
Abstract
This study proposes a new uncertain optimization algorithm to suppress vibration of the crankshaft system. In this new algorithm, the interval expression with random-interval hybrid variables is obtained by the confidence level. In addition, the interval order relation, interval probability, radial basis function neural network technology, and multi-objective genetic algorithm are applied to construct uncertain optimization algorithm with random-interval hybrid variables. Moreover, typical examples are used to demonstrate the effectiveness of the proposed algorithm. To suppress vibration of the crankshaft system, the optimization–Latin hypercube sampling design is used to obtain the experimental scheme and the data sampling is performed by multi-body system simulation of the vibration performance. Then, the radial basis function neural network is built considering the torsional displacement and transient stress of the crankshaft. Finally, the uncertain optimization algorithm is operated on the crankshaft structure design of the high-power reciprocating compressor. The results demonstrate that the robustness of the vibration performance and strength property is improved through the uncertain optimization algorithm, compared with that through deterministic optimization. The uncertain optimization algorithm to suppress vibration of the crankshaft system with random-interval hybrid variables is an efficient and effective approach, which is finally proved by the prototype test.
Keywords
Introduction
With the development of natural gas boosting and gathering, higher vibration performance of crankshaft system has become increasingly important in high-power reciprocation. Consequently, slight vibration is demanded urgently.1,2 Furthermore, the crankshaft system of the reciprocating compressor with slight vibration under the condition of high power and high pressure ratio will be the hot spots of industrial engineering in the future. 3
Studies on crankshaft system of high-power reciprocating compressors mainly focus on vibration and stress analyses.4–8 Although vibration and stress analyses of the crankshaft system are available in literature, there are few studies on the optimization of the crankshaft system to suppress vibration. Zhao et al. 9 introduced a variable optimization method for the crankshaft system to suppress vibration. Wang and Xu 10 improved the vibration performance of the crankshaft system on the reciprocating compressor by adjusting some structural parameters of crankshaft on the basis of finite element model. A Almasi 11 optimized the configuration of the compressor critical components to improve the performance and reliability. Although the methods mentioned earlier are effective to obtain the optimal solution, comprehensive vibration performance of the crankshaft system is difficult to achieve, because the traditional deterministic optimization neglects the influence of the uncertain factors. In that way, it may result in larger undulation of vibration performance, lower quality level of the product, and qualified rate of the crankshaft system, since the effect of design variables and uncontrollable noise factors on sensitivity of optimized objective cannot be distinguished.9–11
In the actual application processed about crankshaft system of the high-power reciprocating compressor, there are uncertainties related to geometric features. These uncertainties are mainly derived from structure variables, manufacturing process, judging standard, human factors, and so on. Actually there are model uncertainty and statistical uncertainty that should be considered. 12 Hence, formulating the reasonable scheme of crankshaft structure parameters is the key to improve the vibration performance of the crankshaft system with the consideration of uncertainties. In recent years, the uncertain optimization method has been used in many domains with the consideration of uncertainties such as electricity, aerospace, automobile, and industries. Cheng et al. 13 proposed a constrained uncertain optimization model for the optimization of mechanical performance in a large turbo generator aimed at moving its natural frequencies. Liu et al. 14 used the approximation of a nonlinear interval number programming method to obtain the optimal buffering characteristics of a landing airbag in manned airdrop. Jiang et al. 15 proposed a new nonlinear interval programming to handle uncertain optimization problems of the vehicle crashworthiness. Xia and Yu 16 developed a new uncertain optimization technique based on reliability and confidence interval design for the structural-acoustic system of the automobile passenger compartment. Meng and colleagues17,18 proposed the uncertainty-based design and optimization (UBDO) method based on structural reliability analysis and fluid-structure analysis approach for the optimization of turbine blades. Even though great success has been achieved in the uncertain optimization of many domains, the researches on the uncertain optimization technique with random-interval hybrid variables and its application in suppressing vibration of the crankshaft system on high-power reciprocating compressor remain unreported.
To suppress the vibration, the crankshaft structure should be optimized with the goal of reducing the torsional displacement. And the crankshaft structure should be also optimized with the goal of reducing transient stress to reduce costs of the crankshaft system. The state of vibration and the stress pattern need to be solved on the basis of multi-body dynamical model. Then maximum torsional displacement and peak stress per cycle of the crankshaft are obtained. In the multi-body dynamical model of the crankshaft system, function relationship between maximum torsion displacement, peak stress, and design variables are implicit.6,8 Therefore, the radial basis function (RBF) neural network theory is introduced for the optimization of the crankshaft to suppress vibration of the crankshaft system.
In this article, a new uncertain optimization algorithm with random-interval hybrid variables is proposed based on the theory of confidence level, considering the vibration characteristics, mechanical properties, and uncertainty of the crankshaft system. In addition, the interval order relation, interval probability, RBF neural network technology, and multi-objective genetic algorithm are applied in this new uncertain optimization algorithm. Then, the Pareto set is obtained and the designer can choose the optimization results according to their demands of vibration performance and strength property.
Uncertain optimization algorithm with random-interval variables
Uncertain optimization algorithm
A new uncertain optimization algorithm with random-interval variables is applied in design of crankshaft to suppress vibration of the crankshaft system on high-power reciprocating compressor. The uncertain optimization algorithm issues mainly focus on the effective optimization strategy to achieve concurrent design of each performance index and obtain the satisfactory solution. The strategy can combine the knowledge from design objects with optimized algorithm and develop an effective method to solve the uncertain multi-objective optimization of complex objects.19,20
The uncertain optimization algorithm can be represented as

