
Abstract
Hybrid electric vehicles equipped with continuously variable transmission show dramatic improvements in fuel economy and driving performance because they can continuously adjust the operating points of the power source. This article proposes an optimal control strategy for continuously variable transmission–based hybrid electric vehicles with a pre-transmission parallel configuration. To explore the fuel-saving potential of the given configuration, a ‘control-oriented’ quasi-static vehicle model is built, and dynamic programming is adopted to determine the optimal torque split factor and continuously variable transmission speed ratio. However, a single-criterion cost function will lead to undesirable drivability problems. To tackle this problem, the main factors affecting the driving performance of a continuously variable transmission–based hybrid electric vehicle are studied. On that basis, a multicriterion cost function is proposed by introducing drivability constraints. By varying the weighting factors, the trade-off between fuel economy and drivability can be evaluated under a predetermined driving cycle. To validate the effectiveness of the proposed method, simulation experiments are performed under four different driving cycles, and the results indicate that the proposed method greatly enhanced the drivability without significantly increasing fuel consumption. Compared to a single-criterion cost function, the use of multiple criteria is more representative of real-world driving behaviour and thus provides better reference solutions to evaluate suboptimal online controllers.
Keywords
Introduction
Both academic researchers and car manufacturers are continuously attempting to improve the fuel consumption of hybrid electric vehicles (HEVs). The use of continuously variable transmission (CVT) in HEVs has been proven to be a promising solution to achieve these improvements1,2 because it avoids driving problems such as power interruption caused by multi-gear automatic transmissions. Moreover, with CVT, the speed ratio can be continuously changed according to the working condition to ensure that the power sources always operate close to their most efficient regions.
The design of a CVT-based HEV is a multidomain task, and energy management strategy (EMS) poses one of the major challenges because it greatly impacts the fuel economy by controlling the CVT speed ratio and power distributions among power sources. To address this challenge, a series of important theories and methods have been developed, which can be divided into two categories: heuristic methods and optimization methods. Heuristic methods, such as rule-based and fuzzy logic,3,4 are rather intuitive, but optimality is not guaranteed. Instantaneous optimization methods such as the equivalent consumption minimization strategy (ECMS),5,6 model predictive control7,8 and the stochastic dynamic programming algorithm 9 use a high-fidelity vehicle model and seek to find the optimal control to minimize the cost function at each instant. These methods can be implemented in a real-time controller but often yield suboptimal results. On the other hand, global optimization methods such as DP are commonly used for solving optimal energy management problems over a finite horizon.10,11 The main drawbacks of such methods are their high computation cost and the need to know the driving cycle in advance, which make these methods inapplicable in an actual controller. However, the results of global optimization methods can be used as a reference for component sizing and for evaluating real-time strategies. 12
