
Abstract
The permanent-magnet synchronous motor system will display a variety of chaotic phenomenon when its parameters or external inputs satisfy certain condition, and thus its performance would be deteriorated. Therefore, chaos should be suppressed or eliminated. In this article, a practical method which combines adaptive robust control with a single-layer neural network–based disturbance observer is proposed for elimination of the chaos and high-performance motion control of permanent-magnet synchronous motor. The proposed controller not only accounts for the load torque disturbance but also takes the parametric uncertainties into account. A single-layer neural network–based disturbance observer is designed to estimate the disturbance while an adaptive control law is designed to estimate the parameters respectively. Then, all the estimated values are used in the feedforward cancelation item in the controller via a backstepping technique. Lyapunov’s method is used to prove the stability of the novel control scheme. Sufficient comparative simulation results are obtained to validate the effectiveness of the proposed control strategy.
Introduction
Nowadays, permanent-magnet synchronous motors (PMSM) have been adopted as the primary actuating components in many industries due to its high power density, high efficiency, eco-friendly, low cost, and large torque-to-inertia ratio1–3 compared with its hydraulic part. 4 However, it is still a challenge to realize a high-accuracy motion control of this kind of motor servo system since it is often a multi-variable nonlinear system with parametric uncertainty and external disturbances, which may lead to undesired behavior of PMSM servo system and even make the system unstable. Most studies just focus on modeling and controller designing, while ignoring some special nonlinear dynamic characteristics in the system, such as the irregular oscillation and low-frequency electro-magnetic noise. Recently, more and more research results show that the motion systems driven by PMSM can make chaotic movements when their parameters reach some certain values.5–7 These nonlinear chaotic behaviors may explain why the aforementioned irregular oscillation and low-frequency electro-magnetic noise often occur in the motion systems driven by PMSM. This would deteriorate the performance of the systems and even make them instable.8–11
The Ott–Grebogi–Yorke (OGY) method is a classic method for chaos control, which is proposed by Ott et al. 12 and could stabilize a sequence of Poincare section crossing points by adjusting a control parameter. However, it costs too much time to stabilize the system. Then, the time-delay feedback control (TDFC) was proposed by Zhang et al. 13 It could make the system move along a desired periodic trajectory when the system moves close to the periodic trajectory. However, the desired trajectory must be one of the unstable periodic trajectories of the system or at the equilibrium, which could not satisfy the requirement in the reality. Feedback linearization technique was used for the chaos control in motor servo systems in the literature.14,15 It enabled the controlled system to evolve to any desired value according to the need in reality. However, it is not easy to realize a high-performance motion control for motor servo systems with this method since it is based on the system’s mathematical model while we could not get accurate mathematical models for the systems in reality. Then, a kind of adaptive feedback control strategy was proposed by Hu et al. 16 A parametric adaptive law was designed to estimate the parameters of PMSM servo systems which are unknown and then the estimated values are used in the feedforward cancelation item in the controller via a backstepping technique.17–19 Thus, the control performance was improved dramatically. However, in Hu et al., 16 the load torque was just regarded as a known variable, while in reality, the load torque usually varies with time and it is also unknown. Thus, the hypothesis in Hu et al. 16 is not appropriate. In fact, the load torque could be regarded as a kind of disturbance. In this case, the adaptive control cannot improve the control performance of the system and may also make the system unstable when the disturbance becomes larger and larger. Then, in Hu et al., 20 a kind of adaptive robust control strategy was proposed to suppress the chaos and improve the control performance. A parametric adaption law and a high-gain robust feedback item were designed respectively to handle parameter uncertainties and time-varying disturbance together in one controller. However, the high gain often tends to make systems unstable. Thus, it is better to design an observer to observe the disturbance which can be canceled in the controller designed later. In this way, the robust gain could be reduced and thus the system could be stable.
With the development of artificial intelligence technology, the intelligent control underwent a rapid development. Neural networks have attracted much attention and have been applied in many ways.21,22 In Feng, 23 the parametric uncertainty and uncertain nonlinearity of nonlinear systems are generally considered as a kind of system model uncertainty. Neural networks are used to approximate the model uncertainty of the whole system, and feedforward compensation technology is used to compensate the uncertainty to improve the control performance of the system. Although this method can realize the integrated design of nonlinear controller, it increases the modeling error and the approximation burden of neural network. When the system has only parametric uncertainty, this kind of controller design method is obviously inferior to the parameter adaptive control strategy based on the system model. Considering this point, we just design an intelligent compound controller which combines the advantage of neural network and the advantage of adaptive control, and it is different from the existing methods and novel. In virtue of the universal approximation of the neural network, 24 we would like to use it as an observer of load torque disturbance to estimate the load torque. Adaptive control method is used to estimate the uncertain parameters. Then, both the parametric uncertainty and the disturbance (uncertain nonlinearity) could be compensated with feedforward cancelation technique using their estimation values. At this time, the residual model uncertainty is very small and a robust item with low gain could be designed to suppress it. Thus, the system could be more stable and more accurate. In a word, an integrated controller design idea of fusing parameter adaption with neural network–based load torque disturbance estimation is proposed, in order to suppress the chaos and improve the tracking performance of the PMSM system by combining the advantages of these two methods and overcome their drawbacks. A single-layer neural network is designed to approximate and compensate the load torque disturbance, and at the same time, a model-based parameter adaption control strategy is designed to estimate the uncertain parameter to reduce the parametric uncertainty. In addition, a low-gain robust item is also designed to suppress the observation error and other compensation errors. The extensive comparative simulation results are presented in the article and they prove the validity of this method.
This article is arranged as follows. The chaotic dynamics of the PMSM servo system is analyzed in section “Problem description,” and the proposed controller is designed in detail in section “Design of the controller with neural network–based disturbance observer.” The simulation results are illustrated in section “Results of the simulation,” and finally, the conclusion is given in section “Conclusion.”
Problem description
According to Li et al., 6 the electromechanical behavior of PMSM servo system can be described by the following first-order differential equations

