
Abstract
Since the path planning plays a significant role in the manipulator’s control, the system reliability evaluation and optimization for path planning are studied with consideration of the joint clearance. A simple moment estimation–based method is proposed; a linear performance function is first established using the extreme value distribution theory. Based on the maximum entropy principle, the first four moments of variables are utilized to derive a best-fit probability density function to feature the characteristics of the system distribution rather than an empirical assumption of the normality. To meet the system reliability criterion constraints, a sensitivity analysis is conducted using the direct linearization method. With modification in the tolerance of sensitive parameters, the reliability can be improved efficiently. Traditional methods, such as the first-order second moment method, the first-order reliability method, and Monte Carlo simulation, are popular in this research field and therefore they are applied as benchmark methods for comprehensive comparisons in the accuracy and efficiency. A typical serial manipulator is applied as an example to validate the feasibility of our proposed method.
Keywords
Introduction
Manipulators are widely employed in industry since they can promote the efficiency significantly, especially for a large amount of repetitive work. However, clearances always exist in the connections at adjacent joints due to material deformation and assembly errors. The random variation in joint clearance may cause errors in the angle value and the effect can be delivered via the kinematic model. Therefore, the manipulator’s actual motion will often deviate from its designed motion. This kind of deviation in position can be called the position error. In addition, some other adverse impacts originated from joint clearances and deviation in dimension of links include uncontrollable vibration, aperiodic shocks, and noise.1–3 Since undesired motion of a manipulator should be avoided, the appropriate evaluation of the reliability is essential during the path planning procedure. The kinematic reliability of a manipulator is usually classified into two categories: the point reliability and the system reliability. The former mainly focuses on the evaluation of reliability in respect of a particular point, while the latter considers the reliability computation for the entire path. 4
A lot of studies have analyzed the point reliability because the manipulator is commonly used for repetitive work, for example, transport and assembly, in which only a few points require a high accuracy and reliability.5,6 However, a manipulator can be also applied for welding and milling in automobile industry, in which a target path needs to be appropriately planned in advance.7,8 Obviously, we have to ensure that position errors at all the points are controlled. Therefore, system reliability is another important issue. Unfortunately, literature in this topic is limited. Huang and Zhang 9 integrated the kinematic accuracy theory with matrix-based method to obtain the correlated failure modes; this method was only applicable to compute the interval reliability for planar linkage. Pandey and Zhang 10 proposed a fractional moment method to analyze the reliability of a manipulator; the solution was accurate but two nested time-consuming optimization processes were required. Zhang et al. 11 calculated the system reliability of a planar linkage mechanism with combination of the first-order second moment method (FOSM) and the first-passage Poisson approximation method. Coit and Smith 12 made use of a genetic algorithm (GA) to handle the redundancy allocation problem for a series–parallel system with consideration of the cost, reliability, and weight. Painton and Campbell 13 established an optimization model to identify the best performance type of the structure which had the maximum system reliability. In their work, GA was applied as a solution method. Similarly, Kumar et al. 14 integrated GA with the fuzzy methodology to study the synthesis of mechanism for a clean-up manipulator. The GA is commonly used for the mechanism analysis and synthesis because it is helpful to determine the optimal design configuration with multiple optimization objectives, in which a lot of component choices are available.
