
Abstract
The plasticity models in finite element codes are often not able to describe the cyclic plasticity phenomena satisfactorily. Developing a user-defined material model is a demanding process, challenging especially for industry. Open-source Code_Aster is a rapidly expanding and evolving software, capable of overcoming the above-mentioned problem with material model implementation. In this article, Chaboche-type material model with kinematic hardening evolution rules and non-proportional as well as strain memory effects was studied through the calibration of the aluminium alloy 2024-T351. The sensitivity analysis was performed prior to the model calibration to find out whether all the material model parameters were important. The utilization of built-in routines allows the calibration of material constants without the necessity to write the optimization scripts, which is time consuming. Obtaining the parameters using the built-in routines is therefore easier and allows using the advanced modelling for practical use. Three sets of material model parameters were obtained using the built-in routines and results were compared to experiments. Quality of the calibration was highlighted and drawbacks were described. Usage of material model implemented in Code_Aster provided good simulations in a relatively simple way through the use of an advanced cyclic plasticity model via built-in auxiliary functions.
Keywords
Introduction
Material points in the structure undergo various types of loadings. The monotonic loading occurs mostly in the manufacturing processes or accidents, but it is rather exceptional when compared to the repeated (cyclic) one, which can be regarded as the most frequent in operating conditions. It is crucial to be aware of the loading nature, especially in the cases where the hazard to human safety is imminent. Examples of structures with such scenarios include transportation (automotive, aircraft, marine or railway), power production (hydro or nuclear) and many others.
The cyclic loading is often not just uniaxial, which has been covered very well in the literature,1,2 but multiaxial and, moreover, non-proportional. 3 The commercial software such as ANSYS or Abaqus supports some advanced plasticity models with limited potential for customization. There is definitely an option for implementing a user material definition to the commercial codes, but this is still rather expensive and time-consuming. The alternative way is to use an open-source programme such as Code_Aster developed by EDF’s R&D, which provides the possibility of using the advanced models of cyclic plasticity. 4 It is distributed as a free software under the terms of the GNU General Public Licence, so users can easily contribute to the programme development. The code has its limitations, but it has been rapidly developed in the recent years. The user base has been growing, which has been accompanied along with a better support across the community. The software offers a solution to the problems of solid mechanics, thermomechanics and associated phenomena with a support of C and Python programming languages. The service developed by EDF is used, for example, by Bureau Veritas, French Alternative Energies, Atomic Energy Commission or PRINCIPIA. 5
In the area of cyclic plasticity, Chaboche et al. 6 presented a basic non-linear combined hardening law-based constitutive model. It is composed of the superimposed kinematic hardening rules proposed by Armstrong and Frederick 7 and Voce 8 based on isotropic hardening model, which was improved in order to account for the strain memory effect. Burlet and Cailletaud 9 modified the dynamic recovery term to become the radial evanescence term in the model proposed by Armstrong and Frederick. 7 Chaboche 10 later proposed the modification of the kinematic hardening in order to improve the ratcheting behaviour. Bari and Hassan 11 introduced a new parameter in order to obtain better results in the ratcheting simulations of multiaxial loading. A parameter accounting for the non-proportionality was introduced by Benallal and Marquis. 12 It was incorporated into the isotropic hardening. Tanaka 13 introduced the fourth-order tensor, which described the slow growth of the internal dislocation structure induced by the plastic deformation, which served as the definition of another non-proportionality parameter. Hassan et al. 14 proposed to incorporate the influence of non-proportional loading on the ratcheting responses through the kinematic hardening-related parameters. Krishna et al. 15 suggested introducing the dependence of the kinematic hardening and multiaxial parameter on the hardening variable – the plastic strain surface – when the material is dependent on the loading amplitude and does not exhibit the behaviour described by Masing. 16
