
Abstract
For the TFC35 steer-by-wire forklift, a linear 3-degree-of-freedom forklift model is given, which provides a verification model for variable steering ratio design. The concept of ideal steering ratio is expounded. The variable steering ratio algorithm based on constant yaw rate gain and the variable steering ratio algorithm based on constant lateral acceleration gain are studied. A variable steering ratio algorithm based on two kinds of gain combination is proposed. The advantages and disadvantages of the above three static variable steering ratio algorithms based on constant gain are simulated and analyzed. Aiming at complex working conditions, a dynamic variable steering ratio control scheme based on fuzzy neural network is proposed. The definition, implementation steps, and adjustment algorithms of each layer of fuzzy neural network are given. The final experiment results show that the dynamic variable steering ratio method based on fuzzy neural network is more resistant to the disturbance of its own parameters and can be used in complex dynamic conditions, which helps to improve the handling stability of the forklift.
Keywords
Introduction
Due to the increasingly serious environmental problems, people pay more and more attention to the pollution caused by the vehicles. Therefore, as an important industrial vehicle, electric forklift is widely used in warehousing, port short-haul, logistics, and transportation.1–4 Due to the nature of the work, full-loaded forklift often requires frequent steering in a narrow work space and thus have higher handling stability and steering flexibility requirements than other vehicles. However, most of the traditional forklift steering system is mechanical steering system or power steering system, the steering ratio remains unchanged, so the steering performance of the forklift will be affected by the velocity and hand-wheel angle, poor steering stability, and heavy driver workload.
The steer-by-wire (SBW) system breaks the shackles of the hydraulic transmission structure or the mechanical transmission mechanism in the traditional steering system and removes the mechanical connection between the four wheels and the hand wheel, so the steering ratio can be freely designed according to stability requirements.5–9 Therefore, at different velocities and hand-wheel angles, the SBW electric forklift has better steering characteristics, which helps to increase the handling stability of the forklift and decrease the workload on the driver.
Fachrudin designed an automatic steering control system based on particle swarm optimization (PSO) to optimize the parameters of the control system of the SBW vehicle. The system uses fuzzy logic control and proportional–integral–derivative (PID) controller cascade to work, and the vehicle’s handling stability under the action of the system is verified by simulation. 10 MT Do et al. proposed a robust sliding-mode control strategy for SBW vehicle and demonstrated that an SBW system with uncertain system parameters and unknown external disturbances between the tires and the road surface can be modeled as a second-order system. At the same time, the handling stability of the vehicle under the control is studied. 11 F Li et al. studied the effect of variable steering ratio (VSR) control on an SBW vehicle. The simulation shows that VSR control can limit the yaw rate within a certain range, and at the same time, it can help SBW vehicle achieve high steering sensitivity at low velocity and low steering sensitivity at high velocity, which improves the stability of the SBW vehicle. 12 Wang et al. proposed a novel adaptive terminal sliding-mode (ATSM) controller for SBW vehicle. The steering stability of the vehicle was experimentally studied under different driving conditions. Experiments show that the SBW vehicle controlled by the ATSM controller has better robustness. 13 P Yih and JC Gerdes used a combination of a global positioning system (GPS) and an inertial navigation system (INS) sensor to estimate the state of the SBW vehicle. The handling stability of the SBW vehicle under different disturbances was studied. 14 Wang et al. designed a new VSR control strategy, the inputs are velocity, lateral deviation, yaw rate error, and hand-wheel angle, and the output is the driver’s desired steering ratio. Simulation experiments show that the controller effectively decreases the driver’s workload. 15 Wang et al. 16 proposed an adaptive neural network sliding-mode controller for SBW vehicle, the controller is composed of two parts: the upper-level control stage and the lower-level control stage, the simulation shows that the handling stability of SBW vehicle can be improved by using this controller. The performance of a forklift powered by a hybrid system is studied by E Hosseinzadeh et al., and a hybrid system consisting of a proton-exchange membrane (PEM) fuel cell, and a lead-acid battery is modeled and investigated by conducting a parametric study. This study reduces the energy consumption of the SBW forklift. 17 Minav et al. designed an electric energy recovery system for a hydraulic forklift. In this study, the control of the lowering system and hydraulic lifting is lead out by an hydraulic machine. The efficiencies of the experimental drive system studied and its components are determined. As a result, 66% of the potential energy was recovered in the low-power drive, and enhancements could still be reached. 2
For the study of SBW system, many scholars have done a lot of work, not only theoretical analysis but also real car test. However, most of these researches are aimed at the automobile, and there are few researches on the forklift. Based on the research of actual electric forklift, B Xiao and colleagues18,19 and Zhang and Xiao 20 proposed that fuzzy control of steering wheel angle and fuzzy VSR control of SBW electric forklift increase the steering performance of electric forklift.
The combination of SBW system and electric forklift can improve handling stability and steering flexibility of the forklift so as to effectively increase the working efficiency of the forklift and decrease the workload on the driver. Therefore, the research on the SBW electric forklift is very valuable.
In this article, the handling stability requirements and the control requirements of SBW electric forklift are determined. A linear 3-degree-of-freedom (3DOF) forklift model is proposed as the verification model of algorithms. Three static VSR algorithms based on the linear 3DOF forklift model are designed, compared, and simulated. A scheme of dynamic VSR based on fuzzy neural network (FNN) is designed for the SBW forklift working in complex conditions, and the experiment is given.
Handling stability requirements and control requirements of electric forklift
For a typical vehicle, the handling stability of the vehicle is mainly characterized by the yaw rate and sideslip angle. 21 However, because of the large body of the electric forklift, the impact of roll movement on the stability of the forklift cannot be ignored. Therefore, the roll angle and the roll rate are also important parameters. For an electric forklift, the yaw rate focuses on the condition of over-steering or under-steering of the forklift, and roll angle and roll rate focus on the tilt level of forklift during steering; therefore, these three parameters can be used to characterize the stability of the forklift. Sideslip angle is used to characterize the degree of deviation between the actual trajectory and the predetermined trajectory of the forklift while driving. Therefore, the sideslip angle can be used to represent the forklift’s maneuverability. It should be noted that stability and maneuverability are not independent, but inseparable. If the stability of forklift is poor, prone to skidding and rollover, the maneuverability is difficult to guarantee. If the maneuverability of forklift is poor, which means the forklift always deviate from the predetermined trajectory, the stability will be greatly decreased.
When the forklift is turning at low velocity (0–3 km/h), increasing the steering sensitivity and decreasing driver’s workload are the primary issues to consider, so the yaw rate response should be large enough to increase steering sensitivity and make steering easier.
When the forklift is turning at high velocity (10–12 km/h), the most important thing is to improve the steering stability of the forklift. At this moment, the sideslip angle should be small enough to keep the performance of trajectory tracking good; the yaw rate response should be small enough to keep the steering dull; the roll angle and the roll rate should be close to 0, to ensure that the forklift will not rollover; and the forklift should not be too sensitive to the hand-wheel angle input to ensure stability.
Linear 3DOF forklift model
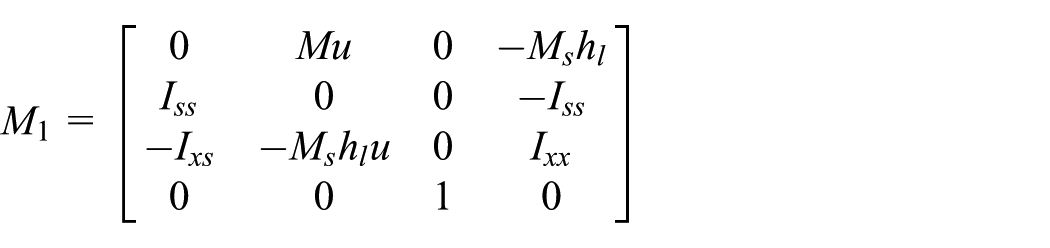
Extensive tests have shown that among the 6DOF of the forklift movements, the longitudinal, vertical, and pitching movements are not related to the steering stability and can be neglected. The emphasis is on lateral movement, yaw movement, and roll movement. Therefore, the lateral, yaw, and roll movements are chosen to establish the forklift steering model. Linear 3DOF forklift model is shown as equation (1)

