
Abstract
In this article, an optimal method of unmanned aerial vehicle selection for following a moving ground target is presented. The most suitable unmanned aerial vehicle from an aircraft operating fleet is selected for tracking task. The aircraft choice is done taking regarding the unmanned aerial vehicle distribution in the mission zone, individual performance of fleet platforms, and maneuverability of a ground platform. The unmanned aerial vehicle fleet members’ flying qualities are various, so an optimization process is used to assign an aircraft to follow the ground target. A target trajectory prediction is embedded in tracking algorithm. The simulation results demonstrated the effectiveness of algorithms developed, and in-flight demonstration proved the possibility of realization of computed trajectories by the unmanned aerial vehicle.
Introduction
A tracking of moving objects by unmanned aerial vehicles (UAVs) is investigated by many authors.1–4 In this research, the tracking task was a part of wider mission that contains three phases: Locate, Target, and Track (LTT). The optimization of Locate and Target tasks was subject to other research optimized within the project OpUSS—“Optimization of Unmanned System of Systems”—performed at Warsaw University of Technology under a research grant agreement with Lockheed Martin Corporation. The main objective of OpUSS project was to create and implement a methodology that optimizes the performance of a UAV fleet for the LTT mission at each phase. It was realized using multilevel optimization methods for each task of the LTT mission. For the Track task, the optimization was used for the selection of the most proper and useful UAV for following the moving object and generation of tracking trajectory. The optimization of third—Track—task is presented in this article. The novelty of the research shows multilevel optimization, taking into account as well the model of the UAVs and the estimation of the escaping object’s trajectory. The presented method considers the UAV’s performance and fuel/energy resources. The main difficulty of the research was to apply such an algorithm that may be used onboard, so the calculation can be done in real time. The algorithm and method were developed and tested in virtual environment (computer simulations), but to prove its applicability, the method was applied in real flight, with the use of set of various UAVs.
One of the key elements of optimization was the selection of the best aircraft for tracking. The process takes into account the performance and maneuverability of each fleet member, actual positions of aircraft, and estimated available flight time durations based on remaining fuel/energy consumption.
There are several references published, which concern target tracking. In some of them, stochastic methods1,3,5 were used for generating tracking trajectory; in others, a deterministic approach2,4 was investigated. To optimize the path of a tracking vehicle, various methods were used, such as Markov decision processes 1 or dynamic programming.6–8 In this article, an approach used to solve the tracking problem is delivered. Next, the method of selection of an optimal aircraft for tracking is described, followed by a description of UAV/target models, track algorithm, and target motion prediction method. The simulation findings illustrate the applicability and effectiveness of the algorithms developed, and flight tests proved the applicability of the results in practice.
UAV optimal selection for tracking phase
The non-moving object on the ground was searched in the mission zone and has been identified by a member of UAV fleet. Being found, the object starts moving on the ground. This is the initial situation for research described in this article. A decision must be undertaken which UAV from in-the-air operating fleet over the mission area will be used to track the running object. The followed object performance is known in general, but its trajectory is not known in advance by the tracking fleet and may vary during the Track phase. The main factors taken into account, which influence the selection of UAV for tracking, are as follows:
Fleet distribution in the mission area when the target is detected;
Estimated remained flight duration of each UAV performing tracking, based on fuel/energy consumption and assumed the “worst” target escaping trajectory;
UAV maneuverability depending on UAV type, which is attached to the UAV model;
Target maneuverability, which is considered in an object model.
The main criterion for selection of an optimal aircraft is the estimated tracking time duration, depending on fuel/energy consumption. The fuel consumption is considered in both mission phases: reaching the target and tracking the target.
An UAV and an object trajectory are considered as a movement on a two-dimensional (2D) space, which means that the UAV altitude is constant. An example of random fleet distribution over the mission area when an object was found is presented in Figure 1. The distances of UAVs to the object and its initial position are presented. The UAV are placed randomly, and their distances

