
Abstract
A novel framework of rapid exponential stability and optimal feedback control is investigated and analyzed for a class of nonlinear systems through a variant of continuous Lyapunov functions and Hamilton–Jacobi–Bellman equation. Rapid exponential stability means that the trajectories of nonlinear systems converge to equilibrium states in accelerated time. The sufficient conditions of rapid exponential stability are developed using continuous Lyapunov functions for nonlinear systems. Furthermore, according to a variant of continuous Lyapunov functions, a rapid exponential stability is guaranteed which satisfies some canonical conditions and Hamilton–Jacobi–Bellman equation for controlled nonlinear systems. It is can be seen that the solution of Hamilton–Jacobi–Bellman equation is a continuous Lyapunov function, and, therefore, rapid exponential stability and optimality are guaranteed for nonlinear systems. Last, the main result of this article is investigated via a nonlinear model of a spacecraft with one axis of symmetry through simulations and is used to check rapid exponential stability. Moreover, for the disturbance problem of initial point, a rapid exponential stable controller can reject the large-scale disturbances for controlled nonlinear systems. In addition, the proposed optimal feedback controller is applied to the tracking trajectories of 2-degree-of-freedom manipulator, and the numerical results have illustrated high efficiency and robustness in real time. The simulation results demonstrate the use of the rapid exponential stability and optimal feedback approach for real-time nonlinear systems.
Keywords
Introduction
Nonlinear systems have many applications in natural science and practical engineering. According to the fact that stabilities are frequently encountered in science and engineering systems, for instance, physical system, mechanical system, biological system, chemical system, robotic system, and so on.1–5
In the study of nonlinear systems’ applications, people have researched the stability of such systems and developed various conditions for asymptotic stability or exponential stability. Moreover, exponential stabilities of nonlinear systems have been investigated during the past few years and the references therein.6–8 Particularly, more and more people have paid increasing attention to the problem of rapid exponential stability of nonlinear systems in recent years.9,10 For nonlinear systems, a classical Lyapunov method to exponential stability of an equilibrium point requires that there exists a Lyapunov function with some basic properties. Indeed, the exponential stability of an equilibrium point is equivalent to the existence of a Lyapunov function for nonlinear systems. In Aeyels and Peuteman, 11 the exponential stability has been proved for nonlinear time-varying systems; what’s more, the negative definiteness of the derivative of Lyapunov function was not required. However, in order to get such stability of an equilibrium point for nonlinear time-varying systems, a sequence of time should be satisfied with the descent property of the positive definite functions. Furthermore, the bounded positive definite function should be given. Ngoc 12 proposed several explicit criteria for the global exponential stability of nonlinear systems with time-varying delay. Moreover, the advantaged criteria can be easy to investigate and analyze the exponential stability of equilibriums for the complex nonlinear systems. According to the multiple local quadratic Lyapunov functions, Pettersson and Lennartson 13 have developed an exponential stability for nonlinear autonomous systems. Indeed, the sufficient conditions of stability were derived by linear matrix inequalities (LMIs). Furthermore, the overall Lyapunov functions were allowed to be discontinuous at the states of nonlinear autonomous systems where the trajectories traversed from one local domain to another. However, according to the uncertainty or noise, the discontinuous property of the states of nonlinear autonomous systems might lead to chattering phenomena for actual applications. To cope with this difficulty, Shen and Wang 14 developed results on the robustness of global exponential stability of nonlinear systems with random disturbances and time delays. Nevertheless, the controlled nonlinear systems were not considered in Shen and Wang. 14 Recently, problems of necessary and sufficient conditions of nonlinear systems have attracted much attention from researchers.15–17 Bernstein 18 developed sufficient conditions for asymptotic stability and optimality of nonlinear systems. Combined Hamilton–Jacobi–Bellman equation (HJBE) and Lyapunov theorem, the asymptotic stability and optimality were guaranteed for nonlinear systems. According to the basic idea of the results of Bernstein, 18 the finite-time stable and optimal feedback controllers were proposed and investigated for nonlinear systems.19–21 The most important features of HJBE are as follows. First, the