where



where
VSR algorithms based on constant gain
Different from the mechanical steering system with fixed steering ratio, SBW system can change the steering characteristics of a forklift by changing the steering ratio.
22
Therefore, when the forklift is steering at different velocities, the steering ratio can be adjusted to make the steering gain of forklift keep constant, the corresponding steering ratio is the ideal steering ratio. The steering ratio of electric forklift can be defined as the ratio of hand-wheel angle

In the study of forklift steering characteristics, the steering gain are mainly measured by the yaw rate


where
From equations (3) and (4), it can be seen that due to the fixed steering ratio of the mechanical steering system in a traditional forklift, these two gains change continuously with the change of the velocity, which means that the driver needs to constantly adjust the forklift’s driving state to adapt to the changing steering characteristics in order to ensure the stability of the forklift, the workload of driver is heavy.
Therefore, it is necessary to design a VSR method to make the forklift maintain good steering characteristics at different velocities, decrease the frequency of the driver manually adjusting the driving state of the forklift, improve steering stability, and safety. Based on equations (3) and (4), the VSR algorithms based on constant yaw rate gain and constant lateral acceleration gain is designed respectively, and the VSR algorithm based on two kinds of gain combination is proposed.
From equation (3), the ideal steering ratio based on constant yaw rate gain can be obtained as equation (5)

