
Abstract
This article describes an easy way to apply active control upon all jerk systems for which the linear part of the third-order differential jerk equation strongly depends on acceleration and velocity. The kernel of that methodology is to rewrite the jerk equation as a single implicit first-order differential equation escorted with a sliding variable. It is shown that, for such a jerk class, the fast terminal sliding convergence based on Lyapunov stability is achieved with a first-order sigmoid sliding surface. Various numerical simulations have been conducted on Sprott simple jerk class as well as on the single op-amp jerk system. For experiment, we synchronize two Sprott circuits with nonlinearity being the absolute value of position. Experimental results match well with numerical simulations.
Introduction
Third-order explicit autonomous differential equations in one scalar variable, or mechanically interpreted as jerky dynamics, constitute an interesting subclass of dynamical systems that can exhibit many major features of regular and irregular or chaotic dynamical behaviour. 1 Several works have been done on that subclass of dynamic equations. One of the main focuses of that research was oriented towards the search for the group of simple systems (in terms of equations)1,2 and simple circuits (in terms of electronic components).3–6 The notion of simplicity, widely discussed in the literature,1,3,5 has given birth to a group of systems called a class of simple jerk systems and circuits. In fact, Sprott 3 published a paper in which he reported a class of jerk equations for which the nonlinear part is simply a function of the position (NFP), or a function of both position and velocity (NFPV). The corresponding autonomous electrical circuits of each element of that reported class are constructed with fewer numbers of electric components restricted only to capacitors, resistors, diodes and op-amps. However, with an air-core inductor and the above listed components, another NFP simple circuit has been implemented without being subject to nonlinear and hysteresis effects of core saturation. 4 The nonlinear part of jerk equations can also be given as a function of position, velocity and acceleration (NFPVA). Such systems have been electronically implemented, as a single op-amp autonomous jerk circuit.5,7 Here, for the first time electronic components others than the four listed above were included in a jerk circuit. Consequently, a junction field effect transistor (JFET) proved to be effective in reducing the circuit to only five components and to introduce a nonlinearity of type NFPVA. 5 Although the modification in order to reduce the number of components is an advantage, it may bring new variables (velocity and acceleration) in the nonlinear term as a consequence,3,5,7 rendering the practical implementation of the controller more difficult. Fortunately, this change in the nonlinear term does not affect the control of jerk systems when the approach proposed in this article is applied.
In the subfield of control and synchronization, there is a rich literature on the simple jerk class (NFP) described by Sprott. A common feature in this literature is that the convergence is achieved with two systems of equations using various control methods with kernel being based on the system state variables as usually applied on nonlinear circuits.2,8–17 However, with this approach the control error is not accurate enough because it is subject to either chattering phenomenon or the closeness to initial conditions. This led scientists to develop new approaches. In previous studies,11,18,19 for instance, different authors used the sliding mode control (SMC) method to achieve the synchronization of their error systems. In fact, the SMC is an asymptotic convergent method based on the linear manifold. Although it is found to be robust enough, it presents the disadvantage of not preventing the system from the chattering phenomenon in the graphical results on one hand and of closeness to initial conditions. To solve that issue, the terminal sliding mode (TSM) control and the fast terminal sliding mode (FTSM) control have been introduced. These are based on nonlinear manifold (cubic root function) and are not easy to be implemented because of the difficulty to manipulate a large number of system variables simultaneously with a nonlinear controller.16,17,20–22 In practice, its implementation is limited by the efficiency of the electronic block which insures less delay as well as high sensibility to small input signal of its error system.10,23
From the above presentation, it can be deduced that several authors have investigated the control of jerk systems using its sets of first-order differential equations despite the limitation that it sometimes imposes in the implementation of the nonlinear part of the controller. In this work, we aim at exploiting the advantage offered by the transformation of jerky dynamic equation
Create a single first-order differential equation that implicitly depends on the variables of the jerk equation (position, velocity and acceleration) and which will be used for control instead of the system state variables;
Achieve the fast finite-time synchronization of two jerk systems with a nonlinear hyperbolic tangent manifold surface;
Build experimentally a controller for Sprott circuit.
The rest of the article is organized as follows: section ‘Model equations’ shows the elaboration of the implicit equation and presents the jerk class equations of the related circuits. Section ‘FTSM synchronization of two circuits encoded by an implicit equation’ deals with the FTSM synchronization of two systems coupled in a unidirectional way, using a sigmoid hyperbolic tangent manifold of an implicit variable. In section ‘Experimental results’, experimental simulations based on the FTSM methods are performed and the last section is devoted to the conclusion.
Model equations
Generally, the jerky dynamics of any system is given in the form of

where
Setting the linear part of equation (1) as

Figure 1 depicts the phase portraits of equation (1) for which the nonlinear parts are given in equation (2).