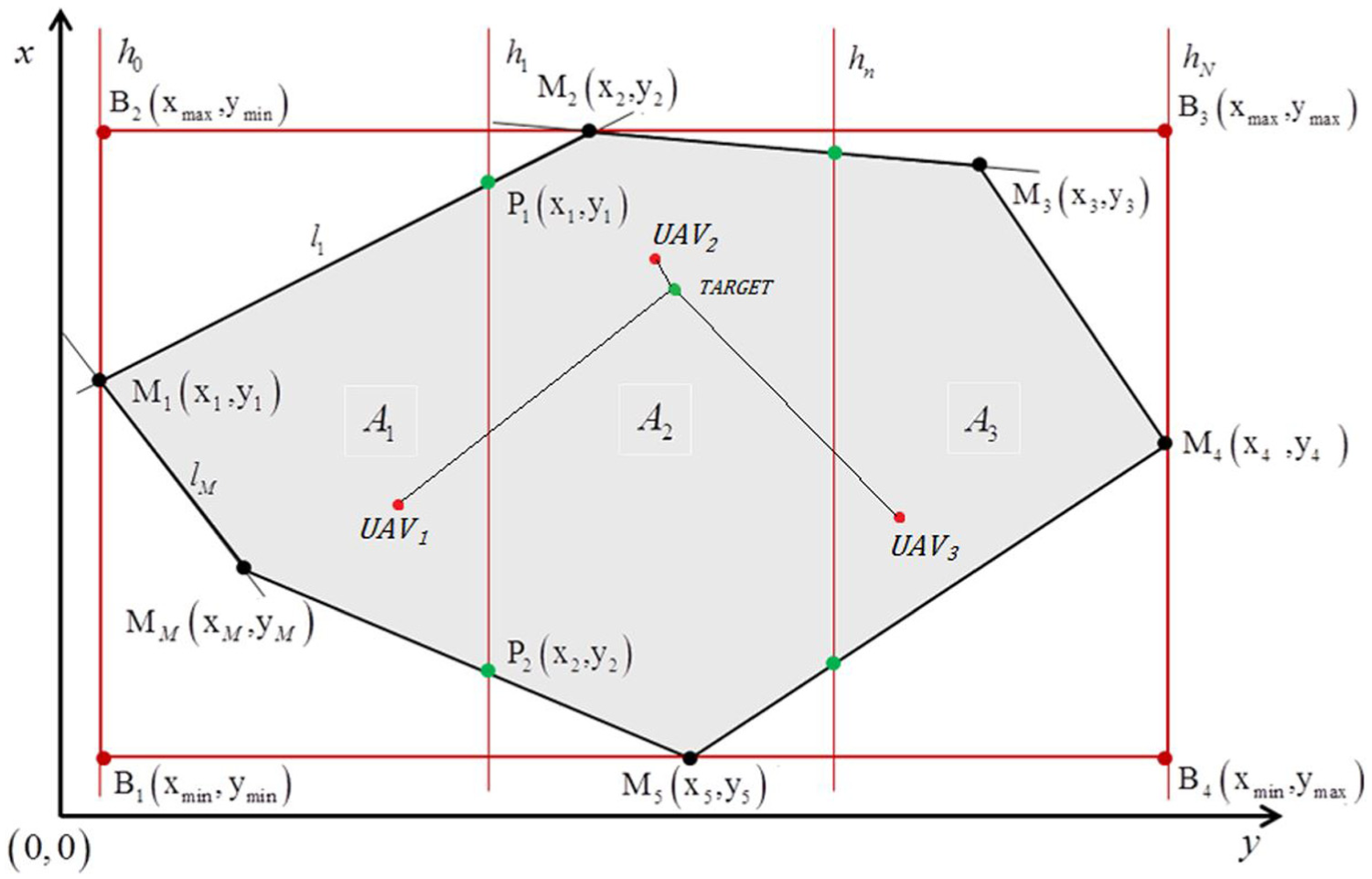
Search area definition.
The fuel/electrical energy consumption by a UAV is estimated by the following formulas:
For piston engines