Driving performances is another major challenge that affects the performance of the control strategies, which is majorly affected by the engine torsional vibrations and dynamic characteristics of the driveline. 13 Global optimization methods focusing only on the fuel economy may lead to unexpected driveline behaviours and result in poor drivability. Debert et al. 14 analysed this phenomenon and used a quadratic cost function to constrain the high variation of the gear shifts in the DP to enhance drivability. Opila et al. 15 accounted for the drivability metrics in the cost function and used shortest path stochastic dynamic programming (SP-SDP) algorithm to trade off between the fuel consumption and the drivability. Miro-Padovani et al. 16 and Vidal-Naquet and Zito 17 used ECMS-based strategy to online minimize the fuel consumption as well as drivability metrics. However, few literature have addressed the drivability problem due to the CVT dynamics of an HEV. Practically, strategies focused on fuel optimization for a CVT-based HEV can lead to excessive engine on/off events and violent fluctuations of the CVT speed ratio. Engine on/off events often involve mode switching and undesirable pollutant emissions, and a fast change of the CVT speed ratio will cause a sharp variation in the vehicle velocity, which will significantly impact driving comfort and vehicle safety. 18 Therefore, an effective optimization model with both fuel economy and drivability considerations is of great practical significance for improving the overall performance of CVT-based HEVs.
In this article, DP is adopted to find the overall minimization of fuel consumption based on a quasi-static model of a CVT-based HEV. Furthermore, drivability problems arising from the algorithm for solving the optimal control problem are studied. Two penalty terms were then chosen to constrain excessive engine events and the rate of change of the CVT speed ratio. To validate the effectiveness of the proposed method, simulation experiments are performed under standard driving cycles, and the results are compared between basic DP and the proposed method.
HEV powertrain modelling
Vehicle architecture
A typical CVT-based parallel hybrid configuration is depicted in Figure 1. An electric machine (EM) is connected with the engine through a disc clutch in a pre-transmission configuration. An electric oil pump is employed to provide the hydraulic pressure and flow of the CVT hydraulic system in order to meet the pressure requirement during pure electric driving. The battery provides the necessary energy storage for the EM to function as either a motor or generator. Mode transition is realized through the clutch. Engine torque can be delivered through the rotor of the EM and the CVT to the driving wheel when the clutch is engaged, while the HEV can be driven in a purely electric mode when the clutch is disengaged.
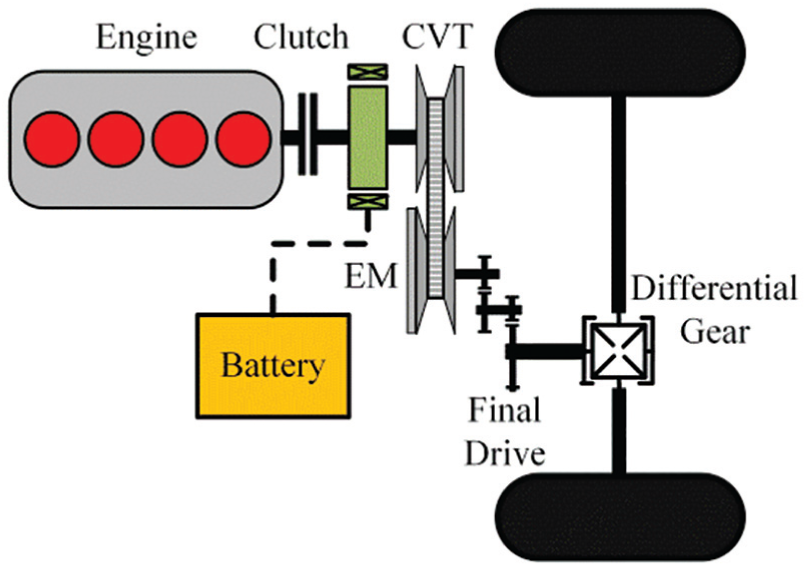
Vehicle configuration.
Vehicle models
There are two different modelling approaches can be adopted in the research: the forward- and the backward-facing modelling. The former requires a ‘high-fidelity’ vehicle model to reveal the dynamic details of the driveline, while the latter is usually adopted to design and test of the high-level control strategies.
Since numerical method is used in this article, the offline computation is very sensitive to the number of system state variables and the resolution of the motion equations of the vehicle. For this reason, a ‘control-oriented’ backward quasi-static model is adopted for the simulation, as depicted in Figure 2. The driving cycle profile provides the set points of velocity

