
Abstract
A three-dimensional (3D) point cloud registration based on entropy and particle swarm algorithm (EPSA) is proposed in the paper. The algorithm can effectively suppress noise and improve registration accuracy. Firstly, in order to find the k-nearest neighbor of point, the relationship of points is established by k-d tree. The noise is suppressed by the mean of neighbor points. Secondly, the gravity center of two point clouds is calculated to find the translation matrix T. Thirdly, the rotation matrix R is gotten through particle swarm optimization (PSO). While performing the PSO, the entropy information is selected as the fitness function. Lastly, the experiment results are presented. They demonstrate that the algorithm is valuable and robust. It can effectively improve the accuracy of rigid registration.
Introduction
3D point cloud registration is widely applied in computer vision, computer graphics and so on. It is always a research hotspot in the computer field. In recent years, information science and technology have developed rapidly.1–11 The field represented by artificial intelligence has achieved fruitful scientific research results.12,13 Numerous descriptions have been proposed from rigid registration to nonrigid registration. 14 Rigid registration is a challenging work. It is because there is noise and unwanted points in the data and the original positions affect algorithm performance. Therefore, there is still much work to perform, such as removing the noise15–17 and improving the registration accuracy and so on.
Rigid registration
For the original point cloud P and the target one Q, where there are a lot of overlapping between the two, the rigid registration is to find the rotation matrix R and the translation matrix T to transform the original point cloud to the target one. The equation is defined as

where
Transform constraint
The nearest point method can be solved by establishing constraint potential consistency correspondence. It is to complete the final registration by selecting the nearest point as consistent correspondence point. The iterative closest point (ICP) is solved by establishing the following constraint condition

Due to the good performance of ICP, many scholars have proposed many improved algorithms to improve the computation speed and robustness.18–20
Feature constraint
The geometric properties of point cloud, such as curvature and normal vectors, remain unchanged in rigid transformation.21,22 Vary features can form an eigenvector. For the higher the eigenvector dimension, the lower the probability of all the features which can be matched, the high-dimensional eigenvectors can simplify data. Many surveys propose registration methods of feature constraints.23–25 However, such method needs that the features of point cloud are obvious and easy to be extracted, and more time will be spent in the process of feature extraction. Kase et al. 26 proposed the extended Gaussian curvature, and a matching rate equation is used to determine the difference between the corresponding point sets. The extended Gaussian curvature is defined as

where
Significance constraint
The significant areas are different from the surrounding areas. Significance can be used to measure local information to detect the key points or key areas.27–29 The significance is usually used to reduce the potential mismatch points. The significance methods are usually geometric scale spatial analysis, significant scale and curvature based on vision, multi-scale sliding, maximum stability region extremum, and so on.
Regularization constraint
Regularization is constrained by adding penalty terms to the target function. Regularization constraint contains prior information, which avoids the occurrence of local minimum value and improves the search efficiency. Gold and Rangarajan 30 proposed that the rigid registration is regarded as a continuous optimization problem and dealt with problem between rigid transformation and consistency correspondence. The regularization term based on entropy is defined as