theoretical solution of the HJBE is obviously showed to be a Lyapunov-like function for the closed-loop system which satisfies a differential inequality involving an accelerator, and hence, guaranteeing both rapid exponential stability and optimality. Second, to overcome the complexity in solving the theoretical solution of HJBE, a family of rapidly exponentially stabilizing controllers are parameterized so as to minimize some cost functional. Therefore, owing to different parameters in the Lyapunov-like function and the cost functional, the developed framework could be used to achieve a class of rapidly exponentially stabilizing controllers that could satisfy closed-loop system. However, to the best of our knowledge, there are not many sufficient conditions for rapid exponential stability of nonlinear dynamical systems through HJBE and rapid exponential Lyapunov theorem. In general, it is difficult to construct optimal feedback controllers for nonlinear systems. Recently, Sui et al.22–25 developed, investigated, and analyzed the non-triangular stochastic nonlinear systems via adaptive fuzzy control theory. However, the nonlinear system is considered and investigated in this article and the uncertain stochastic nonlinear systems with non-triangular form is investigated and analyzed in Sui et al.22–24 Furthermore, it is a keynote step which is the criterion of stochastically semiglobal finite-time stable for the uncertain stochastic nonlinear systems with non-triangular form. In addition, the sufficient conditions of rapidly exponentially stabilizing are developed and analyzed using a variant of continuous Lyapunov functions and HJBE for nonlinear systems in this article. To reduce the complexity of calculation by choosing the quadratic Lyapunov function, the proposed control method is used solve the tracking problem in non-triangular stochastic nonlinear system under a reasonable assumption in Sui et al. 22 However, how to construct the finite-time controller is a main difficulty based on the semiglobal finite-time stable in probability.
The rest of this article is organized as follows: we will extend the framework proposed in Bernstein 18 and Haddad and L’Afflitto 19 to achieve the problem of rapid exponential stability for nonlinear systems. Section “Notations and definitions” reviews the relative notations and definitions of nonlinear systems. Moreover, the sufficient conditions of rapid exponential stability have been developed using continuous differential Lyapunov function with performance functional for nonlinear systems. Section “A new rapid exponential stability for controlled nonlinear system” solves the optimal controller of controlled nonlinear systems via HJBE. Sufficient conditions for optimality are developed for the controlled nonlinear systems. Furthermore, according to the rapid exponential Lyapunov function, the rapid exponential stability of controlled nonlinear systems is proposed in this section. In section “A rapid exponential stability for controlled nonlinear affine system,” an optimal exponential stability of nonlinear affine systems is considered and sufficient conditions based on the HJBE and Lyapunov theorem are utilized to obtain an optimal feedback control law. Due to the HJBE and Lyapunov theorem, a rapid exponential Lyapunov function guarantees both rapid exponential stability and optimality for the nonlinear controlled affine systems. The spacecraft model with one axis of symmetry and 2-degree-of-freedom manipulator will be illustrated and investigated in section “Simulations.” Finally, section “Conclusion and future works” describes the conclusions and future works for nonlinear systems. Furthermore, the proposed framework may be extended to address rapid exponential controllers for manipulator systems, 26 path planning,27,28 bipedal walking systems,29,30 and mobile robot systems. 31
Before ending this introductory section, we highlight the main contributions of this article in the following facts. There are three important contributions to this article. The first one is a rigorous proof of rapid exponential stability for nonlinear systems. Moreover, some simply sufficient conditions are developed for controlled nonlinear systems through HJBE and Lyapunov theorem. The second contribution is an optimal feedback controller for the nonlinear controlled affine systems based on a novel rapid exponential Lyapunov function with performance functional. In addition, a nonlinear controlled affine system illustrates and verifies the proposed methodology. Last, the researches on the aforementioned problems for the spacecraft model with one axis of symmetry and 2-degree-of-freedom manipulator via HJBE and Lyapunov theorem are scarce. Therefore, it motivates our work in this study.
Notations and definitions
To develop the results in this context, it is necessary to review the notations and definitions for rapid exponential stabilization of nonlinear systems.
Consider the following nonlinear systems

