
Abstract
Autonomous bridge inspection operations using unmanned aerial vehicles take multiple task assignments and constraints into account. To efficiently execute the operations, a schedule is required. Generating a cost optimum schedule of multiple-unmanned aerial vehicle operations is known to be Non-deterministic Polynomial-time (NP)-hard. This study approaches such a problem with heuristic-based algorithms to get a high-quality feasible solution in a short computation time. A constructive heuristic called Retractable Chain Task Assignment algorithm is presented to build an evaluable schedule from a task sequence. The task sequence representation is used during the search to perform seamless operations. Retractable Chain Task Assignment algorithm calculates and incorporates slack time to the schedule according to the properties of the task. The slack time acts as a cushion which makes the schedule delay-tolerant. This algorithm is incorporated with a metaheuristic algorithm called Multi-strategy Coevolution to search the solution space. The proposed algorithm is verified through numerical simulations, which take inputs from real flight test data. The obtained solutions are evaluated based on the makespan, battery consumption, computation time, and the robustness level of the schedules. The performance of Multi-strategy Coevolution is compared to Differential Evolution, Particle Swarm Optimization, and Differential Evolution–Fused Particle Swarm Optimization. The simulation results show that Multi-strategy Coevolution gives better objective values than the other algorithms.
Introduction
Unmanned aerial vehicle (UAV) scheduling has been scrutinized by researchers in various application domains. Some researchers pursue green UAV operations, while some others seek to efficiently fulfill important tasks in an emergency situation.1,2 The scheduling process involves a very large combinatorial space, a plethora of constraints and uncertainties—making the scheduling problem difficult to solve. 3 The reported works comprise not only UAV applications in outdoor environments but also the ones indoor. In indoor manufacturing environment, Khosiawan et al. 4 investigated the optimization of UAV operations for inspection and material handling. UAVs are assigned to perform multiple tasks in the given environment. Nigam et al. 5 performed a study on parallel surveillance with multiple UAVs in an indoor test facility. The multiple task execution problem can be considered as a transportation problem (with zero payload or unlimited cargo capacity), where a UAV flies from one location to another to execute a task. Furthermore, a UAV executes one task after another (and possibly recharges its battery) in a planning horizon. In the transportation problem, Verderame et al. 6 address that the main challenges lie in the areas of fleet sizing, vehicle routing, and scheduling.7,8
This article focuses on the task scheduling system of bridge inspection operations using UAVs. It has the characteristic of both indoor and outdoor environments. While navigating beneath the bridge, the Global Positioning System (GPS) signal is not reliable since it is blocked by the deck. 9 The positioning system can utilize ultra-wideband, inertial measurement unit (IMU) or light detection and ranging (LiDAR). To enhance the accuracy and/or reliability, they can be combined and filtered based on the measurements’ confidence levels. This technique brings flight uncertainty into play. Being outdoor, the existence of wind causes the real flight time to deviate from the scheduled one. Another constraint is the maximum flight time, by which the operational time is limited. The objectives of the scheduling system are to optimize the combination of the task value, makespan, and battery consumption. In other words, it maximizes the throughput and minimizes the cost of operation. Such objectives require a delay-tolerant scheduling system, which measures the impact of the uncertainty. It means that the schedule overall yields an optimized objective which relates to different considered measurements of uncertainty.
Regardless of the application domain, a scheduling system can consider uncertainties to yield a robust solution. Wu et al. 10 consider a scheduling problem where the release dates of the tasks are uncertain. The uncertainty is characterized by the estimated probability distribution of the arrival time. This assumption is highly dependent on the actuality of the observations. When the behavior of one of the involved elements in the operations is changed, the value is prone to differ. Li and Ierapetritou 11 present a scheduling system which considers uncertain processing time. In the problem formulation, the authors address the processing time uncertainty which is relevant to the addressed problem in this article. The uncertainty is characterized by an estimated variability of the processing time. This is realistic when the granularity of the task is made as atomic as possible. Hence, for that atomic process, a reasonable experiment-based variability can be considered in the scheduling.
Figure 1 illustrates the impact of execution uncertainty on a schedule. The schedule instance corresponds to a plan of tasks to be executed within a given makespan