Phase portraits (position versus velocity) implemented in MATLAB. Images (a)–(f) correspond to equations (2a)–(2f), respectively.
As stated above, the construction of the implicit variable g will appear simpler in practice since y,
FTSM synchronization of two circuits encoded by an implicit equation
For synchronization as other applications of chaos, jerk systems are easy to manipulate thanks to their simplicity. 26 The aim of this section is to achieve the fast finite-time synchronization of two similar systems described by equation (1) using a nonlinear sliding surface of the implicit variable g. The nonlinearity of the controller is based on sigmoid function. 27 Generally, the sigmoid function is used in the SMC method to achieve asymptotical convergence of the controlled systems.2,3,10,11,13,18–29 However, with the advantages offered by jerk equations, the FTSM convergence can be obtained if the sigmoid function is a hyperbolic tangent function. Thus, we consider a pair of nonlinear electronic oscillators (described in equation (1)) coupled in the drive–response configuration as shown in equations (3) (the drive) and (4) (the response) below


Here, the position, velocity and acceleration are the system state variables hidden into the implicit variable

Generally, a sliding surface for the FTSM control method is defined by the following first-order differential equation14,17,21,22,28,29

where x is the state variable,
Since the nonlinear manifold

will help overcome the difficulty. Substituting

But, for the sake of simplicity, we are going to consider the case where the parameters of the drive and response systems are similar. Equation (8a) takes the simplified form in equation (8b) which is going to be used in the rest of the article

Equation (8) is designed to perform fast finite-time SMC with

with the first derivative

Substituting equation (7) into equation (10) leads to

According to equation (9)

so that

The substitution of equation (13) into equation (11) results in

from where it can be deduced by multiplying both sides by s

Considering the following Lyapunov function defined in equation (16) as

equation (15) becomes

The direct integration of equation (17) being rather complex, it can however be approximated to obtain the expression of time at which the system state variables converge to the equilibrium point.
Using the change of variables defined in equation (18), equation (17) can now be transformed into a simpler expression depicted by equation (19)


The mathematical evidence of equation (20) is then used to bound equation (19) with the usual FTSM Lyapunov derivative in order to estimate the convergence time. Then, for all

After some mathematical manipulations of equations (19) and (20), we obtain

Supposing

Applying the logarithm function on both sides of inequality in equation (22) leads to

with

Bounding equation (23) by equation (24) gives rise to the following relation

In the simplified form, equation (25) is reduced to equation (26)

The above inequality (equation (26)) can be verified using its particular solution
The next step is to estimate the synchronization time. Thus, equation (14) must fulfil the following conditions:

where

and

are the corresponding finite times of the usual Lyapunov function derivative. The inequality in equation (27) is derived by integrating the relations in equations (21) and (22).
Remark 1
The unidirectional synchronization of two jerk systems that have different parameters can be done using the controller of equation (8b), but in this case only the variable g will be controlled. Meanwhile, with equation (8a), in addition to
Table 1 shows the initial conditions, the synchronization time and the system as well as the control parameter values that are used to synchronize two identical systems of equation (2) with different initial conditions.
Synchronization time of the error system with

The last row of Table 1 displays values which confirm that the finite-time convergence was achieved. Each error system is obtained as
Figures 2 and 3 present the numerical results of equation (5) obtained with the controller in equation (8), using the values presented in Table 1 and considering equations (2a)–(2g), respectively. These figures show that the fast finite-time convergence is achieved for each error system and display their corresponding magnified images. It can be seen from Figures 4 and 5 that even at a precision of the order

Synchronization error variables versus dimensionless time t. Graphs on columns 1–5 represent the results for systems (2a)–(2e) of equation (2), respectively. Graphs from the top to bottom show in each column error on the variables x, y and z and the sliding variable g, respectively. Note that the precision here is of the order

