
Abstract
Air–fuel ratio is a key factor for the minimization of the harmful pollutant emissions and maximization of fuel economy. However, a big challenge for air–fuel ratio control is a large time-varying delay existing in spark ignition engines. In this article, a digital fuzzy sliding-mode controller is proposed to control a linear parameter-varying sampled-data air–fuel ratio system. First, the Pade first-order technique is utilized to approximate the time-varying delay. The resultant system—a linear parameter-varying continuous-time air–fuel ratio system with unstable internal dynamics—is then discretized to a linear parameter-varying sampled-data air–fuel ratio system appropriate for a discrete-time control approach. Based on the linear parameter-varying sampled-data air–fuel ratio system, a stable sliding surface with a desired tracking error dynamics is presented. Two input scaling factors and one output scaling factor are determined for the proposed digital fuzzy sliding-mode controller. Then, the fuzzy inference is executed through a look-up table to stabilize the sliding surface into a convex set, and then make the tracking error possess uniformly ultimately bounded performance. The overall system stability is verified by Lyapunov’s stability criteria. Finally, the simulation results demonstrate the feasibility, effectiveness, and robustness of the proposed control scheme under different operating conditions and show the superiority of the proposed approach performance compared to the baseline controller.
Keywords
Introduction
To address the environmental and economic concerns, many researches have been conducted to control air–fuel ratio (AFR) in internal combustion engines. In general, operation of spark ignition (SI) engines at a relatively high AFR value will result in both less fuel consumption and harmful emissions. In case of lean-burn engines, it takes a long and variable time delay for the air–fuel mixture to reach the universal exhaust gas oxygen (UEGO) sensor downstream of the lean NOx trap (LNT) module (Figure 1). 1 Besides, accurate modeling of the AFR dynamics is difficult, especially modeling of dynamics, such as combustion process and three-way catalytic converter is challenging and computationally expensive.2,3 Moreover, AFR dynamics is a large-scale system and highly nonlinear due to a series of reactions of air and fuel flows. Subsequently, the key challenges in the AFR control design are the inherently large time-varying delay and high nonlinearity in modeling. However, due to the advances in digital control systems, developing a digital control is more convenient than an analog control. Based on the above-mentioned reasons, developing a model-free-based digital controller with high-level robustness is needed for an efficient AFR control.

Schematic diagram of air–fuel path in a lean-burn engine. 1
Among many published papers on AFR control, only a few investigated the discrete-time approach; some representative research findings in the literatures are discussed here. In the study of Kahveci et al., 4 an internal model controller combined with an adaptive law in discrete-time was proposed for AFR regulation. Li and Yurkovich 5 presented a feedforward artificial neural network to approximate the system function in both AFR prediction and control. The control results were compared with a competing nonlinear sliding-mode controller. A cyclic transient characteristic of the air mass and the fuel mass with consideration of residual gas variation was represented in discrete-time and was then controlled by a proposed stochastic adaptive controller. 6 A linear quadratic (LQ) tracking controller was designed by Pace and Zhu 7 to optimally track the desired AFR by minimizing the error between the trapped in-cylinder air mass and the product of the desired AFR and fuel mass. Recently, a generalized predictive control (GPC) was proposed by Kumar and Shen 8 to achieve AFR control based on the cycle-to-cycle in-cylinder gas dynamic coupling model. Furthermore, total fuel mass, unreacted air, and residual burnt gas were estimated using the Kalman filter technique to calculate the in-cylinder AFR.
The presented literatures are all model-based controllers in discrete-time forms. Therefore, the performances depend on how exact their dynamic models are. However, recently, a finite time tracking control was proposed by Wang et al., 9 where they used an adaptive mechanism to learn the switched stochastic nonlinear uncertain system model and achieve the system performance although the nonlinear functions were completely unknown. Most papers on AFR control are based on the continuous time so it cannot be implemented by a microcontroller. For example, Ebrahimi et al.10,11 proposed a second-order sliding-mode technique and a parameter-varying filtered proportional–integral–derivative (PID) strategy for AFR control of SI engines. Zhang et al. 12 presented a linear parameter-varying (LPV) control for AFR control of a lean-burn SI engine where satisfactory stability and disturbance rejection performances are obtained in the face of the variable time delay. In the study of Kahveci et al. 13 and Rupp et al., 14 the adaptive internal model control (IMC) for AFR control was proposed to adapt unknown time constant of the system plant and internal model that effectively addresses the AFR system with time-varying delay to recover the performance and robustness properties. Moreover, based on an unstable internal dynamics, a linear dynamic parameter-varying sliding manifold was presented by Tafreshi et al. 1 to control AFR.
From a review of the above works, effectively developing a mode-free-based digital controller with a high-level robustness to deal with an AFR system with large and unknown time-varying delay is a major challenge. Hence, this article proposes a model-free controller that is capable of compensating for the high nonlinearity and complicated dynamics. Moreover, a high-level robustness is strongly in need so that the AFR system has enough capability for compensating unknown and bounded disturbances. To address these challenges, a digital fuzzy sliding-mode controller (DFSMC) scheme based on an LPV sampled-data AFR system is developed in this work to achieve AFR tracking control in the presence of external disturbances and uncertainty in system parameters. The proposed control strategy is capable of resolving the aforementioned issues. Contributions of this article can be summarized as follows:
Successfully constructing an LPV sampled-data AFR system based on an LPV continuous-time AFR system using Pade first-order approximation and discretization;
Effectively developing a model-free-based DFSMC with a high-level robustness to control the LPV sampled-data AFR system in the presence of external disturbances.
The article is organized as follows. An LPV sampled-data AFR system is represented and AFR control problem is formulated in section “LPV sampled-data AFR system and problem formulation.” In section “DFSMC design and stability proof,” the DFSMC design is described and its stability proof is given. Simulation results and discussions are presented in section “Simulation results and discussions.” Finally, in section “Conclusion,” some conclusions are made.
LPV sampled-data AFR system and problem formulation
In this section, first, a continuous-time AFR dynamics characterized by a time-varying delay is represented and its corresponding LPV sampled-data AFR system is derived by means of the Pade first-order approximation. Then, the AFR control problem is described.
Figure 1 depicts the typical lean-burn engine system including throttle, air path, fuel path, three-way catalyst (TWC), LNT, and UEGO sensor downstream the engine. AFR is determined by the air flow passing through the intake manifold and the fuel injected by the fueling system.
LPV sampled-data AFR system
A time-varying delay plays a key role in establishing the AFR dynamics in SI engines; besides, its large value brings another challenge for AFR tracking. The time-varying delay mainly consists of two parts: (1) cycle delay

