
Abstract
It is difficult for the traditional methods to identify uncertain damage problems caused by noise. Therefore, a gray cloud rule generator algorithm based on cloud model and modal strain energy is presented to solve the problems. Cloud model can simulate both randomness and fuzziness with fixed parameters. Therefore, it is applicable for the uncertain damage problems. First, modal strain energy and modal strain energy dissipation ratio index are introduced. Then, numerical characteristics of a cloud model are described and some cloud generators are analyzed. Finally, a gray cloud rule is proposed and the gray cloud rule generator algorithm based on the gray cloud rule generator and modal strain energy is developed. The interference of uncertain noise is reduced through a large number of cloud droplets. A two-dimensional truss structure model has been used to verify the effectiveness of the algorithm. The results indicate that the proposed gray cloud rule generator algorithm is applicable to identify the uncertain damage caused by noise, and the identification results of the proposed method are relatively better than those of modal strain energy dissipation ratio index.
Introduction
In the past two decades, the security of building structures has received increasing concern, especially in the damage detection for the structure itself. As a result of the structural damage, the local rigidity of the structure will descend while the modal parameters change. Most of the researchers make the damage detection analysis based on modal parameters and structural dynamic responses. 1 Therefore, structural damage identification is based on changes in dynamic characteristics of a structure to localize the damage zones and estimate the extent of damage. Generally, the structural damage identification methods can be divided into deterministic and uncertain methods. The deterministic method is relatively a traditional and conventional method, for example, the method based on structural vibration measurement. Most deterministic damage identification studies directly focus on dynamic characteristics obtained from dynamic tests. However, the uncertain damage identification method based on probability and statistics focus on the nature of uncertainty of the damage problems 2 such as structural damage detection following the Bayesian approach and the statistics theory. 3 It is still necessary to utilize dynamic characteristics in the uncertain damage identification method.
Dynamic characteristics include natural frequencies, mode shapes, modal strain energy (MSE), and so on. They have been widely used in structural damage detection. 4 Salawu 5 identified structural damage through frequency changes. Chaudhari and Maiti 6 proposed a numerical method for determining the location of a crack in a beam with varying depth by considering the three lowest natural frequencies of the cracked beam. Zhang et al. 7 identified the delamination damage of composite beams using natural frequencies. Koh and Dyke 8 used modal correlation to detect the damage of a suspension bridge. Shi et al. 9 presented a modal strain energy change ratio (MSECR) for structural damage localization analysis by the modal displacement change before and after damage. Fan and Qiao 10 detected the damage of the plate structures using the wavelet transform of structural vibration mode and modal shape, and obtained good results. Sazonov and Klinkhachorn 11 studied vibration-based methods for nondestructive damage detection by utilizing curvature and strain energy mode shapes. Liu et al. 12 reported a modal strain energy dissipation ratio index (MSEDRI), which can approximately detect the locations of damage and the severity of damage. Seyedpoor 13 proposed a two-stage damage detection method based on MSE and particle swarm optimization. However, it is difficult for these traditional methods to solve the uncertain damage problem caused by measurement noise. Some robust methods were also developed to identify structural damage. Nobahari et al. 14 presented an echolocation search algorithm to detect the site and extent of multiple damage cases in structural systems. We will also develop a new method to deal with uncertain damage problems.
Cloud model is a new cognitive model that can synthetically describe the fuzziness and randomness of concepts and implement the uncertain transformation between the qualitative concepts and the quantitative description.15–17 It is applicable to uncertain damage identification problems. In statistics, probability distributions can be used to model the uncertainty of variables representing random phenomenon known as randomness. In fuzzy mathematics, the membership function is used to model the uncertainty of membership to fuzzy concepts known as fuzziness. Both randomness and fuzziness can be modeled by a cloud model with fixed parameters. Cloud models have been widely used in information sciences, including eutrophication assessment of water, intelligent control, and image segmentation.18–20 The cloud model and the cloud generator can realize the transformation between the qualitative concept and the quantitative value. Therefore, a damage detection method based on the cloud model and the cloud generator was proposed to solve uncertain damage problems caused by noise.
Herein, we propose a gray cloud rule generator algorithm (GCRGA) based on a gray cloud model and condition cloud generators to identify structural damage. This article has six sections. Section “MSE” briefly describes the MSE and MSEDRI. Section “Cloud model and cloud generators” introduces the numerical characteristics of a cloud model, the normal and backward cloud generators. Section “Damage identification based on cloud rule generator” presents the GCRGA based on the gray cloud model and the condition cloud generator. Section “Numerical experiment” provides numerical examples. Finally, section “Conclusion” reports the conclusions of this study.
MSE
Structural damage will change the mass, stiffness, and damping properties of a structure, thus leading to the change of structural frequency and vibration mode. Therefore, various methods have been introduced to identify the damage in structures based on comparing the response data of the structure before and after damage. One of the most popular methods is the one based on using the strain energy of a structure. Assuming that a structure is divided into N elements, the MSE of the jth element and the ith mode before and after the occurrence of damage is expressed as follows


where


Liu et al. 12 further developed an MSE method to identify the structural damage, which is named as MSEDRI. The damage coefficient of the jth element can be expressed as