The isotropic hardening was modified in order to incorporate the influence of non-proportionality as well as softening, which allows starting with the monotonic yield surface and subsequently reduce its size quickly. This is necessary because the yield stress under the monotonic loading is usually larger than that under the cyclic one. Then, the yield surface size and curve shape evolution from monotonic to the first reversal can be accommodated. Finally, the model should be calibrated using three amplitudes at least. First, it is the amplitude where the cyclic stress–strain curve starts to deviate from the monotonic one, next the amplitude where the two curves become equidistant and last, some amplitude (or more) between the latter two.
Khutia el al. 17 presented the dependency of kinematic hardening parameters on the plastic strain surface within the model proposed by Ohno and Wang,18,19 which presents another alternative to the approach developed by Chaboche et al. 6 Abdel-Karim 20 modified the model proposed by Ohno and Wang18,19 by introducing the radial evanescence term into the model as presented by Burlet and Cailletaud 9 earlier. Another modification to the model was made by Abdel-Karim 21 in order to incorporate the isotropic hardening associated with the kinematic one in the constitutive equations, where the activation of respective hardening was governed by a specific parameter. Meggiolaro et al. 22 introduced new integral estimates for the non-proportionality factor of periodic loadings using the concept of Tanaka. 13 Later, Meggiolaro et al.23,24 presented a unified approach to the modelling of non-linear kinematic hardening represented in the five-dimensional space for applications to the mean stress relaxation and multiaxial ratcheting, which can also reproduce the multi-surface approach proposed by Mróz, 25 where the plastic modulus calculation is not coupled to the kinematic hardening rule through the consistency condition as in the previous cases, but it still might be indirectly influenced. Hence, the so-called uncoupled model.
The number of material constants increases with the complexity of the model, which can provide a versatile and flexible tool. However, this can lead to enormous number of parameters with unclear physical interpretation, which is rather a mathematical exercise of fitting. Therefore, the sensitivity analysis is important for the minimization of the number of parameters, which are used in the subsequent optimization task. In the end, more robust analysis can be conducted. So, the main goal is to address the experts and designers from the mechanical engineering field to carry out the analyses using the advanced constitutive models, which provide enhancements in the reliability and safety of the structures.
Experiments
The whole experimental programme was conducted on the aluminium alloy 2024-T351. Experiments and results were taken from the study of Peč et al. 26 Here, only the crucial ones needed for the model parameter calibration are summarized. The examined alloy does not exhibit the behaviour according to Masing. 16 The strain-controlled testing on three different amplitude levels was conducted on cylindrical specimens (Figure 1(f)). The first, mid-life (half number of cycles to failure) and last hysteresis loops before failure are depicted in Figure 1(a) for the experiment with 0.8% total strain amplitude for better clarity. Figure 1(b) and (c) represent the loading histories for the strain-controlled testing under 1.5% and 2.5% total strain amplitudes, respectively. These responses were developed to obtain an idea of the effect of loading amplitude and cycle number on the shape of hysteresis loop. The stress-controlled testing was performed with 410 MPa stress amplitude and 20 MPa mean stress. The same specimen as in the case of strain-controlled loading was used (Figure 1(f)). The first, mid-life and last loops before the failure are depicted in Figure 1(d) to show clearly the phenomenon of ratcheting and corresponding hysteresis loop evolution. The three-step experiment was carried out to map the non-proportionality under the strain-controlled regime of 0.7% total strain amplitude (Figure 1(e)). The tubular specimen (Figure 1(g)) was axially loaded in the first and third steps. The second step consisted of the circular loading path in the normal and shear strain space. 13

