
Abstract
To reduce the time of aircraft passenger evacuation in an unplanned emergency and improve passenger safety, this article proposed a dynamic estimation method of an aircraft emergency evacuation process; optimal performance statistics can be estimated efficiently. Then, the emergency guiding model is established based on the cellular automata theory. In this model, multiple factors are considered, such as seat pitch, exit width, and occupant behavior. A total of six categories (target exit choice, movement direction selection, movement speed calculation, behavior representation, crew operation, and exit modeling) and 24 evacuation regulations are included. Two kinds of civil aircraft with 90 seats and 149 seats were tested individually using the proposed model and a traditional model. The total evacuation time can be reduced by more than 5%, and optimal performance statistics can be reduced by more than 30%. The results indicate that with this model, more lives can be saved in the case of an emergency.
Introduction
According to joint research by the Federal Aviation Administration of the United States, Transport Canada, and the Civil Aviation Administration of the United Kingdom, the proportion of nonfatal accidents in total accidents is increasing yearly, while death of passengers and crew members caused by accidents is decreasing. 1 The statistical result shows that most people on board an aircraft can be successfully evacuated; however, there are still some people who are killed as they cannot escape in time. 2
Once an accident happens in flight, passengers will be evacuated as guided by crew after an emergency landing. Usually, during an emergency landing, the impacts on the aircraft will cause deformation of the fuselage and result in the failure of cabin doors, or fire and fragments at the cabin doors can make them impassable. The influencing factors during the evacuation process are too complicated for existing evacuation procedures to handle, which may cause additional problems such as evacuating to wrong direction or aisle blocking.
The research on emergency evacuation is mainly focused on the following four aspects: structure layout, environmental influence, evacuation procedures, and evacuation behaviors. The questionnaire surveys, 3 evacuation experiments, 4 and model simulations are used in research. 5
Evacuation experiments are potentially dangerous for the participants, so simulations are widely applied. Many emergency evacuation models for aircraft have been developed, such as the GPSS model, 6 the MA model, 7 the OOO model, 8 the airEXODUS model,9–11 the DEM model, 12 the VacateAir model,13,14 the CAEESS model, 15 the EvacuSimulation model, 16 the SOAEE model, 17 PAXelerate model, 18 and the FGCAE model. 19
Lovreglio et al. 20 focused on behavioral uncertainty in evacuation process and demonstrated by experimental and simulation. Wu et al. 21 developed a novel evacuation model using game theory and found the optimal position of exits in rectangle room. Zhang et al. 22 developed an emergency evacuation model for an A380 aircraft considering fire and the influence of carbon monoxide. Based on a simulation, the author suggested that the crew should guide passengers on board to evacuate from the front and rear cabin doors at an optimal evacuation time. Giarola et al. 23 studied the influence of exit availability and passenger choice of exits on the total evacuation time; the result shows that passenger choice of exits has significant influence on the total evacuation time under different exit availability.
The problems existing in emergency evacuation are as follows:
To make full use of the exits and ensure evacuation efficiency, the fuselage is usually divided into several sections according to exit location. In a real evacuation procedure, the exit availability in different locations and opening time of cabin doors can influence the evacuation procedure. Therefore, the evacuation efficiency of division in advance is limited, and the division of the fuselage should be a dynamic process. There is little research on the principles and methods for the strategy of fuselage division.
Considering the specificity of passenger aircraft and the complexity of interior layouts, we cannot ignore the influence of obstacles inside the fuselage. Most existing evacuation models assume that interior layouts are stationary and leave out of random obstacles such as dining carts or cushions and carpets on the floor. Therefore, these models are unable to simulate the real evacuation process.
The emergency signal devices play an important role on the plane. Recently, some improvements have been made for the signal devices, such as installing a floor light line to indicate the evacuation direction. For better use of these devices, it is necessary to research the theory and method of layout optimization of signal devices considering the shielding effect of smoke and fire and new technology of the senses of hearing and touch.
After an aircraft successfully forces a landing, when using the evacuation procedure, it is important to handle problems such as how to inform the passengers of the available exit locations, how to arrange the passengers to properly and reasonably exit the aircraft, how to lead the passengers to the corresponding exits, how to improve the effectiveness of crews, and how to guide the passengers to evacuate in time when the crew is unavailable.
To effectively solve the problems above and shorten the evacuation time, considering the dynamic variation of exit availability, this article proposes a dynamic evaluation method for emergency evacuation based on Cellular Automata theory and builds a guiding model for the evacuation procedure in passenger aircrafts. Using cameras and voice prompt devices, the proposed model can be applied to the guiding service for emergency evacuation.
Dynamic estimation method of an aircraft emergency evacuation process
If the clearance and evacuation process of crews and pilots are ignored, the optimal evacuation result is that all final passengers evacuate simultaneously at the available exits. The Optimal Performance Statistics (OPS) parameter is used to characterize the result. OPS was proposed by the Fire Safety Engineering Group (FSEG) at Greenwich University and can be used to represent the degree of reasonable cabin layout. The value of OPS is calculated as follows