where f(x, c) represents uncertain target vector, g(x, c) represents constraint function, b I represents interval of uncertain constraint function, b L represents lower bound of uncertain constraint function, b U represents upper bound of uncertain constraint function, x represents decision vector, xL represents lower bound of decision vector, xU represents upper bound of decision vector, c represents uncertain decision vector including random and interval parameter, cL represents lower bound of uncertain decision vector, cU represents upper bound of uncertain decision vector, l represents quantity of uncertain target vector, m represents quantity of constraint function, p represents quantity of decision vector, and q represents quantity of uncertain decision vector.
The uncertain optimization algorithm cannot obtain optimal solutions of all objectives simultaneously. And arbitrary solution of Pareto set will possibly become the satisfactory solution. 20
Conversion of uncertain objective function
For the minimization problem of uncertain optimization algorithm, Jiang and colleagues,20,21 Ishibuchi and Tanaka,
22
and F Li et al.
23
define five different order relations from interval mathematics to transform the uncertain objective function. The order relations include

where the following optimization problems must be solved

Then, the formula (2) can be transformed via linear combination as

where
The normalization factors

The two mentioned variables can be set to the same dimensional level as the corresponding objective in practical applications, which can avoid a large number annihilating a small number.
Conversion of uncertain constraint function
The uncertain constraint function of uncertain multi-objective optimization can be transformed by probability of the interval.19,22,23 The construction method of probability of the interval can be divided into fuzzy collection method24–26 and probability method.22,23 The subjectivity exists among the choice of membership function in fuzzy collection method, which makes the objectivity of probability of the interval weaker. Hence, the probability method is used to construct the probability of the interval. Each uncertain constraint function in formula (1) can be transformed as

where
The lower and upper bounds of the interval

Conversion of random parameter
The variables can be divided into random variable, fuzzy variable, and interval variable based on the uncertainty characterization of the variables.28–30 The stochastic program and interval program cannot be directly used to construct the optimization of the uncertain optimization algorithm which contains random and interval hybrid variables.30–34 However, the random variable can be transformed into interval variable based on the theory of confidence level.
Supposing the random variable Y follows the normal distribution (μ, σ), the probability distribution can be represented as 33

where μ represents mean of the random variable Y, σ represents variance of the random variable Y,
The fractile
According to the formula (8), the maximum and minimum of the variable Y under confidence level

Then, the random variable Y can be approximated as interval variable Y′ on the basis of formulas (8) and (9). And the interval expression is
The non-normal random variable can be transformed into the equivalence normal variable. Then, they can be transformed into interval variable on the basis of formulas (8) and (9). The equivalence changing process can be represented as 26


where X represents arbitrary non-normal random variable,
On the basis of formulas (8)–(11), the random-interval hybrid variables can be transformed into interval variables. Then, the uncertain optimization algorithm with random-interval variables can be solved by interval program. 35
Solving of the uncertain multi-objective optimization
For the simplified calculation, the penalty function method 35 is used to change the formulas (4) and (6) using

Here, the factor

The mentioned uncertain multi-objective optimization problem is solved by a double-loop nest optimization. The outer loop adopts NSGA-II (Nondominated Sorting Genetic Algorithm II) and the inner loop adopts DA because of the multi-objective and nonlinear programming of the transformed deterministic optimization model. In that way, small computing capacity and diversity of population can be ensured, which can avoid the loss of excellent individual. The inner loop adopts DA to calculate the fitness values decided by the optimization objective and the optimization constraint. And the objectives and the constraints are handled in order in the inner loop. The outer loop adopts NSGA-II to obtain the optimal solution. The analysis result of numerical simulation on the crankshaft system needs to be invoked many times during the uncertain multi-objective optimization of the crankshaft to suppress vibration of the crankshaft system. However, every numerical simulation consumes a large amount of computing resources and time. Hence, the efficiency of the optimization method cannot meet the requirement of crankshaft design due to its calculation time of the numerical simulation. Second, the element shape is controlled for the crankshaft transient strength. During the numerical simulation, the distortion of element shape will appear, and it will cause the failure of the numerical simulation. Consequently, the whole procedure of the optimum design will be ended. The mentioned problems can be solved by RBF neural network model. The RBF neural network theory can construct a mapping relationship between design variable and objective function based on test information during hyperspace. Then, the original complex process of numerical simulation can be replaced by mathematical approximate model, which can save much time for iterative calculation of the optimization method.
Each response is mapped to RBF neural network approximate model on the theory of the RBF neural network. It is shown in Figure 1.

Radial basis function neural network approximate model of the crankshaft system.
The radial basis vector of RBF neural network approximate model H can be described by31,32

here, hp is basis function, which is set to Gaussian function. The basis function hp can be calculated by

here X is input vector,
The output connection weights of the RBF neural network approximate model W can be described by

Then, the output vector S can be described by

To avoid the effect of numerical value and dimension of the objective function, the normalization processing of experiment data is carried out, which can be described as

here, Yi is input values of normalization neural network, yi is experimental data, yimin is the minimum experimental data, and yimax is the maximum experimental data. Then, the experimental data can be transformed into interval [0.1, 0.9].
The RBF neural network approximate model can be solved by combining the formulas (14)–(18). As the RBF approximate model between input variables and its analysis targets cannot be described by a explicit function, correlation coefficients (R 2 ) are used to evaluate the degree of approximation between each model. 36 The better the fitting of the surrogate model is, the closer the R 2 is to 1. The correlation coefficients can be described by

where n is the number of sample point.