Later on, some other advanced methods based on the artificial neural networks (ANN) have been proposed to evaluate the system reliability. Deng et al. 15 developed a feed-forward ANN-based first-order reliability method (FORM) to estimate the implicit performance function for a structure reliability analysis. Cheng et al. 16 presented an ANN-based response surface method to obtain the reliability of a system with extremely small estimated failure probability, in which traditional methods were not working. Since ANN methods have the ability to learn and to classify on the basis of a parallel distributed processing, they can provide a convenient way to approximate the performance function which is not available as an explicit function. However, the requirement for a mass of training data and the complicated multi-layer neural network structure make it less attractive. 17
In general, based on the above-mentioned methods, we can only calculate a reliability which guides us to determine whether the manipulator is qualified or not, it is inadequate to understand how the change in each parameter will affect the reliability of a manipulator. Therefore, we need to conduct a sensitivity analysis and an optimization process to meet the reliability requirement for the path planning. To measure the kinematic sensitivity of a parallel manipulator, Cui et al. 18 used the random probability theory to construct a mathematical model. Li et al. 19 applied the dimensionality reduction method to analyze the reliability sensitivity for a vibration system. In order to identify contributions of the parameter uncertainty to the time-variant reliability, Wei et al. 20 presented a global reliability sensitivity (GRS) analysis technique. Zhang et al. 21 put forward an approach to handle the problem of sensitivity analysis for a system with arbitrarily distributed variables. All the presented methods rely on a sensitivity index, in which an explicitly non-linear performance function for mapping the relationship between random variables and system outputs needs to be established first. 22
Review of the listed literature indicates that most of the current methods devoted to the research on the reliability estimation and sensitivity analysis can still be improved to some extent:
Conventional methods, such as FOSM, are limited because of the base of a spurious hypothesis that the position error follows a normal distribution.9,11,23 FORM and ANN-based method are of low efficiency when confronted with a sophisticated system with multiple unknown parameters. 24
The reliability-based sensitivity method is not applicable due to the lack of the direct non-linear performance function of random variables. 21 GA can be widely used for the synthesis of mechanism but is less attractive for the reliability optimization.
This article mainly focuses on developing a new method to solve the path planning problem for a manipulator with consideration of the reliability criterion requirement. Based on the maximum entropy principle, the first four moments of variables are obtained and are treated as constraints to search for a best-fit probability density function (PDF) of the system output distribution. The sensitivity analysis is performed with utilization of the direct linearization method (DLM) to determine main effect parameters. With modification in the tolerance of main effect parameters, the reliability can be improved efficiently. Notable aspects include the following: (1) the spurious assumption of the normality is abandoned, thus a perfect PDF can be found, which ameliorates the estimated accuracy; (2) neither the iterative process nor a large size of sample is required, thus the efficiency is improved; (3) the sensitivity analysis can be performed based on the linear performance function, that means, the method has a wider range of applications.
The article is organized as follows. Section “Probabilistic model for the path planning” describes the kinematic probabilistic model. Section “Reliability estimation based on the FOFM” presents details of the proposed method, first order fourth moment method (FOFM). The parameter sensitivity analysis is carried out in section “Parameter sensitivity analysis based on the DLM.” Simulation is presented in section “Simulation and results” followed by some conclusions in the last section.
Probabilistic model for the path planning
Forward kinematics
The coordinates of the end-effector of a manipulator relative to the base frame in Cartesian space are determined through forward kinematics. The standard transformation from one frame to another can be represented by a 4 × 4 homogeneous matrix, also named as the D-H matrix, 25 given as follows