where n is the number of available exits, n ≥ 2; Tei is the last passenger evacuation time at exit i; Ttotal is the total evacuation time, that is MAX[T ei ].
According to equation (1), to minimize the value of OPS, all available exits are required to simultaneously evacuate the final passengers. Thus, it is necessary so that each exit can accommodate the number of waiting passengers in the evacuation process, and so the passengers can be guided to move toward the available exits where the number of waiting passengers is fewer. We proposed a dynamic estimation method to rapidly estimate the evacuation time required for each exit. The situation of passengers waiting for evacuation at each exit can be obtained by camera monitoring devices installed on the cabin ceiling or floor-mounted distance sensors, and then passengers can be guided in the proper direction of an exit by installing a voice prompt device in different positions of the cabin.
For example, Figure 1 shows a civil airplane layout with 149 seats. The cabin contains three coupled exits, namely, the front C-type exits L1/R1, the middle III-type exits L2/R2, and the rear C-type exits L3/R3.

A civil airplane layout with 149 seats.
Before deriving the estimation method, the cabin terminologies are defined as follows:
Fuselage station: the location of each device or equipment in the front-rear direction on aircraft, such as exit L1 and exit R1, which are the same fuselage stations.
Cabin section: the area between the two fuselage stations in a cabin, as shown in Figure 1, which can be divided into A, B, and C sections from front to rear.
Number of passengers waiting for exit: the number of passengers who have not yet evacuated from the exit they want.
Decision-making passenger: if a passenger who is the target of the current exit (set to exit 1) moves to the other exit (set to exit 2), and he meets the next passenger whose purpose is to exit in the same place (exit 2), the passenger is a decision-making passenger and may choose other exits as his purpose suits.
Path accessing: if the decision-making passenger at the current exit can evacuate to another exit or with another decision-making passenger at another exit, the path of the two exits is accessible.
Path blocking: If the decision-making passenger at the current exit cannot evacuate to another exit or with another decision-making passenger at another exit, the path of the two exits is blocked.
In the aircraft cabin evacuation process, the distribution of passengers at an instant of time is shown in Figure 2. Although there are two passengers behind decision-making passenger 2, the latter two passengers do not have an alternative path at this moment and will become the decision-making passenger when they evacuate from the seating area into the passage area. For decision-making passenger 1, exit L2/R2 is path accessing, but exit L3/R3 is path blocking. For decision-making passenger 2, exit L1/R1 is path accessing, but exit L3/R3 is path blocking. For decision-making passenger 3, exit L3/R3 is path accessing, but exit L1/R1 is path blocking.

Passenger location demonstration of a time after evacuation beginning.
After evacuation initiation, the voice prompting device is used to report the available exit states, and the camera monitoring device is used to provide feedback of the evacuation situation of cabin passengers. When all available exits are opened, the real-time dynamic estimation method is started. The method is described as follows:
The exits with the same or similar fuselage stations are set as a couple of exits. If the couple of exits are available, they are regarded as an exit, and the evacuation performance of the exit is multiplied by 2. The performance of each exit is shown in Table 1.
The number of passengers waiting for each exit and their positions are obtained to determine the decision-making passengers.
For a decision-making passenger, if the number of passengers waiting for the target exit and the number of passengers waiting for the other available exits satisfy equation (2) and the path of the two exits is accessible, the passenger will change the target exit



where Ti is the estimated time of all waiting passengers to evacuate at the exit, which is the target exit of decision-making passenger i, s; Tj is the estimated time of all waiting passengers to evacuate at the exit j, s; Li−j is the length of the path from decision-making passenger i to exit j, m; vi is the moving speed of decision-making passenger i, m/s; ε is tolerance threshold, s; Ni is the number of waiting passengers at the exit that is the target exit of decision-making passenger i; Nj is the number of waiting passengers at the exit j; ψi, ψj are the performances of the exit i, j, and if it is a couple of available exits, the performance is multiplied by 2.
Maximum seat quantity and performance of different exits type.