where
According to equation (1), some conclusions can be reached that both Hopf bifurcation and chaos would appear when some parameters of the PMSM servo system drop into a certain range.
16
For example, when the systematic parameters are as follows: σ = 10.5,

Systematic bifurcation figure.

Systematic phase figure when σ = 10.5,
In this article, our aim is to suppress the chaos since it would degrade the system’s performance and to make the system motion speed track a desired value or trajectory. Thus, we need to find some accessible manipulated variables first. From system dynamical equation (1), it can be seen that
To realize the aforementioned aim, the system state equation is built first as follows

where x1 = x, x2 = y, and x3 = z are the system states. The specific control strategy for system (2) is given in the next part.
Design of the controller with neural network–based disturbance observer
Parameter adaption
Denote

In equation (3), •i represents the ith component of the vector •.
An adaptation law is given as follows

where Γ > 0 is a diagonal matrix of adaptation rate and τ is a parameter regression law to be deduced later. For any τ, the projection mapping used in equation (4) guarantees 21


Radial basis function–based load torque disturbance observer design
Step 1. Design the structure of the radial basis function (RBF) network. RBF networks are universal approximators in that they can approximate any smooth nonlinear function within arbitrary accuracy, given a sufficient number of hidden layer neurons and input information. Here, an RBF neural network is trained online to approximate load torque disturbance

Structure of RBF network.
The input–output map of RBF network can be expressed as


where
The input of the network is taken as

where

where
Step 2. In this step, we need to design the weights adaption law. Let x1d be the desired velocity and denote z1 = x1 − x1d. Then, we could design the weights adaption law as follows

where
Adaptive robust backstepping controller design
Step 1. In this step, x2 is regarded as a virtual manipulated control variable. Then, a control function x2eq needs to be designed for the virtual control variable x2 so that the output tracking performance can be guaranteed.
According to the definition of z1, we have

Denote z2 = x2 − x2eq as the input error, and then we rearrange equation (12) as follows

According to equations (9) and (13), the resulting virtual control variable x2eq can be given as follows

where k1 > 0 is a feedback gain, and ε can be regarded as a kind of control accuracy, which is bounded and positive.
In equation (14), x2eq1 functions as a model-based compensation law through online disturbance estimation, and x2eq2 is composed of us1 and us2. us1 is a linear feedback stabilizing item which is used to stabilize the PMSM system. us2 is a nonlinear robust item which can be used to cancel the approximation error of the neural network and it satisfies the following conditions

Substituting equation (14) into equation (13), we have

Step 2. In step 1, a robust virtual control variable x2eq has been designed. In this step, an actual control law for uq needs to be designed. According to equation (2), the time derivative of z2 can be obtained as