Synchronization error variables versus dimensionless time t. Graphs on columns 1 and 2 represent the results for systems (2f) and (2g) of equation (2), respectively. Graphs from the top to bottom show in each column the error on the variables x, y and
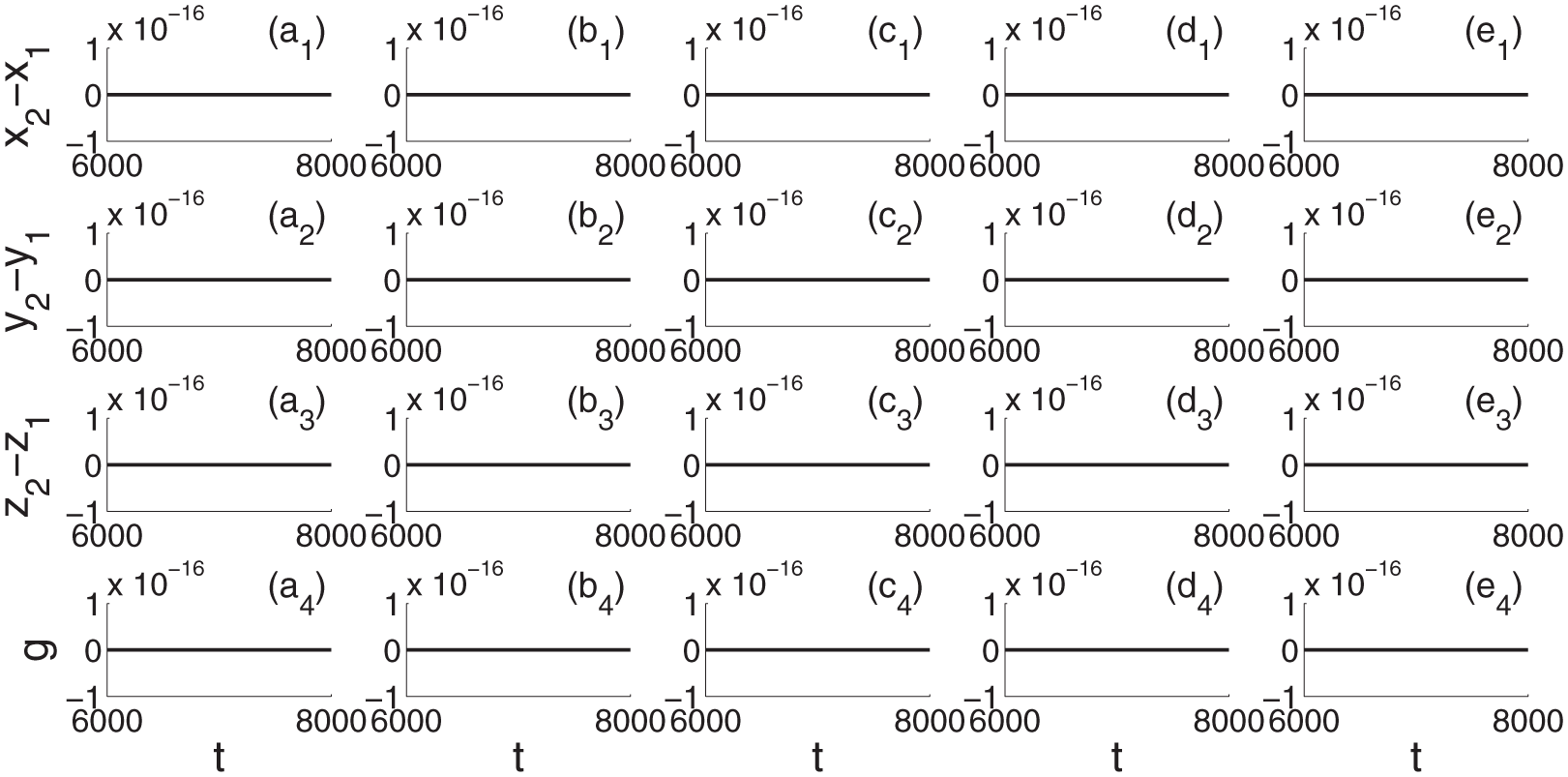
The closeness of synchronization error variables to the equilibrium point 0. Graphs on columns 1–5 represent the results for systems (2a)–(2e) of equation (2), respectively. Graphs from the top to bottom show in each column the error on the variables x, y and z and the sliding variable g, respectively. Note that the precision here is now of the order

The closeness of synchronization error variables to the equilibrium point 0 is reported. Graphs on columns 1 and 2 represent the results for systems (2f) and (2g) of equation (2), respectively. Graphs from the top to bottom show in each column the error on the variables x, y and
The last row of Table 2 displays values which confirm that the finite-time convergence was achieved. Each error system is obtained as
Synchronization time of error system with

Figure 6 presents the numerical results of equation (5) obtained with the controller of equation (8), the values in Table 2 and the response systems (2a)–(2d) of equation (2). Figure 8 presents the numerical results of equation (5) obtained using the controller of equation (8a), the values of Table 1 and systems (2f) and (2e) corresponding to the drive and response systems, respectively. The values of the controller used to plot the curves of Figure (8) are

Synchronization error variable versus dimensionless time t. Graphs on columns 1–4 represent the results for the drive system (2e) and the response system (2a)–(2d) of equation (2), respectively. Graphs from the top to bottom show in each column error on the variables x, y and z and the sliding variable g, respectively. The precision here is of the order

The closeness of synchronization error variable X to the equilibrium point 0. Graphs on columns 1–4 represent the results for the drive system (2e) and the response system (2a)–(2d) of equation (2), respectively. Graphs from the top to bottom show in each column error on the variables x, y and z and the sliding variable g, respectively. The precision here is of the order