where

where

where
Problem formulation
To take advantage of a model-free approach and achieve a high-level robustness, a DFSMC is proposed to control an LPV sampled-data AFR system with large time-varying delay and disturbances. Consider the LPV sampled-data AFR system in equation (3) as the system to be controlled. It is assumed that the external disturbances (

The proposed DFSMC configuration for an LPV sampled-data AFR system.
DFSMC design and stability proof
In this section, the DFSMC design for tracking the desired AFR is presented. The design is based on an LPV sampled-data AFR system under different operating conditions. The proposed DFSMC system stability is proved in this section.
DFSMC design
The AFR tracking error is defined as

To keep the sliding surface order low and to reduce the computational complexity, the sliding surface is designed as a dynamic form of the proportional and accumulative errors as equation (5) to substitute the proportional and difference errors

where

where
The fuzzy control algorithm has two inputs and one output. Figure 3 depicts the proposed fuzzy control block diagram that maps

The proposed fuzzy control block diagram.

Triangular membership functions.
Fuzzifier quantizes the crisp variables
Rule table of the proposed DFSMC.
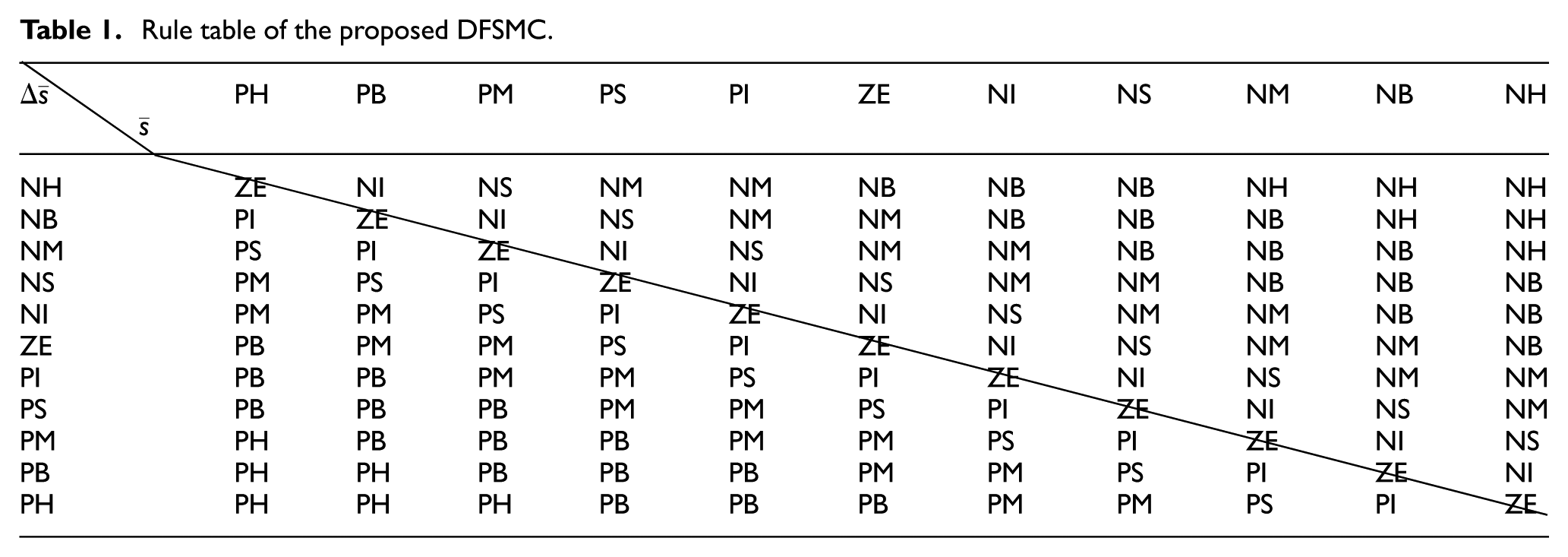
In terms of the rule base, the following l fuzzy control rules are employed in this article:

where the superscript i denotes the kth fuzzy rule;
In practice, the linguistic term should be converted to a non-fuzzy value. Thus, the linguistic rule in Table 1 is defuzzified by employing the center of gravity method to form a look-up table that directly relates the inputs
If
If
However, if
Look-up table of the proposed DFSMC.

In other words,
Based on the above-mentioned details, Table 2 can be summarized as

where

where

Generally speaking, choosing a larger output scaling factor
Theorem 1
Applying the DFSMC in equation (8) to the LPV sampled-data AFR system subjected to bounded external disturbances in equation (3) and satisfying the inequality in equation (9) show that
Stability proof
In the above section, the proposed DFSMC is applied to an LPV sampled-data AFR system. To prove the stability of the designed sliding surface (equation (5)), that is, Theorem 1, the positive discrete-time Lyapunov function is defined as

Then, the rate of increase of

where

Substituting equation (13) into equation (12) results in

Remark
The convex set
Based on the above Remark, as the sliding surface is outside of the convex set

Since
Finally, the procedure for the proposed DFSMC is summarized as follows:
Step 1. Design a stable sliding surface
Step 2. Calculate the difference in the sliding surface (equation (6)).
Step 3. Choose the input scaling factors (i.e.
Step 4. For the stability requirement, select an output scaling factor
Step 5. Repeat steps 1, 3, and 4 to adjust the control parameters
Simulation results and discussions
To verify the effectiveness, robustness, and performance of the proposed DFSMC scheme, the simulations under different operating conditions were performed. The physical parameters of a continuous-time AFR dynamic model and suitable control parameters of the proposed DFSMC were considered as
First, the proposed DFSMC (equation (8)) was applied to the LPV sampled-data AFR system with external periodic disturbances modeled in equation (3). Figure 5 displays the output tracking and its corresponding control input. One can see that the response (c.f. Figure 5(a)) has larger transient response at larger time. The reason is that the injected time delay increases over time in the simulation. From the phenomenon, it is known that a larger time delay indeed degrades the system performance since the AFR system has a drastic transient response at the turning command. It is worth noting that the control input shown in Figure 5(b) is small that is advantageous to save power energy for the proposed DFSMC. In addition, system modeling often includes unmodeled dynamics and parameter uncertainties. To further evaluate the extent of the robustness of the proposed control scheme, the UEGO time constant was changed by 20% more and less based on the nominal value. The responses are, respectively, shown in Figure 6(a) and (b). It can be seen that these responses are satisfactory despite the uncertainties in time constant.

Responses of the proposed DFSMC applied to the LPV sampled-data AFR system with external disturbances: (a) output tracking and (b) corresponding control input.

Responses for (a) 20% increase and (b) 20% decrease in time constant under the same conditions as Figure 5.
To examine the effect of a sudden disturbance to the system, in addition to having a 20% increase and a 20% decrease in time constant, a pulse disturbance with a normalized AFR value, 0.6, is considered in the LPV sampled-data AFR system at 50 s. Figure 7 reveals that the proposed DFSMC possesses fast response and high-level robustness, even in the presence of uncertainty, disturbances, and pulse disturbance.