Cloud model and cloud generators
Cloud model
Generally, probability theory can be used to deal with randomness. The normal distribution can be used to approximate a large number of random phenomena. The normal membership function is widely used to describe the fuzzy concept. Thus, Li et al. 21 proposed a normal cloud model to integrate the uncertainty processing advantages of the normal distribution and the membership function. In the cloud model, three numerical characteristics are used to describe the information uncertainty, which are Expectation (Ex), Entropy (En), and Hyper Entropy (He). The detailed descriptions are as follows:
Ex: a point that can represent the qualitative concept to the maximal degree in the universe. It is also the center position of gravity of the cloud.
En: the discrete degree of the cloud droplet that represents the qualitative concept reflected by this numerical characteristic, and it shows the connection between randomness and fuzziness.
He: this represents the measurement of the entropy. In other words, it is the entropy of the entropy. This numerical characteristic reflects the extent of uncertain aggregation of all the points that contribute to the qualitative concept in quantitative universe and the magnitude of the randomness in the degree of certainty.
In summary, the fuzziness and randomness are combined with three numerical characteristics, and the mutual mapping between the qualitative concept and quantitative value is shown. In this study, the three numerical characteristics are used to construct a normal cloud generator to achieve the transformation between the qualitative concept and quantitative value. The numerical characteristics of cloud model are shown in Figure 1.
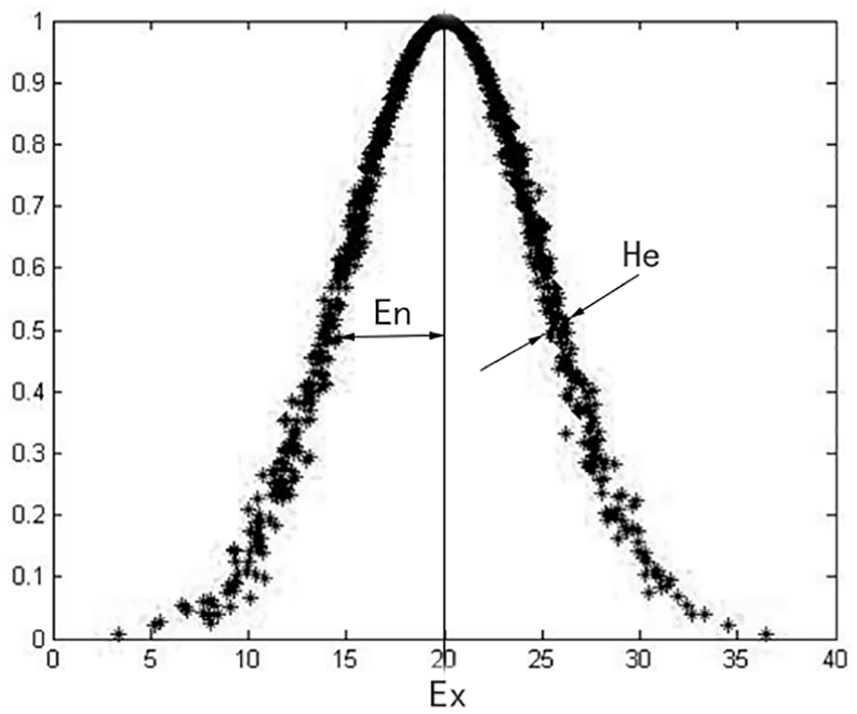
Numerical characteristics of cloud model.
Cloud generators
Cloud generators can be divided into normal and backward cloud generators. The position coordinate of a cloud droplet in the universe can be obtained in the quantitative and qualitative aspect by inputting the three numerical characteristics (Ex, En, and He), and the quantity of cloud droplets should be generated in the normal cloud generator. Similarly, the backward cloud generator is the inverse of the normal cloud generator. The normal cloud generator algorithm can be formulated as follows: 19
Generate a normal random number Xr according to the three numerical characteristics (Ex, En, and He). The expectation of Xr is Ex and the standard deviation is En.
Generate a normal random number En′, where the expectation is En and the standard deviation is He.
Generate a cloud droplet (xr,µr) by
Repeat the above procedure until N cloud droplets are generated.
If the fluctuation range of the testing data is unknown, the cloud model can be established by a backward cloud generator at the sampling discrete testing level. The statistical parameters can be expressed as follows



where



where N is the total number of testing samples. The normal and backward cloud generators are shown in Figure 2. Cloud generators are very useful for solving uncertain reasoning problems.

Normal and backward cloud generators.
Damage identification based on cloud rule generator
Cloud rule generator
The normal cloud generators can be further divided into the X- and Y-condition cloud generators. Given three digital characteristics Ex, En, and He and a particular number x0, the generator can produce the cloud droplet (x0,μr). This kind of generator is called the X-condition cloud generator. The certainty can be calculated by

By contrast, given the three digital characteristics and a certainty μ0, the generator can produce cloud droplet (xr,μ0). This kind of generator is called the Y-condition cloud generator. The value

A qualitative rule can be described as if (a) then (b), only the single condition and the single rule generator are discussed here. The cloud rule generator algorithm is listed as follows. The detailed procedure is given below:
Generate a normal random number
Calculate the certainty by
Generate a normal random number
If
If
From the above texts, we can know that the degree of uncertainty can be passed on by cloud generators. First, a quantitative value xa is input into the X-condition cloud generator, then we can get the certainty µ by the cloud generator. Finally, the certainty µ is input into the Y-condition cloud generator then a quantitative value xb is obtained.
Damage identification based on gray cloud rule generator
The cloud rule generator algorithm and gray cloud model will be used in this method. MSE with a random error is considered as dynamic parameters. Multicondition rules will be used in the cloud rule generator. The damage information can be obtained from the cloud reasoning. The steps are as follows:
1. Suppose damage patterns or levels. Here, s damage patterns are established: [c1,c2], [c2,c3], ……, [cs, cs + 1], in which ci (i = 1, 2, …, s + 1) is the boundary. s damage patterns can be processed by s condition rule generators. Based on the finite element model and damage patterns, we can obtain some gray cloud numerical characteristics of damage levels and their MSE. Then, a gray cloud model is proposed to calculate the numerical characteristics of each damage pattern. The numerical characteristics of the gray cloud include peak (Cs), left boundary (Ls), right boundary (Rs), Entropy (En), and Hyper Entropy (He). The peak (Cs), Entropy (En), and Hyper Entropy (He) are given by