Experiment: (a) strain-controlled test with 0.8% total strain amplitude; (b) strain-controlled test with 1.5% total strain amplitude; (c) strain-controlled test with 2.5% total strain amplitude; (d) stress-controlled ratcheting test with 410 MPa stress amplitude and 20 MPa mean stress; (e) three-step (tension, tension-torsion, tension) non-proportional experiment under 0.7% total strain amplitude; (f) cylindrical specimen; and (g) tubular specimen (dimensions in mm).
Modelling methods
Finite element analysis
The simulations were carried out by means of the finite element method using the freely available software Code_Aster. 4 Internally implemented macro SIMU_POINT_MAT simulates the mechanical behaviour of one element or just one integration point in the quasi-static loading conditions. All material models with non-linear behaviour are implemented and ready to use. The reason why to use this macro to the simulation of a point response instead of the whole material sample (whole testing specimen) is the simplicity and efficiency (algorithm speed). The user can calculate and evaluate by this macro all the tensor variables presented in the selected model depending on time. No geometry or mesh is needed. This is why the boundary conditions are limited to the strain, stress and gradient tensors. User can specify the individual tensor elements in time to simulate responses under a loading history. All other options are the same as for the standard analysis. Stresses and strains are stored in a table along with all the model internal variables as a function of time.
The loading conditions were replicated from experiments, where the total axial strain or stress was used as a function of time. These conditions allowed us to precisely simulate the loading history and required results could be easily extracted by specifying the desired timestamps.
The material was modelled using the operator DEFI_MATERIALU, which has a composition depending on the desired behaviour. The aluminium alloy 2024-T351 was modelled as a combination of the constant linear elastic characteristics given by a keyword ELAS and the constant non-linear characteristics described by keywords CIN2_CHAB (combination of the two non-linear evolution rules proposed by Armstrong and Frederick 7 ), CIN2_NRAD (contribution of the non-proportionality effects) and MEMO_ECRO (association of some parameters with the strain memory effect depending on the work hardening).
The rate-independent elastic–plastic material model implemented in Code_Aster
4
includes the associated flow rule, small strain theory and isothermal conditions. The additive law for the total strain is defined as a sum of elastic and plastic strains,