For electrical engines

where

By inserting equation (3) into equation (4), the following expressions for fuel/energy consumption is delivered

The crucial factors that have an impact on the fuel/energy consumption are air density, distance flown, flight velocity
Vehicle models
In the literature, various models of vehicle motion may be found for trajectory optimization processes, like Dubins car,9,10 full dynamics aircraft model, 11 or models based on transfer functions12–15 identified during tests in flight. In optimization processes, the model complexity influences the selection of an applied method and computation time. Usually, for simulation efficiency, the applied model is not very complex. This is the case in this research, but the software structure allows to make it more comprehensive in the future research. An UAV and the object to find are modeled as a maneuvering point. An UAV flies at a fixed altitude. Both—UAVs’ and object’s—trajectories are expressed by two parametric equations in horizontal plane of north-east-down (NED) coordinate system

UAV and object motion are presented by kinematic equations




The UAV is subjected to constraints imposed on:
Horizontal velocity: minimal

Roll angle—stall constrains

The minimum turn radius calculated as

Aircraft turn radius may also be taken from measures in experimental flights. Target velocity is constrained by maximum engine power

An algorithm for target following
The object following algorithm is a deterministic one, based on the method developed in Rafi et al.
2
and Ruangwiset.
4
In Figure 2, parameters crucial for the tracking algorithm are illustrated. Point

Bearing selection.
At each time step, calculations are done as follows:
Actual target position
Predicted target position
Heading change
The UAV position in consequent step is calculated using aircraft model

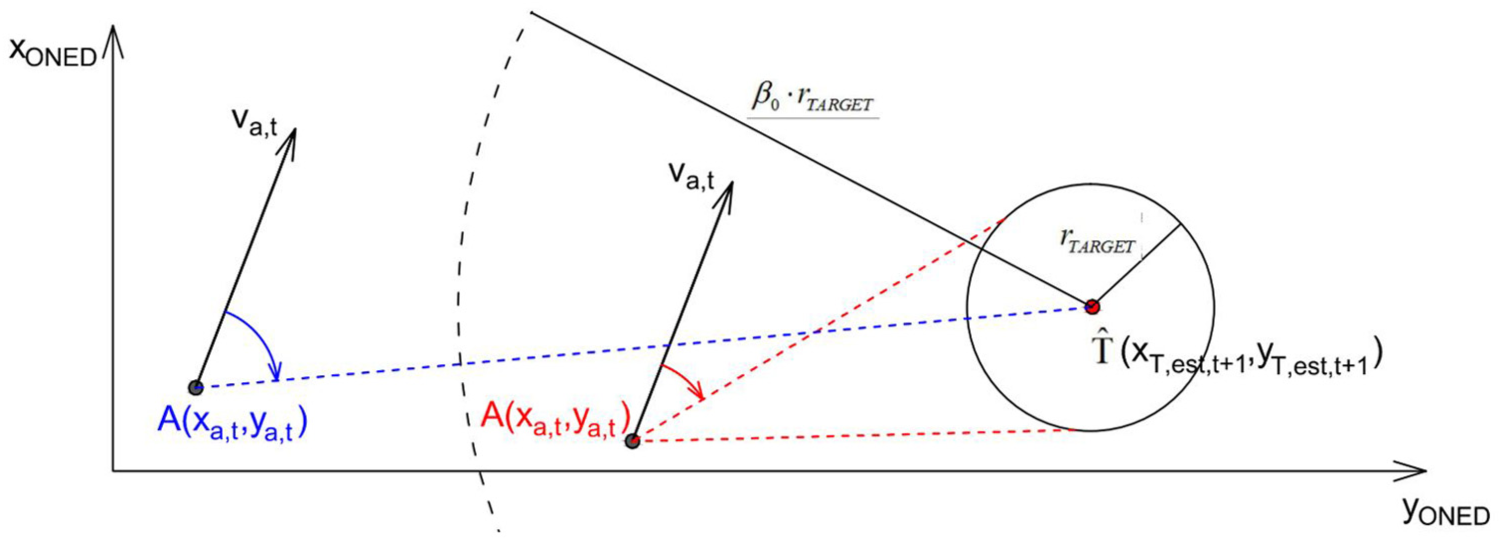
The heading changes along the UAV, and depends on the actual value of parameter β, that is, the relative distance between UAV and the object. The fixed β0 value was assumed to improve the algorithm efficiency. For each instant of time one of the three cases may be encountered:
The UAV is inside an object circle, that is, 0 < β < 1. If so, the heading rate is constant and does not change,
The UAV is outside the object circle, however closer than assumed relative distance β0, that is, if 1 < β < β0. In this case, the target tracking algorithm described below is applied.
The UAV is further than β0, that is, β > β0. If so, the aircraft heading is selected straight to the target (a dotted line AT in Figure 3).