where k is dispersion of gray cloud entropy.
2. To avoid the unreliable detection results, lots of measurement data with random noise are used to identify the structural damage. The X-condition cloud generator is used to calculate the certainty value of cloud droplets under the s damage patterns.
3. Then, the Y-condition cloud generator is further used to calculate the damage value of cloud droplets under the s damage patterns. n cloud droplets can be produced based on the calculated value of certainty for each damage pattern.
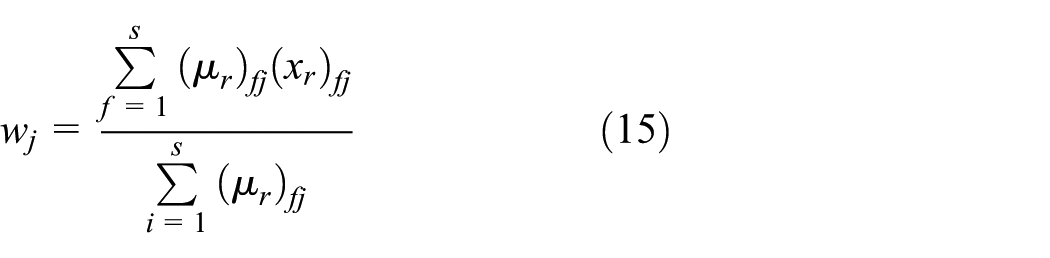
4. In the cloud generator, many cloud droplets are produced with their certainty as ((xr) f , (μr) f ), where (xr) f is the quantitative output value of droplet in the fth rule activated and (μr) f is the certainty of droplet in the fth rule. According to the weighting average theory, a multipattern weighting method is proposed. Thus, the value of the cloud droplet of the jth element can be written as
5. Finally, calculate the damage information through the average method. If measurement data of m tests are considered and n weighted cloud droplets for every time are produced, the mean index of the jth element is given by

The proposed method is named as GCRGA in this article.
Numerical experiment
To investigate the effectiveness of the proposed method, a 31-bar truss structure13,14 is used. The size of the similar truss structure is shown in Figure 3. The material properties of the structure are as follows: ρ = 2800 kg/m3, E = 72 GPa, and A = 0.001 m2. The truss model consists of 31 bar elements, 14 nodes, and 25 degrees of freedom. The damage is simulated by a reduction in the stiffness of individual bars in the structure. The damage cases are shown in Table 1. The parameters of the gray cloud rule generator are as follows: damage patterns s = 7; boundary values are 0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6 and 0.7; measurement times m = 20; dispersion of gray cloud entropy k = 0.1; and the number of cloud droplets generated for each pattern n = 100. The machine used for this research is a personal computer with an Intel i3-2120 3.30 GHz processor and a 4 GB memory. The operating system is Microsoft Windows XP. Mode shapes with random noise are used to form MSE. The first three mode shapes with complete mode data are applied to identify structural damage.
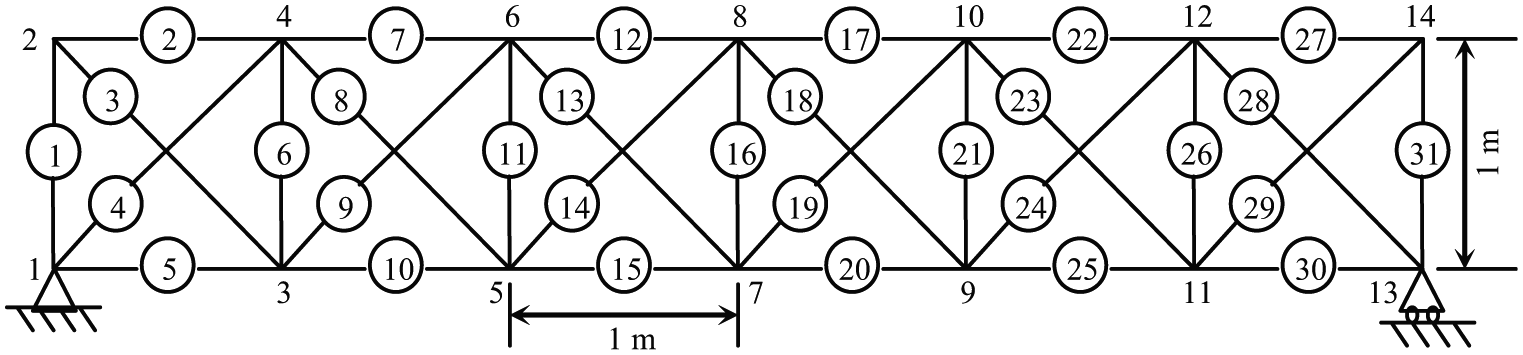
Two-dimensional truss structure.
Damage cases for two-dimensional truss.

Generally, random measurement noise will cause an uncertain problem. Here, random measurement noise is considered and artificial noise is added into the mode data according to Udwadia’s method 23

where
To avoid the unreliable detection results, measurement data of 20 times with random noise is utilized to identify the structural damage. A cloud rule generator based on gray model and MSE is applied to solve the uncertain problem caused by noise. To compare different damage detection methods, the MSECR 9 and MSEDRI 12 are also considered. The first three mode shapes with random noise are used to calculate the MSE.
The rule base of cloud rule generator is formulated. Suppose that the generator is composed of seven qualitative concepts: Damage pattern 1 to Damage pattern 7 Multiple damage patterns can deal with the uncertainties caused by random noise. Each digital characteristic of qualitative concept calculated by the gray cloud model is listed in Table 2.
Digital characteristics of qualitative concept in variable patterns.