where S and C denote sine and cosine functions, respectively; (ai, di, αi, θi) are the D-H parameters of the ith link.
The final transformation matrix of the end-effector is defined as the product of all the D-H matrices

where n is the number of degree of freedom (DOF),
In this research, the kinematic analysis is conducted using a typical serial manipulator with 6 DOFs; the three-dimensional (3D) model and corresponding D-H link coordinate are drawn in Figure 1(a) and (b), respectively. All the D-H parameters of this manipulator are listed in Table 1.

Schematic representation of the serial manipulator: (a) 3D model and (b) D-H link coordinate.
D-H parameters of the serial manipulator.

Distribution of parameters
Unaccepted behaviors of the manipulator may be caused by parameter uncertainties in kinematics and dynamics. All of them are random in some extent; the variable of the actual rotation angle of the ith joint with clearance is uniformly distributed and can be modeled as follows 26

where
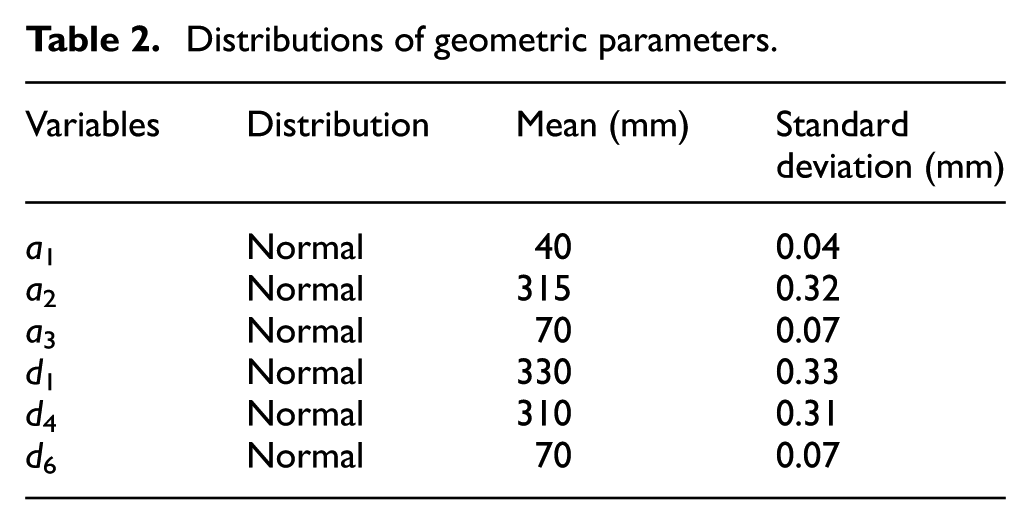
All the geometric parameters with uncertainties meet the normal distribution. The random nature of the variables is summarized in Table 2.
Distributions of geometric parameters.
Reliability estimation based on the FOFM
Definition of the system reliability for the path planning
The actual and desired positions of the end-effector are often different because of the joint clearance. The deviation is defined as the position error in terms of a particular point and can be formulated as follows 24

where
Given a permitted threshold value

Thus, the reliability can be represented as follows

where
The system reliability means the probability that the end-effector falls inside the permissible region at every point on the path. The reliable, failed, and desired paths during the planning procedure are illustrated in Figure 2. Therefore, the system reliability can be defined as follows

where

Illustration of the path planning.
As we can see, there are not only one but N performance functions in terms of equation (6). Li et al.
27
approved that evaluation of the reliability for a mechanism with multi-layer subsystems can be converted to the computation of an equivalent system. This calculation process is only related to the maximum output of all subsystems. Inspired by this idea, we introduce a variable

Hence, the system reliability represented by equation (7) can be transformed as follows

The performance function for the system reliability can be naturally defined as follows

Suppose that a function

The first four moments of
FOFM
Considering a set of random samples,

When k equals two,

The first four moments of Z can be also calculated with the corresponding moments of

where
For simplicity, we transform the variable Z into a standard variable Y; the transform equation is as follows

The information entropy was proposed by Shannon to measure the uncertainty of a random variable in statistics; the Shannon entropy of a random variable Y with its PDF

The first four origin moments of the variable Y are defined as follows

The first four origin moments of Y are considered as the constraints. The estimation of f(y) can be converted to a constrained optimization problem. Therefore, the Lagrange multipliers method is used, and the Lagrange function is defined as follows

where
A necessary condition to figure out the optimal solution is as follows

Through equation (19), we can obtain the optimal estimation of the actual PDF of variable Y formulated as follows

Since the first four moments of Y have been obtained, with combination of equations (17) and (20), a set of equations for Lagrange multipliers are established given as follows

MATLAB functions of quadgk and fsolve can be then utilized to search for the Lagrange multipliers. Hence, the reliability of the manipulator can be computed as follows

Parameter sensitivity analysis based on the DLM
The lack of clear understanding between concerned parameters and targeted performance lowers the efficiency and accuracy of the optimal calculation. Therefore, the parameter sensitivity analysis becomes necessary. The statistic characteristics in terms of mean value and variance are considered with conventional methodology. The reliability sensitivity is obtained by the differentiation of reliability index expression given as follows 29


where
This reliability-based sensitivity method is useful for the sensitivity identification of a manipulator reference to a specific point, but it fails as the performance function is linear and the relationship between reliability index and variables is ambiguous.
In this article, parameter sensitivity analysis is conducted with the DLM. The relationship between the position error and variables can be expressed with a linear equation 30 written as follows

where Δ
In tolerance analysis,

Since the sensitivity matrix is available, the influence of each parameter on the position error can be estimated. The trajectory of the end-effector in Cartesian space or joint space is composed of N discrete points. To compute the impact of the jth variable to position error at the kth point, the deviation of the jth variable is defined as follows

where
A contribution index is defined for sensitivity assessment of the jth variable at the kth point as follows

where
Similar to the definition of sensitivity at single point, the sensitivity of the jth variable along one of the three directions can be determined by

where N is the number of discrete points.
For computing the contribution of the jth variable to the position error in the entire path, the following equation can be used, formulated as follows