Inapplicable schedule due to execution uncertainty.
Herroelen and Leus 12 brought the insight on reactive scheduling in their study. Reactive scheduling does not cope with uncertainty in creating the baseline schedule but revises the baseline schedule when an uncertain event occurs. In this article, the identified uncertainties are taken into account during the schedule generation—discouraging nervousness on the scheduling system. The uncertain flight time and task execution are patched with calculated slacks, which act as cushions. This means that the schedule allows the whole execution to finish at its earliest end time (when no uncertainty occurs), yet still considers a near optimum cost when uncertainty occurs. Due to this behavior, the respective algorithm is named Retractable Chain Task Assignment algorithm (RCTA).
Davenport et al. 13 have studied the usage of slack-based techniques for creating robust schedules. In the reported work, the temporal protection gives a slack toward the duration of the task. The amount of the temporal protection is the duration of uncertainties that are expected to occur during the execution of the task. The distinction of the presented RCTA is that there are temporal lower slack and upper slack, whose roles are different. The temporal lower slack is responsible for handling the delayed preceding or predecessor task, while the upper one is responsible for handling the current task’s delay (see “Mathematical formulation and methodology” section for details). The earliest end time of a task is the earliest start time of the subsequent task, and the latest end time of a task takes the latest end time of the previous task into account. In this manner, the slack time of a task is sharable by all the subsequent tasks in a particular sequence, yet allowing the schedule to complete early (as if no slack is assigned at all) when no uncertainties occur. Consequently, a non-straightforward manner to evaluate the objective value of the schedule is needed and presented in the “Mathematical formulation and methodology” section.