Backward-facing modelling of the HEV.
The torque demanded to propel the vehicle is approximated by the sum of the aerodynamic drag force, rolling resistance and longitudinal acceleration resistance. Here, the influence of the slope resistance is ignored, since the vehicle is assumed to be driven on the flat road surface

where CD is the drag coefficient of wind, A is the frontal area, m is the total mass of the vehicle,

where
Internal combustion engine
The engine is modelled as steady-state look-up tables; it is assumed that the engine torque must exactly match the torque demand, so the dynamic characteristics of the engine are ignored here. The universal characteristics of the engine are obtained through bench tests. The fuel flow rate is a function of the engine speed and torque:

where LHV is the lower heating value of the fuel and

EM
The EM is also modelled as static look-up tables based on an efficiency map through bench tests. Since the EM is directly coupled to the engine crankshaft, when the clutch is engaged; it rotates at the engine speed because the connection between the engine and the EM is considered to be rigid

Together with the torque required for the EM, the required electric power can be derived from the following equation

where
CVT
Compared with a multi-gear automatic transmission, a standard hydraulic-actuated push-belt CVT has a lower average efficiency owing to the oil pumping torque loss and mechanical belt friction. 19 The CVT model used in this article employs an electric oil pump instead of a mechanical oil pump, which can decouple the flow of oil pump from the engine speed and reduce the energy consumption of the oil pump. The CVT mechanical efficiency is a function of the speed ratio, input speed and torque

The power demand of the drive motor can be derived by

where

where
Battery
The battery (a lithium-ion battery is considered) is modelled as a static equivalent circuit based on data from an experiment of charging and discharging of the battery. The battery current can be calculated from the following equation

where the battery power

The battery state of charge (SOC) can be derived using an ampere-hour integration

where
Optimization modelling
Problem formulation
Deterministic DP is a useful approach to solve global optimization problems over a finite horizon. Solving a given DP problem is time-consuming because the computational burden increases exponentially with the number of state and control variables, which is a problem that has been termed ‘The Curse of Dimensionality’. Thus, the DP algorithm can only be applied to a confined number of states and inputs. 20 The resolution of the grid of state and control variables will also influence the computational time; however, this factor is not within the scope of this article.
For a CVT-based HEV, the SOC of the battery is chosen as the only state variable,
Operating modes corresponding to different s(t) values.

Since DP is a numerical method used here to solve a continuous-time control problem, the continuous-time model must be discretized first. The complete discrete-time HEV model can be given as follows

where state variable

where
Drivability problems
As mentioned above, the cost function given by equation (14) only focuses on the minimization of the total fuel consumption over a given driving cycle and ignores the driving problems. Figures 3 and 4 depict the engine on/off events and the rate of change of the CVT speed ratio under the urban dynamometer driving schedule (UDDS). One can observe that intensive engine events occurred over a certain period of time, in addition to a violent fluctuation in the rate of change of the CVT speed ratio.
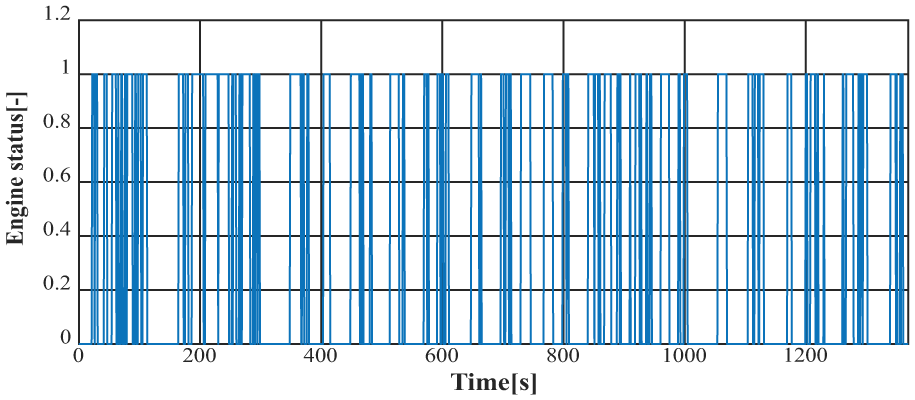
Engine on/off events under UDDS.

Rate of change of CVT speed ratio under UDDS.
Engine on/off often involves mode switching and undesirable pollutant emissions. Thus, excessive events should be avoided. In addition, a high rate of change of the speed ratio will have a negative impact on the dynamic behaviour of the driveline.22,23 Figure 5 shows the driveline dynamics of a CVT-based HEV. In the figure,