Then, the gray cloud digital characteristic of MSE can be calculated by MATLAB software. Table 3 is the canonical matrix formulated by expectation of damaged MSE in variable degrees of damage. Entropy of MSE is also necessary to formulate the cloud model, which is shown in Table 4. And, the Hyper Entropy of damaged MSE is one-tenth of entropy according to the gray cloud model. Thus, the qualitative rule base between MSE and damage value based on damage patterns of two-dimensional truss is formulated. The X- and Y-condition cloud generators will use the qualitative rule base between MSE and damage: if Ats, then Bts, t = 1, 2, …, 31, s = 1, 2, 3, 4, 5, 6, 7.
Gray cloud expectation of MSE in variable patterns.
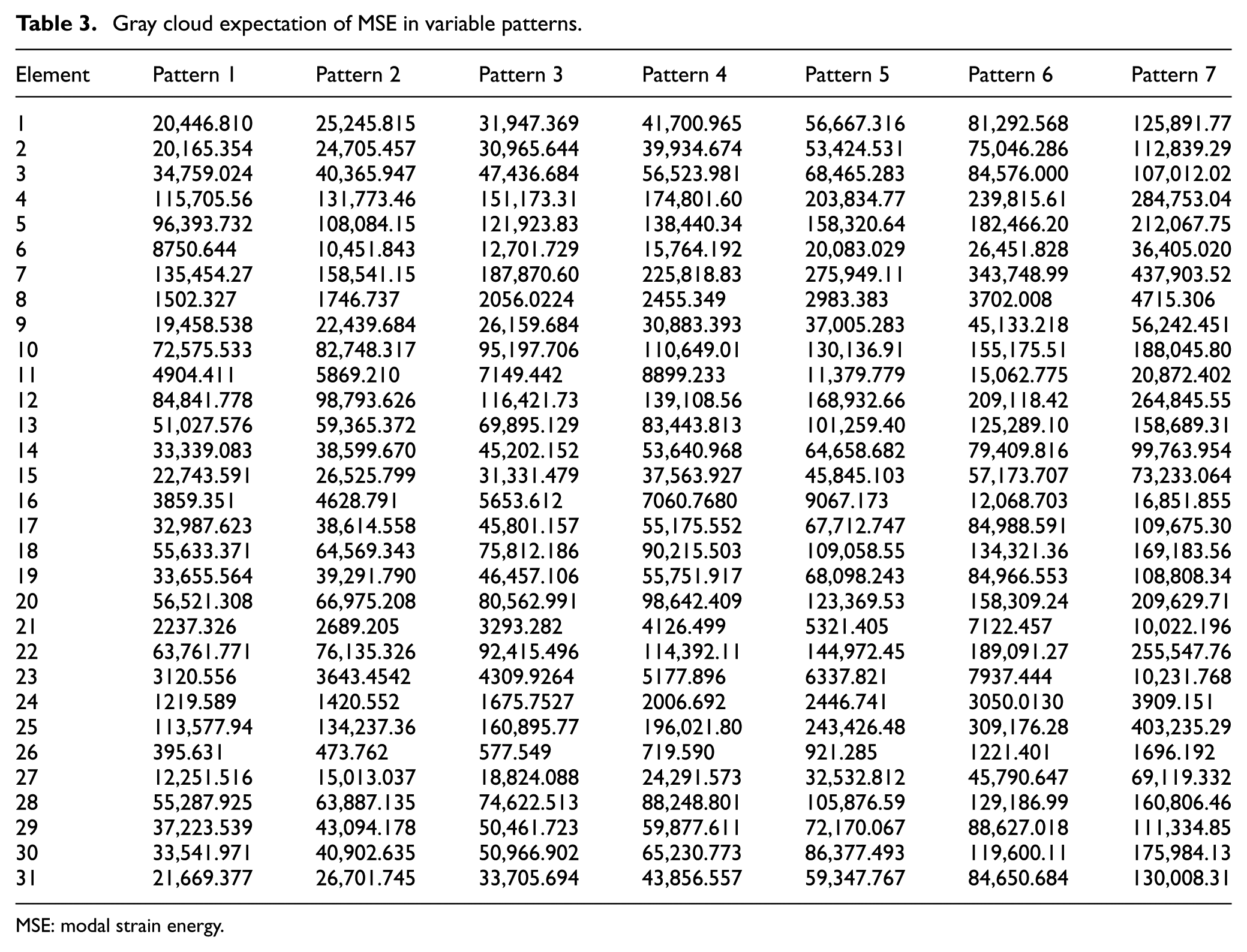
MSE: modal strain energy.
Gray cloud entropy of damaged MSE in variable patterns.