In order to ensure that the manipulator performs safely and reliably in the whole path, the contribution index is designed to measure the actual impact of each variable on the position error of the end-effector. Since the system reliability is directly correlated with the maximum position error, we can optimize the system reliability with target modification in main effect and subordinated parameters determined by the contribution index.
Simulation and results
Reliability calculation
A typical manipulator with 6 DOFs is used as an example to illustrate the implementation of the proposed approach, and a non-linear path of the end-effector is planned with equation (31)

where t increases from t = 0 to t = 4π with each step of 0.359 rad.
As shown in Figure 3, we can obtain 36 discrete points of the resulting path from the start point A to the end point D.

Target path of the end-effector.
The flow chart drawn in Figure 4 describes the process of system reliability evaluation. At first, based on the distribution of variables, 12 random samples representing 6 joint values with clearance and 6 geometric parameters with uncertainty are generated as input, position errors for the 36 points on the path are computed, and the maximum error is selected. After 500 times repetition, a set of observations of maximum position error can be available.

Steps in FOFM for the system reliability analysis.
FORM and FOSM are two most popular methods for reliability analysis. With the same 500 samples, they are used to make an accuracy comparison. With a large scale of 106samples, the solution of Monte Carlo simulation (MCS) is treated as the benchmark result. The whole process is conducted with an Intel Core i7 CPU and it can be decomposed into two steps: samples generation and numerical calculation.
We used the four above-described methods (MCS, FOSM, FORM, and FOFM) to evaluate

where
The results are drawn in Figure 5(a) and the corresponding estimation errors are plotted in Figure 5(b).
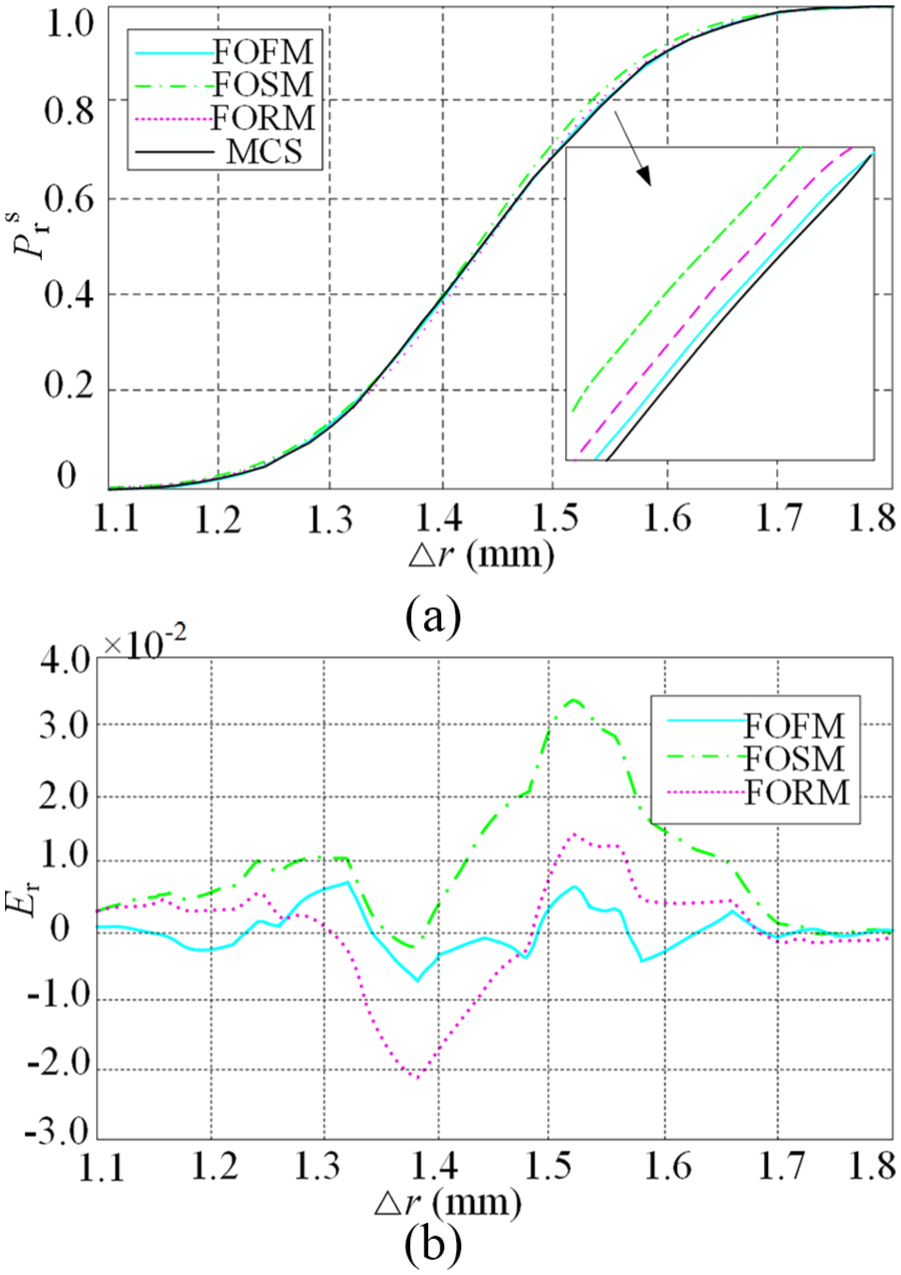
Reliability of the manipulator and estimation error: (a) system reliability of the manipulator and (b) estimation error of three approximate methods.
In order to evaluate the efficiency of each approximate method, we adopted the equation, given as follows