Furthermore, researchers14,15 have investigated real-time task scheduling system in dynamic and uncertain environments. In the reported works, the points of interest (in connection with the tasks) are moving during the mission execution. Pongpunwattana and Rysdyk 14 consider the possibility of multiple UAVs to cooperate on the same task, unlike Bertuccelli et al. 15 In both works, heuristic-based approaches are used. This is due to the nature of the problems being NP-hard. The most commonly used gradient-based techniques in the past can be either costly or even impossible to obtain the minima. 16 On the other hand, heuristic-based approaches, including metaheuristics, are suitable for exploring even the unlikely area in the search space to get a near optimum feasible solution in a reasonable amount of time.
In this study, RCTA is developed for constructing the schedule from a sequence. An individual in the population during the search is a sequence of tasks. This is due to the tractable manipulation of the sequence representation, which is required during the search. The sequence is yet transformable to the detailed schedule representation (e.g. with the timestamp, trajectory, and position of interest properties) by using RCTA. For the search, a metaheuristic algorithm called Multi-strategy Coevolution (MC) is proposed. Some researchers17,18 investigate evolutionary algorithms which employ multiple strategies on subpopulations. On the other hand, MC clones the population to allow the individuals to experience each strategy simultaneously. The main population is called the elite group, where after a number of iterations will be replaced through a tournament selection of the other groups. This process iterates until the termination condition is met.
In addition, the UAV operations can be exposed to a constraint of maximum total makespan T
max
. Depending on the sequence of execution of the task, the respective flight cost to go to the point of interest can be different. This constraint becomes an input for RCTA. RCTA assigns a task into the schedule when the total makespan is less than
The main contributions of this study are listed as follows:
Developed RCTA to construct a schedule from a sequence.
The constructed schedule incorporates slack time which acts like a cushion. Hence, the start time of a following task can be retracted as early as the end time of a preceding task. Yet, the latest end time takes into account a realistic slack time in connection with the task type and the required flight.
Developed Multi-strategy Coevolution algorithm to perform the search.
This metaheuristic algorithm allows each individual in the population to be exposed to each strategy at the same state. The elite group is cloned according to the number of search strategies, and each clone group is exposed to a search strategy. The clone groups are linked to the elite one through a tournament selection which is done every couple of iterations. The result of the tournament selection replaces the elite group. This process iterates until the termination condition is met.
The remainder of the article is organized as follows. The description of the problem is addressed in the “Problem definition” section. The proposed methodology: RCTA and MC are explained in detail in the “Mathematical formulation and methodology” section. The results of numerical experiments and analysis are presented in the “Numerical simulations” section. The concluding remarks of the study are then presented in the “Conclusion” section.
Problem definition
This work investigates the scheduling of multiple-UAV operations in a bridge inspection, which considers execution delays due to flight uncertainty. There are multiple tasks representing multiple inspection areas throughout the bridge. UAV performs the given tasks in accordance with the environment specifications.
4
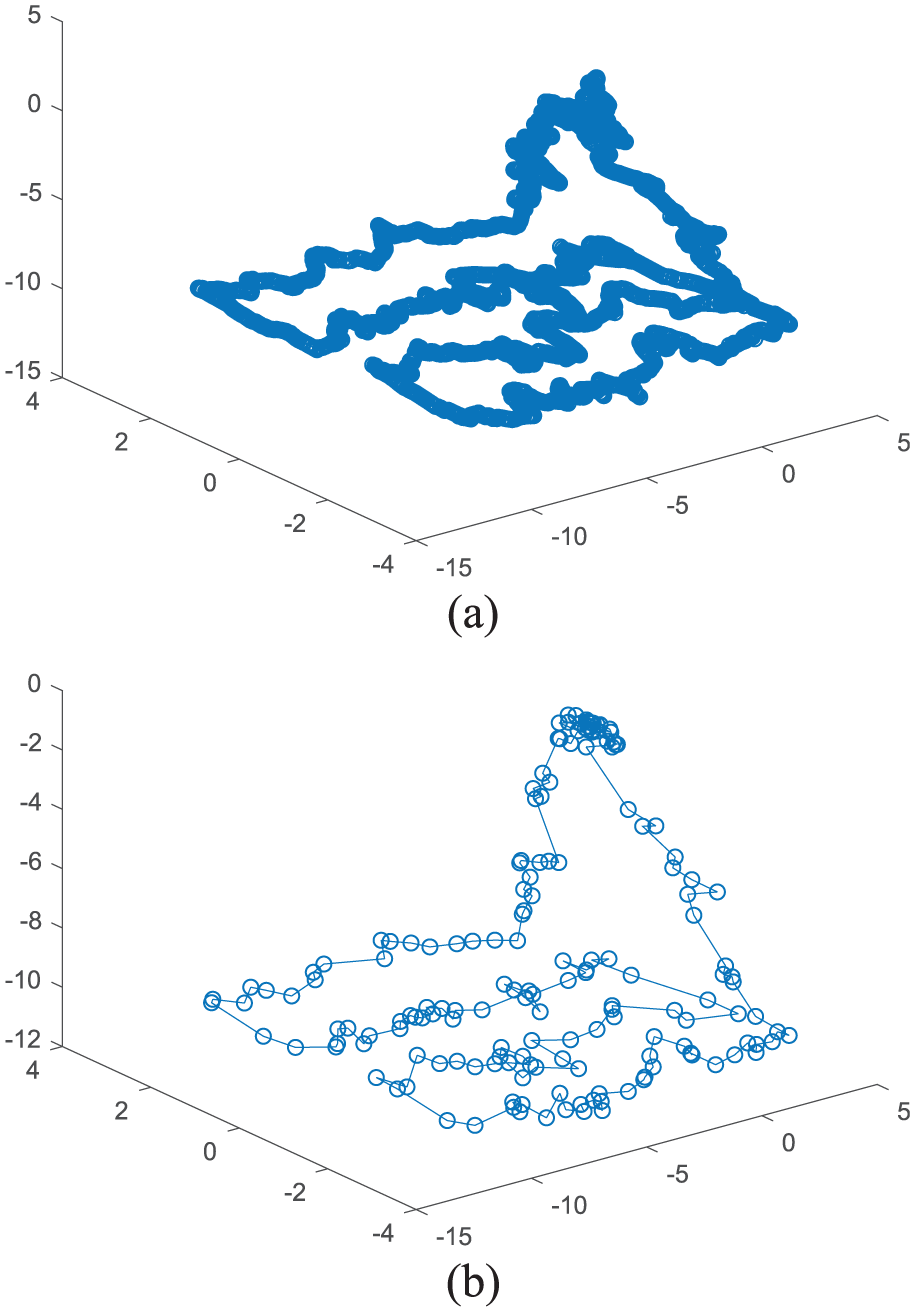
In a given time horizon, the corresponding tasks are planned as a schedule, which will be executed afterward. A UAV executes a task at a time, and the task can only be executed once. Since the task is executed at a particular geographical location, the position data become a relevant factor to look at. The values in the data are influenced by the flight uncertainty factors such as the mechanical condition of the UAV, the environmental condition (e.g. wind), and the measurement data from the positioning system during the task execution. In Figure 2(a) and (b), the planned flight path andits execution are depicted through waypoints (o) and paths (-). The flight uncertainty causes the execution to deviate from the planned flight. The deviation distances for all planned waypoints are measured. Through a one-sided t-test (with the null hypothesis of the mean distance equals 0, against the alternative where the mean is greater than that), they are statistically significantly deviating from the planned ones—with