Emergency evacuation guiding model for aircraft
Cellular spaces
Two-dimensional cellular automation is introduced in this model due to the characteristics of the aircraft cabin, and cellular spaces are set as square grid form. Boundary conditions of cellular spaces are of constant value form. There are two cellular spaces in this model in order to simulate passenger movement inside the cabin. One cellular space is for the aircraft cabin and the other cellular space is for the passengers. Both cellular spaces have the same shape and size with different state for each cellular space. The status of both cellular spaces and their adjoining spaces are taken into account during calculation as Figure 3 shows.

Cellular space of guiding model.
Neighborhood
The aircraft cabin is a narrow space, so the Moore neighborhood is introduced to accurately simulate the local transformation during evacuation.
Cellular status
Table 2 shows all possible status for cellular types, which are divided into two types, the fixed type that does not change with time and the dynamic type that changes with time.
Cellular type and status.

Moreover, cellular spaces have addition properties to insure precise evacuation such as the exclusive exit properties as shown in Table 3.
Exit properties.

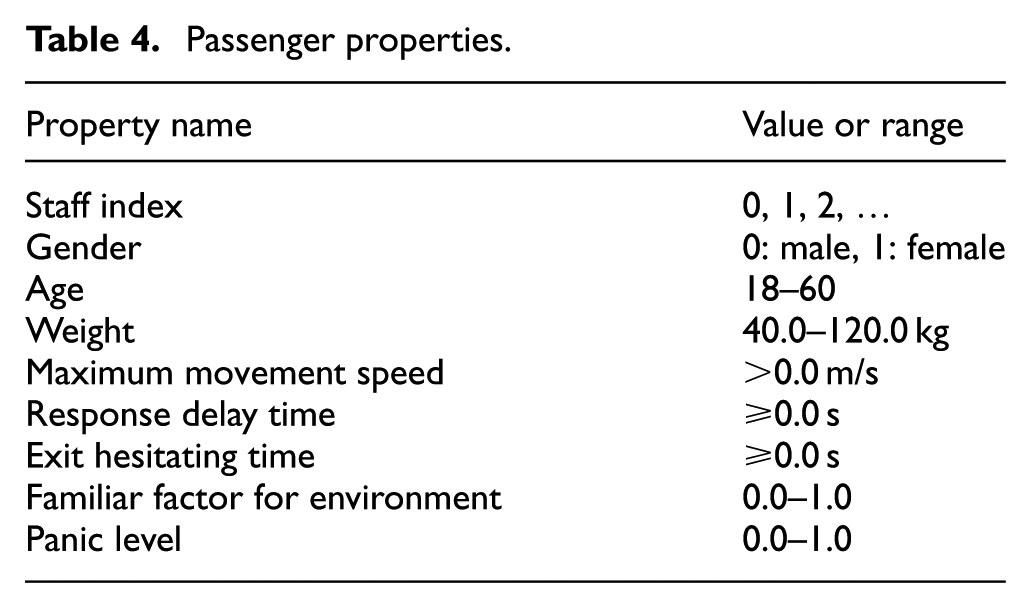
Passenger status belongs to the dynamic type whose properties are shown in Table 4.
Passenger properties.
Regulations
Regulations are the most complex part of this model whose definition will influence the accuracy of the evacuation simulation and results.
Passenger evacuation is a complicated process. There are different movement patterns according to various people including, in detail, the shortest distance pattern, the consistent in-and-out pattern, the conformity pattern, and the mixing evacuation pattern. For the shortest distance pattern, an individual passenger is supposed to be familiar with the environment such as exit location so they can choose the nearest exit to use for evacuation. The consistent in-and-out pattern applies to situations that passengers are not so familiar to the environment that they chose an exit by memory from when they boarded the plane. When passengers lose their judgment ability due to panic and they follow the multitude of other passengers to evacuate, then the conformity pattern is used.
The following assumptions are made for evacuation modeling:
Opening time of all kinds of exits is established by the time distribution of typical aircraft in an emergency evacuation airworthiness test.
All passengers take the same time to go down the evacuation slide.
Passenger behavior patterns during evacuation process could be simulated by familiar factors of the scene.
Conformity patterns are ignored in modeling.
Panic coefficients are introduced to describe the unreasonable competitive behaviors caused by intense tension facing dangers.
All passengers obey the guidance from stewards.