where
The CPU time of the four methods in each step and the ex-error (extreme error) are listed in Table 3.
Simulation time and extreme error of each approximate method.
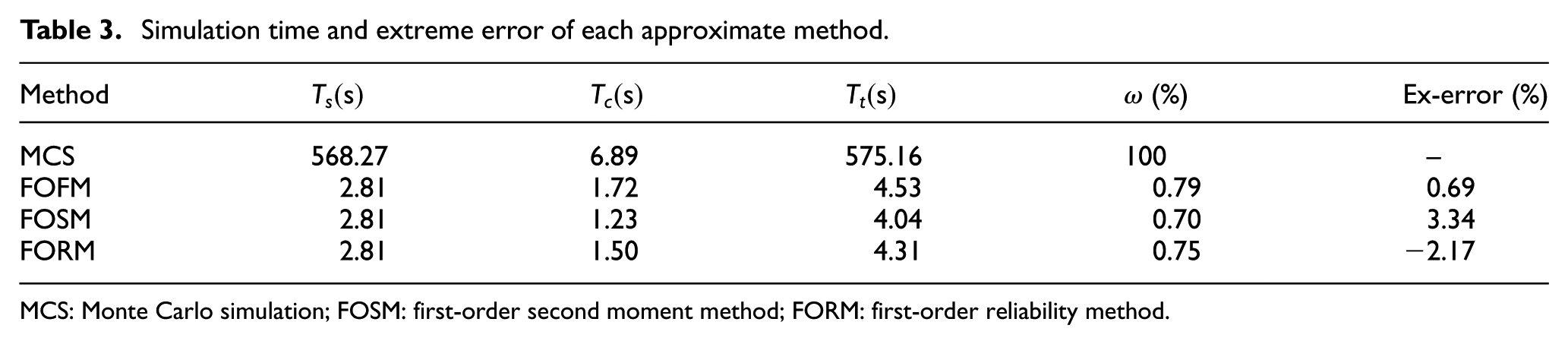
MCS: Monte Carlo simulation; FOSM: first-order second moment method; FORM: first-order reliability method.
The results calculated by MCS and FOFM are very close, which can be noted from Figure 5. From Table 3, we can observe that FOFM has an extreme error of 0.69% which is smaller than that for FOFM (3.34%) and FORM (−2.17%). Thus, FOFM exhibits the highest accuracy among all the three approximate methods. Another remarkable feature of FOFM is time-saving. From Table 3, it is clear that all the three approximate methods are much better than MCS by nearly 100 times in efficiency. The CPU time of FOSM is close to that for FOSM and FORM; even more information is concluded and analyzed in FOFM.
Figure 6 shows the statistical histogram for the maximum position error based on 106 simulations. It can be observed that outputs of the manipulator do not follow the normal distribution. Actually, it is left skewed, which can be one of the reasons why FOSM exhibits lower accuracy than others.