From equation (4), the ideal steering ratio based on constant lateral acceleration gain can be obtained as equation (6)

A VSR based on two kinds of gain combination is defined as shown in equation (7)

where
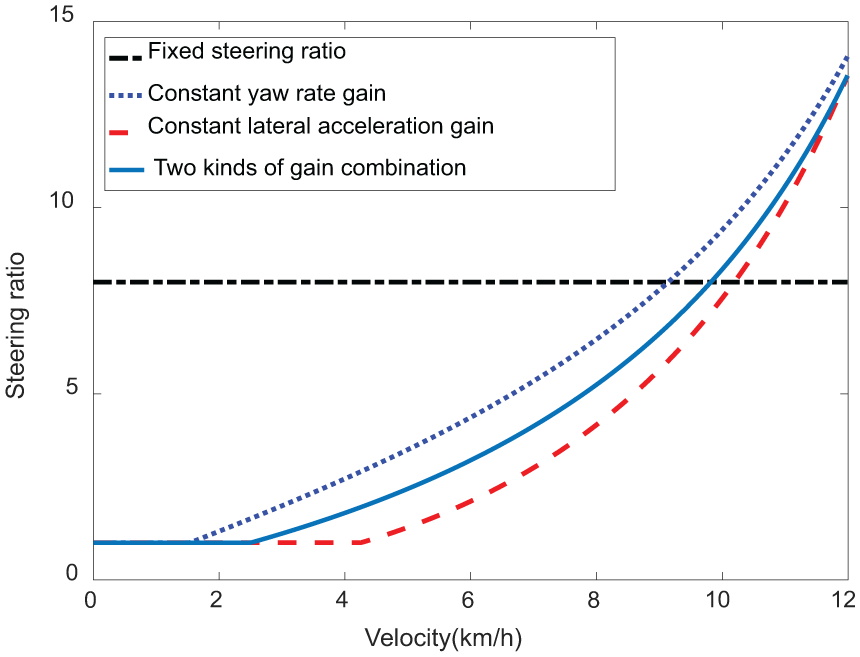
The curve of steering ratio changing with velocity.
The parameters of forklift TFC35 are as follows: the mass of whole forklift
It can be seen from Figure 1 that the range of steering ratio based on constant yaw rate gain is [1, 14.10], the range of steering ratio based on constant lateral acceleration gain is [1, 13.55], and the range of steering ratio based on two kinds of gain combination is [1, 14.05]. When the velocity is low, three static VSR algorithms based on constant gain all meet the requirement that the minimum steering ratio is a fixed value and is smaller than the fixed steering ratio of traditional forklift, which meet the requirements of steering sensitivity. When the velocity increased, the three static VSR algorithms meet the requirement that steering ratio increases with forklift velocity. When the velocity is high, steering ratio of three static VSR algorithms is greater than steering ratio of traditional forklift, which meets the requirement of handling stability.
Control strategy of static VSR algorithm
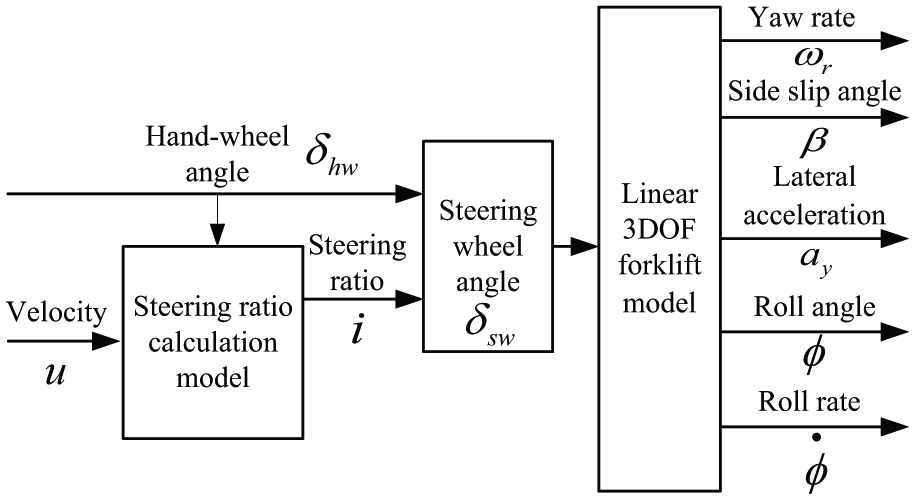
Different from the traditional steering system, SBW system can change the steering characteristics of forklift by changing the steering ratio. For a low-velocity forklift, the steering ratio should be designed small enough to ensure steering maneuverability; for a high-velocity forklift, the steering ratio should be designed large enough to keep the steering dull and improve handling stability. In order to study the influence of different static VSR algorithm on the stability of forklift, the linear 3DOF forklift model is used to simulate the steering characteristics of different VSR algorithm. By dividing the hand-wheel angle by the steering ratio, the steering wheel angle can be obtained, and then the resulting steering wheel angle can be fed into the linear 3DOF forklift model to obtain the system response of the forklift at different state. Simulation model is shown in Figure 2.
Simulation model of VSR control strategy.
In order to verify the accuracy of the linear 3DOF forklift model, the given velocity is 12 km/h, the steering ratio is set to a fixed value of 8, and the hand-wheel angle input is a sinusoidal input. The 3DOF forklift simulation curve is compared with the real experimental curve. The comparison curve is shown in Figure 3.