(a) Planned flight path and (b) its execution uncertainty.
Upon the observation of the data, the flight approaching and leaving a waypoint tend to experience delays. This corresponds to the aforementioned flight path deviation during the execution. While approaching a target waypoint, the UAV slows down and checks whether it has arrived at the desired position. When the UAV is within <1 m radius, it considers that it is at that particular location. This is related to the dimension of the UAV which can be represented at least as a sphere with a diameter of 0.5 m. As the required confidence gets higher, getting an accurate actual position measurement can take longer time. Furthermore, to fly toward the subsequent waypoint, the UAV might need to adjust its orientation (in respect to the Euler angles). Thus, the magnitude of the waypoints contributes to the scale of the delayed flight execution time.
To deal with such an operational environment, the schedule shall be delay-tolerant. This means that the comprised tasks in the schedule are neither under- nor over-assigned—in respect to the involved constraints (e.g. battery consumption, maximum makespan). This is measured through the robustness of the schedule in the proposed approach.
This study addresses the problem of multiple-UAV scheduling system with a delay-tolerant awareness. Multiple inspection tasks are performed by multiple UAVs, whose execution time uncertainties can delay the scheduled completion time. The tasks can have precedence relationship, and the predictive execution time is determined. A fixed-time schedule of the tasks introduces high nervousness, in which flight conflicts arise and a high operational cost is incurred. An approach which is based on slack time is proposed in this study. Consequently, a task schedule is encapsulated by an earliest start time and a latest end time—other properties are explained in detail in the “Mathematical formulation and methodology” section. A corresponding schedule instance is depicted in Figure 3. The overlapping timespans of tasks assigned to a UAV (e.g. timespans 0–48 and 44–55 on UAV 101) are related to the proposed method which is explained in the “Mathematical formulation and methodology” section. Upon the schedule completion, the remaining battery power of a UAV is ensured to be sufficient for returning back to recharge station. For conciseness, the final trip back to recharge station is not explicitly included in the schedule.
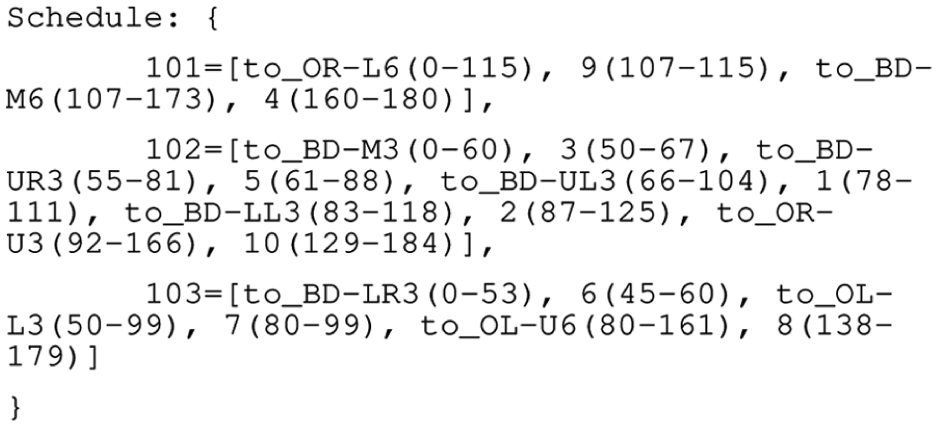
Illustration of a schedule instance.
In coherence with the aforementioned goal, the objectives of minimizing makespan and battery consumption are pursued through schedule optimization. The primary objective is to minimize the makespan of schedule


Correspondingly, the tasks have task values, whose total is maximized. The task value correlates to the proportion of a task in completing the whole bridge inspection. The more in depth the (inspection) task type, the higher the task value. Furthermore, the processing time increases as the task type gets more in depth. Task value and processing time of different task types are depicted in Table 1. The types of the task include large-scale (e.g. on the deck surface), detailed (e.g. on the hanger), and hands-on inspections (e.g. on the joint of the hanger and the deck, and the joint of the hanger and the arch or the foundation). The regions of interest on the bridge are illustrated in Figure 4. A large-scale inspection can be done through image processing, 19 a detailed one can be with ultrasonic, 20 and a hands-on one can be a coordinated combination of both.
Task type.