Synchronization error variable versus dimensionless time t. Graphs (a)–(d) show the error on the variables x, y and z and the sliding variable g, respectively. Magnifications inside the boxes underline the occurrence of the chattering phenomenon at the precision of the order of
Remark 2
A variation of the controller values affects the accuracy of the error and the synchronization time of the dynamical error system. When these values increase, the synchronization time decreases proportionally, while the accuracy deteriorates due to the increase of the chattering amplitude.
Experimental results
The laboratory experimental setup was designed using different values of components (Figure 9) for the drive and response circuits to obtain the results of Figure 10. In Figure 9, the diodes are of type 1N4148 and the resistors are worth
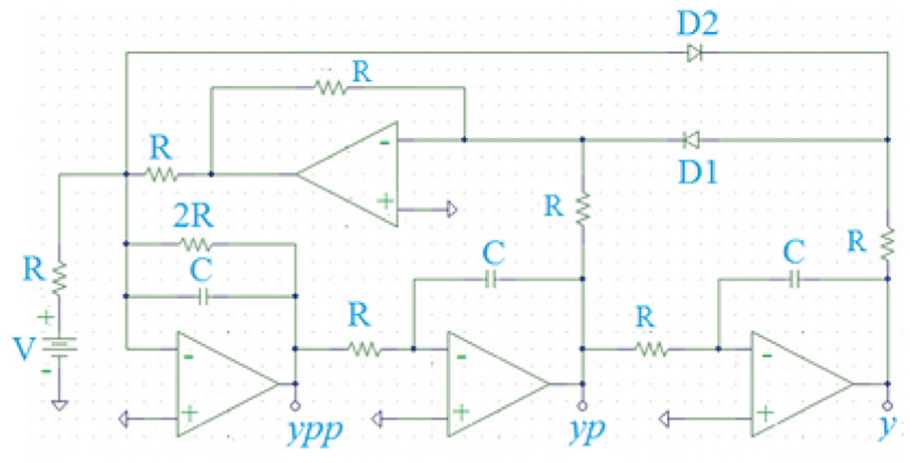
Chaotic circuit implementation of system (2a) of equation (2) using inverting op-amps (uA741). y, yp and ypp are the signals corresponding to the position, velocity and acceleration, respectively.

Experimental signals (a)
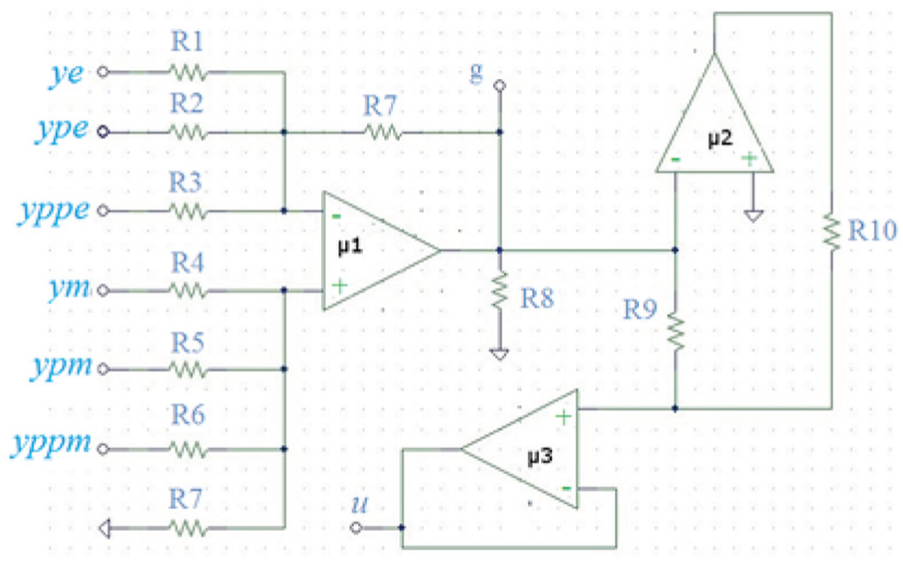
Analogue circuit implementation of the controller using op-amps polarized at

Experimental results of error signals from the controlled circuit: (a) signals ype versus ypm both measured at
Conclusion
In this article, the fast terminal time convergence is achieved for a class of jerk error systems with sigmoid nonlinear manifold. Few examples of systems with different types of parameters and nonlinearity are successfully synchronized for all state variables with the use of an implicit new variable with which third-order jerk dynamical equations could be transformed to a single first-order differential equation. A group of the Sprott circuits is also used for a practical device with good results to prove that the experimental setup of the proposed form of controllers can be designed using analogue components. It is then shown that the technique of using an implicit variable in the FTSM method can be generalized for any jerk circuits built with the same type of state components that has the form
Footnotes
Handling Editor: Yueying Wang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.