MSE: modal strain energy.
Case 1
In this case, elements 2, 15, and 21 have 30%, 30%, and 20% stiffness damage, respectively. The calculation procedures of the GCRGA are briefly shown as follows: first, the MSE are calculated using the measured modal shape. Then, the X- and Y-condition cloud generators are used to produce cloud droplets with different damage patterns. Finally, the weighting average method based on certainty is used to obtain damage information.
The MSECR, MSEDRI, and GCRGA are used to identify structural damage. The identification results of three kinds of methods are shown in Figure 4. From Figure 4, it can be observed that the MSECR, MSEDRI, and GCRGA can identify the damage locations. The values of damaged elements are further listed in Table 5. From Table 5, it can be seen that the identification precision of the proposed GCRGA is relatively better than those of the MSECR and MSEDRI when measurement noise is not considered. The MSECR hardly identifies the damage extent.
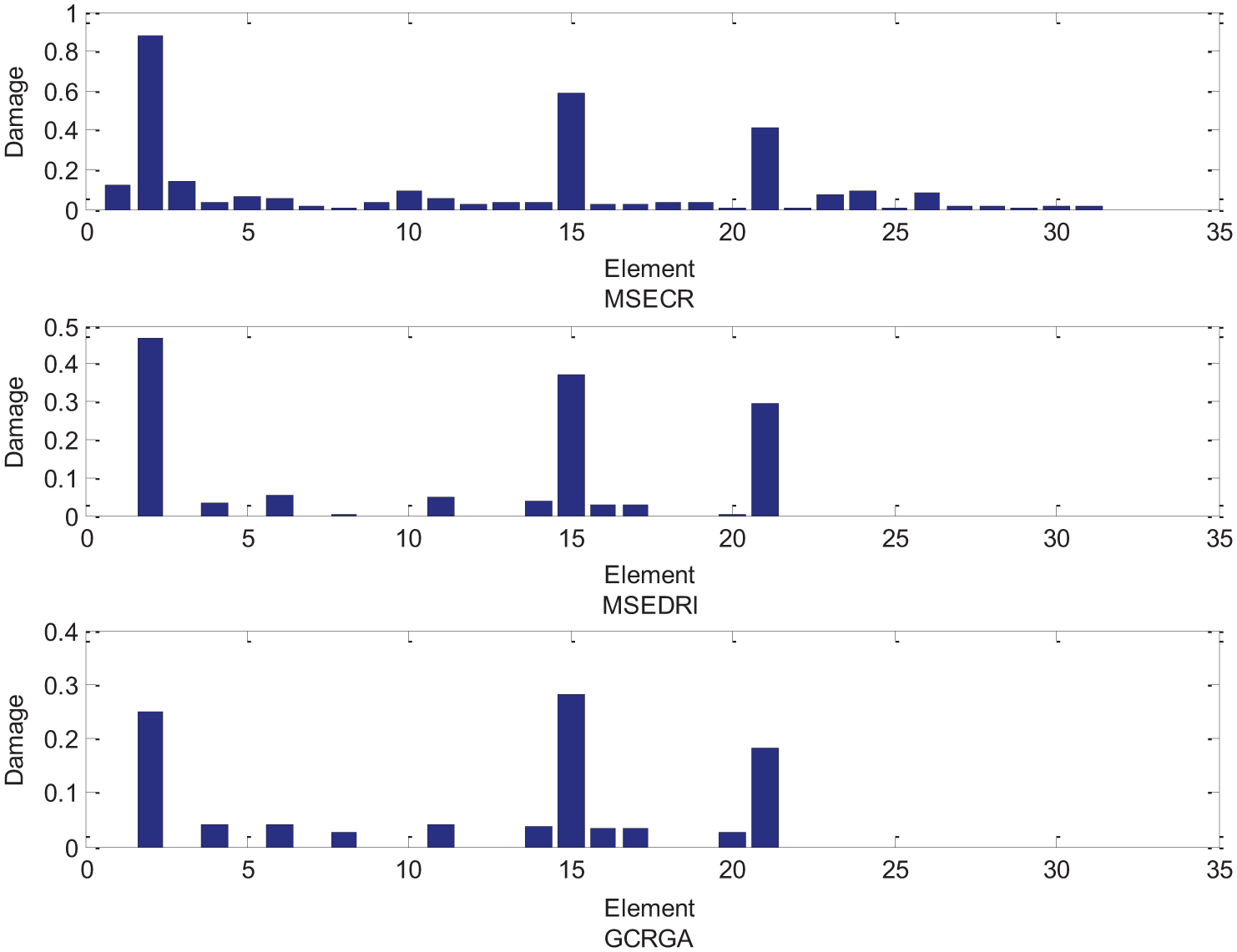
Identification results of three kinds of methods when damage occurs in elements 2, 15, and 21.
Calculation results of damaged elements for case 1.