Target tracking algorithm steps.
The object following algorithm developed here and applied in case 2 is described now. In Figure 4, point


Mean and maximum distances to the target as a time step function.
To calculate the angles τ1 and τ2, the bearing

Angles τ1and τ2 are calculated as

and the incremental change

where

else

If the actual angle between aircraft velocity vector and the tangent direction is smaller than a maximum change of an aircraft turn angle in one time step, then the heading change is



The advantages of presented method are that it is not necessary for extensive onboard calculations and a fact that a deterministic approach assures the solution repeatability for constant parameters.
Simulation results
In this section, the results of simulation of the tracking algorithm are summarized within two groups of calculations. First one concerns the assessment of dependence of the target tracking algorithm results on the algorithm internal parameters:
Time step
Relative distance to the target
Target circle radius
The second group concerns sample computations of tracking paths for various UAVs and target motion parameters. Finally, comparison of simulated trajectories with experimental flight results is presented. All calculations were done using MATLAB R2014b software. To assess the quality of tracking process, two indicators were calculated for the whole duration of the tracking task—first one, a mean distance to the target

where

which indicates whether the target is all the time within the sensor field of view. To test the algorithm properties, three different aircraft models were used, due to their availability for flight tests; the aircraft performance data are given in Table 1.
Aircraft performance data.

Investigation of algorithm properties
In this section, the target tracking algorithm sensitivity to its internal parameters is discussed. There are three algorithm internal parameters crucial for simulation efficiency:
Assuming a constant velocity of an aircraft, the time step was changed within range from 0.1 to 2 s. Other values set in simulation are given in Table 2.
Simulation parameters (time step).

The time step duration significantly influences the maximal distance, but not so much the mean to the target (Figure 4). The longer is a time step, the greater is the maximum distance to the target; for time step of 2 s, it is about 56% larger than for time step of 0.1 s. Increasing the time step results in slightly larger mean distances to the target (23% more for 2 s than for 0.1 s).
The tracking trajectories obtained for 0.1 and 2 s time steps are compared in Figure 5. The larger time step results in the deterioration of algorithm performance (longer trajectories), which is coherent with engineering understanding of the process. Such a situation may appear when a sampling time in an onboard sensor, which reflects the distance and relative position to the target, is high due to sensor performance or severe weather conditions.

Aircraft trajectories for time step t = 0.1 s and t = 2 s.
The parameter
Simulation parameters (relative distance).