where underline denotes the tensor quantity. Hooke’s law describes the linear elasticity for stress as

where
The yield function is formulated as

where

The incremental plastic strain tensor (numerical form of an associated flow rule) is written as

where
The yield stress evolution is given by the expression including the initial yield stress

The isotropic hardening evolution is then formulated as

and

where b is the stabilization rate of R, Q is the saturated value of isotropic hardening dependent on the maximum plastic strain,
The strain memory effect is included in order to account for the strain range dependency as

where

where

where

The kinematic hardening consists of the two superimposed non-linear evolution rules proposed by Armstrong and Frederick 7

where i is the number of particular evolution rule

where C and

where

where
A specific functionality of each parameter is summarized in Table 1 together with particular necessary experiment for the parameter determination.
Functionality of specific parameters.

Sensitivity analysis
Most models for simulations are complex with many parameters, state variables and non-linear relations. Those models have many degrees of freedom and are able to produce almost any desired result with some effort. 28 This is the reason of cynical opinion about the models. 29 The importance of the input parameters with respect to the model output needs to be quantified for this reason. Global, quantitative and model-free (independent of model assumptions) sensitivity analysis needs to be performed to evaluate the robustness and parameter’s importance. Moreover, it was noted that the theoretical methods are sufficiently advanced, so that it is intellectually dishonest to perform the modelling without the sensitivity analysis. 30
MATLAB Statistics and Machine Learning Toolbox supports variety of methods to define the parameter importance such as the correlation and partial correlation in various forms. Pearson’s correlation coefficient is a linearity measure between the parameter and the output. It takes value from −1 to 1, where −1 and 1 mean the linear relationship (indirect and direct correlation, respectively) and 0 means no dependency. Partial correlation coefficient is similar to the previous one with an exception that effects of other parameters are cancelled. 31
Python SALib (Sensitivity Analysis Library) package is an open-source library for the sensitivity analysis with the methods of Sobol’, Morris and others. The sensitivity of each input is represented by a numeric value for the Sobol’ sensitivity analysis, which is called the sensitivity index. It comes in several forms:
The first-order index S1 measures the output variance caused by a single parameter. Higher value means higher dependence of output on a certain parameter.
The second-order index S2 measures the output variance caused by the interaction of two parameters. Strong interactions between the parameters can be found if indices are subtracted from each other.
The total-order index ST is the sum of all previous indices. There is a possibility of higher-order index interactions if the total-order indices are much larger than the first-order one. 32
The method of Morris allows classifying the inputs into three groups: inputs having negligible effects, inputs having large linear effects without interactions and inputs having large non-linear and/or interaction effects:31,33
Determination of parameters
MACR_RECAL macro forms a relationship between the Code_Aster simulation results from SIMU_POINT_MAT (and others of course) and experimental (user-defined) data. The macro was used to determine the material model parameters to describe the experimental data sufficiently in this case.
The user has to define N number of experimental curves (tensile branches from loops), P number of parameters with defined ranges and initial values and N number of simulated curves (in tables). Experimental data and optimization settings with definitions of parameters are defined in the master file and simulations are executed in the slave file, which is called by the master file as shown in Figure 2. It is an iterative process, where the master file creates parameters based on the previous results.
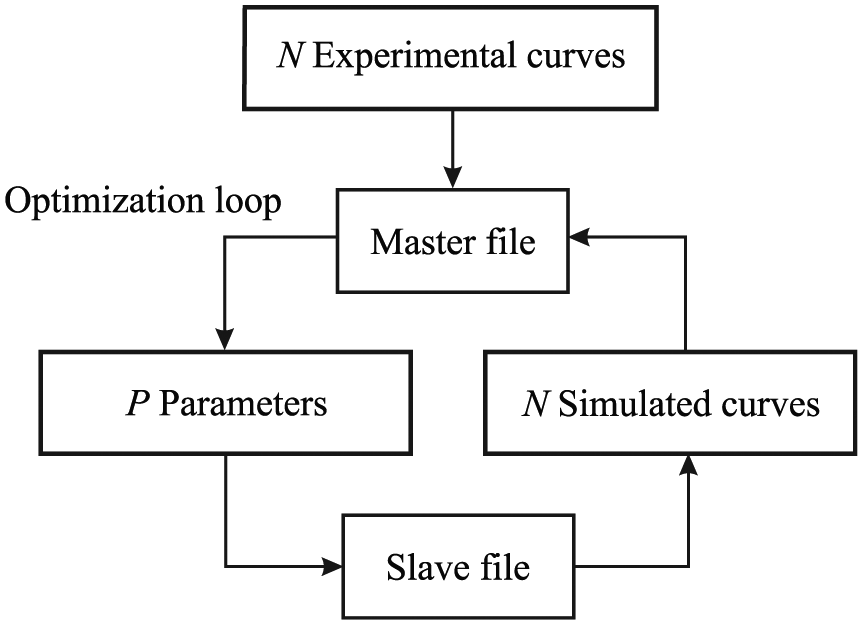
General MARC_RECAL flow chart. 4
The initial guess of parameters was done by a standard technique described in many works.6,15 It consisted of approximate identification of
Different optimization techniques can be chosen in optimization settings such as Levenberg–Marquardt algorithm, genetic, hybrid and others. Levenberg–Marquardt algorithm is based on the gradients and because of that, it is not suitable for finding a global minimum for highly non-linear models. The genetic algorithm stands for the evolutionary algorithms and the hybrid one is a combination of Levenberg–Marquardt and genetic algorithms, where the parameter space is searched roughly by a genetic algorithm and then analysed by a gradient method.
Evolutionary algorithms are the special type of computing method inspired by the process of natural evolution. The main idea of all evolutionary algorithms is the same: environmental pressure is applied to a given population causing a rise of the population fitness. Based on the fitness, suitable candidates are chosen to seed the next generation by applying the recombination and/or mutation to them. This leads to a set of new candidates (the offspring), which competes based on their fitness with the old ones for a place in the next generation. This process of creating new generations and selecting the candidates is the iterative process until a feasible and sufficient solution is found or some limit is reached. The general schema of evolutionary algorithm is show in Figure 3.