MSECR: modal strain energy change ratio; MSEDRI: modal strain energy dissipation ratio index; GCRGA: gray cloud rule generator algorithm.
However, the measurement noise is inevitable. Here, measurement data of 20 tests with random noise are used to identify structural damage. The identification results of three kinds of methods are shown in Figure 5. An element with a relatively higher value indicates that it is more probable to be the true damage element. The run times of the MSECR, MSEDRI, and GCRGA are 2.1, 2.3, and 7.7 s, respectively. Figure 5 shows that neither the MSECR nor the MSEDRI can find the true damage locations, and the value of element 26 is obviously higher than those of the other elements. In addition, Figure 5 shows that GCRGA can identify the true damage locations even if the noise disturbance is considered. The mean values of damaged elements are higher than those of undamaged elements. Therefore, the GCRGA can approximately identify damage locations when measurement noise is considered.
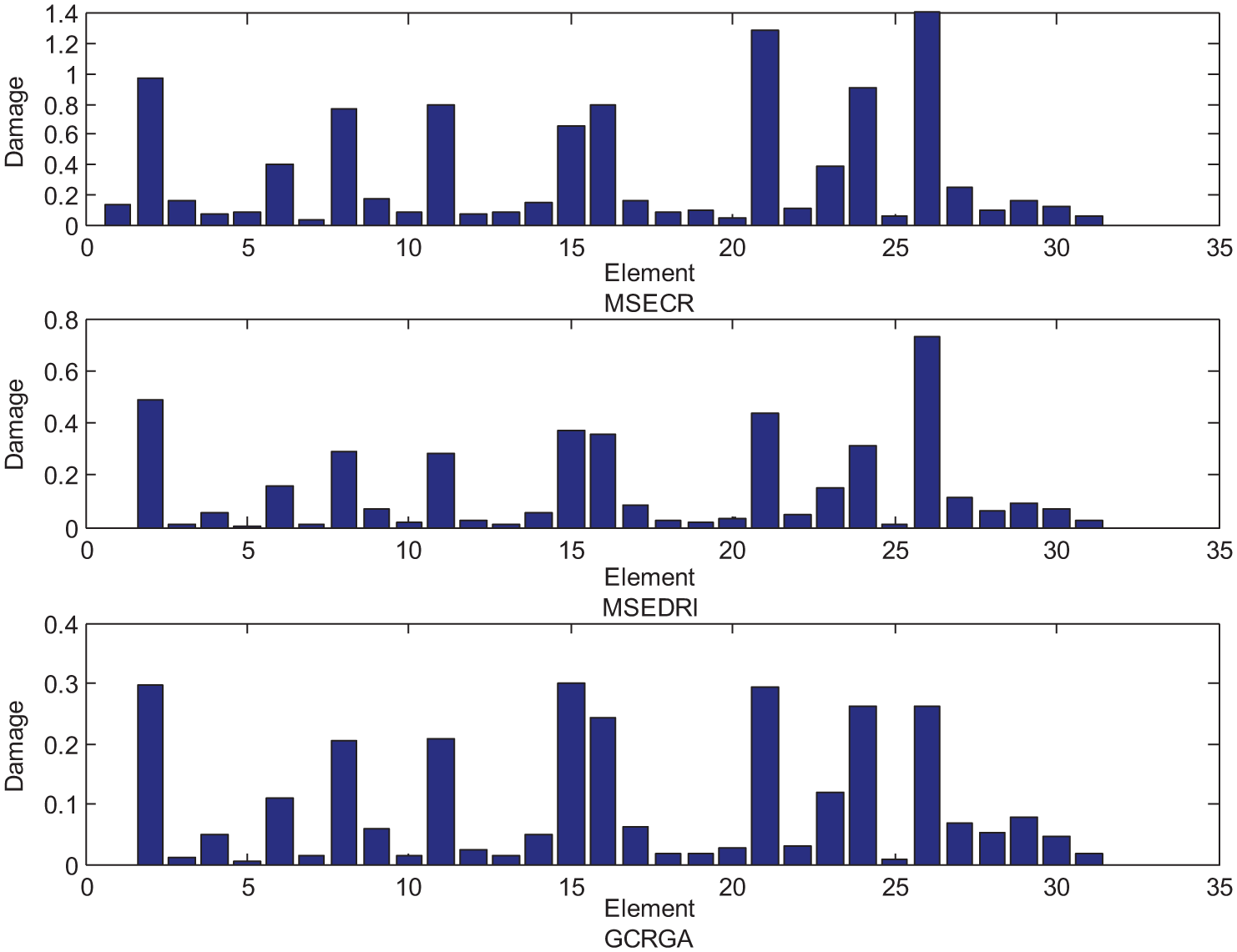
Identification results with mean value of three kinds of methods when damage occurs in elements 2, 15, and 21 (considering 3% noise).
The involved damage patterns and the membership cloud of GCRGA are shown in Figures 6 –8. Here, the patterns and cloud droplets of damaged elements 2, 15, and 21 are mainly considered. Figures 6 –8 show that multiple damage patterns are involved in damage detection. Due to the existence of measurement noise, some cloud drops often deviate from the true damage patterns. Therefore, multiple damage patterns are involved. Here, a large number of cloud droplets are used to reduce the noise interference.
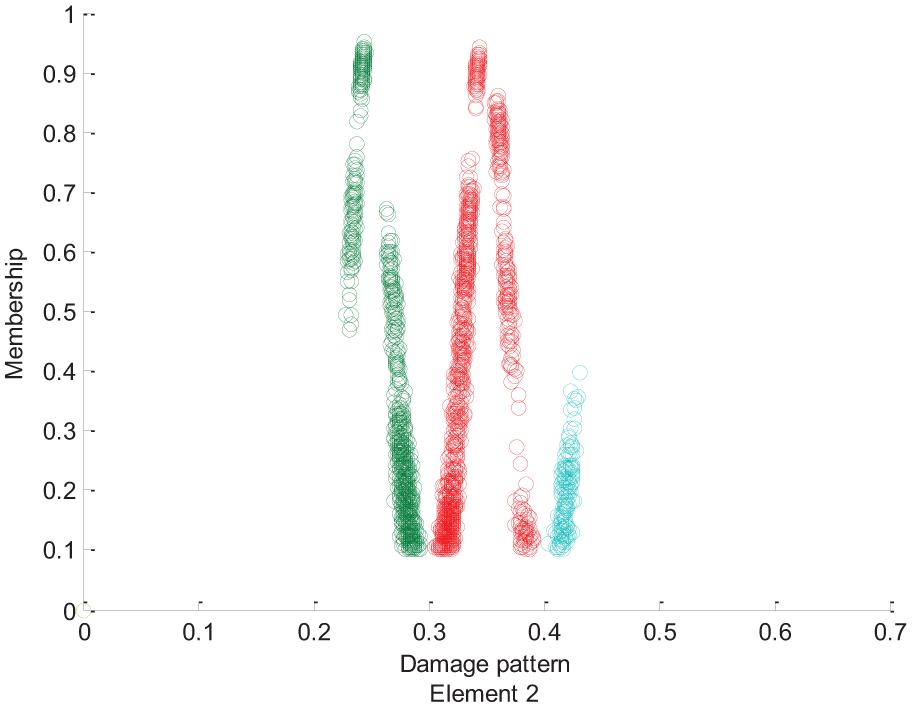
Membership cloud and damage patterns of element 2 for case 1 (3% noise).

Membership cloud and damage patterns of element 15 for case 1 (3% noise).

Membership cloud and damage patterns of element 21 for case 1 (3% noise).
Probability theory can be used to deal with randomness. The normal distribution can be used to approximate a large number of random phenomena. In fuzzy mathematics, the membership function is used to model the fuzziness. Cloud model can model both randomness and fuzziness with fixed parameters (Entropy (En) and Hyper Entropy (He)). The comparison results of En and He between MSEDRI and GCRGA are listed in Table 6. From Table 6, we can see that the randomness and fuzziness of the GCRGA are less than those of the MSEDRI. Therefore, the GCRGA is relatively better than the MSEDRI.
Comparison results of damaged elements between MSEDRI and GCRGA for case 1 (3% noise).

