A non-fragile sliding mode control problem will be investigated in this article. The problem focuses on a kind of uncertain switched singular time-delay systems in which the state is not available. First, according to the designed non-fragile observer, we will construct an integral-type sliding surface, in which the estimated unmeasured state is used. Second, we synthesize a sliding mode controller. The reachability of the specified sliding surface could be proved by this sliding mode controller in a finite time. Moreover, linear matrix inequality conditions will be developed to check the exponential admissibility of the sliding mode dynamics. After that, the gain matrices designed will be given along with it. Finally, some numerical result will be provided, and the result can be used to prove the effectiveness of the method.
Switched systems have received more and more attention because of its convenience to model lot of real-world systems, for example, chemical process systems, communication systems, and transportation systems. And switched systems consist of a family of subsystems. These subsystems are governed by a switching signal.1 In fact, many fundamental results have been developed not only for switched systems of continuous-time but also for switched systems of discrete time.2–6 Furthermore, singular systems also have played a significant role in practical application. Recently, more and more attentions have been given to the research of stability analysis and stabilization for switched singular systems. As in the previous studies,7–9 the robust exponential admissibility problem is investigated. The problem is just for a kind of continuous-time uncertain switched singular systems in which the delay is interval time-varying; and the study by Zhou et al.,10 which focused on switched linear continuous-time singular systems, addressed the stability analysis of the systems. For more references, readers can refer to previous literature.11–14
Since its appearance, sliding mode control (SMC) has obtained increasing attention in practical applications for its good property of strong robustness which has a perfect performance against model uncertainties (including external disturbances and parameter variations), good order reduction and transient response in Choi.15 In the past few years, researcher has put SMC into those application areas like robot control, electrical motors, and underwater vehicles. As to SMC of switched systems, also there exist relative works, such as the study by Wu et al.,16 in which SMC of switched systems with stochastic perturbation is concerned and reduced-order sliding mode dynamics is derived; In the literatures,17–19 SMC of switched delay systems with nonlinear perturbations has been studied by average dwell-time method. But notice that few works draw attention to SMC of switched singular systems, so the research on switched singular systems’ SMC continues. Recently, in previous studies,20–23 a weighted sum method with the input matrices has been applied for considering the uncertain switched systems’ SMC, and one common sliding surface has been designed even though different input matrices exist in the subsystems. Motivated by this method and the fact mentioned aforehand, in this research, we will devote to discuss the SMC problem for a kind of switched singular systems.
However, the ideal assumption on the exact knowledge of the system state components does not always set up in real-world systems. In this case, it is impossible to realize the stability analysis and the implementation of controllers. And this aroused the issue of observer design. However, the variations in engineering application demonstrated are usually unavoidable. This may make the control systems’ performance worse, or even make the systems to be instable. And this leads to an issue that non-fragile control has obtained much attention, and lot of constructive results have been developed with regard to non-fragile control of dynamic systems.24–28
With regard to above analysis, this article concerns the non-fragile SMC problem which focuses on a kind of uncertain switched singular time-delay systems, in which state is not available. First, a non-fragile observer has been designed for obtaining the estimated state components. Then by using the introduced weighted sum approach, an integral-type sliding surface will be developed with common input matrix even though each subsystem has different input matrices. Furthermore, this article synthesizes an observer-based SMC law which can prove the reachability of the specified sliding surface within a limited time. Moreover, the average dwell time algorithm will gain the sufficient conditions on the exponential admissibility of the sliding mode dynamics. The contributions are listed as follows: (1) to better accommodate the variability of dynamical systems, no constraints on the full column rank of input matrices are imposed on switching systems; (2) dynamics are often affected by nonlinearities, and the observer-based compensator is designed to attenuate the influence for stabilization purpose; and (3) the exponentially stable ability of singular switching system is achieved by solving the typical minimization problems on the observer space.
The rest of this article is structured as follows. In the second section, problem statement and preliminaries will be given. In next section, the steps of SMC method are realized by the proposed non-fragile observer, and linear matrix inequality (LMI) conditions are obtained to prove the exponential admissibility of the sliding mode dynamics. An illustrative example will be offered for demonstrating the effectiveness of the proposed approaches in the fourth section. Some conclusions will be given in last section.