The fitting of the approximate model can be solved by formulas (18)–(20). The flow chart of uncertain multi-objective optimization based on interval analysis is shown in Figure 2.

Flow chart of the uncertain multi-objective optimization based on interval analysis.
Numerical example
Test function
In this section, two typical numerical test functions are used to show convergence of the proposed method on the uncertain multi-objective optimization problems. The test function (1) is expressed as

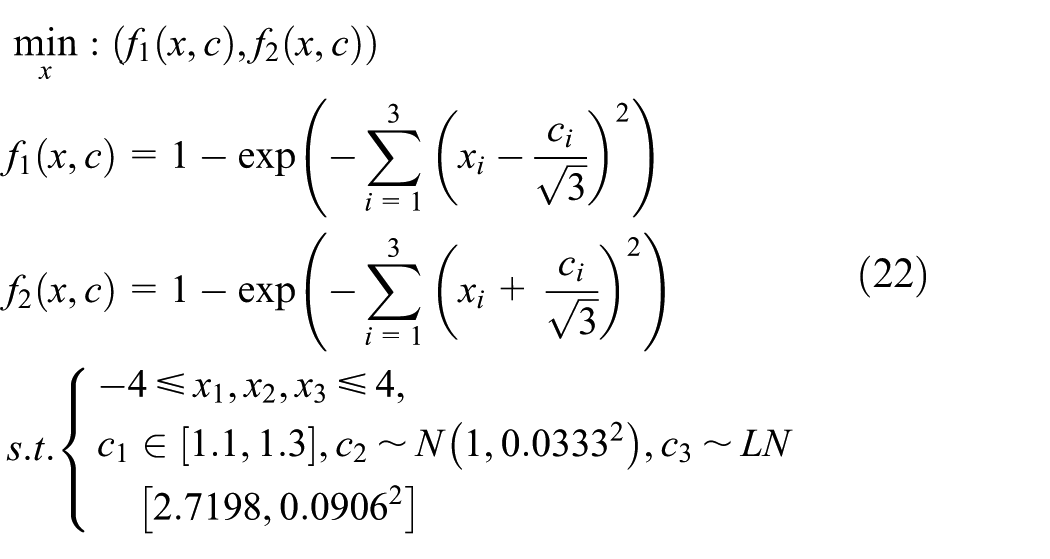
The second test function (2) is a more complex three-dimensional test function, defined as
Conversion of test function
Test function (1) has two design variables, one is interval variable and the other is random variable, which follows the normal distribution. The optimization of test function (1) belongs to uncertain multi-objective optimization which contains random and interval hybrid variables. The confidence level

Test function (2) has three design variables, one interval variable and two random variables, which follow the normal distribution and lognormal distribution, respectively. The optimization of test function (2) belongs to uncertain multi-objective optimization which contains random and interval hybrid variables. The confidence level

Here, there are only design variables and interval variables in formulas (16) and (17). Solving formulas (16) and (17) belongs to uncertain multi-objective optimization which simply contains interval variables. And the true Pareto set is known by Jiang et al. 19 and Ishibuchi and Tanaka. 22
Parameter setting of optimization solution
In these two test functions, the objective functions and constraints are constructed by RBF neural network. The parameter ξ is specified to be 0, and the normalization factors
Parameter settings of NSGA-II.

NSGA-II: Nondominated Sorting Genetic Algorithm II.
Parameter settings of DA.

DA: dragonfly algorithm.
Effectiveness of optimization solution
Limbourg and Aponte 33 introduced AD measures to prove the effectiveness of the optimization algorithm. AD measures can describe the approximation of the obtained Pareto set by mentioned method to the true Pareto set. And the obtained Pareto set by mentioned method is more similar to the true Pareto set when the AD measure is much closer to 1. AD measures can be represented as

here X* is the obtained Pareto set by mentioned method,
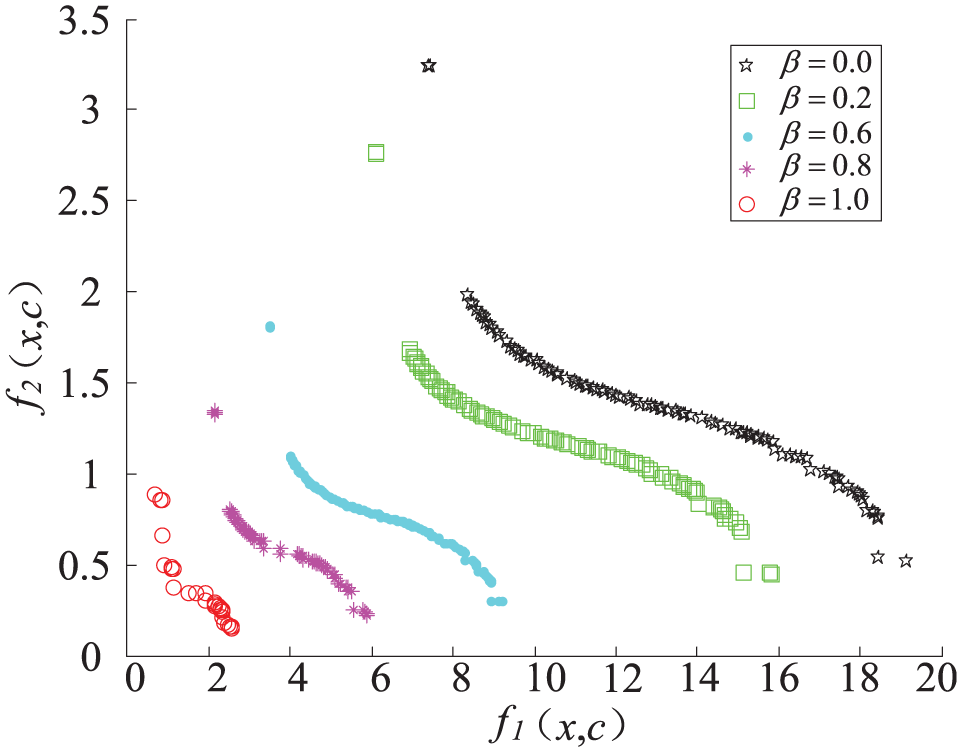
Figure 3 shows the true Pareto points of test function (1) obtained from different probabilities of the interval when the weighting factor is set to be 0.5. Figure 4 shows the true Pareto points of test function (1) obtained from different weighting factors when the probabilities of the interval is set to 0.8. Figure 5 shows the true Pareto points of test function (2) obtained from different weighting factors.