Frequency histogram of the maximum position error.
Parameter sensitivity calculation
Figure 7 shows the contribution index histograms for all parameters in three directions (x, y, and z, respectively) at the particular point D. It can be noted that each parameter has a varying degree of influence on the position error.
Contribution index at the point D.
All the parameters’ contributions to the position error in x-direction are first drawn in Figure 8(a). It can be easily observed that θ2 has a dominant influence because its contribution is greater than 50%. θ3 exhibits less sensitivity than θ2 but much better than any other parameters. In terms of geometric parameters, d4 takes about 3.47%, which is slightly greater than that for a1 because the nominal value and standard deviation of d4 are larger than that for a1. All the other geometric parameters have influence rarely. The reason is that d1, a2, and a3 measure the distance in the z-direction instead of the x-direction (as shown in Figure 1). Uncertainty of these parameters can make the impact on the position error in the z-direction, which is approved by the results shown in Figure 8(c). Figure 8(b) indicates that the position error in y-direction is mainly affected by the joint clearance, especially by θ1 and θ2.

Percent contribution of parameters to the position error in the different direction: in the (a) x-direction, (b) y-direction, and (c) z-direction
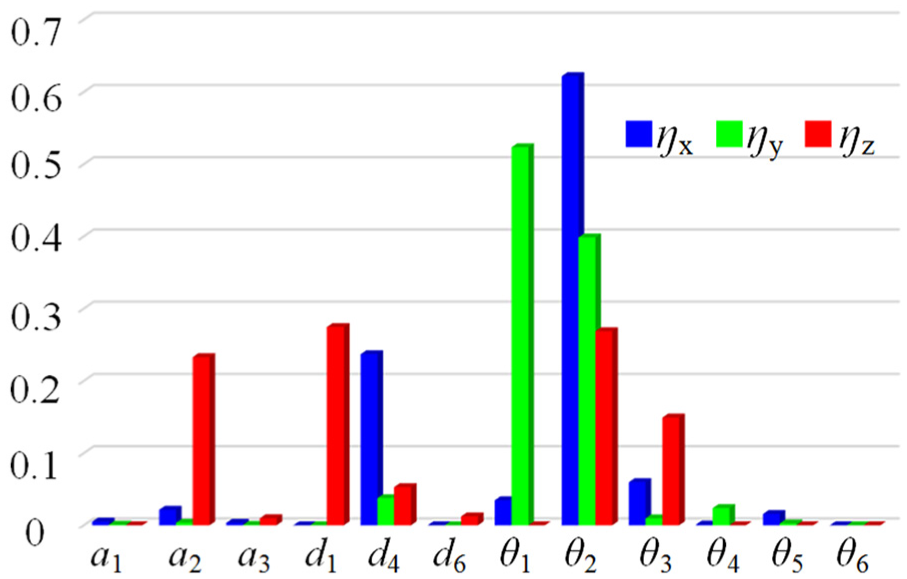
Since the sensitivities of all parameters in three directions are figured out, it is easy to obtain the global contribution of each parameter for the entire path, as shown in Figure 9. We can sequence the sensitivity of all the parameters according to the contribution index; the result is presented as follows: θ2 > θ1 > θ3 > d1 >a2 > a3 > d4 > θ5 > a1 > θ4 > d6 > θ6.

Contribution index histograms for the entire path.
As shown in Figures 7–9, we can further deduce that (1) the larger the size and standard deviation of the geometric parameter are, the greater is the influence; (2) all else being equal, for the serial manipulator, the joint clearance which is closer to the base frame can play a more important role in design than those are far away from the base frame; and (3) the first several joint clearance usually has a dominant influence compared with geometric parameters.
Reliability optimization
How the change of parameters influences the position error has been analyzed. In order to make the manipulator meet the reliability requirement, a process for reliability optimization is to be performed if necessary, and the corresponding flow chart is shown in Figure 10.