The responses of linear 3DOF forklift model: (a) the yaw rate responses of linear 3DOF forklift model, (b) the lateral acceleration responses of linear 3DOF forklift model, (c) the sideslip angle responses of linear 3DOF forklift model, (d) the roll angle responses of linear 3DOF forklift model and (e) the roll rate responses of linear 3DOF forklift model.
It can be seen from Figure 3 that under the same input, yaw rate, sideslip angle, lateral acceleration, roll angle, and roll rate output by the 3DOF model are the same as the curves of the actual experiment, and the values are also substantially equal, so the linear 3DOF forklift model is available.
Fixed steering ratio control scheme of traditional mechanical steering system
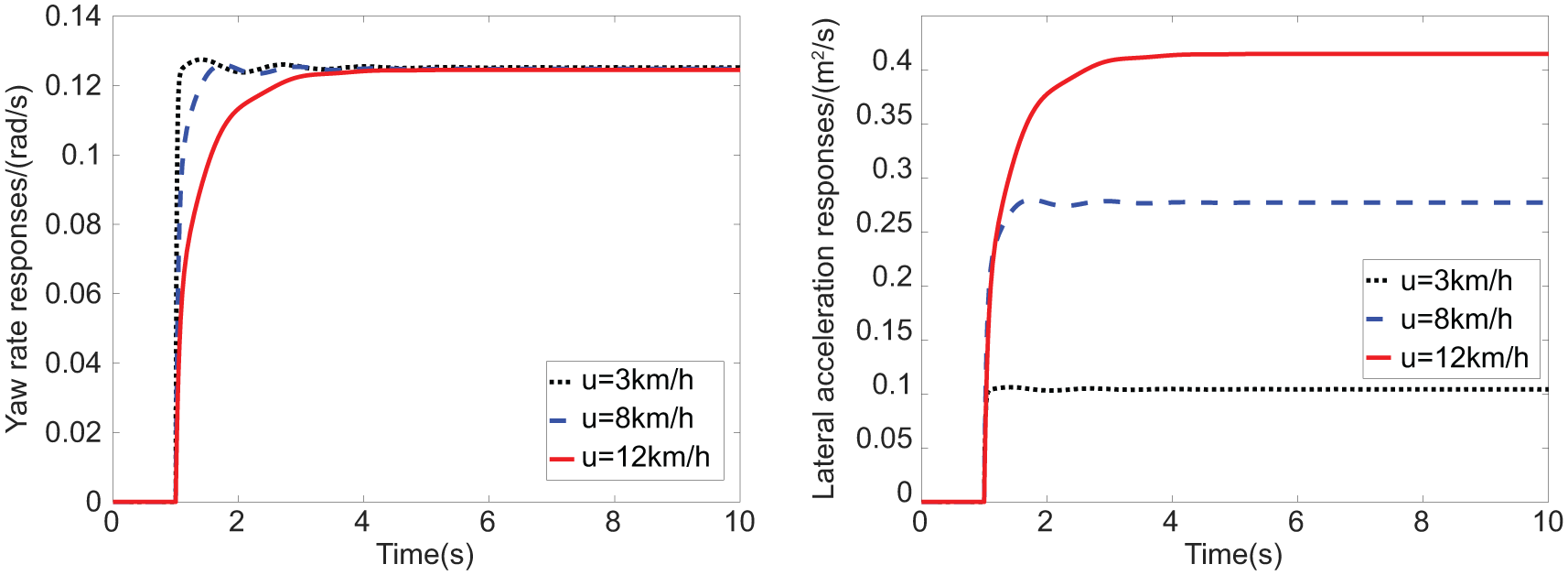
Setting the steering ratio to 8, given a 30° hand-wheel angle as step input signal, simulating forklift suddenly turns under different velocities. The simulation results shown in Figure 4 can be obtained.