where
Definition 1 (The solution of nonlinear systems)
A continuously differentiable function
Definition 2 (Rapidly exponential stable for nonlinear systems)
Consider nonlinear system (1), the zero solution

such that the corresponding solution

where
Definition 3 (The continuous-time part of hybrid systems)
For the nonlinear system (1), a continuously differentiable function

and satisfy


According to Definitions 1–3, the sufficient conditions will be proposed for rapid exponential stability of nonlinear system (1).
Theorem 1
Consider nonlinear system

with performance functional

Moreover, given that there exists a continuously differentiable function




where

Proof
Due to Definitions 1–3 and the assumptions, let

Consequently, it follows from equation (7) that

Hence, combining equations (5), (6), and (10), it can be seen that

the following inequalities can be computed as follows

that is

Therefore,
Moreover, the following equation can be obtained as

and based on equation (8), the following equation can be described as
Integrating two sides of the above equation over the interval

Noting that
A new rapid exponential stability for controlled nonlinear system
The objective of this subsection is to address sufficient conditions for establishing a novel rapid exponential stability for a controlled nonlinear system. Furthermore, combined HJBE and rapid exponential Lyapunov function, the sufficient conditions of optimality are proposed for controlled nonlinear system (11).
Considering the following controlled nonlinear system

where, for all

The schematic diagram for closed-loop controlled nonlinear systems.
Definition 4
Consider the controlled nonlinear system (11), the feedback controller

Theorem 2
Consider the controlled nonlinear system (11) with the following performance functional

where





where

Proof
According to Definition 4 and the assumptions, let

therefore, it follows from equation (17), the following inequality can be described as

Hence

Based on condition (16), the following inequalities can be obtained as

then

Thereby

The fact that
In addition, given

It follows from equation (18) that it is easy to compute the following equation and can be generalized as follows

Now, integrating equation (19) over the interval

Noting equation (15) and assuming

Therefore

The conclusion is true.
Definition 5
The set of rapidly exponential stabilizing controllers

Theorem 3
Consider the controlled nonlinear system (11) with performance functional

Moreover, assume that there exists a continuous differential function






Furthermore, if the initial state

Proof
To prove equation (28), let

therefore
Integrating equation (29) over the interval

According to equation (27) and Theorem 2

Therefore,
Remark
If
A rapid exponential stability for controlled nonlinear affine system
Motivated by section “A new rapid exponential stability for controlled nonlinear system,” we return to controlled nonlinear affine systems. Analogous to the case of controlled nonlinear systems in equation (11), we will specialize the results of section “A new rapid exponential stability for controlled nonlinear system” to the following controlled nonlinear affine system (30). The principal objective of this section is to develop the sufficient conditions of the rapid exponential stability for a controlled nonlinear affine system.
On one hand, considering the following controlled nonlinear affine system

where for all

Denoting the right hand of the function (30) as follows

where
On the other hand, the performance functional of controlled nonlinear system is as follows

To obtain the rapid exponential stability of controlled nonlinear affine system, the following assumptions and definitions will be adopted in this subsection. Given

Theorem 4
Consider the controlled nonlinear affine system (30) with performance integrands as follows

Moreover, assume that there exists a continuously differentiable, radially unbounded function



where

and

and

Furthermore, with the optimal feedback controller of this subsection

the zero solution of controlled nonlinear affine system (30) is globally rapidly exponential stable. Moreover

Finally, if the initial state

Proof
According to the assumptions in this article, let
Due to the above inequality, the following inequality can be directly computed as follows

According to equation (35), the following inequality can be generalized as follows

then

Therefore, the zero solution of controlled nonlinear affine system is rapidly exponentially stable.
Let

it follows from equation (37) that

Now, integrating equation (40) over the interval

Therefore

Furthermore, since

Finally

where
Simulations
In this subsection, some numerical results are investigated and analyzed through a spacecraft with one axis of symmetry model1,19 and 2-degree-of-freedom manipulator. 26 The simulation results report that the optimal feedback controller which is feasible and effective for nonlinear system.
The spacecraft with one axis of symmetry model
The model of spacecraft with one axis of symmetry is as follows

where

Let

that is

where

then

Therefore, according to the rapid exponential stable conditions of this article, it can be concluded that the zero solution of spacecraft system with one axis of symmetry (41) is rapidly exponentially stable.
To achieve numerical experiments, the parameters of principal moments of inertia and angular velocity are selected as follows