Notations
Let matrices have compatible dimensions if their dimensions are not point out clearly. Let stand for the -dimensional real space; let be the real matrix space; and let ∥·∥ be its induced matrix norm or the Euclidean norm of a vector. Given any real symmetric matrix, let denote that the matrix is positive (negative) definite. Give a vector , let be its transpose and let be . Let I denote an identity matrix, let diag (·) to be a diagonal matrix, let the vector is the one whose element is all ones, and let to be the vector which is ith standard base. For a real symmetric matrix, let to be the maximum eigenvalue and let to denote the minimum eigenvalue. Given rank (·) to present the rank of a matrix, let * stand for a part in a matrix which is induced by symmetry and let ⊗ to be the Kronecker product.
Problem statement and preliminaries
Give the uncertain switched singular systems as follows
where is the control input, stands for the state, and stands for the system output. Let us assume that the . stands for a family of known matrices and and are the parameter uncertainties; all of them depend on the which is a index set. For time t, let to be a piecewise constant function, which is said to be switching signal. And the admissible uncertainties satisfy the following
where , , and are constant matrices known before. stands for an unknown matrix function which satisfies . Moreover, it is assumed that the external disturbance has a character of norm bounded, which means that , where is a positive scalar. Without lose of generality property, the matrix is assumed to be full column rank, which means that rank .
In the sequel, let the parameters which are linked with the ith subsystem to be , for each possible value . And the switching sequence , in accordance with the switching signal , intends that the ikth subsystem is activated as .
The content of this article could consist the following: non-fragile observer-based method is used to conduct the SMC problem of system (1). Then, exponential admissibility of the sliding mode dynamics will be guaranteed. Finally, the lemma and definition described as follows are introduced in this article.
Lemma 1
The H, D, and stand for real matrices.29 And let has the character to make set up. After that, for every , one can obtain
Definition 1
Given any , we denote to be the switching number of among .30 If
for and , one can call to be the average dwell time. We let equal 0. This is widely applied in the former research.
Definition 2
1. Given any , when the pair is impulse free and regular, we can say the following
to be impulse free and regular.
2. Given any scalars and , if the following
has a solution , then one can say that the equilibrium equals 0 of system (2) is to be exponentially stable.
3. If singular switching system (2) is impulse free, regular, and exponentially stable, after that one can call it to be exponentially admissible.
Non-fragile observer-based SMC
In this part, first, we will design a non-fragile observer. Then, the first step of SMC is considered, that is, an integral-type sliding surface will be introduced, which is based on estimated state; moreover, in the second step of SMC, we synthesize an SMC law. This law has the ability to put the state trajectories arrive at the sliding surface predefined within limited time. Finally, the exponential admissibility of the sliding mode dynamics will be studied.
Non-fragile observer
First of all, we propose the non-fragile observer for equation (1) to be the formulation as follows
where stands for the estimation of the state , external discontinuous feedback compensation control is presented by the robust term , which has a good ability to eliminate the effect of that is the nonlinear term, and is the observer gain to be determined. is a perturbed matrix, which is bounded in the following form
where is presented as an matrix which is time-varying, unknown, and satisfies , and and stand for constant matrices.
Let , we have the estimation error system as follows
where .
Sliding surface design
The sliding mode function will be introduced as the following formulation
where is selected to satisfy , which is nonsingular for every ; the matrix K is introduced later in this article. Here, B is introduced as in Wang et al.13 and described by
where stands for a parameter which satisfies , in which and both are known scalars. Then, let
And we have that and .
Remark 1
For the introduced matrix B, in each subsystem, it is not necessary that the which is input matrix is the same. And since has full column rank, the assumption of is nonsingular could be easily satisfied if . Furthermore, considering the sliding surface in equation (6), we could design a common sliding surface if we choose a common matrix G instead of , and this way of selecting sliding surface is much more flexible than those in the study by Liu et al.21
In view of sliding mode theory, if the state trajectories arrive at the sliding surface, then and . Thus, equivalent control could be gained consequently as follows
After substituting system (8) into equation (4), one can gain the sliding mode dynamics
where , , , , and .
SMC law synthesis
In order to guarantee reachability of the sliding surface, we will synthesize an SMC law in this part. Finally, the sliding mode controller has been developed which has the following formulation
and the , which is the robust term in equation (4), has been designed as follows
where and stand for positive scalars, as well as the X is to be introduced in Theorem 2 later.
The following theorem is to analyze the reachability of the sliding surface .
Theorem 1
Let Assumption 1 setting up under the switched systems (1). When the SMC law is developed as equations (9)–(10) for the designed sliding function (6), the state trajectory could be arrived at the specified sliding surface within a limited time.