Non-inferior Pareto set of different
Non-inferior Pareto set of different

Non-inferior Pareto set of different
In the above numerical test functions, the objective functions and constraints are constructed by the RBF neural network. And the number of samples is 20. For the test function (1), the obtained Pareto set with different probabilities of the interval is similar to the true Pareto set when the weighting factor is set to be 0.5, as shown in Figure 6(a)–(e). In Figure 6(a)–(e), the optimal penalty function value increases with the increase of interval probability. The large probability of the interval makes feasible region of converted deterministic optimization become small, which leads to the deteriorative objective function value. And the feasible region is largest when the probability of the interval is set to 0, as shown in Figure 3. Several parts of function

The Pareto points from test function (1) using different probabilities of the interval: (a)
In Figure 7(a)–(e), the obtained Pareto set with different weighting factors of test function (1) is similar to the true Pareto set when the probabilities of the interval is set to 0.8. For the test function (2), the obtained Pareto set with different weighting factors is similar to the true Pareto set, as shown in Figure 8(a)–(e). According to Figures 7(a)–(e) and 8(a)–(e), the optimal penalty function value decreases with the increase of weighting factor. It is the large weighting factor that makes penalty function have more preference on radius of objective function interval. However, the radius of objective function interval is much smaller than the mid-point of objective function interval. Hence, the penalty function value becomes smaller gradually.

The Pareto points from test function (1) using different weighting factors: (a)

The Pareto points from test function (2) using different weighting factors: (a)
According to Figures 6–8, Pareto set has changed with the different probabilities of the interval and weighting factors. Appropriate parameters
AD measures.

Uncertain multi-objective optimization of the crankshaft structure to suppress vibration
Boundary condition of crankshaft system
The boundary condition of crankshaft system is shown in Figure 9. The model of the crankshaft system is shown in Figure 10. The revolute pair between crankshaft with ground is built in main bearing (1)–(6). And the revolute pair between crankshaft with connecting rod is built in crankpin I–VI. The translation pair between crosshead and ground is built. Forces in the reciprocating compressor can be divided into gas forces, piston lateral impact forces, and inertia forces. AKISPL interpolation is used to create the gas forces, which are applied on the translation pair of crosshead. In the calculation example, the rotate speed of crankshaft is set to 994 r/min, the manifold pressure is set to 2.0 MPa, and the exhaust pressure is set to 6.0 MPa. The type of cylinder is double-acting.
Boundary condition of the crankshaft system.

Model of the crankshaft system.
Simulation of crankshaft system
The elastic deformation of the structure is solved approximately by linear combination of suitable modes that can be represented as

where [u] represents displacement matrix, [φ] represents modal shape function matrix, and [q] represents vector of modal coordinates.
An elastic body contains two types of nodes: interface nodes, where forces and boundary conditions interact with the structure during multi-body system simulation, and interior nodes. In the multi-body system simulation, the position of the elastic body is computed by superposing its rigid body motion and elastic deformation. In ADAMS, this is performed using “Component Mode Synthesis” technique based on Craig–Bampton method. 3 The component modes contain static and dynamic behavior of the structure. The modal transformation between the physical degrees of freedom (DOF) and the Craig–Bampton modes and their modal coordinates is described by

where uB represents column vectors of boundary DOF, u1 represents column vectors of interior DOF, I represents identity matrix, 0 represents zero matrix, φC represents matrix of physical displacements of the interior DOF in the constraint modes, φN represents matrix of physical displacements of the interior DOF in the normal modes, qC represents column vector of modal coordinates of the constraint modes, and qN represents column vector of modal coordinates of the fixed boundary normal modes.
Formula (20) can be solved because constrained modes and normal modes are orthogonalized.
Elastic 3D solid crankshaft model of reciprocating compressor is obtained in ANSYS using modal superposition method. First, 3D solid model of the crankshaft is imported to ANSYS and finite element model of the crankshaft, which is characterized by about 269,612 ten-node tetrahedral elements and 452,154 nodes, is obtained. Flexible crankshaft model is obtained through modal synthesis considering the first 30 fixed boundary normal modes. This model is imported to ADAMS/View and the 3D finite element model is run with ADAMS. Then, the torsional displacement per cycle on drive end of the crankshaft is shown in Figure 11, and the stress pattern of the peak stress per cycle is shown in Figure 12. Finally, the maximum torsional displacement per cycle and the peak stress per cycle of the crankshaft are obtained.