and

In this subsection, the trajectories versus time with parameter
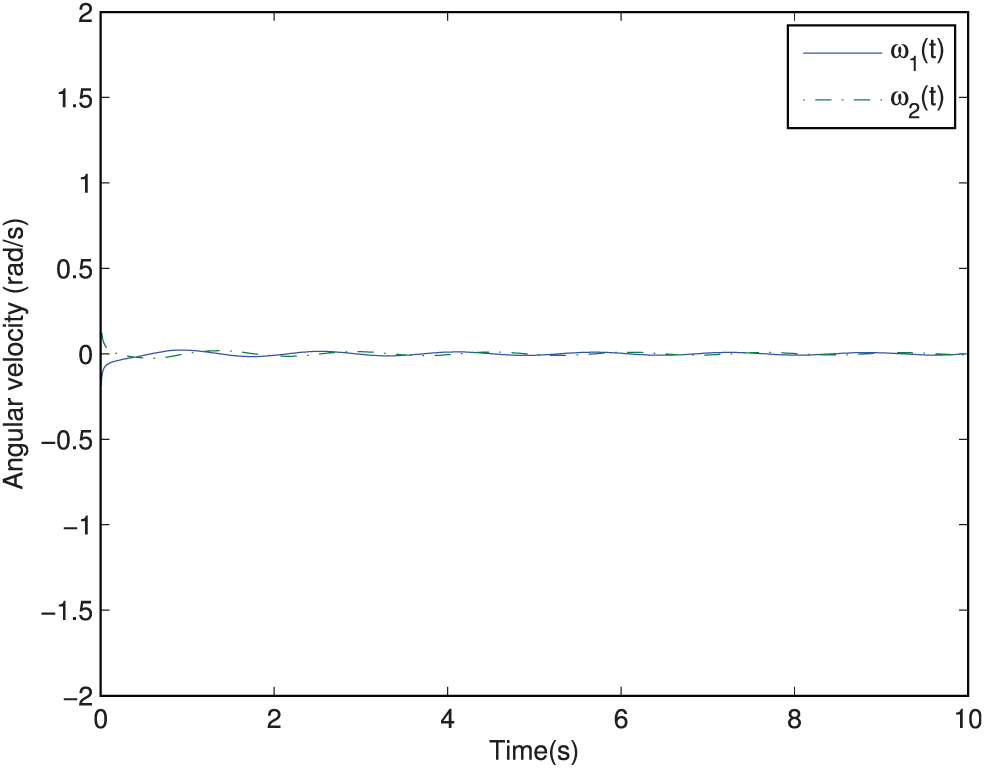
The trajectories versus time with parameter
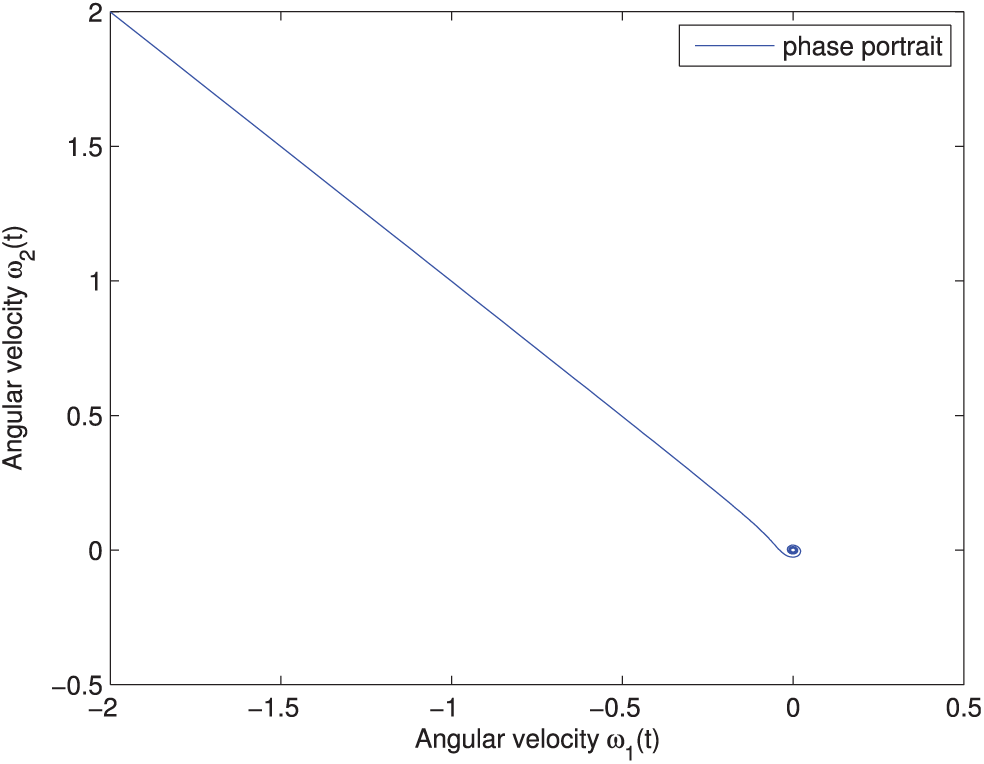
The phase portrait with parameter