Evolutionary algorithm flow chart. 35
Results and discussions
Two different simulations were done in order to obtain the final results and give a good perspective on the issues raised. The first simulation excluded the stress-controlled loading from the optimization process, while the second one included it. The separate stress-controlled loading simulation was performed and no convergence was obtained after finishing the first simulation, which excluded the stress-controlled loading alone. The process of model calibration was carried out in three steps. First, separated simulations with a full model were fine-tuned and exceptions were created to prevent the failure of the file execution. Second, the design points of all the model parameters were created and simulated using the routine from the first step and the sensitivity analysis was performed. And finally, important parameters (all parameters in the end – see the following subsections) were selected according to the sensitivity analysis and the model calibration was completed.
The weighted sum of squared residuals was used to obtain the single quantity since the multiple simulations were carried out under different loading conditions and only a single objective optimization was available. The strain loading was weighted by the following values:

where n is the number of either division of tensile branches or tensile stress peaks, and

Sensitivity analysis results
This subsection shows the results of sensitivity analysis under two conditions. The sensitivity was evaluated separately under the strain- and stress-controlled loading in order to separate the effects of individual parameters. However, it is important to have an idea of overall model behaviour. Particular attention must be paid to all parameters and their meaning must be clearly known. Their importance will be discussed later after the evaluation of the stress-controlled loading sensitivity.
Strain-controlled tests
Methods of Sobol’ and Morris showed that all parameters had influence on outputs, but Pearson’s and partial correlation methods revealed no influence of

Pearson’s and partial correlation coefficients for the strain-controlled loading.
The evaluation of S1 index showed that the output was almost identically dependent on the variance of single parameter (Figure 5). However, it showed high level of non-linearity and/or parameter interactions since ST and S1 difference was high.

Sobol’ sensitivity coefficients for the strain-controlled loading.
Morris method showed that all parameters were important for the model simulation as it can be seen in Figure 6.

Morris coefficients for the strain-controlled loading.
Stress-controlled tests
Sobol’ method showed that all parameters had influence on outputs, but Pearson’s and partial correlation methods showed almost zero influence of

Stress-controlled loading: (a) Pearson’s and partial correlation coefficients; (b) Sobol’ sensitivity coefficients.
Influence of parameters
Multiaxial tests
Last parameters associated with the multiaxial loading are

Graphical evaluation of sensitivity for multiaxial loading.
Finite element analysis results
The elastic constants were represented by Young’s modulus of 72,500 MPa with Poisson’s ratio of 0.34. 26
One great advantage of the presented model is its independent calibration for the uniaxial and multiaxial loadings. The uniaxial loading was calibrated until the results were satisfactory in the first step and then only multiaxial parameters (
Uniaxial loading
Many simulations were run, from which the three best simulations are presented.
The following weighting functions were used in the case of first parameter set (Table 2):
Weights of 0.1, 0.3 and 0.1 were used for the tensile branches of hysteresis loops of 0.8%, 1.5% and 2.5% total strain amplitudes, respectively. The weight values were estimated by the trial-and-error method. Therefore, many simulations were demanded.
Weight of 1.0 was used for the peak stress evolution in each cycle for the total strain amplitude of 1.5%. Therefore, the best match should be reached for the stress evolution in the middle of the studied amplitude range.
The stress-controlled loading was not considered in the calibration.
Three sets of calibrated parameters (each set calibrated under different conditions).