The torsional displacement per cycle on drive end.
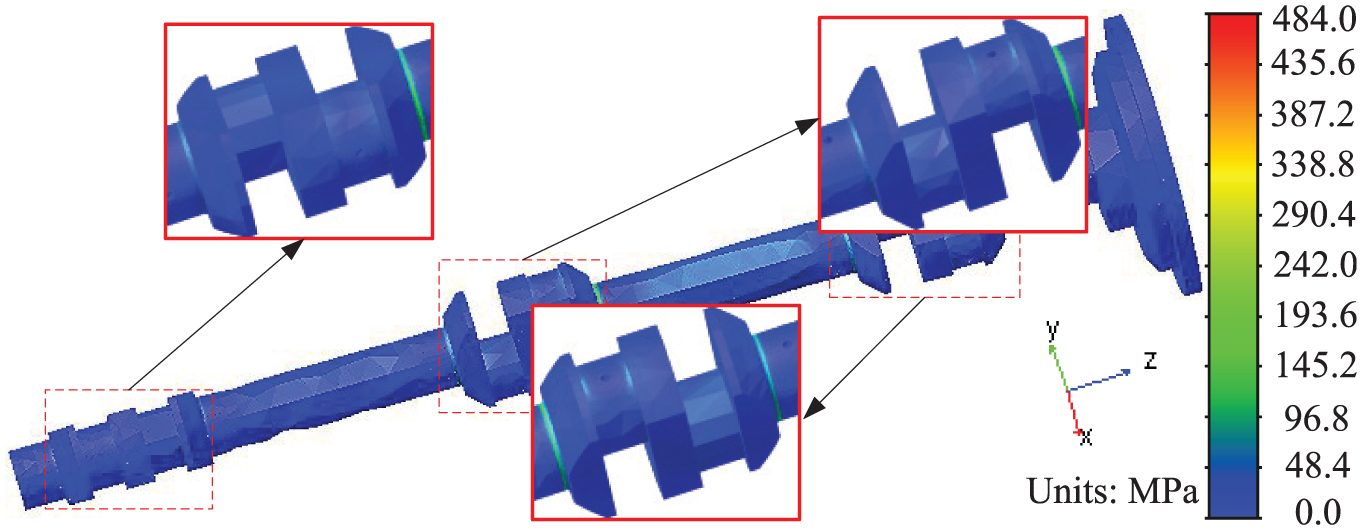
The stress pattern of the peak stress per cycle.
In Figure 11, the torsional displacement per cycle on drive can be converged after initial iterations, which induces an obvious periodic curve in convergence region. And the maximum torsional displacement per cycle is 0.502°. In Figure 12, the peak stress of the crankshaft is located in sudden changes of geometry, such as oil passage, transitional fillet, and weight-lowing holes. And the peak stress is 484 MPa, which is significantly higher than other locations. The reason for this phenomenon is that the stress concentration is produced in sudden changes of geometry, which can be suppressed by the resizing of the oil passage, transitional fillet, and weight-lowing holes.
Design variable
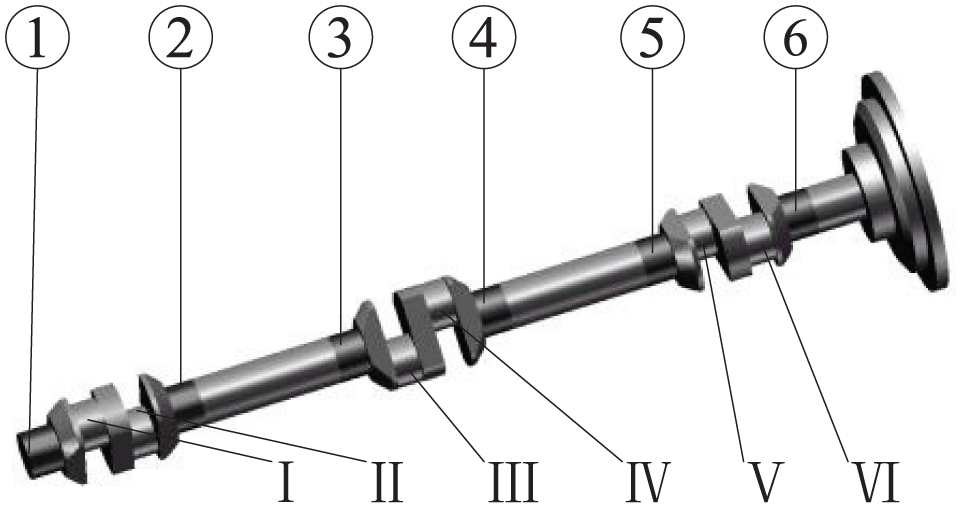
According to the Figures 11 and 12, the structure of the crankshaft system has an important effect on the torsional vibration and strength. As the crankshaft is constrained by the dimension and assembly of connecting rod, frame, and other parts, the dimension of crank journals, crankpins, and bore spacing cannot be changed in this calculation example. Consequently, transitional fillet (x1), oil passage (x2), and shape parameters of weight-lowing holes (x3, x4, x5) are chosen as the design variables, which is shown in Figure 13. Then, the vibration of the crankshaft system can be suppressed by the uncertain optimization with random-interval parameters.