Property value or range data of each person from the crowd are the same no matter their home country and come from the experiment. The main factors are response delay time, hesitation time at exit, and maximum movement speed.
Disruption of light and fire are ignored.
Based on cellular space, the potential field for available exits is built to establish the regulations of the evacuation process. A physical space is illustrated in Figure 4(b); meanwhile, the potential field for available exits is in Figure 4(c). There are four kinds of objects in physical space: obstacle, obstacle that can be crossed, exit, passenger. Each object will be transformed into a cellular state according to Table 2 as 1 for obstacle, 2 for obstacle that can be crossed, 3 for exit, and 10 for passenger (passenger cellular space and cabin space are combined together for simple display). Then, the potential field is obtained, in which influencing factors such as obstacles that can be crossed are taken into account, by calculating the shortest path between each cellular space and exit according to the Dijkstra method. The value of a potential field for an obstacle that can be crossed is twice as large as for a normal one.
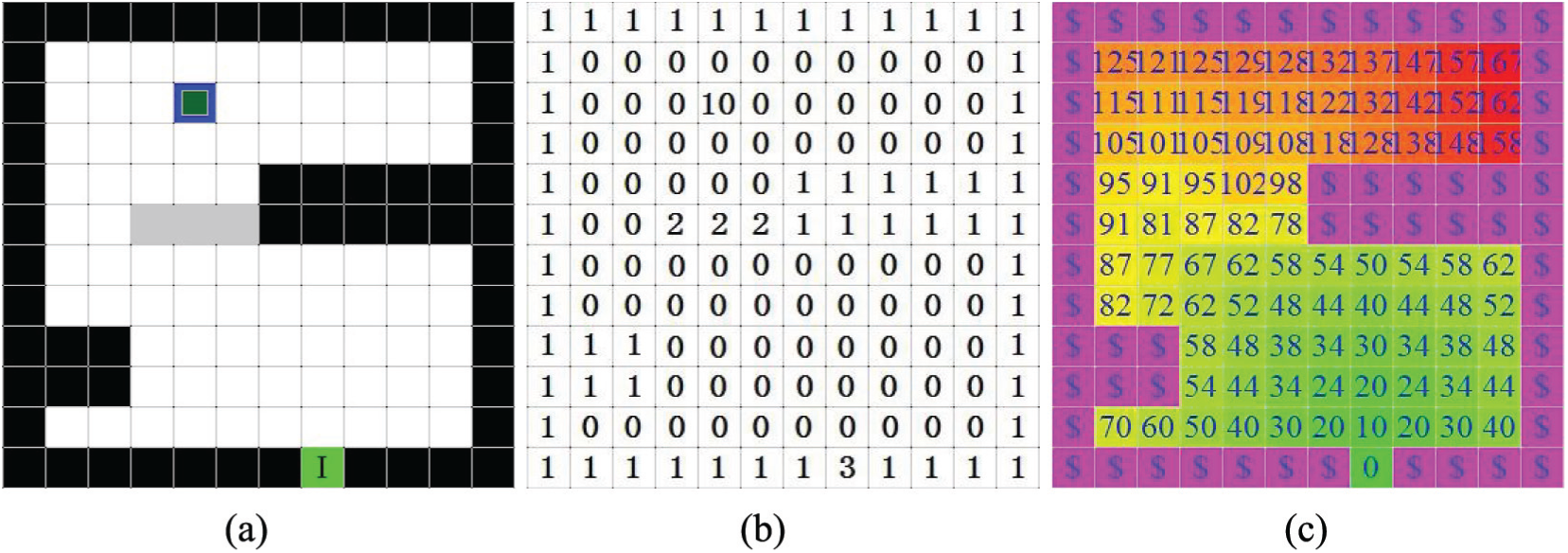
Transformation process of a physical scene: (a) Physical scene, (b) cellular space, and (c) space potential.
Regulation 1—target exit choice
Passengers will choose the nearest exit to evacuate through if a steward does not assign an exit and the availability of exits is unclear.
The random direction moving method in regulation 2 would be used if there is more than one equidistant exit.
If the nearest exit is unavailable, the next exit would be searched until an available exit is found.
Passengers will follow the specific exit if a steward has assigned which exit to use.
Regulation 2—movement direction selection
If there is a cellular space being a status of obstacle (seats, galley, lavatory, closet, and bulkhead) among the neighbors of a passenger cellular space, the cellular space is then unavailable.
All available cellular positions among the neighbors of the passenger cellular space are ordered by the potential field value of the target exit of this passenger. Cellular probability is calculated according to equation (5), which can derive the normalization probability after being normalized. If one cellular probability value exceeds 0.5, the direction of it is selected as the next movement direction of the passenger.
If the chosen cellular space has been occupied by another passenger, the passenger will wait for the next step.
If all the neighboring probability values are less than 0.5, there is no obvious direction, and the next movement direction is obtained by rouletting.
If there are several maximum probability values, the next movement direction is also obtained by rouletting.
The probability equation of movement direction selecting is