where M is a consistency correspondence matrix. According to the definition of entropy, when all points achieve registration, the entropy reaches the maximum.
Search constraint
Search constraint is mainly aimed at improving registration efficiency, including localization method and hierarchical search method. Jost and Hugli 31 proposed a method that speeds up the iteration of ICP with the above coarse to fine search technology and is refined gradually to obtain a more reliable consistency correspondence.
Contribution of this article
From the descriptions above, it is shown that 3D point cloud registration is the fundamental in computer field and still has many problems to further study and discussion. Our survey aims to solve the two rigid problems: (1) getting rid of the noise and (2) improving the accuracy. The challenge work in our article is how to improve the accuracy using the search constraint. The contributions of the article are introduced in the following:
The k-d tree is used to build the relationship in point cloud to find the k-nearest neighbor (KNN) of the point, where the mean filter is employed to optimize the neighbor of the point. The noise of the point cloud is removed.
The method of calculating the entropy of the point cloud is introduced in this article. It is used as the fitness function in particle swarm optimization (PSO) to search the best R. The results of the experiment show that our method effectively improved the accuracy.
Problem formulation
Point cloud registration is used to seek consistent correspondence between different datasets and to transform the different coordinate systems into the same coordinate system to gather the full data of object. Due to the limitation of 3D scanning technology, different datasets are usually obtained from different observation points. Each observation point is in a different coordinate system, so point cloud registration is an important aspect in 3D data acquisition. Point cloud registration is divided into rigid registration and nonrigid registration. Our method is the rigid registration and starts with formula (1) to find R and T. How to efficiently find R and T and improve the accuracy are the main problems solved by us. However, how to remove the noise is also a challenge work which we have to face.
Related work and main results
Definition of entropy and particle swarm algorithm
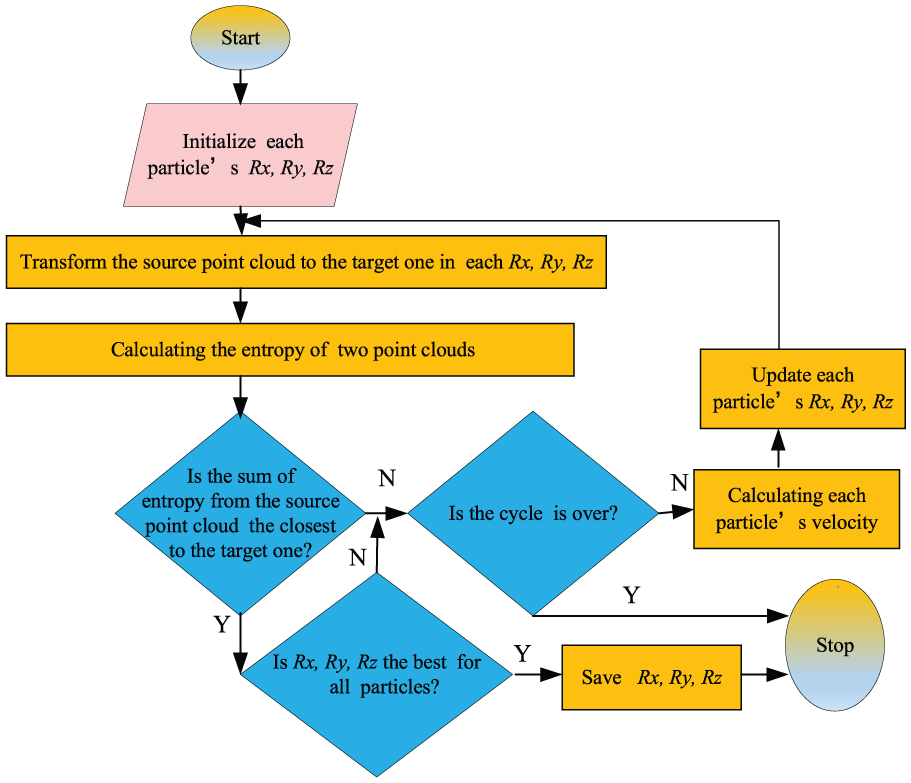
We propose entropy and particle swarm algorithm (EPSA) to achieve rigid registration. The process of our algorithm is shown in Figure 1. First, the original and target point clouds are the input data. Then, the EPSA descriptor uses k-d tree to find the KNN of the point, where the mean filter is used to get rid of the noise. Second, the EPSA descriptor calculates the center of two point clouds to find the translation matrix T; the information entropy is defined to calculate the entropy of the two point clouds; and PSO, which is the search constraint, is employed to search the rotation matrix R at random. The stopping criterion in PSO is that the entropy of the original point cloud is the closest to the target one. Once R and T are found, we can achieve the registration.