Responses for (a) 20% increase and (b) 20% decrease in time constant plus pulse disturbance under the same conditions as Figure 5.
In order to apply the proposed strategy in a practical setting, investigating the effect of saturation in control input is necessary. According to Figure 5(b), a maximum control input, 1.5 (AFR), is chosen to examine the effect of an input saturation. Theoretically speaking, as the system is subjected to input saturation, the system response usually has larger transient response and becomes sluggish. However, comparing Figure 7(a) with Figure 8(a) reveals that the response of Figure 8(a) is even smaller than that of Figure 7(a) in both undershoot and overshoot at 20 and 60 s. The caused reason is that the undershoot and overshoot responses in Figure 8(a) are suppressed as the control input value shown in Figure 5(b) is in excess of 1.5 only at 20 and 60 s. In addition, to validate the superiority of the proposed control scheme, comparison with a common controller is required. Here, the compared baseline controller is a PI controller that is often designed in industry. The comparative response is shown in Figure 9. It is clear that the proposed DFSMC outperforms the baseline controller in speed of response. Finally, to fully understand the state trajectory, the phase plane is shown in Figure 10 which indicates that the desired AFR is 1 during the first half simulation time and 1.4 after the second half time. The total simulation time is 100 s.

Responses for (a) 20% increase and (b) 20% decrease in time constant pulse disturbance and saturation.

Comparing the PI controller with the proposed DFSMC with (a) 20% increase and (b) 20% decrease in time constant under the same conditions as Figure 8.
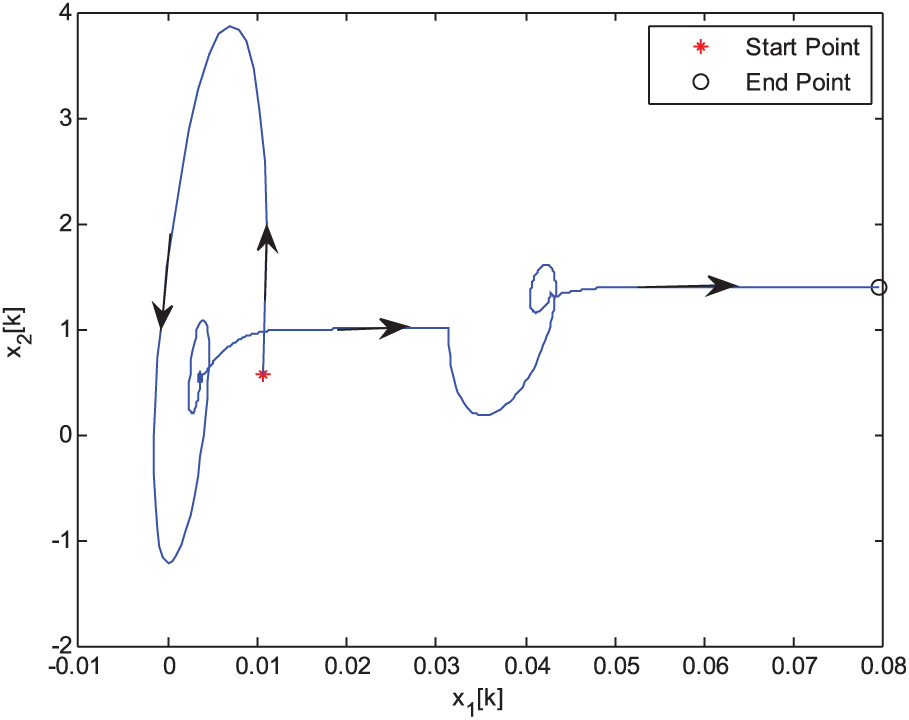
State trajectory in the phase plane (
Conclusion
A continuous-time AFR system existing with a large time-varying delay is built up. Subsequently, an LPV sampled-data AFR system is developed for the discrete-time control model by means of the first-order Pade approximation and discretization. Based on the LPV sampled-data AFR system, a DFSMC is proposed for the tracking control of desired AFR. The proposed DFSMC benefits from being model-free and having a high-level robustness feature. The closed-loop system stability is assured via Lyapunov’s stability criteria. Finally, the simulation results show that the proposed DFSMC not only demonstrates satisfactory performance despite the presence of disturbances, uncertainty, and saturation but also is superior to the baseline controller compared to a PI controller. In conclusion, it is shown that the proposed DFSMC indeed possess a high-level robustness and high performance based on simulation results and the stability proof.
Footnotes
Handling Editor: Long Cheng
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by NPRP grant from the Qatar National Research Fund (a member of Qatar Foundation; grant no/ 7-829-2-308).