The responses of fixed steering ratio.
It can be seen from Figure 4 that when using the traditional fixed steering ratio to control, the yaw rate responses of forklift ranges from 0.03 to 0.22 rad/s and the lateral acceleration responses of forklift ranges from 0.02 m2/s to 0.73 m2/s, which means both
The design of VSR based on constant yaw rate gain
When the VSR algorithm based on constant
The responses of VSR algorithm based on constant
It can be seen from Figure 5 that when using the VSR algorithm based on constant
When the lateral acceleration responses of forklift ranges from 0.11 to 0.42 m2/s, the maximum lateral acceleration 0.42 m2/s does not exceed the threshold (0.4 g) of the stability range and is smaller than the lateral acceleration of mechanical steering system. Compared with the traditional steering system with fixed steering ratio,
The design of VSR based on constant lateral acceleration gain
When using the VSR algorithm based on constant

The responses of VSR algorithm based on constant
It can be seen from Figure 6 that when using the VSR algorithm based on constant
The design of VSR based on two kinds of gain combination
When using the VSR algorithm based on two kinds of gain combination to control, the simulation model is shown in Figure 2. The experimental state is the same as that of Figure 4. The simulation results are shown in Figure 7.

The responses of VSR algorithm based on two kinds of gain combination.
It can be seen from Figure 7 that when using the VSR algorithm based on two kinds of gain combination to control, the yaw rate responses of forklift ranges from 0.12 to 0.20 rad/s and the lateral acceleration responses of forklift ranges from 0.17 to 0.42 m2/s.
Compared with VSR algorithm based on constant
Influence of static VSR algorithm on the handling stability of forklift under high velocity
Forklifts are most likely to fall into an unstable state when steering at high velocity, so it is necessary to compare the high-velocity handling stability of forklifts when several static VSR algorithms are used. The velocity of the forklift is set to 12 km/h, the hand-wheel angle is set to a 30° step signal, and the above-mentioned velocity signal and hand-wheel angle signal are fed into the 3DOF model shown in Figure 2. The yaw rate, sideslip angle, lateral acceleration, roll angle, and roll rate responses of the forklift under different static VSR algorithms can be obtained as shown in Figure 8.

The responses of several static VSR algorithm: (a) the yaw rate responses of several static VSR algorithm, (b) the lateral acceleration responses of several static VSR algorithm, (c) the sideslip angle responses of several static VSR algorithm, (d) the roll angle responses of several static VSR algorithm, and (e) the roll rate responses of several static VSR algorithm.
For the three static variable ratio control methods, their control ability is difficult to distinguish at high velocity, but the VSR algorithm based on constant
Dynamic VSR scheme
The above three static VSR control strategies derived from equations (5)–(7) belong to static control, ignoring the influence of work condition parameters on the steering ratio and the stability of the forklift. In fact, due to the complexity of the working environment, the parameters of forklift will be perturbed by external factors such as load changes, changes of road conditions, and tire deformation, which will affect the steering characteristics of the forklift. Therefore, in order to decrease the influence of these dynamic factors on the stability of the forklift, a dynamic VSR control scheme based on FNN is proposed.
VSR design based on FNN
Fuzzy control is a kind of rule-based control. It directly adopts the language control rules and does not need to establish an accurate mathematical model of the controlled object in the design, so the control mechanism and strategy are easy to accept and understand. Moreover, the fuzzy control has a strong fault-tolerant ability, so it has the ability to adapt to changes in the dynamic characteristics of the controlled object, changes in environmental characteristics, and changes in the conditions of action.24,25 For the design of vehicle dynamic VSR, many scholars have presented the method of fuzzy VSR, which can increase the dynamic characteristics of vehicles.26,27 However, the starting point of fuzzy control is the control experience of designers or the knowledge of experts, which means fuzzy control lacks the self-adaptive and self-learning abilities, and the design rules of steering ratio are formulated by designers. Therefore, if the designers lack experience, the design accuracy of the control rules is difficult to guarantee.
Artificial neural network (ANN) has self-adaptive ability due to its unique model structure and inherent nonlinear simulation capability. However, although the ANN has the self-adaptive and self-learning abilities and does not rely on the control experience of designer, it cannot handle fuzzy information.
The adaptive neural network based on fuzzy inference system combines the self-adaptive and self-learning abilities of ANN with the uncertain reasoning ability of fuzzy logic. FNN not only can automatically generate the universe and control rules of fuzzy variables by training but also has the ability to handle fuzzy information, which can avoid the absence of control accuracy due to the lack of control experience of designers.28–31
Based on the test of TFC35 electric forklift, VSR control scheme based on FNN is designed. The inputs are the velocity and the hand-wheel angle, and the output is steering ratio. The VSR control scheme based on FNN can avoid the artificial design of the fuzzy control rules and the difficulty of selecting the amplitude of the membership function, which means the FNN model can achieve the desired performance index.
The structure of FNN is shown in Figure 9.