Reliability improvement process.
To understand this problem better, two main effect parameters

Reliability with different parameters’ tolerances.
Maximum reliability improvement with reduction in tolerance.

Lagrange multipliers under different tolerance values of parameters.
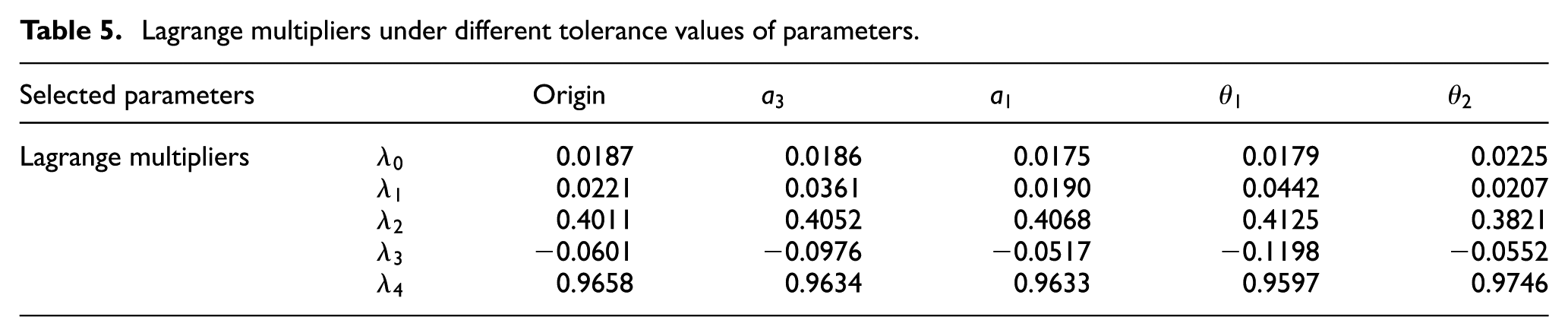
As we can see from Figure 11, the reliability increases with the decrease in the tolerance of parameters, but the degree of the improvement varies with parameter. Parameters having higher contribution index can improve reliability to a greater extent. From Table 4, we can note that the modification in
Conclusion
Path planning is a foundation problem for the manipulator control; since the system reliability is a useful criterion to measure the performance quality, it can also reflect the probability of failure for the motion along the designed path. Hence, the appropriate evaluation of the reliability is necessary. We proposed a new method to estimate the reliability and then carried out a sensitivity analysis to determine main effect parameters. The conclusions are summarized as follows:
The moment estimation–based method is feasible for the path planning—With the first four moments, a best-fit PDF is derived to feature characteristics of the system outputs’ distribution, instead of relying on a spurious assumption of the normality. In addition, no iterative process or transformation of non-normal parameters is required. Therefore, the proposed method is simple and can be used for any type of distribution. From this perspective, the new method has a wider range of application.
The better accuracy and efficiency make FOFM notable—FOFM can increase the accuracy by nearly four times compared with that of FOSM and FORM. The extreme estimation error of the three methods are 0.69%, 3.34%, and −2.17%, respectively. In addition, FOFM is nearly one hundred times more efficient than MCS. All things considered, FOFM can outperform over other three conventional methods.
The contribution index is useful to measure the parameter sensitivity—With the DLM, the actual impact of deviation in each parameter on the position error is obtained. A higher contribution index means that the corresponding parameter plays a more important role on the performance quality. The results indicate that the joints which are close to the base frame usually exhibit greater influence than geometric parameters.
However, FOFM is still an approximate method which cannot eliminate all the errors originated from the process of the moment estimation and the function evaluation. If a higher accuracy is expected, more than four moments may be utilized.
Footnotes
Handling Editor: Davood Younesian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research work is financed by the National Key R&D Program of China (No. 2017YFB1301203), the National Natural Science Foundation of China (No. 51675470), the Fundamental Research Funds for the Central Universities (No. 2017QNA4001) and the China Postdoctoral Science Foundation (2018M630670).