This implies that the state trajectories could arrive at the switching surface predefined within a limited time. It is completes this proof.
Sliding mode dynamics analysis
Theorem 2
Let switched singular systems (1) satisfy Assumption 1. Let , if , , , with appropriate dimensions as well as positive scalars and , so the following LMI is satisfied for every
with
where stands for any matrix with full column which satisfies , and
Then, the closed-loop system is called exponentially admissible having average dwell time and the parameter
Moreover, the norm of obeys
where
Proof 2
First, we will prove that the sliding mode dynamics (8) and the error system (4) are impulse free and regular. Because , two nonsingular matrices L and H exist, which satisfy
which means is nonsingular. Thus, the pair is impulse free and regular. By definition 2, the sliding mode dynamics is impulse free and regular. It is similar to the error system (4).
Next, we will prove the considered systems’ exponential stability. According to the closed-loop system, we select the following Lyapunov functional
Thus, along the solution of systems (4) and (8), we have
According to equations (17) and (31), one can see that the closed-loop system has the exponentially stable character. This proof is completed.
In order to develop sliding mode controller and non-fragile observer, the observer gain in equation (3) and the sliding mode gain in equation (5) should be given in advance. To this end, we draw out the results as follows.
Theorem 3
Consider the switched systems (1)–(2) satisfy Assumption 1. Let scalar , if there exist , , , , having appropriate dimensions and positive scalars and , such that the LMIs as follows set up for every
and
where
and the average dwell time
For arbitrary switching signal , the closed-loop system has a exponentially stable ability. The other notions are defined in Theorem 2. Moreover, the sliding mode gain is presented by , and the non-fragile observer gain is denoted by , where and are the Moore–Penrose inverse of matrices B and , respectively.
Proof 3
In the proof of Theorem 2, noting that such that for any . Also, we have confirmed that is nonsingular in Theorem 1, so letting and , we could easily have that equation (32) guarantees equation (13) holds.
Remark 2
Noting that the conditions proposed in above theorems exist linear matrix equality, which could not get a solution using MATLAB’s LMI-Toolbox directly. In order to solve these problems, equation (14) is replaced by the equivalent forms as follows:
So, the non-fragile observer-based SMC control problem has been transformed into solving a global solution of the following problem, which is a typical minimization problem
Numerical simulation
Let the switched singular system (1) with as well as parameters as follows.
For , the system’s dynamics are introduced as follows
For , the system’ dynamics are introduced as
The E is assumned to be