Design variables of crankshaft.
Optimized objective function
To suppress the vibration, Moallem 37 presented a wave-based modeling and control approach for reducing torsional displacement of an elastic shaft driven by a motor at one end and an inertial load at the other end. Shum et al. 38 used multiple pressurized tuned liquid column dampers to reduce torsional displacement responses of the long-span bridge under wind excitation. Hence, the crankshaft structure should be optimized with the goal of reducing the torsional displacement to suppress the vibration. Although strength is not equal to vibration, the strength property is related to the choice of materials of the crankshaft system. Then, the costs of the crankshaft systems can be decreased. In addition, the relationship between the vibration performance and stress property may be paradoxical. The improvement of the vibration performance will be achieved at the expense of the stress property, which is not benefiting the costs of the crankshaft system. Hence, the crankshaft structure should be also optimized with the goal of reducing transient strength to reduce costs of the crankshaft system.
Experiment design
Optimization–Latin hypercube sampling design (Opt-LHD) is applied to obtain the experimental scheme and the data sampling is performed by multi-body system simulation of the vibration performance. The RBF neural network model considering the maximum torsional displacement per cycle and peak stress per cycle of the crankshaft is built. The experimental scheme is listed in Table 4.
Experimental scheme based on Opt-LHD.
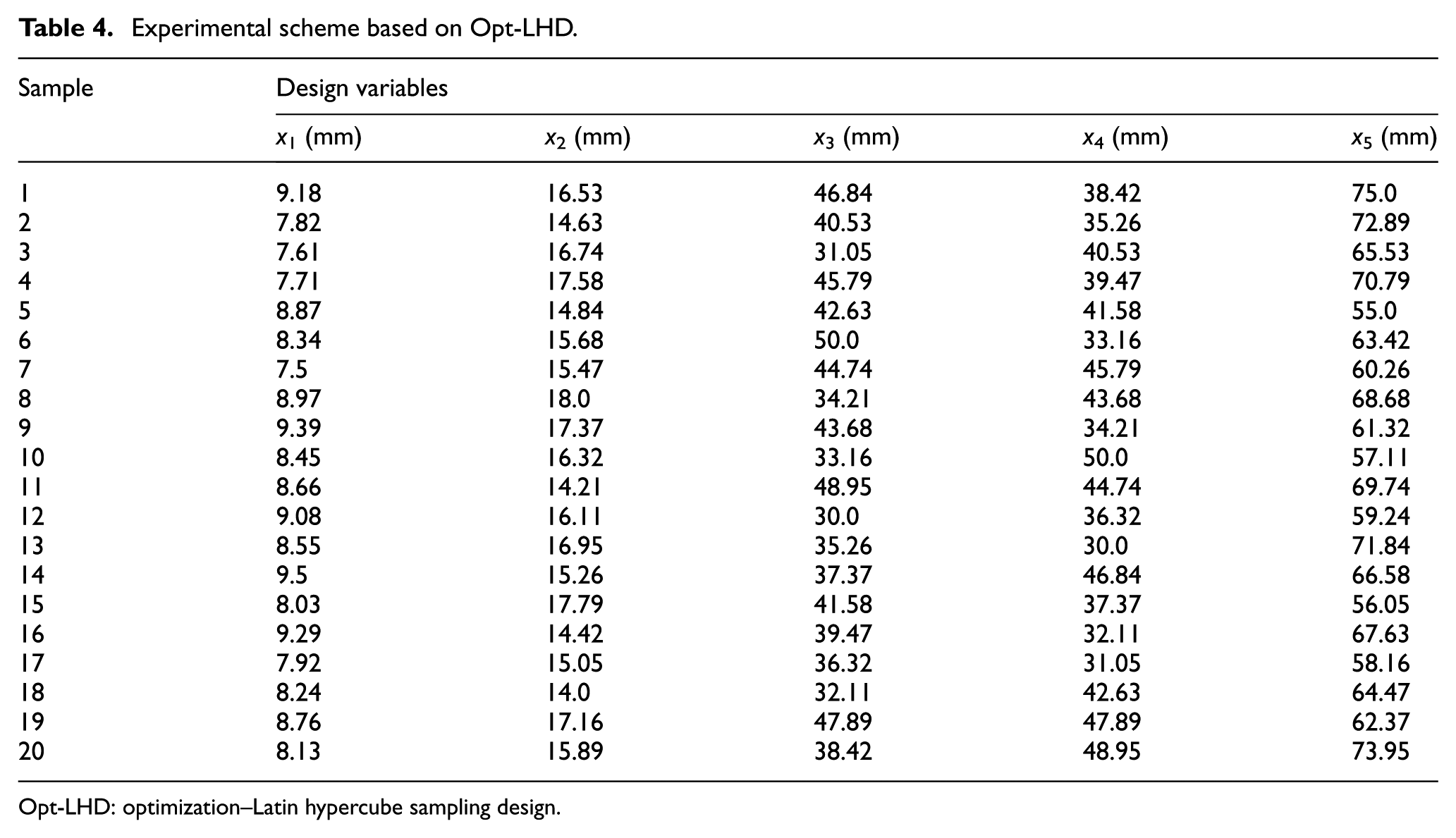
Opt-LHD: optimization–Latin hypercube sampling design.
The times of training is set to 20 based on the parallel computing. The result is listed from Figures 14 and 15.

Result of the peak stress per cycle.

Result of the maximum torsional displacement per cycle.
Approximate model
The RBF neural network approximate model of the maximum torsional displacement per cycle and peak stress per cycle of the crankshaft can be solved by combining formulas (14)–(18). The response surfaces of maximum torsional displacement per cycle and peak stress per cycle of the crankshaft are plotted in Figures 16 and 17.