The structure of FNN.
The first layer is FNN input layer, whose role is to bring input variables into the network. The two inputs are the velocity
The second layer is the network’s fuzzy layer, whose role is to fuzzy the input. Each node represents a language variable value. According to the test data of the forklift TFC35, the range of the forklift velocity is (0, 12) km/h, and the hand-wheel angle is ranged within (–90°, 90°).

where
The third layer is the fuzzy reasoning layer, whose role is to achieve fuzzy “AND” operation. Since both

where j = 1, 2,…, m,
The fourth layer is the normalization layer, whose role is to achieve normalized calculation. The number of network nodes in the fourth layer is 49. The equation of this layer is

The fifth layer is the clarification layer, which is the output layer. The role of fifth layer is to clarify calculations. This layer converts the output of each node in the fourth level to the exact value of the output variable, its corresponding equation is

From the above equation, it can be seen that the output of the FNN is the weighted sum of the consequent of each rule, and its weighting coefficient is the normalized applicable degree of each fuzzy rule. The training process of the FNN mainly determines the connection weight
The error function is selected as

where
The method of gradient descent is used to adjust the connection weight

Where, the learning algorithm of the connection weights
Simulation analysis
The training data of FNN are the actual test data of TFC35 forklift shown in Figure 10. The hand-wheel angle and steering wheel angle are measured using the potentiometer shown in Figure 11. By dividing the hand-wheel angle by the steering wheel angle, the steering ratio can be obtained. The velocity is measured with the encoder installed in the drive motor shown in Figure 12. Some of the data are shown in Table 1.

TFC35 electric forklift.
The potentiometer in TFC35 electric forklift.

The drive motor in TFC35 electric forklift.
Part of test data.

The error back propagation learning algorithm is used to reduce the error, the maximum training time is set to 3000 epochs, the learning rate are

The results of VSR based on FNN: (a) membership functions of velocity, (b) membership functions of hand-wheel angle, and (c) VSR surface map.
As can be seen from Figure 13, when the FNN is used for the VSR control scheme, the steering ratio and the velocity were positively correlated. When the velocity is low, the steering ratio is a small setting, which satisfies the flexibility of forklift at low velocity; and at a higher velocity, the steering ratio is relatively large to meet the handling stability of forklift at a high velocity. In summary, VSR controller based on FNN meets the control requirements of SBW forklift.
The velocity and hand-wheel angle are substituted into the VSR controller based on the FNN to get the corresponding steering ratio, and then the resulting steering ratio is substituted into the simulation model in Figure 2, the steering characteristics of forklift can be obtained. The experimental state is the same as that of Figure 4, the simulation results are shown in Figure 14.

The responses of VSR control with FNN.
It can be seen from Figure 14 that the range of yaw rate response is (0.085, 0.121) rad/s and the range of lateral acceleration response is (0.10, 0.32) m2/s when using VSR control scheme based on FNN to control. Compared with the VSR algorithm based on two kinds of gain combination, the variation range of yaw rate and lateral acceleration have been decreased, indicating that the driver’s workload is lighter. Compared with the VSR algorithm based on constant
In order to simulate the influence of the change of the forklift’s parameters on the steering ratio when the forklift is traveling under complicated working conditions, the given velocity is 3, 8, and 12 km/h, respectively, the hand-wheel angle is set as 0°, giving a noise signal to the cornering stiffness of front wheel to simulate the change in the cornering stiffness of the tires caused by rough terrain. The noise signal and the simulation results are shown in Figures 15–18.
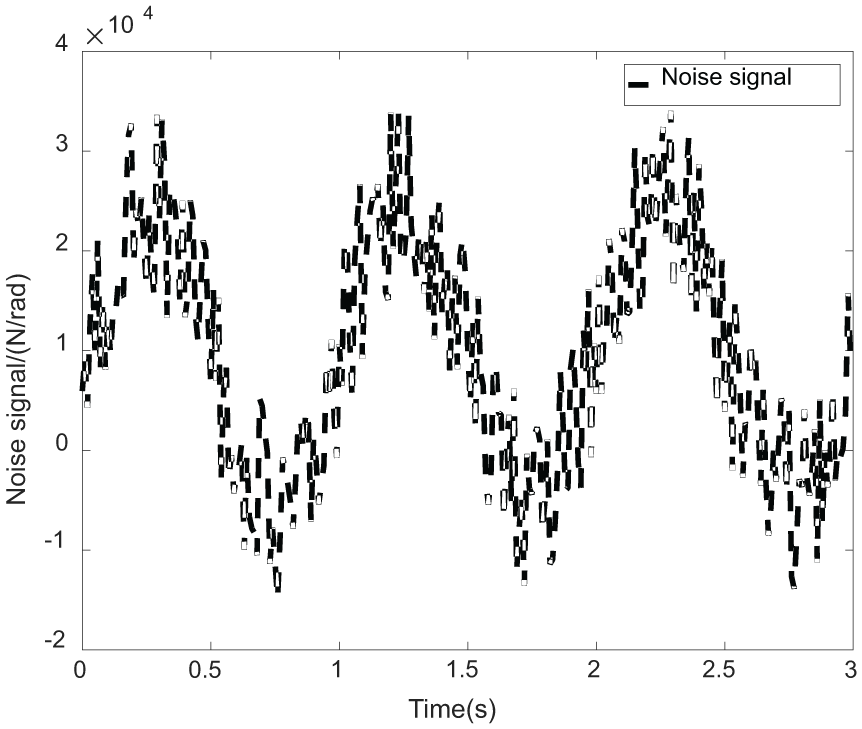
The noise signal.