The trajectories versus time with parameter

The phase portrait with parameter

The trajectories versus time with finite-time controller. 19

The phase portrait with finite-time controller. 19
Furthermore, considering the large-scale disturbance problem of initial point as follows. In this context, according to the requirements of numerical experiments, the following parameters can be chosen as

Figures 8 and 9 represent the closed-loop system trajectories and phase portraits by the rapid exponential stable controller. As shown in Figures 8 and 9, it is easy to say that the system is exponentially stable in 1 s. Moreover, the parameter

The trajectories versus time with parameter

The phase portrait with parameter

The trajectories versus time with finite-time controller. 19

The phase portrait with finite-time controller. 19
Two-degree-of-freedom manipulator
The model of 2-degree-of-freedom manipulator is as follows

where

Therefore, the simulation results of rapidly exponentially stabilizing controller and iterative learning controller for solving time-varying 2-degree-of-freedom manipulator of equation (42) are shown in Figures 12–14.

The trajectories of 2-degree-of-freedom manipulator: (a) trajectory q1 versus time t and (b) trajectory q2 versus time t.

The trajectories of 2-degree-of-freedom manipulator: 26 (a) trajectory q1 versus time t and (b) trajectory q2 versus time t.

Performance comparisons of this article and the literature 26 for soling time-varying 2-degree-of-freedom manipulator: (a, c) error q1 versus time t and (b, d) error q2 versus time t.
As shown in Figure 12, the desired trajectories are dashed blue lines and the actual trajectories are dotted red lines. It is can be seen that the proposed approach of this article is feasible and effective. Moreover, simulation results showed that the rapidly exponentially stabilizing controller achieves the trajectory tracking for 2-degree-of-freedom manipulator system. Figure 13 shows the trajectories of 2-degree-of-freedom manipulator system versus time
Conclusion and future works
This article developed some simple sufficient conditions for a class of optimal feedback controllers that rapidly and exponentially stabilize trajectories in nonlinear systems. According to the Lyapunov theorem, the rapid exponential stability was proposed, analyzed, and investigated for the nonlinear systems. Furthermore, the HJBE was utilized to achieve optimal feedback control for nonlinear affine systems. Moreover, numerical simulations have demonstrated that this optimal feedback control method could be very useful in real time. In the future works, the developed unified framework may be extended to address optimal feedback controllers and rapid exponential stability for nonlinear hybrid systems and nonlinear stochastic systems, for instance, bipedal walking robot systems and stochastic systems. In addition, the proposed sufficient conditions of this article may open a door to the performance improvement of the related applications, such as non-triangular stochastic nonlinear systems, 22 switched stochastic nonlinear systems, 25 robot control,26,29,30 and path planning, 28 with great capacity in accelerating convergence and computing accuracy.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers and the Technical Editor for their valuable comments and suggestions on revising this paper.
Handling Editor: Anand Thite
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported in part by the National Natural Science Foundation of China under grants 61773075, 61374051, and 61873304; also in part by the Key Science and Technology Projects of Jilin province, China, grant nos 20190302025GX, 20170204067GX, and 20180201105GX; and in part by the Industrial Innovation Special Funds Project of Jilin Province, China, grant no. 2018C038-2.