where N is the normalization factor,
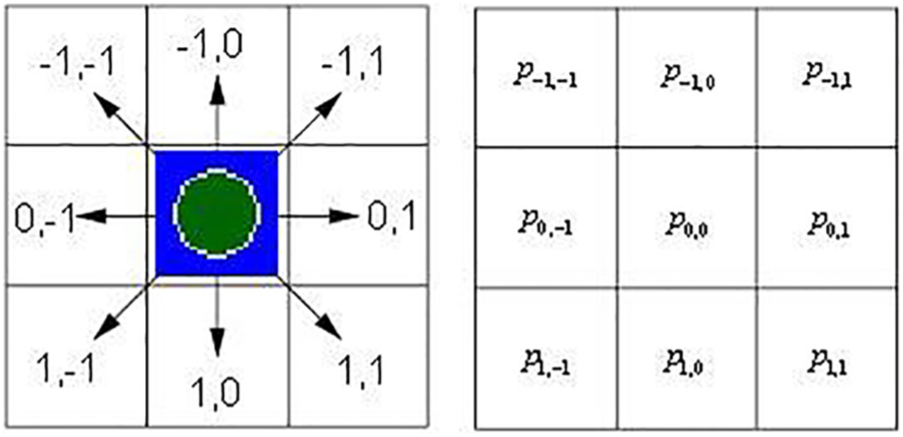
Available direction and probability of passenger movement.
Regulation 3—movement speed calculation
In the process of evacuating, passengers move as fast as they can.
An obstacle that can be crossed will impact the maximum speed of passengers.
The level of panic will impact the maximum speed of passengers.
The maximum speed of passengers is limited by gender, age, obstacle that can be crossed, panic level, and so on. The obstacle that can be crossed in the aisle (airworthiness certification of civil aircraft emergency evacuation demonstrations requests some obstacles in the aisle such as passenger belongings, cushions, and carpets) will impact the speed. Appropriate panic level can gain speed, but excessive panic can increase the competition of passengers; furthermore, a choking phenomenon (the competition caused by panic simulated by regulation 4—behavior representation) may occur and increase competition.
To simulate all of the effects caused by these factors on passenger speed, the actual speed will be computed by the following weighting method

