the influence of the parameters
Numerical discussions in before-resonance system
In this section, we explain the influence of the parameters

The approximate theoretical value of the phase difference versus the stiffness of

The approximate theoretical value of the phase difference versus the stiffness of
Figure 6 describes the approximate theoretical value of the phase difference
Numerical discussions in after-resonance system
In after-resonance system, the frequency ration

The approximate theoretical value of the phase difference versus the stiffness of

The approximate theoretical value of the phase difference versus the stiffness of
Computer simulation
To further verify the correctness of the above theoretical analysis, in this section, we will set up an electromechanical coupling model whose rotors are driven by two asynchronous motors with same parameters, using the Runge–Kutaa routine to obtain the stable solution of differential equations (11). Here, the system parameters are listed in Tables 1 and 2.
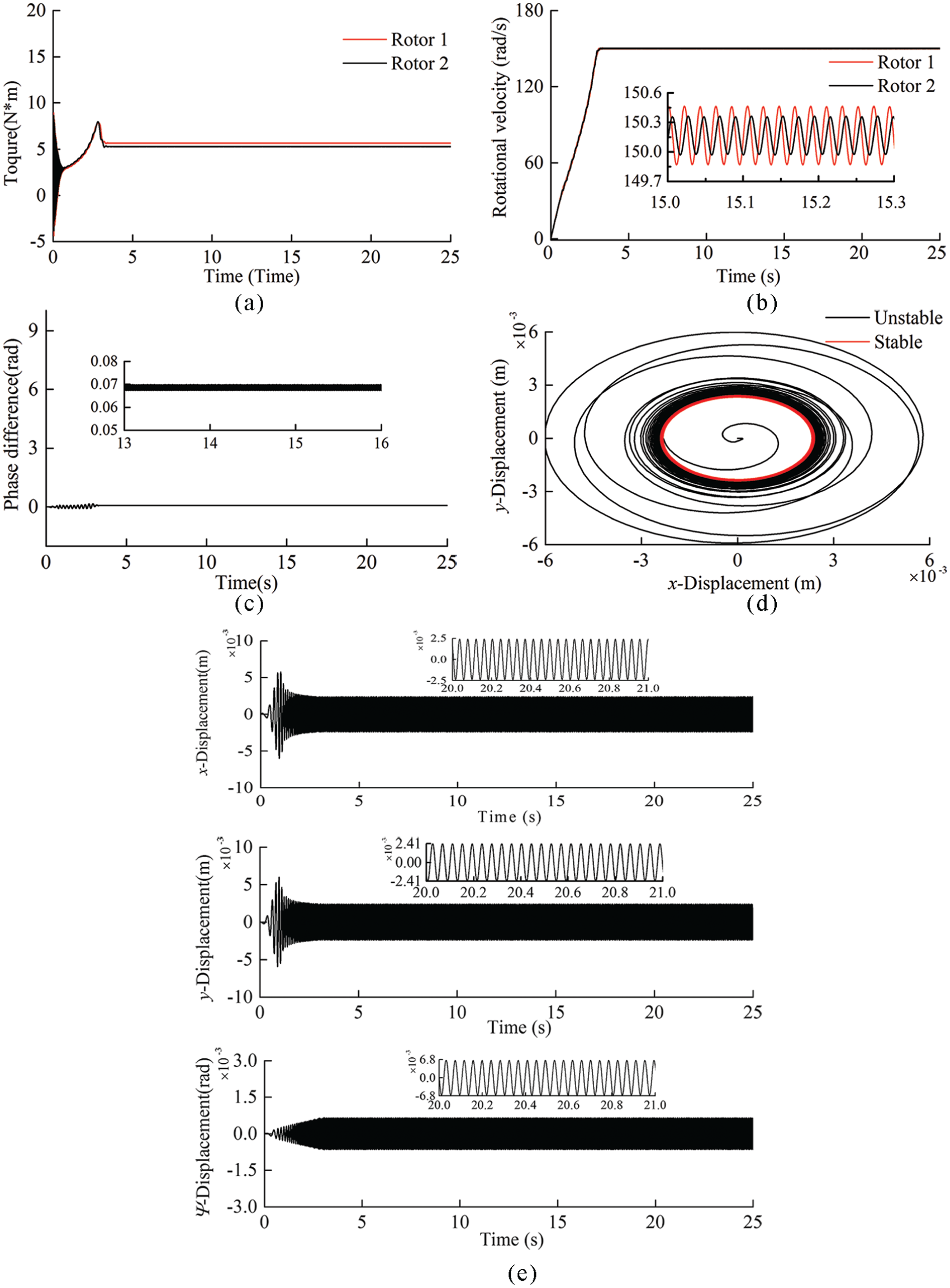
Simulation results in before-resonance system
Simulation results for

Simulation results in before-resonance system: (a) electromagnetic torques of the two asynchronous motors, (b) rotational velocities of the two rotors, (c) phase difference between the two rotors, (d) stable motion of vibration system in
Simulation results in after-resonance system
Figure 9 shows the simulation results for
Simulation results in after-resonance system: (a) electromagnetic torques of the two asynchronous motors, (b) rotational velocities of the two rotors, (c) phase difference between the two rotors, (d) stable motion of vibration system in
Conclusion
In this article, we theoretically and numerically analyze the synchronicity of two co-rotating rotors installed with nonlinear springs in a non-resonance system by using the average method of modified small parameters, and the following conclusions can be stressed.
In order to avoid anti-phase synchronization for two co-rotating rotors system that occurs in engineering, we proposed a mechanical model of two co-rotating rotors installed with nonlinear springs and deduced the non-dimensional coupling equations of two motors in considering case, on which synchronization problem is converted into that of existence and stability of zero solution for the non-dimensional coupling equations of angular velocity. It can be seen that the synchronous torque of two motors must be greater than or equal to the difference of their residual torque when synchronous behavior of the system is implemented. The research results show that the coupling unit, coupling coefficients, and the positional parameters of two rotors have influence on the dynamic characteristics of the vibrating system, and there are clearances in between two nonlinear serial springs, which results in synchronization of the vibrating system that lies in an uncertain state. It also can be found that the stable phase difference between the two motors satisfies
Footnotes
Appendix 1
Appendix 2
Appendix 3
Appendix 4
Handling Editor: Daniela Maffiodo
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study has been supported by the National Natural Science Foundation of China (Grant No. 51705437), Sichuan Science and Technology Program (2018RZ0101).