Driveline dynamics of a CVT-based HEV.
As the speed ratio changes, the rotational acceleration of the CVT output shaft changes accordingly and is proportional to the input equivalent moment of inertia and speed. A fast change of the speed ratio will cause a sudden change of the acceleration of the CVT output shaft. Such a sudden change, or jerk, will strongly impact the driving comfort and vehicle safety. According to the works by Wei et al.
24
and Chen,
25
an acceptable jerk of a vehicle is usually less than
In Figure 6(a) and (b), typical jerks of a vehicle are presented at a speed of 110 km/h with a CVT input torque of 100 N m. When the speed ratio is increased from 1 to 1.5 within 1 s, a high jerk of more than
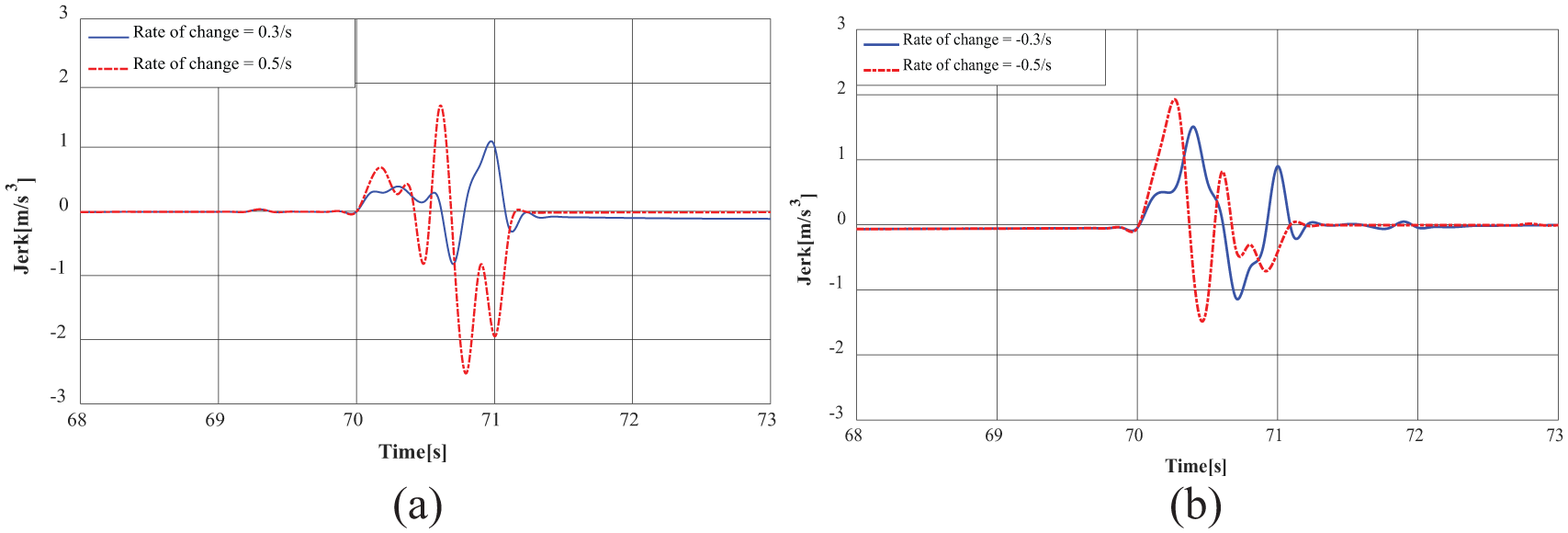
Vehicle jerk for (a) an increase and (b) a decrease in the speed ratio.
In order to enhance drivability, a multi-objective optimization method or the introduction of penalty terms can be adopted to find the best compromise between objectives. Here, we choose to penalize each engine event (on or off) and the rate of change of the CVT speed ratio. Thus, the cost function (equation (13)) can be rewritten as follows

subject to

where

In the cost function,
Implementation of DP
According to Bellman’s
26
principle of optimality, the DP algorithm needs to backward compute the cost-to-go function
End-step cost calculation

Cost calculation from step k = N − 1 to 0
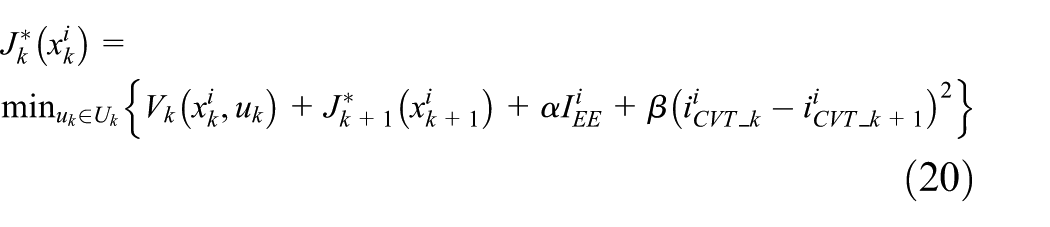
where