Moreover, and are selected as and , and . The tuning scalars . By solving LMI (32) and (37) using Matlab, one feasible solution is given as follows with ,
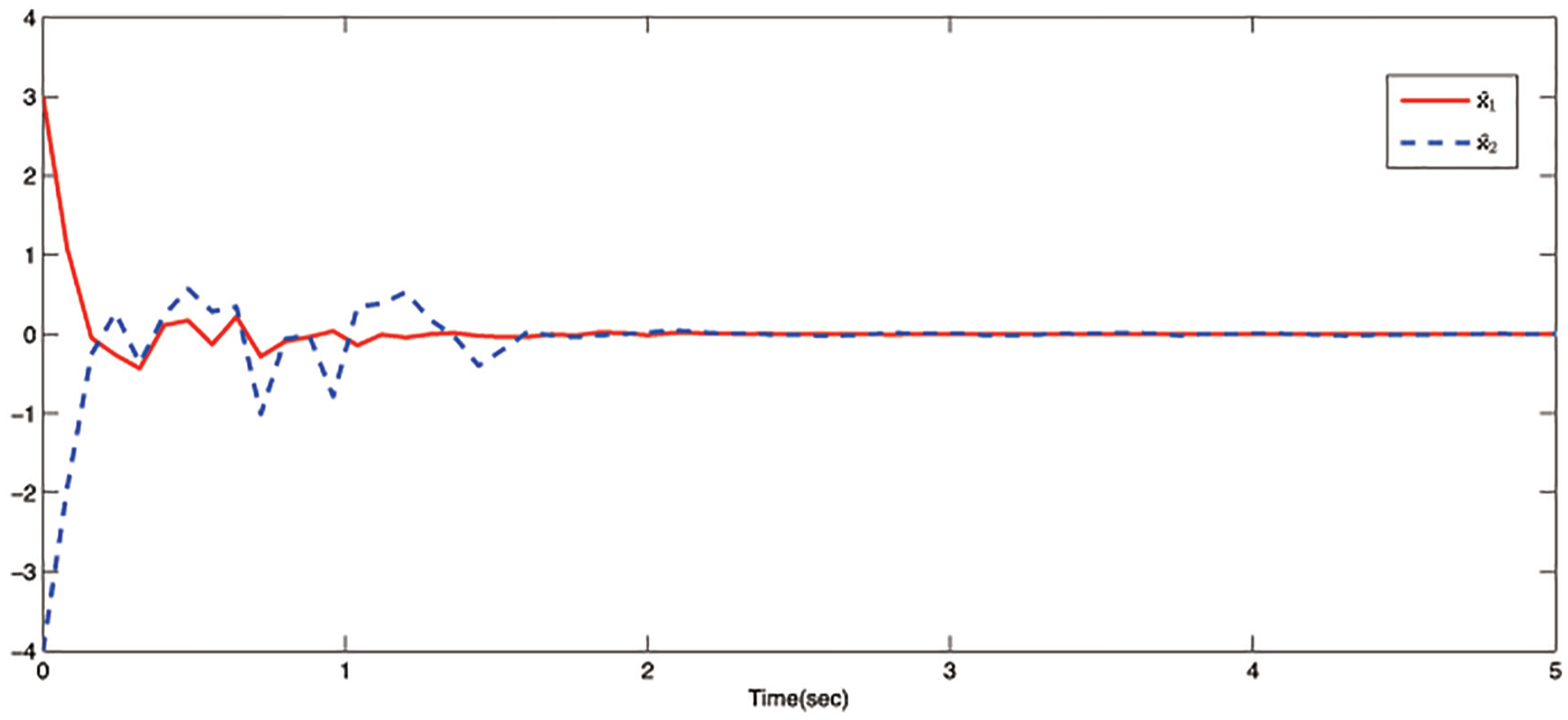
For simulation purpose, let the initial conditions for all . And the adjustable scalars and . The simulation numerical results can be obtained from Figures 1 to 4. Figure 1 plots the switching signals; Figures 2 and 3 give the state response of the original system and the observer system, respectively; and the control input is shown by Figure 4.
Switching signal with average dwell time .
State response of .
State response of .
Control input .
Conclusion
This research has discussed the non-fragile SMC of uncertain switched singular systems which is with time delay. Since system states are not available, we have designed a non-fragile observer at first; second, a switched integral-type sliding surface has been constructed according to the estimated states, and this method could be extended to develop other common sliding surface for the benefit of the introduced input matrices’ weighted sum. Third, an SMC law has been synthesized in order to make sure the reachability of sliding surface. Furthermore, the exponential admissibility of the closed-loop system could be proved using a minimization problem along with LMI conditions. Finally, a numerical result has been presented to demonstrate the effectiveness of the method.
Footnotes
Handling Editor: Hamid Reza Karimi
Author’s Note
Zhengtian Wu is also affiliated with Suzhou Key Laboratory for Big Data and Information Service, Suzhou, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by grants from NSFC under Grant Nos 61803279, 11871366, 51874205, and 61672371; GRF: CityU 101113 of Hong Kong SAR Government; Jiangsu Provincial Department of Housing and Urban–Rural Development under grant No. 2017ZD253; Suzhou University of Science and Technology under grant No. XKZ2017011; Ministry of Housing and Urban and Rural construction under grant No. 2018K1-007, Foundation of Key Laboratory in Science and Technology Development Project of Suzhou under grants No. SZS201813 and No. SZS201609, and China Scholarship Council.
ORCID iD
Zhengtian Wu
References
1.
DaafouzJRiedingerPIungC.Stability analysis and control synthesis for switched systems: a switched Lyapunov function approach. IEEE T Autom Control2002; 47: 1883–1887.
2.
GaoHLamJWangC.Model simplification for switched hybrid systems. Syst Control Lett2006; 55: 1015–1021.
3.
ZhaiGLinHKimYet al. L/sub 2/ gain analysis for switched systems with continuous-time and discrete-time subsystems. Int J Control2005; 78: 1198–1205.
4.
WuLHoDW.Reduced-order L2-L/∞ filtering for a class of nonlinear switched stochastic systems. IET Control Theory A2009; 3: 493–508.
5.
WangYKarimiHRLamHKet al. An improved result on exponential stabilization of sampled-data fuzzy systems. IEEE T Fuzzy Syst2018; 26: 3875–3883.