Illustration of EPSA.
k-d tree
k-d tree is also named as k-dimensional tree. It is a high-dimensional data structure and applied in searching the KNN such as the KNN matching in high-dimensional image feature vectors in the image retrieval, that is, optimization of KNN algorithm. The k-d tree is a high-dimensional binary search tree. Unlike the common binary search tree, the tree stores the k-dimensional data.
In the searching process, the k-dimensional data need to decide from which dimension the data are selected. Then, the data are compared with the root node in the selected dimension. How to select the dimension and ensure the number of nodes in the left subtrees is as equal as possible to the right one after selecting dimension are two challenge works to face. In order to select the dimension, the variance in each dimension is calculated and the dimension of the largest variance is selected; for the larger the variance, the more the data disperse. The right and left subtrees are divided according to the pivot value to ensure the number of nodes in the left subtrees is as equal as possible to the right one. Table 1 shows the data structures in each node of the k-d tree.
Data structures of k-d tree.

From Table 1, it can be seen that building k-d tree is a hierarchical recursive process. The pseudo-code is shown as follows:
Step 1. If Step 2. Call the node generating function. (a) (b) Step 3. dataleft = (d Step 4. Left_Range = Range && dataleft. Step 5. dataright = (d Step 6. Right_Range = Range && dataright. Step 7. left = CreateKDTree(dataleft,Left_Rang), the parent of the left is set to K_d tree. Step 8. right = CreateKDTree(dataright,Right_Rang), the parent of the right is set to K_d tree.
In this article, k-d tree is used to establish the relationship between points to find the KNN of the point. Once the KNN of the point is found, we use mean filter to get rid of the noise. For KNNs of point

Therefore,
Information entropy
The definition of information entropy is proposed by Shannon. 32 It is applied in calculating the average amount of the information. The information associated with the probability of data. The lower the probability, the more is the information which the event carries. The amount of the information conveyed by each event depends on the random variable’s value. The value is the information entropy.
In this article, the information entropy is developed to calculate the entropy of point cloud. First, we need to project the point cloud to the

where

where

where


The frequency.
PSO
To find the rotation angle to generate point-to-point correspondence, we study the optimization algorithm33–35 and we research PSO. PSO is a populate algorithm to solve the optimization problems. 36 The particles move in the whole search space. A candidate solution is represented by a particle. According to the rules, each particle searches the better position. The basic formula of PSO is defined in the following


where D is the spatial dimension; X is the particle i’s position; V is the particle i’s velocity;
The particle of PSO in this article starts by generating random rotation angle within an initialization region (0°–360°). The particle’s velocity is usually set to zero or to small random values in order to make the particle move in the search space during the first iterations. Once the stopping criterion is met, the velocities and rotation angles of the particles are no more updated in the algorithm. The stopping criterion in the algorithm is that the
Flow diagram of PSO.
Experimental simulation
This experiment is performed in MATLAB R2012b and the datasets are from Stanford’s experimental database.
Robustness
In order to assess the robustness of the noise, the experimental dataset contains two models (“cow” and “feet of man”). In the test, we use eight nearest neighbors of each point and add the random noise to the point cloud. The result is shown in Figure 4. From the results, we find that the descriptor is workable when facing such a challenging case.