where MAX(., .) means take the maximum value; vkmax indicates the maximum speed of passenger k; kµ and µ indicate the impact factor of panic level and the panic level, respectively; ko indicates the impact factor of an obstacle that can be crossed; and o means if there is an obstacle that can be crossed.
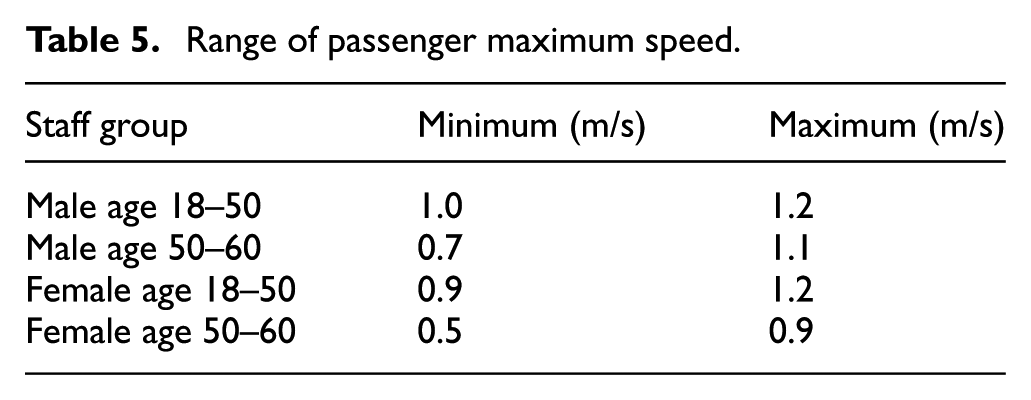
The properties of each passenger such as age and gender can impact the maximum speed vkmax. In this article, the scope of maximum speed are generated by the statistics of Galea et al., 9 which are derived from the statistical analysis about passenger movement speed in the video of existing emergency evacuation experiments (Table 5).
Range of passenger maximum speed.
Regulation 4—behavior representation
If the response delay time of a passenger has not yet been reached, the passenger will wait for the next step.
After arriving at an exit, if the passenger hesitation time has not been reached, then the passenger will wait for the next step.
If there are two or more passengers competing for one cellular position, then the method selects the most successful passenger by equal probability. On the basis of panic level, the method will generate nonsuccessful competition with certain probability, which means all the competing passengers will wait for the next step.
The range of passenger response delay time and exit hesitation time are generated by the statistics of Galea et al. 9 The position, amount, and capability of stewards will also affect passenger speed and behavior. To simulate the effectiveness of a steward, new regulations will be added.
Regulation 5—crew operation
At the beginning of evacuation, the crews check the availability of the exits and open them; if one does not work, then the crew looks for another one.
After opening the exit, the crews begin to direct the passengers to leave. The effect of a crew has a certain area, which is circular and is centered at crew position with a radius of R.
The target exit of the passenger who enters into a crew working area will be decided by the crew, as shown in Figure 6 and is calculated by equation (7).
The panic level of a passenger who enters into a crew’s working area will change. A high passenger panic level will decrease the competition for exit; a low passenger panic level will increase their speed gain, as calculated with equation (8).
After all passengers have left, the purser begins to check the airplane, and other crew members leave directly.

Crew effects on passenger exit selection.
The crew decides which exit to evacuate based on the amount of passengers waiting for the exit. If there are n available exits, the amount of passengers between passenger k and exits is m1, m2, …, mn, and the distance between passenger k and exits is L1, L2, …, Ln; then the exit is chosen for passenger k as

where Ei, … , Ej is the list of exits that have the least amount of space between passenger k and these exits; E is the exit that has the shortest distance

where µ0 indicates original panic level of the passenger; κ indicates command efficiency of the crew where 0 indicates poor command, 1 indicates medium command, and 2 indicates powerful command; ε indicates the fine tuning value, 0.1; µf indicates the panic level considering the command efficiency of the crew.
The availability of all exits is unknown before evacuation. When there is a crew member at an exit, the availability of the exit is checked by this member. If the exit is usable, then the crew member will open it; if not, then the crew member will look for another exit until finding one that is available. When there is no crew member at an exit, the first arrival passenger will check the availability of the exit and open it if available. In the evacuation process, because of aisle obstructions, fire, toxic smoke, fragments, and so on, the usable exit may become unusable; therefore, it is then the passengers at this exit who should change their target exit and find the next nearest available exit.
Regulation 6—exit modeling
Before evacuation, the status and availability of exits is unknown.
The usability of an exit is known after it is checked by the crew or the first passenger to arrive. The check time is dependent on response delay time of the crew or the first passenger and the time from initial position to exit.
When the crew or the first passenger arrives at the usable exit after a period of time (exit open time), the status of the exit becomes open.
The status of unusable exit remains closed during the evacuation process.
Updating strategy
According to experimental results of a person choosing a response time, the update steps are set as 0.5 s. Parallel updating strategy is used to implement the regulations.
Flowchart of the simulation process
The flowchart of the simulation process is shown below (Figure 7).
Step 1. Disperse the aircraft cabin is to generate cellular space.
Step 2. Calculate the static potential for available exits. Available exits are predefined before simulation but the virtual occupants on board do not know which exit can be used before evacuation.
Step 3. Calculate the total static potential from all the available exits.
Step 4. Begin simulating the evacuation process. This step includes some substeps.
Substep 4.1. Generate virtual passengers and crews according to appendix J of FAR 25; randomly generate their positions in the cabin.
Substep 4.2. Calculate the dynamic potential for all passengers and crews according to their positional relationships.
Substep 4.3. Set time step = 0.5 s and current time = 0 s; begin the simulation.
Substep 4.4. Set current time+ = 0.5 s. The following steps for crew members and passengers are parallel.
Substep 4.5(a). For each crew member, if he or she has responsible exits and have not opened them, move to the nearest responsible exit and determine if it is available. Open the exit or go to the next responsible exit.
Substep 4.5(b). If a crew member has opened an exit, instruct passengers nearby to evacuate.
Substep 4.5(c). If all passengers have left, the purser begins to check the cabin, and other crew members leave directly. Go to Step 5.
Substep 4.6(a). For all passengers, choose target exit by Regulation 1 and 5; for a decision-making passenger, estimate whether the exit needs to be changed based on the dynamic estimation method.
Substep 4.6(b). For all passengers, estimate the available direction and probability Pij by Regulation 2.
Substep 4.6(c). For all passengers, determine if they can move by Regulation 4.
Substep 4.6(d). If a passenger can move, calculate movement speed vk by Regulation 3. If not, wait.
Substep 4.7. Update the position of all the crew members and passengers. Then, go to Substep 4.4.
Step 5. Calculate and output TET, OPS, and so on.