Then, the following control law uq is proposed

where k2 > 0 is a feedback gain, and

Step 3. In this step, the parametric adaption law is designed for μ as follows

where γ is the parameter adaption rate.
Step 4. In this step, an actual control law should be designed for ud. Similarly, let x3d denote the desired output d-axis current and z3 = x3 − x3d, then a feedback control law is designed as

which ensures that the tracking error dynamics of is globally uniformly stable.
Main results
Theorem 1
With neural network–based control laws (9), (14), and (18) and parameter adaptive laws (11) and (20), the output tracking error of the system is bounded and it converges to
Proof
For proof, see Appendix 1.
Remark
Theorem 1 indicates that the proposed controller could not only guarantee a prescribed transient output tracking performance but also guarantee the final tracking accuracy. After a finite time, the tracking error can be suppressed to a given range by adjusting the parameter εs. Thus, it can be made arbitrarily small in theory. In addition, a neural network is used to estimate the load torque and an adaptive control method is used to estimate the uncertain parameters. Both the parametric uncertainty and the disturbance are compensated with feedforward cancelation technique using their estimation values. Thus, the residual model uncertainty is very small and a robust item with low gain could be designed to suppress it. Thus, the robustness of the system is strong.
Results of the simulation
The parameters of PMSM used in the simulation are chosen as follows: the number of pole-pairs pn = 4, inductance Ld = Lq = La = 0.10 H, stator resistance R = 2.5 Ω, rotor flux linkage amplitude ψf = 0.45 Wb, equivalent viscous friction coefficient Bequ = 1.27 × 10−2 Ns, equivalent inertia Jequ = 2.512 × 10−5 kg·m2. After a series of calculation, we have σ = 10.5 and μ = 25, which means the system is in the chaotic movement state. The control objective of x1 is set to be x1d = sin(t) and the control objective of x2 is still set to be x2 = 0.
The following three controllers are compared:
1. Neural network observer–based adaptive robust nonlinear feedback controller (NNARC). This is the control strategy proposed in this article, which combines adaptive robust controllers (14) and (18) with adaptive laws (11) and (19) and neural network-based disturbance observer (9).
First, we need to choose the number of nodes of hidden layer. Generally speaking, the more the number of hidden layer nodes, the higher the approximation accuracy of the neural network. However, with the increase in the number of nodes, the computational burden will increase correspondingly and the control cycle would be prolonged which would lead to a decreased control performance. Thus, it is necessary to select a suitable number of nodes. There are several empirical formula of how to choose the number of nodes such as m = log2n, in which m means the number of nodes of hidden layer and n means the number of the nodes of input layer. First, we choose the number of nodes of hidden layer according to this formula. Then, we rectify it through multiple simulation tests. Finally, we decide to choose five nodes for hidden layer.
Then we need to choose the parameters of the controller. We mainly need to tune the parameter k1 in equation (14) and k2 in equation (18). We just simply choose a large constant to implement the robust control law (14) without the control item of model feed-forward compensation x2eq1 since it not only reduces the online computation time significantly but also facilitates the gain tuning process in the implementation. After we have chosen an appropriate value for k1, we add x2eq1 in the control law. It is the same process for k2. Finally, the control gains are chosen as k1 = 1.0 and k2 = 0.2. The bounds of the parameters are given by μmin = 1.0 and μmax = 30.0. The control accuracy εs = 0.3. The initial value of μ’s estimation is chosen as 1.0. The adaptation rate matrix is set as Γ = diag{0.05, 0.05, 0.01, 0.01, 0.01} and γ = 0.15. Parameters of the neural network are chosen as
2. General nonlinear feedback controller (GNFC). This is the controller discussed in the study of Xu and Yao
1
which includes x2eq1 in equations (14) and (18), but just uses the nominal value of
3. Robust nonlinear feedback controller (RNFC). This is the controller discussed in the study of Xu and Yao 1 which includes equations (14) and (18), but there is no estimation of TL in x2eq. The controller’s parameters are the same as those of NNARC.
Two cases are tested for these three controllers.
Case 1. Load torque disturbance is a constant value
In this case, a constant load torque disturbance is implemented by applying
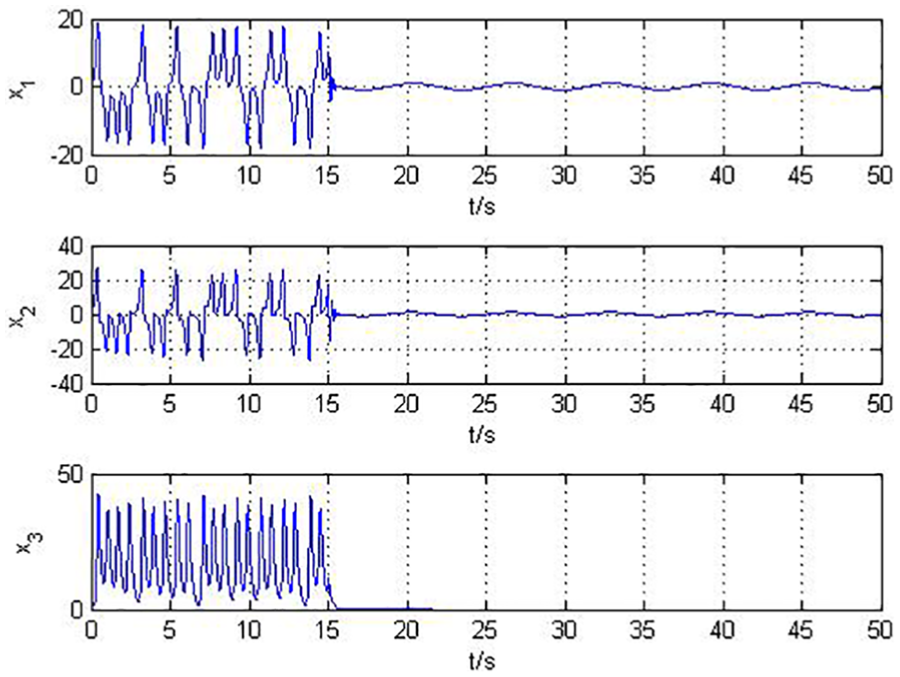
Curves of system states x1, x2, and x3 in which NNARC controller is applied when