The steering ratio when u is 3 km/h.

The steering ratio when u is 8 km/h.

The steering ratio when u is 12 km/h.
It can be seen from Figures 15–17 that under the same disturbance, when the forklift travels at low velocity (u = 3 km/h), the influence of the forklift’s own parameter perturbation on several VSR control methods is very low. With the increase of velocity, the variation of the lateral stiffness caused by the bumpy road and the deformation of the tires has more and more influence on the control methods of the three static VSR. The steering ratio of static VSR methods obviously changes with the disturbance at high velocity, which means the difficulty of handling forklift is increased. However, when the VSR control scheme based on FNN is used, the value of steering ratio is not affected by the perturbation of the forklift’s own parameters, only related with the velocity and the hand-wheel angle, the dynamic performance of the forklift is the best.
Experiment analysis of handling stability of VSR control under pavement disturbance
Due to the complexity of the work environment, electric forklift often requires continuous steering in complex working conditions. Therefore, the effect of uneven road surface, occasional obstacles, and other interference factors on the stability of the forklift cannot be ignored. In order to study the driving status of the forklift under this condition, given the maximum velocity of the forklift is 12 km/h, a sinusoidal signal with amplitude of 30° is used as the hand-wheel input. By analyzing the yaw rate responses, the steering stability of the forklift can be analyzed; by analyzing the sideslip angle response, the trajectory retention of the forklift can be analyzed; and by analyzing the roll angle response and roll rate response, the roll condition of forklift can be analyzed. The experiment result is shown in Figure 19.