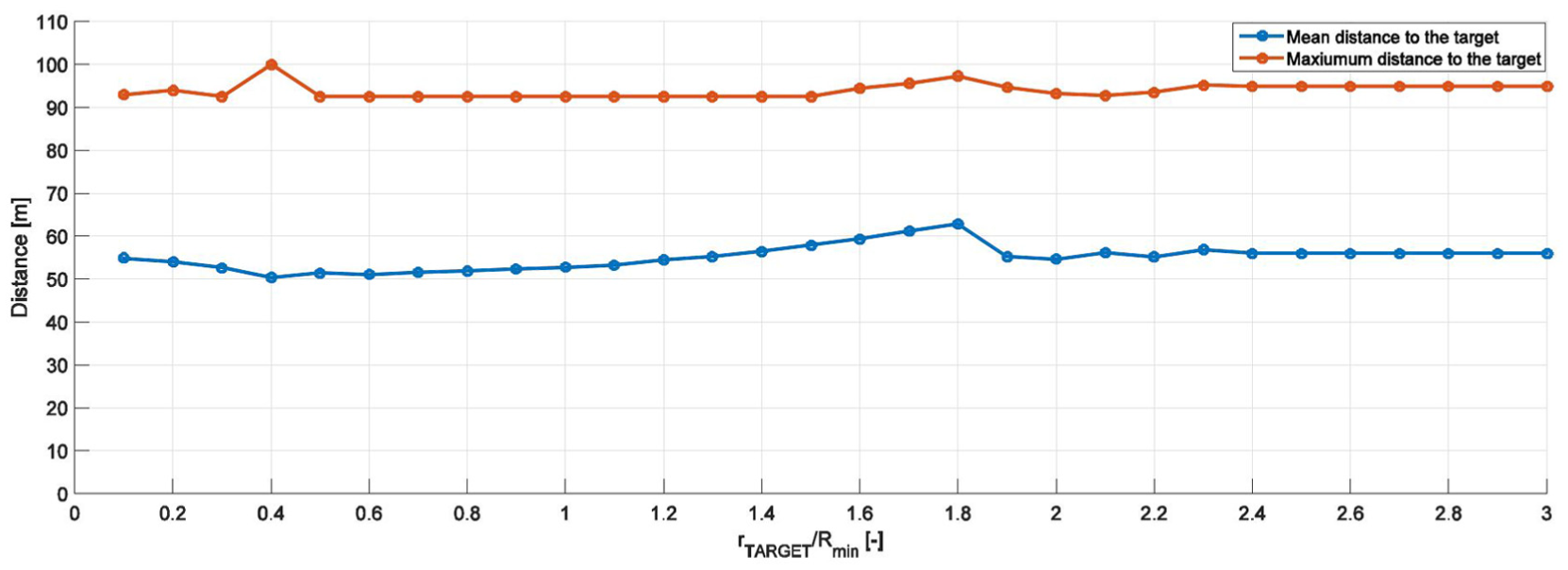
Mean and maximum distances to the target in β0 function.
For both cases, the influence of this parameter on tracking efficiency is not substantial. For REKIN aircraft, larger

The value of
Simulation parameters (target circle radius).

Mean and maximum distances to the target in Π function.
When increasing the value of
UAV/target motion parameters
In this section, the influence of target trajectories and target/aircraft velocity ratio
UAV performance used in simulation.

UAV: unmanned aerial vehicle.
The tracking trajectories are presented in Figure 8.

Trajectories for straight-line target trajectory: T-REX—green, REKIN—blue, and CITABRIA—yellow.
T-REX (helicopter) has available velocity only slightly larger than the target; therefore, it is compensated by making sinusoidal movements, sufficient to directly follow the target. The airplanes (fixed-wing): REKIN and CITABRIA due to much higher flight velocities compared to the target velocity perform loiter around moving point.
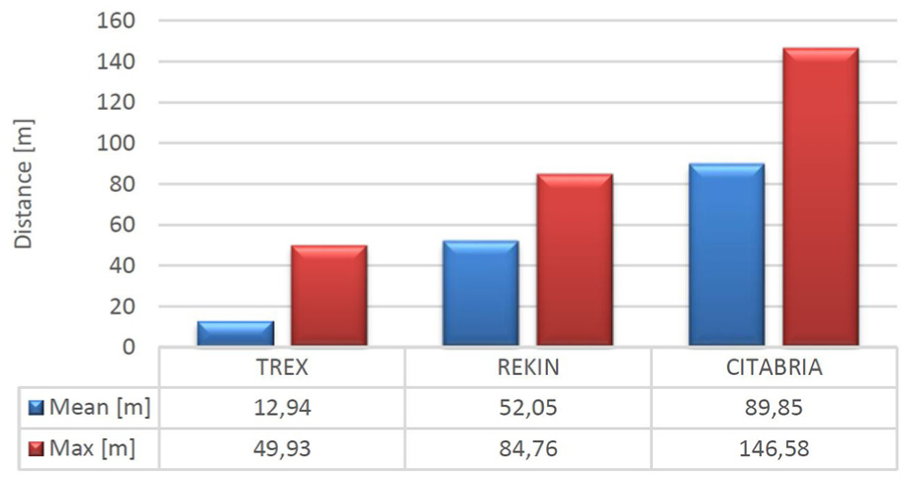
In Figure 9, the tracking quality indicators are presented for each case shown in Figure 9. The higher mean and maximum distances to the target for quicker flying aircraft are intuitively explainable, which prove that the algorithm operations are proper. A similar analysis was done for zig-zag trajectory. In Figure 10, trajectories for all three UAVs are shown.