Curves of control inputs uq and ud of NNARC controller after

Compare curves of tracking error of three controllers with constant load torque disturbance.
Case 2. Load torque disturbance is a time-varying value
In this case, a time-varying load torque disturbance

Compare curves of tracking error of three controllers with time-varying load torque disturbance.
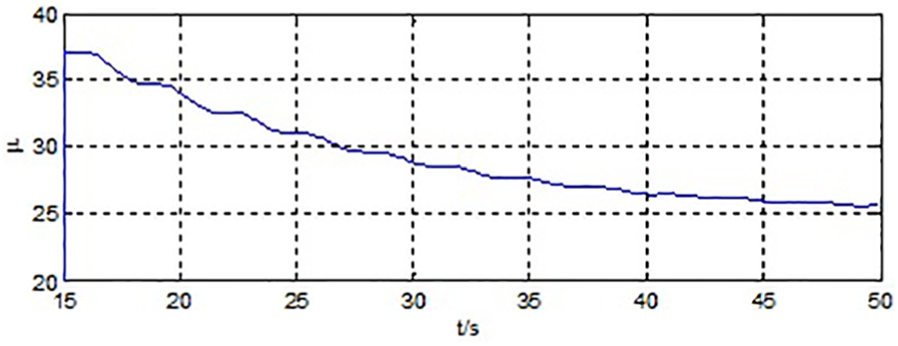
Parameter estimation in RBFARC.

Disturbance estimation in RBFARC.
Conclusion
In this article, an adaptive robust control with a neural network–based load torque disturbance observer has been proposed to suppress the chaos in PMSM and realize the high-accuracy motion control of PMSM system, which not only considers the load torque disturbance but also takes the systematic parameter uncertainties into account. Lyapunov’s method is used to prove the stability of the novel control strategy, which shows that the controller could control the chaos effectively and a prescribed tracking performance could be guaranteed theoretically in the presence of various uncertainties. Sufficient comparative simulation has been done and the results show that the proposed strategy is effective, that is, a wonderful tracking accuracy can be achieved via introducing neural network–based disturbance observer in adaptive robust control compared to the other nonlinear feedback control methods. The proposed scheme can suppress the chaos and improve the tracking accuracy of PMSM system by combining the advantages of the two approaches fundamentally.
Footnotes
Appendix 1
Handling Editor: Muhammad Akhtar
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grant 51505224, in part by the Natural Science Foundation of Jiangsu Province in China under grant BK20150776, and the Fundamental Research Funds for the Central Universities (no. 30918011301).