The following was used for the second and third sets of parameters (Table 2):
Weights of 1.0 were used for all target functions so that there was an equal influence of each error.
Three different tensile branches of hysteresis loops were considered.
The stress-controlled testing was included as well.
Various results were obtained due to either omitting or considering the stress-controlled loading. The tensile branch of hysteresis loop for the total strain amplitude of 1.5% and the stress evolution reached the best match for the first parameter set in Table 2 (Figure 9). The results are scattered for the second and third sets of parameters (Table 2) due to high non-linearity, where the solution has several local extremes, which might only slightly differ from the global minimum (Figure 10).
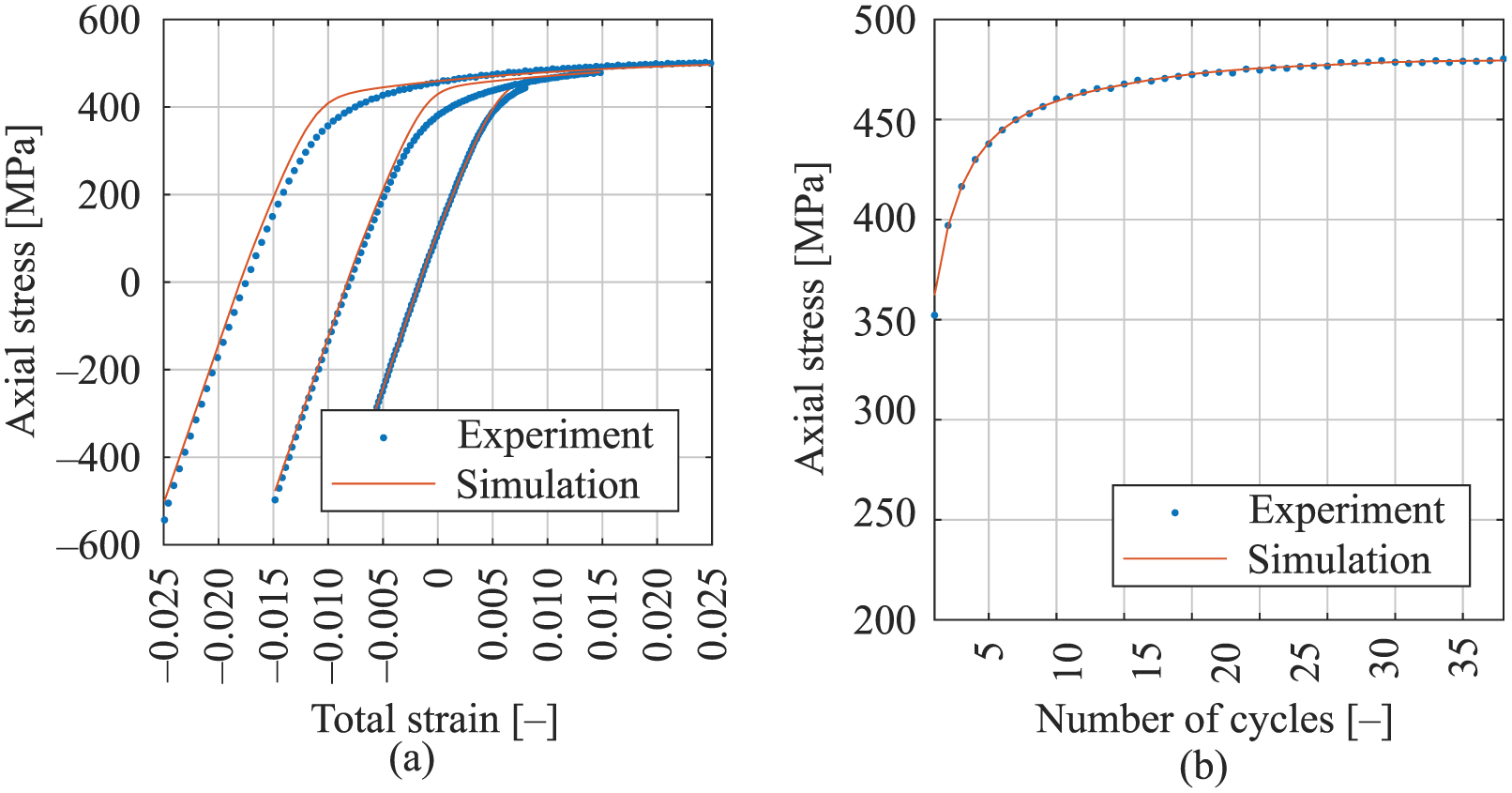
Simulation results for first parameter set when calibrated using the strain loading paths only (no convergence for the stress-controlled loading): (a) tensile branches and (b) peak stresses.