Assessing the robustness of the noise: (a) cow, (b) cow adding noise, (c) cow removing noise, (d) feet, (e) feet adding noise, and (f) feet removing noise.
Registration accuracy test
In order to test the registration accuracy, the experimental dataset contains three models (“bunny,”“cow,” and “man”). The dataset used in complete overlapping is shown in Figure 5 and in partial overlapping is shown in Figure 6. The red one is the original point cloud and the blue one is the target point cloud.
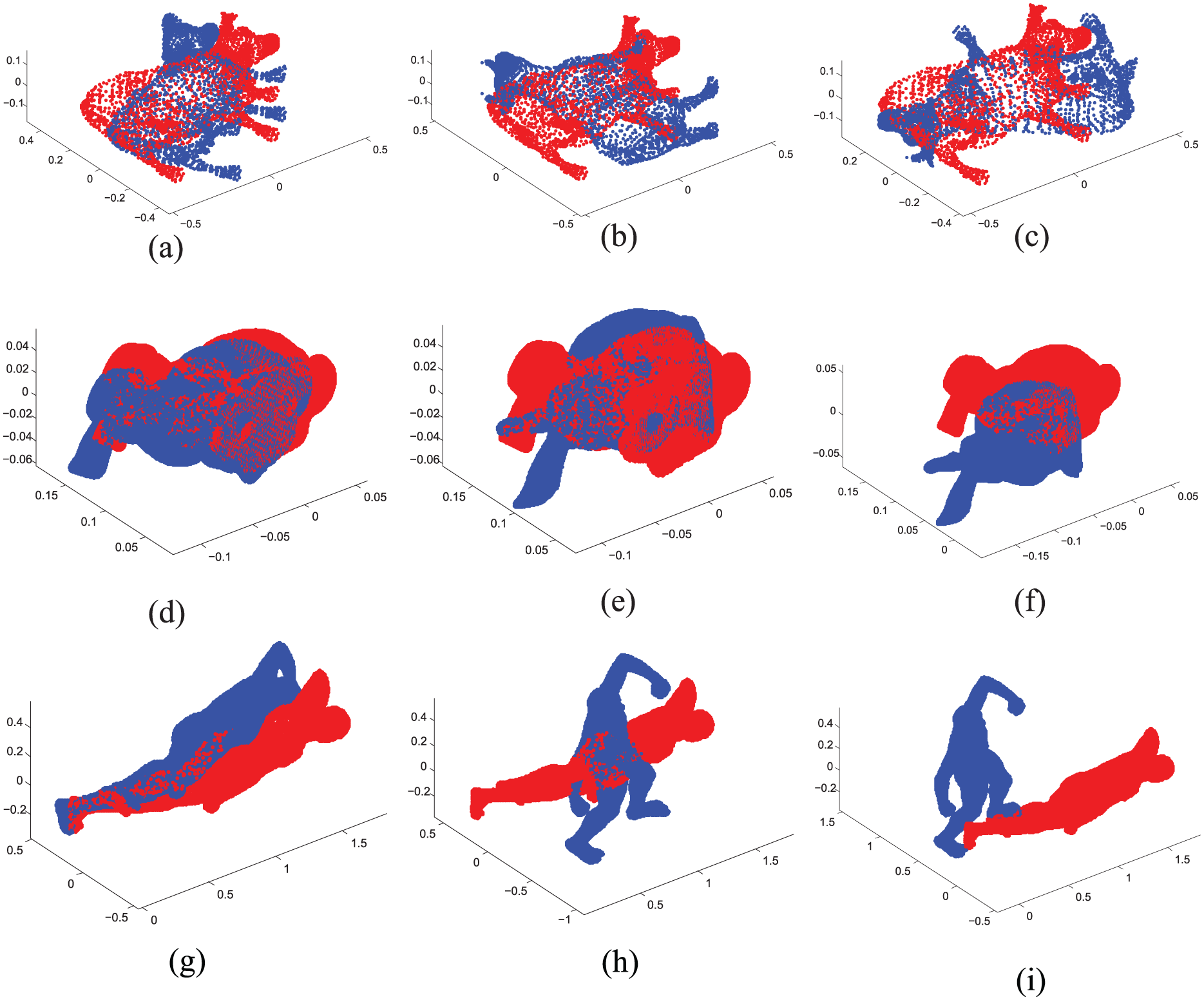
Dataset used in complete overlapping: (a) cow-view1, (b) cow-view2, (c) cow-view3, (d) bunny-view1, (e) bunny-view2, (f) bunny-view3, (g) man-view1, (h) man-view2, and (i) man-view3.
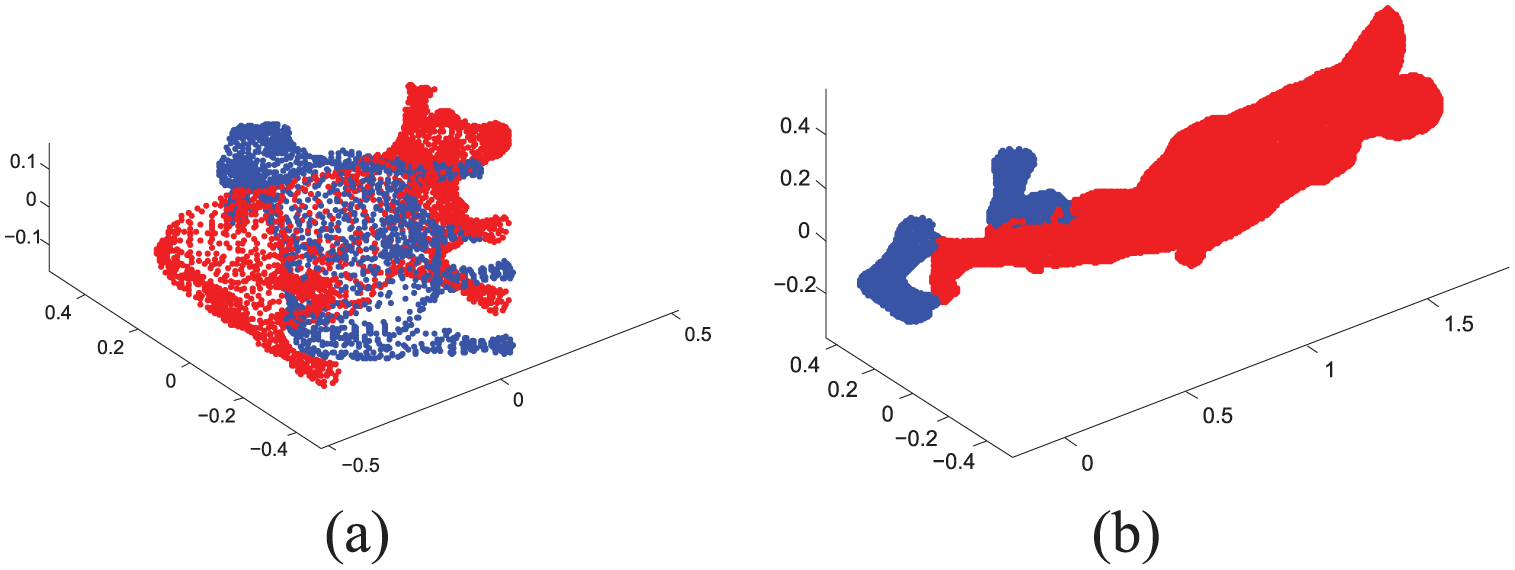
Dataset used in partial overlapping: (a) cow and (b) man.
Performance of EPSA
We calculate the mean square error (MSE) to further test the performance of EPSA. MSE is defined in the following