Flowchart of the simulation process.
Comparison of simulation results between the guiding model and the traditional model
Case 1: a civilian airplane with 90 seats
Layout scheme
We first choose a civilian airplane with 90 seats, as shown in Figure 8, to validate our model. The length of the cabin is 19 m. The compartment of exit type is type-I + I. The width of exit aisle in the front of the cabin is 690 mm, and the width in the back of cabin is 610 mm. There are 18 rows of seats in the cabin (the right side has triple seats, and the left side has double seats). The pitch between rows is 780 mm, and the distance between the 16th and 17th rows is 1500 mm. There are 90 passengers, 2 flight attendants, and 2 pilots. The emergency evacuation model of the cabin is shown in Figure 9.

Ninety-seat airplane layout scheme.

Emergency evacuation model of the cabin with 90 seats.
Emergency evacuation simulation
The traditional model and guiding model are used for 1000 calculations of the evacuation simulation. Distribution of the total evacuation time is shown in Figure 10. The OPS result is shown in Figure 11.
Total evacuation time distribution of the cabin with 90 seats.

Optimal performance statistics of the cabin with 90 seats.
The simulation result shows that the total evacuation time is 62 s under that of the traditional evacuation model. Meanwhile, the total evacuation time is 55 s with the guiding model, and the time is decreased by more than 10% compared with the former model. The OPS on average is 0.1626 using the traditional evacuation model, and the OPS on average is 0.0922 using the guiding model, which is decreased by over 40%.
Case 2: a civilian airplane with 149 seats
Layout scheme
The aircraft examined in Case 2 belongs to the same family of narrow-body aircraft as the first. The compartment of exits type is type-C + III + C. The type III exit is located in the middle of the cabin. There are 25 rows of seats in the cabin. There are 149 passengers, 2 flight attendants, and 2 pilots in total. The cabin layout is shown in Figure 1. The measured evacuation time from the trial was 64.1 s with an OPS of 0.02. 10