Interpolation diagram during backward calculation.
The output of recursive functions (19) and (20) is a signal map, which stores the optimal cost and control signals for every node in the state grid. During a forward simulation, interpolation is also needed to find the optimal control sequence when the actual state does not coincide with the points in the state grid. Finally, the optimal state trajectory can be obtained from a given initial state
Simulation results
Since weighting factors are not known a priori, it is necessary to first assess the influence of the weighting factors on the fuel consumption and drivability metrics. Simulations have been carried out under standard driving cycles, namely, UDDS, New European Driving Cycle (NEDC), Highway Fuel Economy Test (HWFET) and Worldwide Light-duty Test Cycle (WLTC). These driving cycles will generally test the controller under normal urban driving, highway and aggressive driving conditions. The velocity profiles of the driving cycles are shown in Figure 8. The time step

Velocity profile for (a) WLTC, (b) NEDC, (c) UDDS and (d) HWFET.
System parameters.

EM: electric machine; CVT: continuously variable transmission; EOP: electric oil pump.
Calculations were carried out for

Weighting factor
In order to evaluate the rate of change of CVT speed ratio improvement, a criterion

This criterion evaluates the variance of the rate of change of speed ratio from a global sense; a high value of
As demonstrated in Figure 10(a) and (b), when

Weighting factor

Speed ratio signals for different weighting factors
In order to further explore the influence of the weighting factors on the fuel economy, a series of calculations were performed under UDDS cycle for

Fuel consumption versus drivability weighting factors under the UDDS cycle.
In this part, comparisons were made between basic DP and the proposed method with weighting factors

Comparison of engine events between basic DP and the proposed method.

Rate of change of CVT speed ratio for the proposed method under the UDDS cycle.
The comparison of the torque split factor is shown in Figure 15(a) and (b). The torque split factor for the proposed method does not change frequently for basic DP, which implies that less mode switching is involved, resulting in better drivability. It is also clear that the introduction of penalty terms leads to greater usage of the engine recharge mode. This trend is also reflected by the battery SOC, as shown in Figure 16. In the basic DP, charge sustaining is realized by the brake energy regeneration during vehicle deceleration; thus, the SOC trajectory of the basic DP tends to be flat relative to that of the proposed method, and the SOCs for both basic DP and the proposed method are perfectly sustained at the end of the driving cycle owing to the hard constraint on the final state. Figure 17 shows a comparison of the cumulated fuel consumption. The proposed method results in a 4.5% increase in the fuel consumption.

Torque split factor for (a) basic DP and (b) the proposed method.

Comparison of the SOC between basic DP and the proposed method.

Comparison of the cumulated fuel consumption between basic DP and the proposed method.
Conclusion
The design of an EMS is a complex task, and DP is a powerful tool to obtain a global optimal solution. In this article, a ‘control-oriented’ quasi-static vehicle model is built and DP is adopted. To avoid the ‘Curse of Dimensionality’ when implementing the algorithm, the battery SOC is chosen as the only state variable and the global minimum of fuel consumption is solved by optimizing the torque split factor and CVT speed ratio.
A single-criterion cost function will lead to excessive engine on/off events and violent fluctuations in the CVT speed ratio signal, which will cause a sharp change of the vehicle velocity. To tackle this problem, a multicriterion cost function is proposed by introducing drivability constraints. By varying the weighting factors, the trade-off between fuel economy and drivability can be evaluated under a given driving cycle.
Simulation experiments have been performed to validate the effectiveness of the proposed method under four different driving cycles. Although the introduction of drivability constraints inherently results in extra fuel consumption, the results indicate that the proposed method effectively restricted the rate of change of the CVT speed ratio and significantly reduced excessive engine events with very little increase in fuel consumption. Compared to a single-criterion cost function, the results with multiple criteria are more representative of real-world driving behaviour and thus provide a better reference solution when evaluating suboptimal online controllers.
Footnotes
Handling Editor: Yanjun Huang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China PN51475151.