6.
ZhaoXWangXZongGet al. Fuzzy-approximation-based adaptive output-feedback control for uncertain non-smooth nonlinear systems. IEEE T Fuzzy Syst2018; 26: 3847–3859.
ZhaoXShiPZhengX.Fuzzy adaptive control design and discretization for a class of nonlinear uncertain systems. IEEE T Cybernetics2016; 46: 1476–1483.
9.
JiangBKarimiHRKaoYet al. A novel robust fuzzy integral sliding mode control for nonlinear semi-Markovian jump T–S fuzzy systems. IEEE T Fuzzy Syst2018; 26: 3594–3604.
10.
ZhouLHoDWZhaiG.Stability analysis of switched linear singular systems. Automatica2013; 49: 1481–1487.
11.
ZhaiGXuXHoDW.Stability of switched linear discrete-time descriptor systems: a new commutation condition. Int J Control2012; 85: 1779–1788.
12.
MaYFuLJingYet al. Finite-time H control for a class of discrete-time switched singular time-delay systems subject to actuator saturation. Appl Math Comput2015; 261: 264–283.
13.
ChenSCKuoCY.Design and implementation of double-integral sliding-mode controller for brushless direct current motor speed control. Adv Mech Eng2017; 9: 1–9.
14.
WangYKarimiHRShenHet al. Fuzzy-model-based sliding mode control of nonlinear descriptor systems. IEEE T Cybernetics2018: 1–11. DOI: 10.1109/TCYB.2018.2842920
15.
ChoiHH.LMI-based sliding surface design for integral sliding mode control of mismatched uncertain systems. IEEE T Autom Control2007; 52: 736–742.
16.
WuLHoDWLiCW.Sliding mode control of switched hybrid systems with stochastic perturbation. Syst Control Lett2011; 60: 531–539.
17.
LianJWangM.Sliding-mode control of switched delay systems with nonlinear perturbations: average dwell time approach. Nonlinear Dynam2010; 62: 791–798.
18.
WuZLiBDangCet al. Solving long haul airline disruption problem caused by groundings using a distributed fixed-point computational approach to integer programming. Neurocomputing2017; 269: 232–255.
19.
ChangXHParkJHShiP.Fuzzy resilient energy-to-peak filtering for continuous-time nonlinear systems. IEEE T Fuzzy Syst2017; 25: 1576–1588.
20.
ChangXHYangGH.Nonfragile H∞ filtering of continuous-time fuzzy systems. IEEE T Signal Process2011; 59: 1528–1538.
21.
LiuYNiuYZouY.Non-fragile observer-based sliding mode control for a class of uncertain switched systems. J Frankl Inst2014; 351: 952–963.
22.
JiangBYongguiKKarimiHRet al. Stability and stabilization for singular switching semi-Markovian jump systems with generally uncertain transition rates. IEEE T Autom Control2018; 63: 3919–3926.
23.
ChangXHXiongJParkJH.Estimation for a class of parameter-controlled tunnel diode circuits. IEEE T Syst Man Cy S2018: 1–11. DOI: 10.1109/TSMC.2018.2859933
24.
HuaMTanHChenJet al. Robust delay-range-dependent non-fragile H∞ filtering for uncertain neutral stochastic systems with Markovian switching and mode-dependent time delays. J Frankl Inst2015; 352: 1318–1341.
25.
KaoYLiWWangC.Nonfragile observer-based H∞ sliding mode control for Itô stochastic systems with Markovian switching. Int J Robust Nonlin Control2014; 24: 2035–2047.
26.
VembarasanVBalasubramaniamPChanCS.Non-fragile state observer design for neural networks with Markovian jumping parameters and time-delays. Nonlinear Anal Hybrid Syst2014; 14: 61–73.
27.
JiangBKaoYGaoCet al. Passification of uncertain singular semi-Markovian jump systems with actuator failures via sliding mode approach. IEEE T Autom Control2017; 62: 4138–4143.
28.
AhmedNChenM.Sliding mode control for quadrotor with disturbance observer. Adv Mech Eng2018; 10: 1–16.
29.
XieLFuMde SouzaCE.H/sub infinity/control and quadratic stabilization of systems with parameter uncertainty via output feedback. IEEE T Autom Control1992; 37: 1253–1256.
30.
LiberzonD.Switching in systems and control. Springer, Boston, MA: Birkhauser, 2003.