Regions of interest on the bridge.
Moreover, a task might have predecessor tasks. A predecessor task is a task which is not necessarily assigned right before a particular task, but its completion must be prior to the commencement of the particular task. It differs from a preceding task, which is assigned right before a particular task in a UAV’s schedule.
In addition, a subproblem with a maximum makespan limitation is addressed. When the maximum makespan is limited, the primary objective is to maximize the total task value (equation (3)), followed by minimizing the battery consumption (equation (2)). The detailed mathematical formulation is presented side by side with the proposed methodology in detail in the “Mathematical formulation and methodology” section

The backbone of the problem addressed in this article can be considered as traveling salesman optimization problem. This problem is known to be NP-hard, 21 where mathematical approaches require a significantly increased amount of time as the problem grows. 22 Hence, the mathematical approaches are only suitable for small-scale problems in practice.
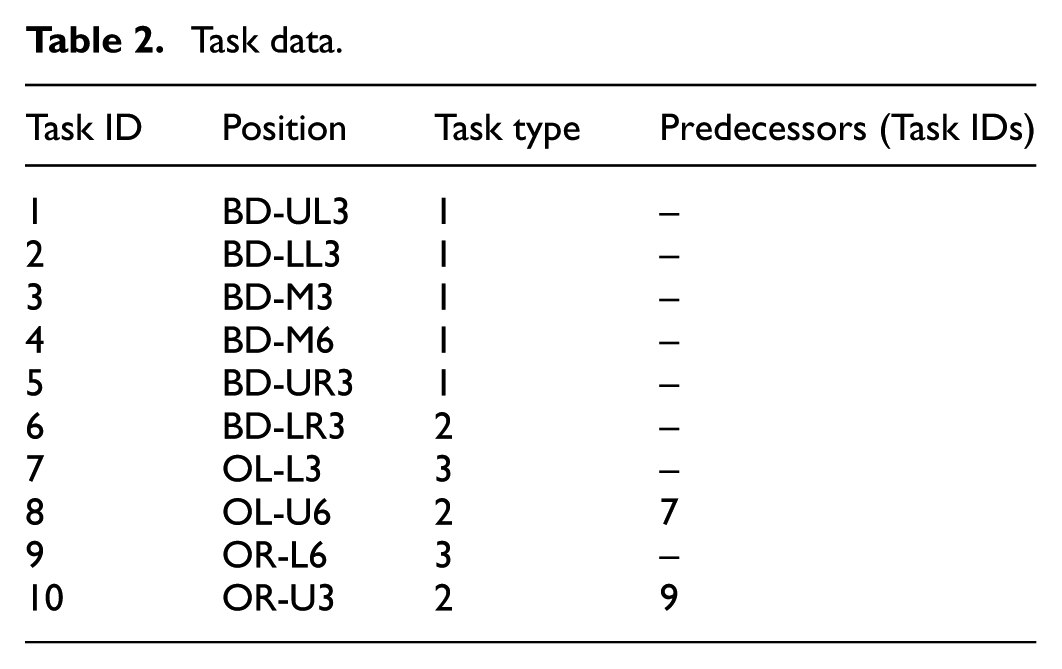
The case which is used in the “Numerical simulations” section is depicted in Figure 5(a). The forward part of the bridge is shown with the available waypoints and paths; see Figure 5(b) for more emphasis on waypoints and paths. Figure 5(c) depicts an isometric view which mostly covers the view beneath the arch of the bridge, illustrating the labeled waypoints and paths which are used during the scheduling. A corresponding instance of task data is depicted in Table 2. The aforementioned schedule instance in Figure 3 comprises the tasks in Table 2. In this study, the simulation focuses on the flight uncertainty, while the task execution uncertainty is addressed in the proposed method. Hence, the scope of this work serves as a progress toward the delay-tolerant multiple-UAV scheduling system.