The emergency evacuation model of the cabin is shown in Figure 12.
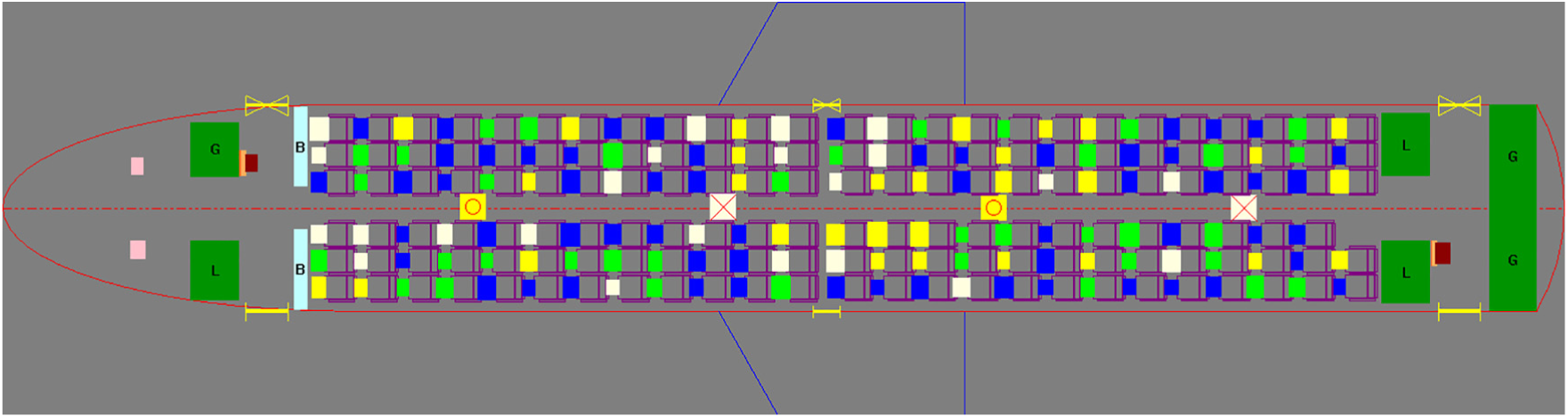
Emergency evacuation model of the cabin with 149 seats.
Emergency evacuation simulation
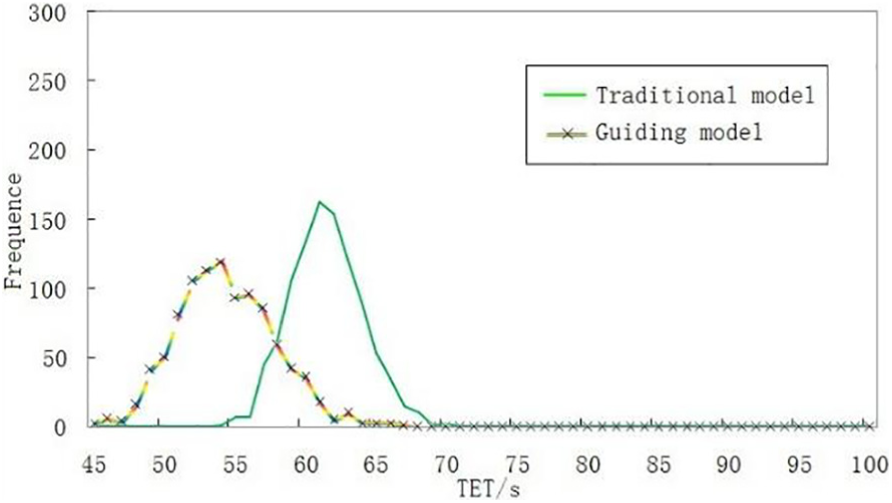
According to Galea et al., 10 the total evacuation time distribution simulated by airEXODUS (a traditional model) is shown in Figure 13, and the OPS result is shown in Figure 14. The simulation result shows that the total evacuation time is 70.5 s, and the OPS on average is 0.1000.

Total evacuation time distribution of the cabin with 149 seats.

Optimal performance statistics of the cabin with 149 seats.
Meanwhile, the guiding model are used for 1000 calculations of the evacuation simulation. The total evacuation time is 66.5 s with the guiding model, and the time decreased by more than 5% compared with the former model. The OPS on average is 0.0693 using the guiding model, which is decreased by over 30%.
When camera monitoring devices/distance sensors and voice prompt devices are mounted on an airplane, the total evacuation time may decrease, which may save more lives.
Conclusion
This article proposed a dynamic estimation method of an aircraft emergency evacuation process based on cellular automate theory. In the method, a total of six categories (target exit choice, movement direction selection, movement speed calculation, behavior representation, crew operation, and exit modeling) and 24 evacuation regulations are considered. Using this method, two kinds of civil aircraft with 90 seats and 149 seats were calculated, respectively. The results show, for the 90 seats aircraft, the total evacuation time can be reduced by more than 10%, and optimal performance statistics can be reduced by more than 40%; for the 149 seats aircraft, the total evacuation time can be reduced by more than 5% and optimal performance statistics can be reduced by more than 30%.
Footnotes
Appendix 1
Handling Editor: Xichun Luo
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.