Normalization response surface of the maximum torsional displacement.
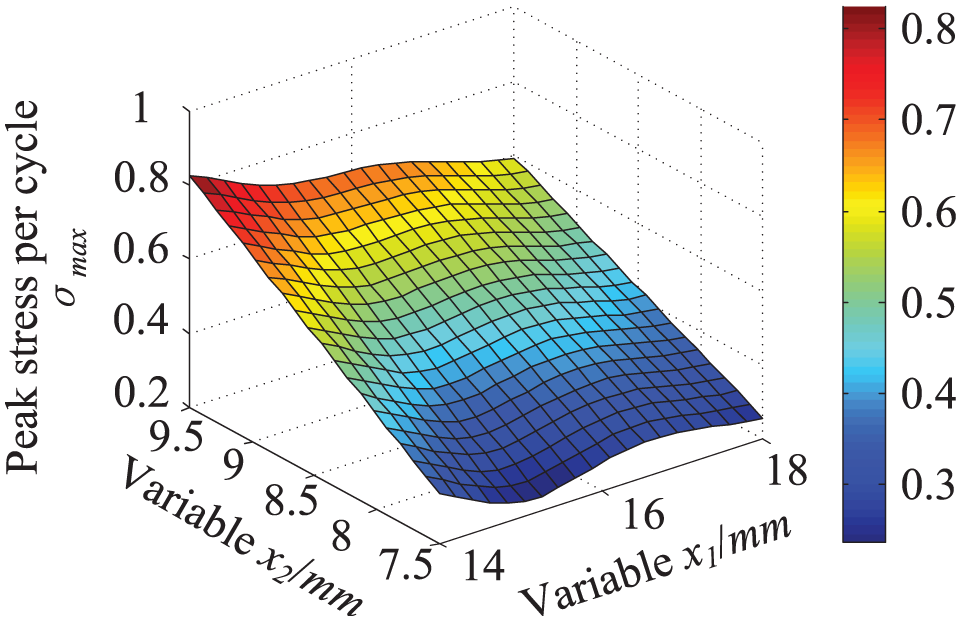
Normalization response surface of the peak stress per cycle.
The correlation coefficient values of the RBF approximate model corresponding to peak stress per cycle and maximum torsional displacement per cycle of the crankshaft are more than 0.90 solved by formulas (18)–(20). The results show that the approximate model of the RBF approximate model can truly reflect function mapping between design variable and analysis objective. The approximate model corresponding to design variable is acceptable and can be used to construct optimization of the crankshaft.
Uncertain multi-objective optimization of the crankshaft structure
The uncertain multi-objective optimization of the crankshaft structure can be represented as
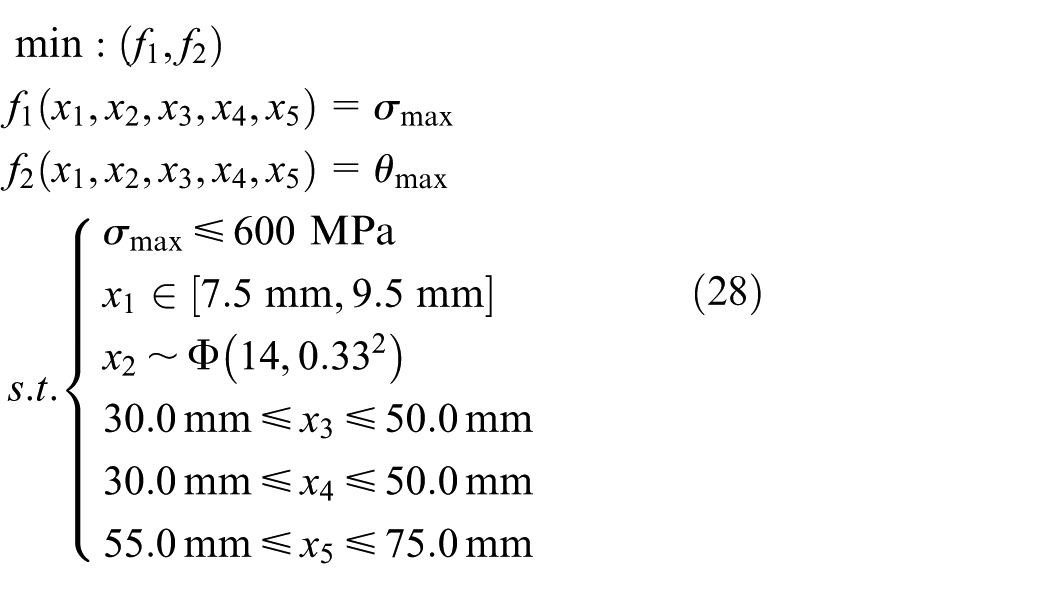
where f1 is peak stress per cycle of the crankshaft, f2 is the maximum torsional displacement per cycle of the crankshaft, and Ф(•) is the normal distribution function.
The probability of the interval is set to 0.9, weighting factor is set to 0.5, and the confidence level is set to 0.9773. The parameter settings of the optimization algorithm are identical with Tables 1 and 2. To compare the robustness of the deterministic optimization with the uncertain optimization, the probabilities of the interval and confidence level are set to 0. Then, the uncertain multi-objective optimization can be transformed to deterministic optimization. The optimization result is shown in Figure 18.