Forward part of a bridge.
Task data.
Mathematical formulation and methodology
RCTA
In the UAV operations, there are uncertain events which can affect the schedule execution. This leads to the deviation of the real flight time from the scheduled one. The motivation of generating the schedule is to optimize the combination of total task value, makespan, and battery consumption. When a schedule which considers no uncertainty is executed under an environment with uncertainties, the purpose of the schedule becomes undermined. Hence, the proposed methodology seeks a delay-tolerant schedule, which overall yields an optimized objective which relates to different considered measurements of uncertainty.
RCTA allows a flexible amount of time between two adjacent tasks in a schedule. A temporal lower slack is used in consideration of the preceding and predecessor tasks. The earliest start time of task

The latest start time of task

When no delay occurs, the schedule hence can be executed as if no slack is assigned—yet the slack time can be used by every subsequent task in a particular sequence. When the latter part of the schedule is prone to more delay (e.g. by the delay that occurred in the beginning of the schedule), the unused former slack provides more tolerance.
Equation (6) states the earliest end time of task

Equations (7) and (8) show the latest end time of task


A task has a specialization as an action; it can be a flight, wait-on-ground, hover, or battery replacement action. A flight action has uncertainty in its execution time. On the other hand, hover, wait-on-ground, and battery replacement actions have no execution uncertainty, setting the slack time to zero. In connection to this classification, the slack time of a task can be


The value of
(a) Whole and (b) sampled ROS messages around the planned waypoints.
Furthermore, the UAV velocity is calculated and modeled based on previously obtained flight data. The flight data comprise the positions and timestamps of the UAV while operating at a constant velocity. A normal distribution is fit to the data, where
Equations (11) to (13) depict the battery level calculation. The battery consumption of task





Structural representation of a task schedule.
In the case where maximum makespan limitation

Flowchart of Retractable Chain Task Assignment algorithm.
MC
To search the solution space, a metaheuristic algorithm called Multi-strategy Coevolution algorithm is proposed. In principle, it utilizes linked clone groups which run different strategies during the search. The fitness evaluation of a solution candidate during the search is based on the defined objective(s).
The objective function of minimizing the makespan of schedule


The usage of the natural logarithm is to avoid excessive slack time. This is because the value which is subtracted from

When the maximum makespan limitation exists, the objective is to maximize the total task value

The aforementioned objective functions are primary for the, respectively, mentioned cases (i.e. without and with maximum makespan limitation). In both cases, the primary objective function is followed by a secondary objective of minimizing the battery consumption

The detailed procedure of MC is explained as follows, and the respective flowchart is depicted in Figure 9.
Step 1. Initialize the parameters of the utilized strategies. For MC itself, initialize the size of population
Step 2. Generate the initial swarm based on the priority rules which are intuitively believed to produce good starting points. When the number of priority rules is less than
Step 3. If
Step 4. Clone
Step 5. For each iteration, each clone group will execute its strategy on a certain individual to produce a new candidate
Step 6. In the end of an iteration, increase
Step 7. For every

Flowchart of Multi-strategy Coevolution algorithm.
Furthermore, the robustness level of the schedule is calculated in a straightforward way. For every task (i.e. action or task) in the schedule, the scheduled time is compared against the one from the simulation. If the simulated execution time is contained inside the scheduled one, it is put into the set of conformed tasks

Numerical simulations
In the numerical simulations, scenarios of inspection on a site depicted in Figure 5 with 2 up to 10 UAVs are carried out. The number of tasks
DE
DEFPSO
MC
PSO
DE, PSO, DEFPSO, and MC
In the following figures (Figures 10–14), the measurement of the schedule properties is depicted in boxplots and fitted lines. A boxplot depicts the distribution of data based on the five-number summary (minimum, first quartile, median, third quartile, and maximum). A fitted line depicts a local polynomial regression fitting
26
with

Makespan of the schedule based on the simulations.

Battery consumption of the schedule based on the simulations.

Robustness level of the schedule based on simulations with (a) limited and (b) large number of competitive alternative paths.

Computation time of the schedule generation based on the simulations.