GCRGA: gray cloud rule generator algorithm; MSEDRI: modal strain energy dissipation ratio index.
Case 2
In this case, elements 5, 8, and 24 have 25%, 20%, and 25% stiffness damage, respectively. The MSECR, MSEDRI, and GCRGA are used to identify the damage. The identification results of three kinds of methods are shown in Figure 9. From Figure 9, we can observe that the MSECR, MSEDRI, and GCRGA can identify the damage locations. The calculation values of damaged elements are listed in Table 7. From Table 7, we can see that the identification precision of the proposed GCRGA is still better than those of the MSECR and MSEDRI when measurement noise is not considered. The MSECR hardly identifies the damage extent.

Identification results of three kinds of methods when damage occurs in elements 5, 8, and 24.
Calculation results of damaged elements for case 2.

MSECR: modal strain energy change ratio; MSEDRI: modal strain energy dissipation ratio index; GCRGA: gray cloud rule generator algorithm.
Measurement noise must be considered. Here, measurement data of 20 tests with random noise are used to identify structural damage. The identification results of three kinds of methods are shown in Figure 10. The run times of the MSECR, MSEDRI, and GCRGA are 2.2, 2.5, and 8.6 s. Figure 10 shows that neither the MSECR nor the MSEDRI can find the true damage locations. Elements 21 and 26 have relatively higher values, but they are not the true damaged elements. Figure 10 also shows that the GCRGA can obviously identify the true damage locations even if the noise disturbance is considered. The mean values of damaged elements are higher than those of undamaged elements. Therefore, the GCRGA is the best one of the three methods.

Identification results with mean value of three kinds of methods when damage occurs in elements 5, 8, and 24 (considering 3% noise).
And, 5% noise is also considered. The identification results with 5% noise are shown in Figure 11. The run times of the MSECR, MSEDRI, and GCRGA are 2.5, 2.6, and 8.7 s. Figure 11 shows that neither the MSECR nor the MSEDRI can find the true damage locations. Elements 16, 21, and 26 have relatively higher values, but they are not the true damaged elements. Figure 11 also shows that the GCRGA can approximately find the true damage locations even if the noise disturbance is considered. The mean values of damaged elements are higher than those of undamaged elements. Therefore, the GCRGA can approximately identify damage locations when measurement noise is considered.
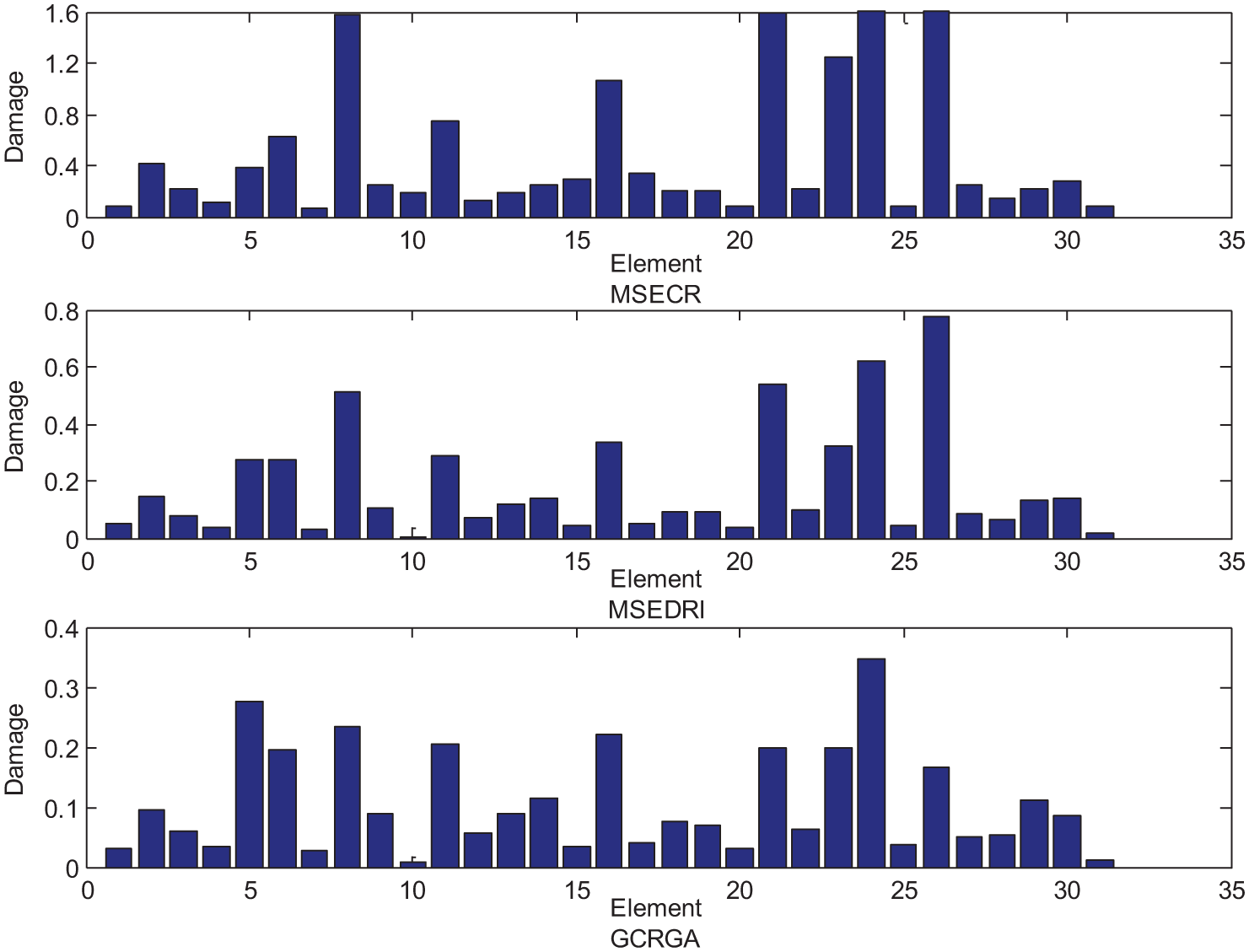
Identification results with mean value of three kinds of methods when damage occurs in elements 5, 8, and 24 (considering 5% noise).
The membership cloud and damage patterns of GCRGA are shown in Figures 12 –14. Here, the involved patterns and cloud droplets of damaged elements 5, 8, and 24 are mainly considered. Figures 12 –14 show that multiple damage patterns are integrated to identify the damage. Due to the existence of measurement noise, some cloud drops often deviate from the true damage patterns. Therefore, multiple damage patterns are involved. Here, a large number of cloud droplets are produced to avoid a large deviation from the actual damage. The gray cloud rule generator and the multipattern weighting method are also used to deal with the uncertain problems caused by noise. Therefore, the GCRGA can solve the uncertain damage problems. Cloud model can model both randomness and fuzziness with fixed parameters (Entropy (En) and Hyper Entropy (He)). The comparison results of En and He between MSEDRI and GCRGA are listed in Table 8. From Table 8, we can see that the randomness and fuzziness of the GCRGA are less than those of the MSEDRI. Therefore, the GCRGA is relatively superior to the MSEDRI.
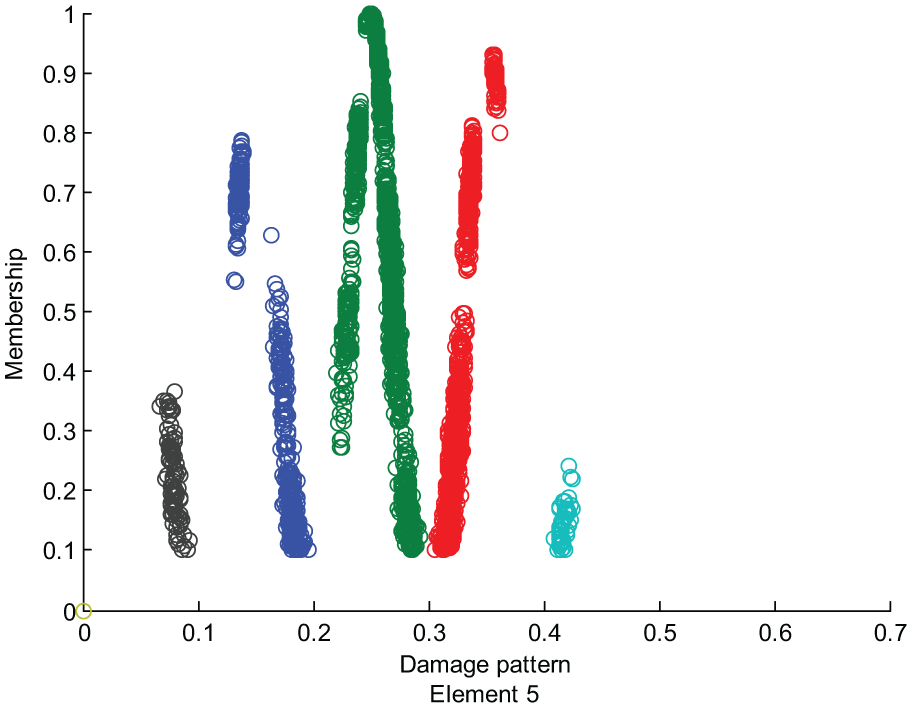
Membership cloud and damage patterns of element 5 for case 2 (3% noise).