Simulation results when calibrated using both the strain and the stress loading paths: (a) tensile branches, (b) peak stresses, (c) peak strains, (d) tensile branches, (e) peak stresses and (f) peak strains.
Results in Figure 9 show a great correlation with the experimental data. All the three strain amplitude experiments were well described by the minimum and maximum values, while the shape of the curves was described relatively well, except for the knee area which is a drawback of using only two backstresses. The evolution of stress peaks matched perfectly both the experimental shape and values when the cycles progressed. The disadvantage of this set of parameters is that they cannot simulate the stress-controlled loading.
All the loading conditions can be simulated when the stress-controlled loading was included in the optimization process, but at the cost of deterioration of some simulations. As one can see from the simulations of tensile branches of saturated loops of strain-controlled loading in Figure 10(a) and (d), the results are almost identical when compared to each other. However, the pairs of Figures 10(b)–(e) and Figures 10(c)–(f) differ significantly. The set of parameters must be selected depending on the type of analysis performed on the structural (component) level because this is only a material-level calculation presented here.
Multiaxial loading
The initial parameters for the multiaxial loading were roughly obtained by the LHS method.
40
The final set of parameters was found using the trial-and-error method, where the small changes in the parameters were made, while the changes in errors were controlled. The same parameter set was obtained using this approach for all the three sets of uniaxial parameters:
Results for no non-proportional effects are depicted in Figure 11(a), (c) and (e), where the prediction of response is poor. It was better with accounting for the non-proportionality (Figure 11(b), (d), (f)). It should be noted that this improvement was basically achieved by the parameter
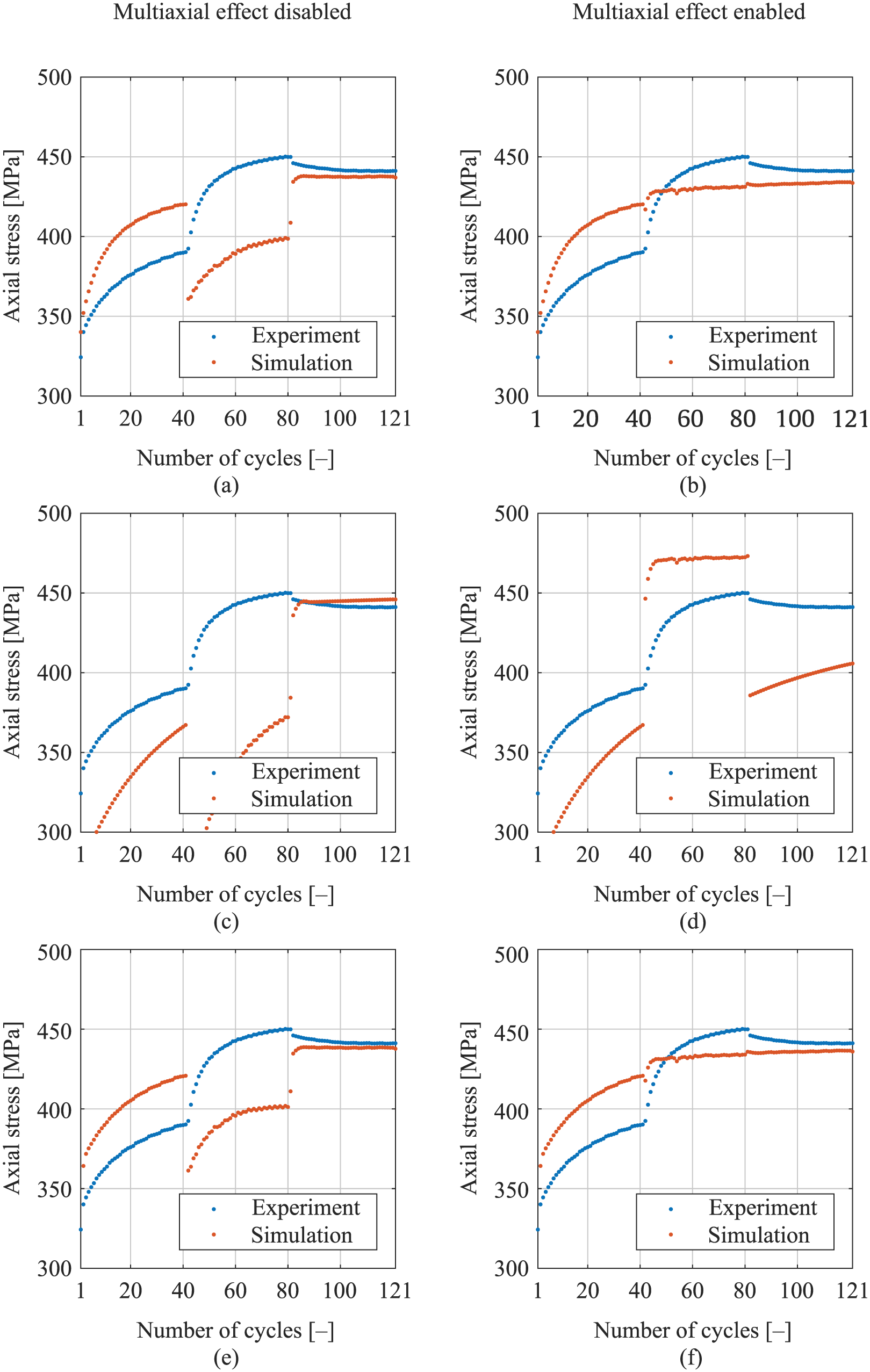
Axial stress against number of cycles for the multiaxial tests when multiaxial parameters were kept the same but only the following set of parameters was used: (a, b) first, (c, d) second and (e, f) third.