Pareto set of the maximum stress and the torsional displacement.
In Figure 18, the maximum torsional displacement per cycle of the crankshaft decreases with the increase of peak stress per cycle. Consequently, the relationships between the maximum torsional displacement and the peak stress per cycle are paradoxical. The improvement of one object is often at the expense of the decline of the other. Designers can choose the satisfactory optimization results by the requirement of the actual production. There is discontinuous phenomenon of Pareto point obtained on uncertain optimization, compared with deterministic optimization, since several parts of function, f1 and f2, cannot meet the constraint condition with the increase of the probability of the interval and confidence level.
The point A is chosen as the final optimization result of the uncertain optimization and point B is chosen as the final optimization result of the deterministic optimization. The optimization result is listed in Table 5.
Comparison of optimization result.

In Table 5, the suppression ratio of the maximum torsional displacement per cycle is 8.17% through deterministic optimization. Considering the influence of the uncertainties, the suppression ratio of the maximum torsional displacement per cycle is 7.17% through uncertainty optimization. The vibration of the crankshaft system has been suppressed effectively. In addition, the suppression ratio of the peak stress per cycle is 31.8% through deterministic optimization. And the suppression ratio of the peak stress per cycle is 27.9% through uncertainty optimization with the consideration of uncertainties. Then, the strength property has been significantly improved. Twenty combinations of parameters x1 and x2 are chosen randomly in order to compare the robustness of the deterministic optimization with the uncertain optimization in the fluctuation range of the parameters. And the 20 random situations have been simulated by multi-body system simulation. The fluctuation of the objective functions is shown in Figure 19.

The fluctuation of the objective functions: (a) maximum torsion displacement per cycle and (b) peak stress per cycle.
In Figure 19, the fluctuation of the objective functions of the uncertain optimization is smaller than that of the deterministic optimization. And the uncertainty optimization result of the maximum torsional displacement per cycle is smaller than 0.475°, which means that the smallest suppression ratio is 5.38%. The uncertain optimization can improve the robustness of the objective functions. Accordingly, the uncertain optimization of the crankshaft structure which considers the uncertainties of production process can improve the property of crankshaft and ensure product robustness.
The uncertain multi-objective optimization of the crankshaft structure needs to be simulated for 20 times. Each simulation spends approximately 12 h. Therefore, it costs approximately 18 h in total due to the parallel computing. And the optimization costs approximately 1 h. Besides, there is no experiment cost due to the multi-body system simulation. However, the optimization of the crankshaft structure through the experiment of the compressor needs the actual prototype. As a result, there is experiment cost. And the manufacturing cycle of the high-power reciprocating compressor is nearly 4 months. The mentioned method can significantly reduce development cycle and costs, compared with the experiment method.
Prototype test
According to the optimization results, a high-power reciprocating compressor is manufactured and the test is carried out, as shown in Figure 20. The working condition of the reciprocating compressor is enclosed and the gas is flammable, so only the torque and the speed of the drive end on crankshaft system are tested. The relationship between the torsional displacement θ and the torque T can be described by 4

where l represents gauge length of the elastic crankshaft section, G represents shear modulus of the elastic crankshaft section, and D represents diameter of the elastic crankshaft section.

Schematic of the crankshaft system prototype test on the reciprocating compressor.
After the dimensions of the transitional fillet and oil passage are measured, the transient simulation is performed at these dimensions. Table 6 compares the maximum torsional displacement per cycle and peak stress per cycle between optimization, simulation, and measured. The comparison of the torsional displacement per cycle on drive end is shown in Figure 21.
Comparison of the data at current state.


Comparison of the torsional displacement per cycle on drive end.
In Table 6 and Figure 21, the test results are almost the same as the simulation with the same design variables. Reason for certain error is that there are elasticity of connecting rod and piston rod, machining tolerance, installation error, and material property deviation. However, there is some difference between the optimal results and the test results. It is because the values of oil passage and weight-lowing holes between the optimal model and test model are different. These factors are identified as noise factors and the further research about that will be carried on.
The test results of the optimized model show that the suppression ratio of the maximum torsional displacement per cycle is 7.77%, and the simulation results show that the peak stress per cycle decreases by 25.41%. The prototype test verifies that the mentioned uncertain optimization is effective for optimizing the crankshaft system on the high-power reciprocating compressor to obtain slight vibration and less stress. Further research taking more noise factors into account will be carried on.
Conclusion
The uncertain optimization problem containing random and interval variables is studied. The interval expression with random variable is obtained by using the theory of the confidence level. Then, the multiplicity of the design variables can be guaranteed. And the uncertain optimization with random-interval hybrid parameters can be solved by interval program.
The interval order relation, interval probability, RBF neural network technology, and multi-objective genetic algorithm are applied to construct uncertain optimization method based on random-interval hybrid parameters, which can enhance the optimization efficiency. And the typical examples demonstrate the effectiveness of this method.
The RBF neural network theory is combined with multi-body system simulation, which can significantly reduce the calls of simulation. In the process of crankshaft optimization adopted to suppress vibration of the crankshaft system, the influence of random-interval hybrid parameters is considered. And the uncertain multi-objective optimization problem of the crankshaft is solved by a double-loop nest optimization, which can control and eliminate system uncertainty. Then, the stability and robustness of the vibration performance and strength properties can be ensured, so as to suppress the vibration of the crankshaft system. In addition, the mentioned method can significantly reduce development cycle and costs, compared with the experiment method. Finally, the prototype test is carried out to verify the effectiveness of the mentioned method.
Footnotes
Handling Editor: José Correia
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by basic public welfare research project of Zhejiang province—LGG19E050009 (the research of uncertainty theory and robust design method for shaft vibration of piston compressors).