where
In order to make the data in experiment, first, we calculate the center of gravity of two point clouds. For the point cloud

where
Step 1. Set the number of iterations, M, and the number of randomly generated rotation angles, N. Step 2. Set Step 3. The rotation matrices Step 4. The original point cloud is transformed in Step 5. The differences Step 6. Find the minimum e in Step 7. Set Step 8. Enter the loop. (a) Set (b) (c) The original point cloud is transformed in (d) The differences (e) Find the minimum e in (f) Compare (g) If the number of iterations, M, ran out, exit the loop. If not, repeat steps (a) to (f).

Experimental flow.
Case of the point cloud completely overlapped
Case of the point cloud completely overlapped is that the data of the point cloud belong to the complete object model and reflect the complete shape of the object. The results in complete overlapping are shown in Figures 8–10, and Table 2 shows the size of the experimental datasets and the
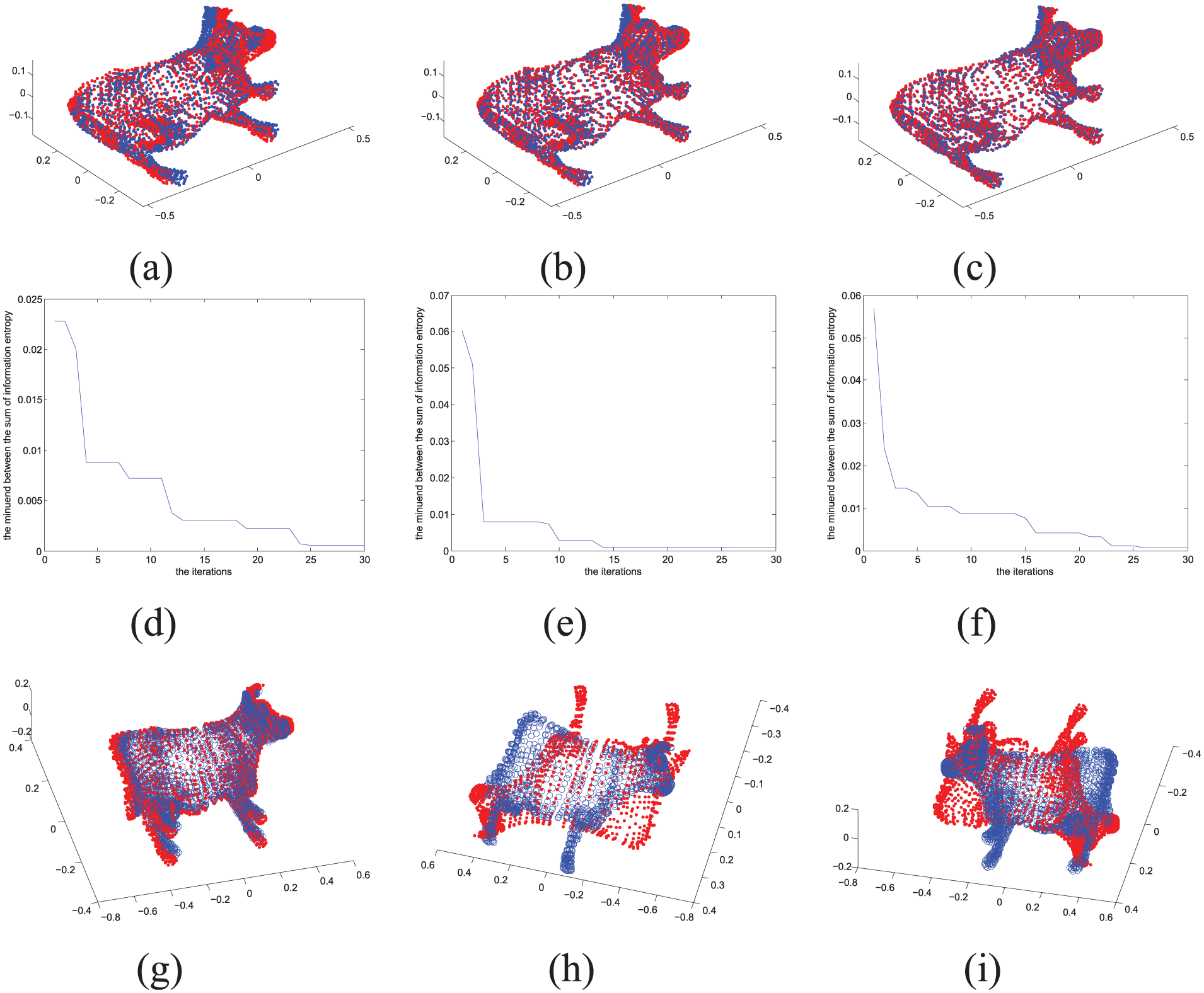
Experimental results of cow: (a) result, cow-view1 (EPSA); (b) result, cow-view2 (EPSA); (c) result, cow-view3 (EPSA); (d) curve, cow-view1 (EPSA); (e) curve, cow-view2 (EPSA); (f) curve, cow-view3 (EPSA); (g) result, cow-view1 (CPD); (h) result, cow-view2 (CPD); and (i) result, cow-view3 (CPD).
Experimental results of bunny: (a) result, bunny-view1 (EPSA); (b) result, bunny-view2 (EPSA); (c) result, bunny-view3 (EPSA); (d) curve, bunny-view1 (EPSA); (e) curve, bunny-view2 (EPSA); (f) curve, bunny-view3 (EPSA); (g) result, bunny-view1 (CPD); (h) result, bunny-view2 (CPD); and (i) result, bunny-view3 (CPD).

Experimental results of man: (a) result, man-view1 (EPSA); (b) result, man-view2 (EPSA); (c) result, man-view3 (EPSA); (d) curve, man-view1 (EPSA); (e) curve, man-view2 (EPSA); (f) curve, man-view3 (EPSA); (g) result, man-view1 (CPD); (h) result, man-view2 (CPD); and (i) result, man-view3 (CPD).
MSE in complete overlapping.