A good match was not received for the uniaxial loading (parts I and III of the three-step experiment) because it was not achieved for the solely uniaxial loadings as well (Figure 10) due to the calibration for a wide range of strains. The best match would be achieved for the total strain amplitudes around 1.5%, while the three-step experiment was performed under the total strain amplitude of 0.7%, which is approximately twice smaller.
Conclusion
Code_Aster allows calibrating the advanced cyclic plasticity models simply using the built-in routines. Advanced plasticity models are included in Code_Aster, which enables to account for the strain amplitude magnitude as well as loading non-proportionality. The disadvantage of this open-source code lies in the availability of only two backstresses. This restriction prevents from better capturing of saturated loop shapes, which could be achieved by three or four superimposed backstress terms.10,41 Nevertheless, it is possible to add more backstresses or create a completely new model since the Code_Aster can be modified. The study demonstrates that with a selected constitutive model, it is crucial to choose a suitable target function according to the intended utilization.
Three sets of parameters were presented. Each set was calibrated under different conditions. The third set of parameters was strongly influenced by the ratcheting parameters; therefore, the simulations with the earlier two sets of parameters were not of acceptable quality regarding the hysteresis loops as well as stress evolution. The third set of parameters provided the best simulations. The trend was excellent although there was a shift for the stress-controlled simulations primarily due to the monotonic response simulation. However, the evolution of peak stress amplitudes under the uniaxial loading was captured well.
In the case of a real component, it would be needed to analyse the operating strain range in service along with the analysis of the multiaxial stress states. More precise calibration can be performed in such a case.
Footnotes
Handling Editor: Daxu Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work is an output of project NETME CENTRE PLUS (LO1202) created with financial support from the Ministry of Education, Youth and Sports under the ‘National Sustainability Programme I’.