Membership cloud and damage patterns of element 8 for case 2 (3% noise).

Membership cloud and damage patterns of element 24 for case 2 (3% noise).
Comparison results of damaged elements between MSEDRI and GCRGA for case 2.

GCRGA: gray cloud rule generator algorithm; MSEDRI: modal strain energy dissipation ratio index.
In the mentioned earlier, we can see that it is difficult for the MSECR and MSEDRI to deal with the uncertain damage problems caused by random measurement noise. Therefore, the GCRGA is proposed to determine these uncertain factors. Both the cases show that the GCRGA not only identifies the true damage locations but also reduces the measurement noise disturbance. The identification results of the GCRGA are relatively better than those of the MSECR and MSEDRI. Therefore, the GCRGA improves the reliability and effectiveness of identification results.
Conclusion
A damage identification method based on the gray cloud rule generator and MSE is developed to identify structural damage. The GCRGA utilized the X- and Y-condition cloud generators to improve the identification reliability and produce cloud droplets. Due to the existence of measurement noise, many cloud drops often deviate from the true damage patterns. Therefore, multiple damage patterns are involved in the calculation procedure. Here, a large number of cloud droplets are used to reduce the interference of noise. Finally, a weighting method is used to obtain uncertain damage information. Considering the identification results of the numerical examples, the following conclusion can be drawn: (1) the quantification results of the proposed GCRGA are better than those of MSECR and MSEDRI if measurement noise is not considered. (2) The localization results of the GCRGA are still relatively superior to those of MSECR and MSEDRI if measurement noise is considered. Therefore, the proposed GCRGA can identify the uncertain damage problems caused by measurement noise. The identification principle of the proposed GCRGA is applicable for other types of structures. Therefore, the method should be able to identify other types of structures. In general, the changes of dynamic characteristics caused by small damage are easily submerged in the noise. Therefore, for small damage, the miss probability will be higher. In addition, the better the measuring accuracy of sensor is, the less the miss probability is.
Footnotes
Handling Editor: Daxu Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant nos 51578094 and 51468058) and the Fundamental Research Funds for the Central Universities (grant no. 106112014CDJZR200011).