MSE: mean square error; EPSA: entropy and particle swarm algorithm; CPD: coherent point drift.
Case of the point cloud partially overlapped
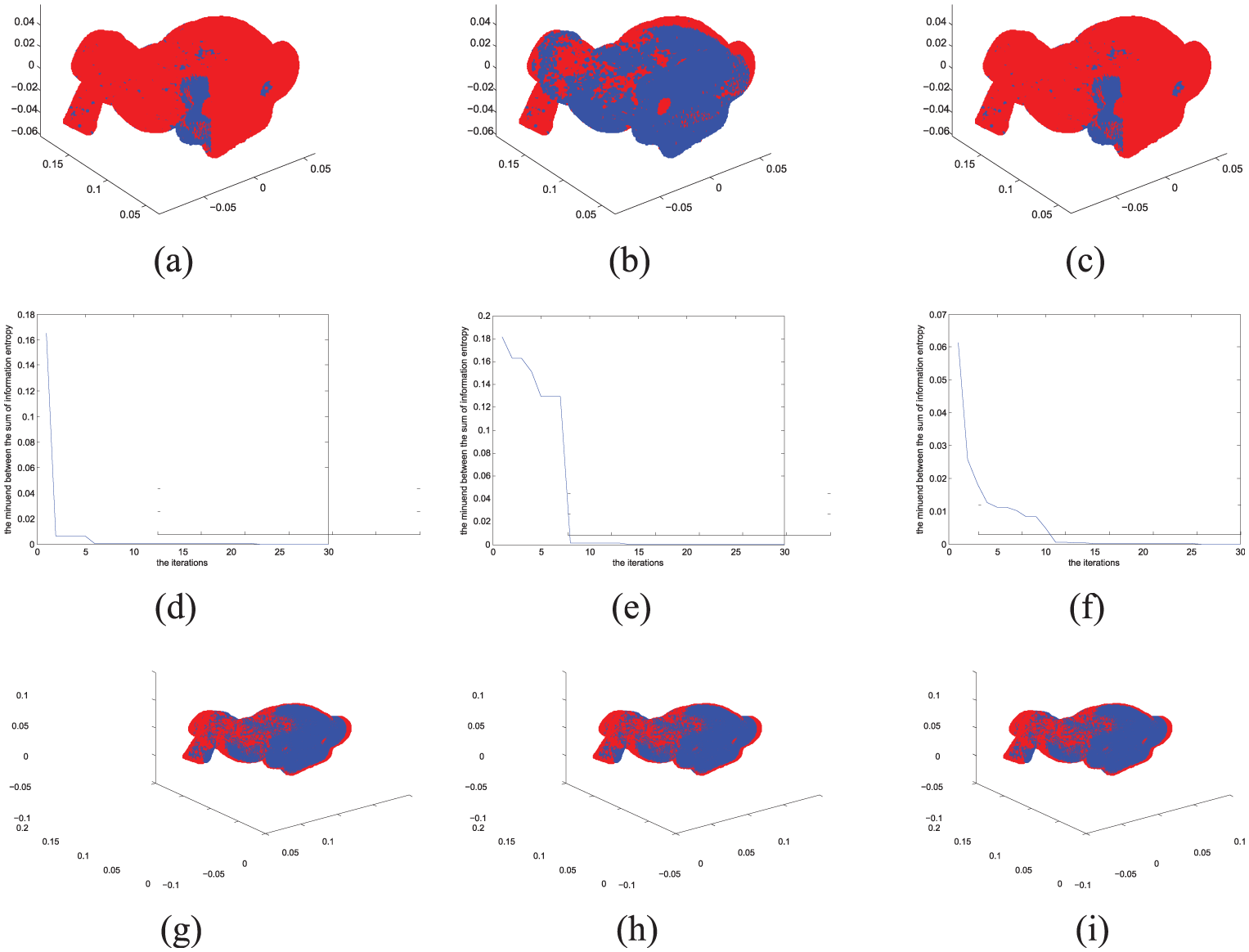
Case of the point cloud partially overlapped is that the data of the point cloud are only part of the object. The results in partial overlapping are shown in Figure 11, and Table 3 shows the