Simulations with maximum makespan limitation.
At a glance, the makespan of the schedule is obviously decreased when more UAVs are used (see Figure 10). However, this observation needs a further investigation on its robustness. Through the simulations, more waiting time due to the high path occupations are found. More delays are exposed and the robustness of the schedule is decreased. On the other hand, this condition has a compensation when the tasks are more distributed to the higher number of UAVs. Distinctly assigned areas are likely to produce optimized makespan, the sequence assigned to each UAV is not long, and hence the battery consumption can be decreased. In a different setup, where more alternative paths are available, the robustness deficiency can be alleviated at the cost of longer makespan and battery consumption.
The effects of the occupied path and the less assigned tasks (to each UAV) keep pulling each other. Figure 11 depicts this phenomenon. In the beginning, the battery consumption is decreased as the number of UAVs begins to increase. As it gets higher (the exact number differs from one algorithm to another), the overhead cost of departing and going back from and to the base is increased. Since the paths are clogged, a higher amount of waiting time is exposed—which can create more delay and decrease the robustness. In opposition to that, the more distributed tasks yield less tasks for each UAV to execute, and the battery consumption for that is less. As a result, a sin-like pattern can be seen in the depicted boxplots.
The robustness degrades as the limited number of paths (especially when they depart from one single station/base) is clogged by numerous UAVs. Figure 12(a) depicts the consequence of the delayed completion time caused by the frequently occupied paths. It makes the execution time of the planned tasks deviate from the schedule. This degradation can be reduced by tracking the path occupation during the schedule generation. This brings a drawback of an increased computation time, though. In addition, the respective schedule potentially has more hover actions, whose total battery consumption is not attractive. Moreover, the diminishing robustness in the presented result helps to indicate the effective number of UAVs to be used.
To present a further investigation on such a phenomenon, the robustness levels of schedules considering a large number of competitive alternative paths are presented in Figure 12(b). It means that an alternative path exists when the shortest one is occupied, and their costs are equal. Another factor which degrades the robustness level as the number of UAVs increases is the diminishing cumulative buffer effect. When the tasks are highly distributed, each UAV has less assigned tasks. This leads to less unused slack time which can be contributed from the former to the latter part of the schedule. Notice that the UAV engine failure is not included in the simulation in this study.
In connection with the performance of the proposed metaheuristic algorithm, schedules from MC have less makespan and battery consumption than DE, PSO, and DEFPSO. Furthermore, the lower bound of the robustness is slightly better than others. The computation time of the schedule generation with MC is reasonable, even though it is not the fastest one (see Figure 13). This can be seen as the trade-off with the better other properties of the generated schedule. Correspondingly, performing the operations with 2 UAVs looks reasonably good in this case study.
Numerical simulations for operations with maximum makespan limitation are also conducted. The results are depicted in Figure 14 and the respective analysis is presented as follows. Let
Means of the numerical simulation results.

DE: Differential Evolution; DEFPSO: Differential Evolution–Fused Particle Swarm Optimization; MC: Multi-strategy Coevolution; PSO: Particle Swarm Optimization.
The best values among the compared algorithms are marked with asterisks, and the ones yielded by MC are shaded (when the values from all algorithms are equal, no asterisk is given).
The schedule makespan is decreased as the tasks are more distributed among the UAVs. The corresponding computation time scales, in regard to the solution space which gets bigger following the higher number of UAVs. As depicted in the previous case

Robustness level of schedule based on simulations with
Table 3 lists the mean makespan
Conclusion
This study investigates a delay-tolerant scheduling system for bridge inspection operations. A constructive algorithm called Retractable Chain Task Assignment algorithm is presented. RCTA is tailored for assigning slack time on the task schedules. RCTA is incorporated with a proposed metaheuristic algorithm called Multi-strategy Coevolution to search the solution space. MC utilizes linked clone groups to perform multiple strategies separately and yet share the best solution throughout the entire search. Furthermore, the elite group (which is cloned to form the other groups) is replaced every several iterations through a tournament selection of the other groups. The generated schedules are compared against simulations to measure the robustness level. A diminishing benefit behavior as the number of UAVs increases is found, and the appropriate number of multiple UAVs in proportion to the scale of the tasks and environment (map) can vary. The effectiveness of the proposed method is proportional to the well-balanced scales of the map and the UAVs. Furthermore, MC outperforms the DE, PSO, and DEFPSO in terms of the schedule objectives (makespan and battery consumption). The robustness level of MC is on par with the other algorithms. In terms of computation time, MC is inferior toward PSO while being on par with the others. This is consistent on both cases: with and without the maximum makespan limitation.
Footnotes
Acknowledgements
The authors would like to thank Weikun Zhen for his prompt feedback during the flight data analysis.
Handling Editor: Bailing Tian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work has partly been supported by Innovation Fund Denmark under project UAWorld (grant agreement number 9-2014-3) and National Science Foundation–National Robotics Initiative (NSF-NRI) grant.