Mean and maximum distances to the target for all UAVs for straight-line target trajectory.

Trajectories for zig-zag target trajectory: T-REX—green, REKIN—blue, and CITABRIA—yellow.
The zig-zag “non-smooth” target trajectory has larger influence on rotorcraft than on fixed-wing UAVs, which results from velocity ratios. In the zig-zag corners, helicopter needs more time to reach the target than the fixed-wing loitering around the target.
The comparison of maximal and mean distances to the target for zig-zag trajectories, presented in Figure 11, reveals the same trends as in the straight-line case. But, there is largest relative change for T-REX, which suggests that the quality of tracking by rotorcraft is influenced by the shape of trajectories more than fixed-wing.
Mean and maximum distances to the target for all UAVs for zig-zag target trajectory.
Velocity ratio
In this section, the algorithm behavior is investigated for various target/UAV velocity ratios

Mean and maximum distances to the target as a velocity ratio function.
For the velocity ratio
Comparison between simulation and experimental flights
In this section, the simulated trajectories are compared with demonstrations in flight. The tracking trajectories were calculated for rotorcraft UAV (T-REX) flying with horizontal velocity of 4.5 m/s, tracking the target moving along the straight line with constant velocity of 3 m/s. On the simulated trajectories, the waypoints were selected, with mean distance between two simulated waypoints were about 10–15 m and downloaded to rotorcraft autopilot. The helicopter flight trajectories with respect to required waypoints are presented in Figure 13. The rotorcraft followed the waypoints with assumed accuracy of 15 m. This result proves the applicability of computed for real tracking flight. In Figure 14, the distance is shown between points of helicopter trajectory obtained from simulation and nearest points from experiment. The mean distance to the reference (simulation) trajectory was 2.33 m and the maximum inaccuracy was 6.64 m.

Simulated and experimental trajectories comparison.

Distance between simulated and experimental trajectory points.
Conclusion
The tracking of a ground-moving platform by an UAV is considered in the article. The tracking algorithm starts with the first step—a method for selection of the best UAV from the fleet distributed throughout the mission zone, based on one-step optimization. The kinematic models of aircraft and target are used, including their maneuverability. The objective of optimization is to achieve the longest tracking time taking into account the actual fuel/energy consumption. The tracking algorithm was developed considering the aircraft maneuverability, which significantly have an impact on the tracking trajectory. The algorithm properties were investigated showing efficiency in performing tracking for various types of UAVs. Having such strong results, the simulation could be taken into the real flight tests. The presented method’s complexity is not high, so its applicability in real flight was possible. Due to the algorithm simplicity, the calculation could be performed onboard. The test on an airfield has been performed and the applicability of simulation results was proved by demonstration in flight with the use of various UAVs fleet. Further research would consider applying the method and integrating the estimating the trajectory along with the sensors feedback (cameras and lasers). Furthermore, the method’s applicability should be tested for a wider spectrum of various UAVs.
Footnotes
Appendix 1
Handling Editor: Dumitru Baleanu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper was prepared within project OpUSS—Optimization of Unmanned System of Systems—performed at Warsaw University of Technology under research grant agreement with Lockheed Martin Corporation supported by Drs Derreck Holian and Karen Duneman.