Experimental results in partial overlapping: (a) curve-cow (EPSA), (b) result-cow (EPSA), (c) result-cow (CPD), (d) curve-man (EPSA), (e) result-cow (EPSA), and (f) result-cow (CPD).
MSE in partial overlapping.
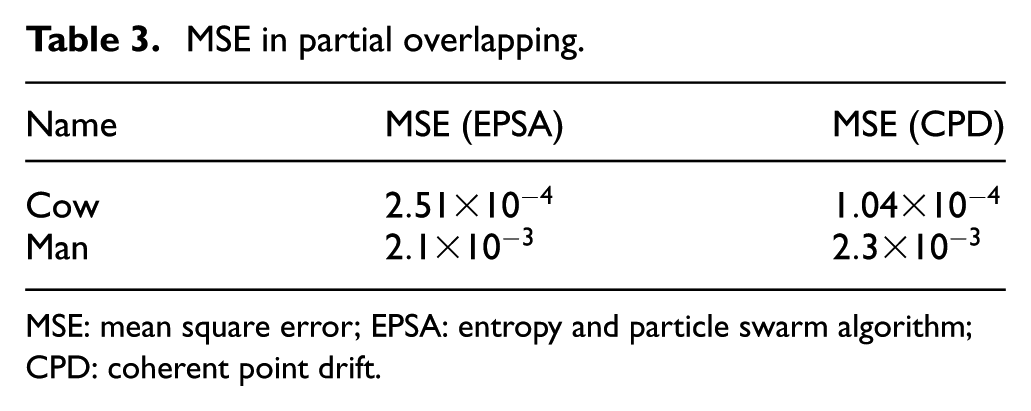
MSE: mean square error; EPSA: entropy and particle swarm algorithm; CPD: coherent point drift.
From Figures 8–11 and Tables 2 and 3, we find that the experimental datasets achieved the high correct rate followed by the proposed descriptor.
Conclusion
In this paper, a 3D point cloud registration based on entropy and particle swarm algorithm is proposed. Firstly, to find the k-nearest neighbor, the k-d tree is employed in the point cloud to establish the relationship in the points. The noise is suppressed by the mean of neighbor points. Secondly, in order to improve the registration accuracy, the gravity center of two point clouds is calculated to find T and the search constraint is used to find the best R. Once the R and T are found, the original point cloud can be transformed to the target one. Lastly, the experiment results are presented. They demonstrate that the algorithm is workable.
Footnotes
Handling Editor: David R Salgado
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was jointly supported by the National Natural Science Foundation of China (grant nos 11705122, 61803098, and 61803305), the Research Foundation of the Department of Education of Sichuan Province (grant nos 17ZA0271, 16ZA0263, 17ZB0194, 18ZB0418, 18ZA0357, and 18ZA0357), the Open Foundation of Enterprise Informatization and Internet of Things Key Laboratory of Sichuan Province (grant nos 2016WYJ03 and 2017WZY01), the Open Foundation of Artificial Intelligence Key Laboratory of Sichuan Province (grant nos 2016RYJ04, 2015RYJ03, 2016RYY01, 2017RZJ02, and 2017RYJ01), the Open Foundation of Sichuan Provincial Key Lab of Process Equipment and Control (grant no. GK201612), the Open Foundation of Material Corrosion and Protection Key Laboratory of Sichuan province (grant no. 2017CL09), the Innovation Platform & Key Project of International Cooperation of General Institutes of Higher Education of Guangdong Province & Overseas (including Hong Kong, Macao, and Taiwan; grant no. 2015KGJHZ025, Natural Science), Research & Innovation Foundation of General University Graduate of Jiangsu Province (grant no. CXZ Z13_0659), Sichuan Science and Technology Program (grant nos 19ZDZX0037, 2018JY0197, and 2016SZ0074), the Sichuan Key Provincial Research Base of Intelligent Tourism Foundation (grant no. ZHZJ18-01), and the Natural Science Foundation of Sichuan University of Science & Engineering (grant nos 2018RCL17, 2018RCL18, 2017RCL10, 2017RCL52, and 2017RCL12).