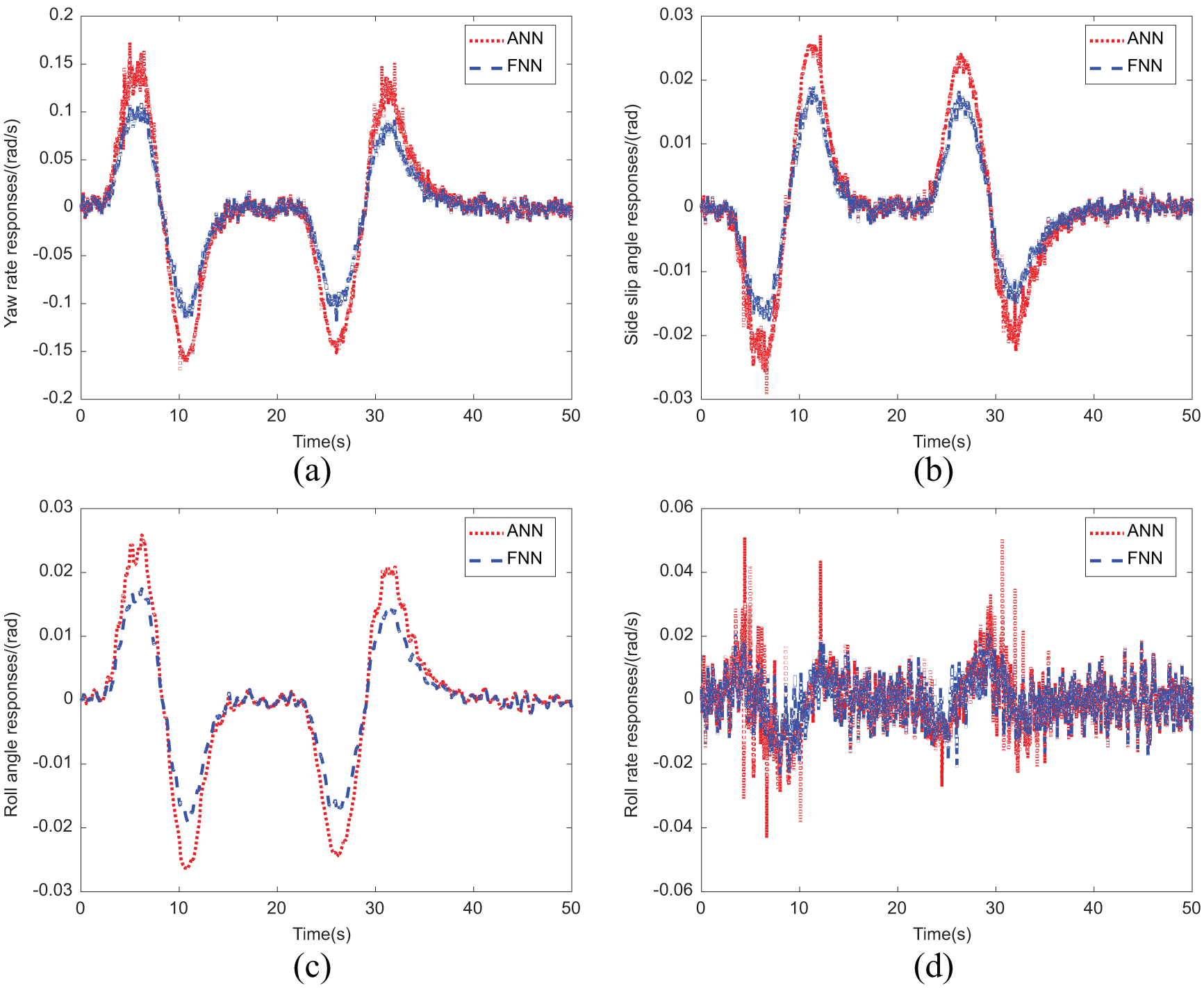
The forklift responses under complex road situation: (a) yaw rate responses, (b) sideslip angle responses, (c) roll angle responses, and (d) roll rate responses.
As can be seen from Figure 19, when the VSR control scheme based on FNN is used, the yaw rate responses, sideslip angle responses, roll angle responses, and roll rate responses are all decreased compared with VSR algorithm based on two kinds of gain combination. Moreover, the VSR control scheme based on FNN also shows better robustness under the same disturbance.
In summary, when the forklift with VSR controller based on FNN is steering at high velocity under complex situation, the performance of trajectory tracking is good, the steering sensitivity is low, and the stability is good, which means the forklift does not rollover.
Experiment analysis of double lane change
In order to study the influence of FNN on the handling stability of forklift in complex conditions, the forklift velocity was set at 12 km/h for double lane change experiment and an ANN controller was compared with FNN. The input layer of ANN in the comparison experiment has two nodes, which are the velocity and the hand-wheel angle. The output layer has one node, which is the transmission ratio. The hidden layer has five nodes. The training data are the same as the FNN. The experimental data are shown in Figure 20.
The forklift responses under double lane change: (a) yaw rate responses, (b) sideslip angle responses, (c) roll angle responses, and (d) roll rate responses.
As can be seen from Figure 20, both ANN and FNN can control the yaw rate, sideslip angle, lateral acceleration, roll angle, and roll rate in a stable range. However, due to the lack of the ability of ANN to deal with fuzzy information, the information processing is not ideal when the forklift makes sharp turns, causing the curve to fluctuate more at the turning point. It can be seen that FNN is better in handling stability control of electric forklifts.
Conclusion
As a common industrial vehicle, electric forklifts are widely used in complex environments such as warehouses, workshops, and docks, and therefore require high steering stability. As a new generation steering system, SBW system cancels the mechanical connection between the hand-wheel and the steering actuator in the traditional rear steering forklift and overcomes the constraint of the steering characteristics in the mechanical structure. It has the advantages of steering ratio freely design, improves the steering performance of the forklift, and can effectively decrease the driver’s workload. Therefore, the study of the electric forklift SBW system is very valuable.
Three static VSR algorithms based on linear 3DOF forklift model are designed. The simulation results show that VSR algorithm based on two kinds of gain combination can more effectively improve the steering performance of the forklift than the VSR algorithm based on constant yaw rate gain and the VSR algorithm based on constant lateral acceleration gain. In order to reduce the influence of forklift’s own parameters disturbance and pavement disturbance on the steering performance of forklift under complex working conditions, a VSR control scheme based on FNN is proposed. In order to test the impact of this method on the handling stability of the forklift, the experiment is done under different conditions. The experiment results show that as the velocity increases, the static VSR control algorithms based on constant gain have more and more poor resistance to the disturbance caused by its own parameters, while the dynamic VSR control scheme based on the FNN has better robustness, can ensure the handling stability of the forklift under complex working conditions, and greatly decrease the workload of the driver.
Footnotes
Acknowledgements
This work is supported by the Hefei Banyitong Science and Technology Development Co, Ltd. The authors are grateful to senior engineer Junliang Guo, Zijian Fang, Pengfei Li, Xingzhi Fang, Weilin Lv for their cooperation and helpful suggestions. Besides, the authors sincerely thank to the graduate students Jianan Wu, Luxi Pan, Qinglin Zhang, Jingjing Ma, Longbiao Wang, Yan He, Chao Zhang and Guohua Xiang et al., in the same study room, for their valuable contributions.
Handling Editor: Yanjun Huang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no.: 51577046), the State Key Program of National Natural Science Foundation of China (grant no.:51637004), and the national key research and development plan “Important Scientific Instruments and Equipment Development” (grant no.: 2016YFF0102200).