
Abstract
Impact is a universal phenomenon and has serious influences on the dynamic characteristics of mechanical system, so it is critical to accurately describe the effects of impact. In this work, a numerical and comprehensive method is presented to calculate the impact force in clearance joint during impact process, which has higher effectiveness and accuracy than the most popular used L-N model. Different from traditional contact models, where the coefficient of restitution is assumed to be a constant value nearly to 1 during impact process, the improved model in this work sets up the model of restitution coefficient related to two important parameters for impact phenomenon, which are initial impact velocity and the yield strength of the materials in clearance joints. A great number of numerical and experimental results are introduced and compared to validate the improved contact force model; it needs to be highlighted that the numerical results are based on the improved model and the most popular impact force model presented by Lankarani and Nikravesh, and the experimental results are based on two typical pendulum experimental test rigs. It can be concluded that (1) when compared to the experimental results, the numerical results based on the improved model are in better agreement than those based on Lankarani and Nikravesh impact force model; (2) the numerical results based on the improved model are in reasonable agreement with the experimental results, and the relative errors of impact force and restitution coefficient are all no more than 10% between numerical and experimental results; and (3) the improved contact force model is effective and can exactly describe the impact effects between two bodies in mechanical system.
Keywords
Introduction
It is well known that the clearance is inevitable between adjacent two parts in mechanical system due to errors caused by design, manufacture, and assembly, as well as demand of relative motion, 1 which leads to universal phenomenon of contact and impact in multibody systems. It also makes the value of impact force between two parts with relative motion to enlarge obviously, leading to vibration, shock, and nonlinear phenomenon in dynamic performance of mechanical system, and even cause failure of the whole mechanical system.2–5 Therefore, it can be concluded that the accurate modeling of impact is critical for dynamic research of mechanical system.
In order to study the effect of impact in clearance joint on dynamic appearance of mechanical systems, over the several past decades, a great number of researchers all over the world focus on the modeling and researching of impact effects on the dynamic characteristics of multibody system; several different contact force models have been presented to represent impact effects between two bodies, especially in clearance joint such as journal and bearing.6–15 Some of them are pure elastic contact force models, whereas others contain the dissipative term used to evaluate the energy loss in collision process, which is formulated as a function of the damping coefficient and impact velocity. The classical pure elastic contact force model was present by Hertz, 6 the model is a nonlinear power function of indentation during impact process and also includes the influence of other coefficients, such as geometric and material characteristics. Liu et al. 7 extended Hertz’s model and introduced another pure elastic contact force model, which has a wider application range than Hertz’s model, and was confirmed by the finite element method (FEM) analysis results to meet different clearance sizes and loads. In order to overcome the drawback of pure elastic contact force model, that is, it cannot evaluate the energy dissipation during collision process, several dissipative contact force models have been published. Based on the contact force model of Hertz, Hunt and Crossley 8 presented a dissipative contact force model with a nonlinear viscoelastic term related to restitution coefficient and initial impact velocity. Lee and Wang 9 introduced a new contact force model, which was satisfied with the boundary conditions of the hysteresis damping factor. Lankarani and Nikravesh 10 further improved the model of Hunt and Crossley and presented another contact force model (L-N model), which is most popular and frequently used. Gonthier et al., 11 Zhiying and Qishao, 12 Flores et al., 13 Hu and Guo, 14 and Wang et al. 15 also proposed different dissipative contact force models, which have a wide range of restitution coefficient. Based on their improved model, these researchers presented a large number of numerical and experimental results, which focus on the influence of impact phenomenon in clearance joints on the dynamic performance of multibody mechanical systems.15–25
But for all these impassive contact force models above, the restitution coefficient is assumed to be a constant value. In fact, the coefficient of restitution is related to the parameters of material, structure, initial impact velocity, and even the yield strength of materials. So the published impassive contact force models above are approximate. In order to overcome this shortage, this research is mainly devoted to present an improved contact force model with varied restitution coefficient, which is related to initial impact velocity and the yield strength of materials.
The article is organized as follows. First, traditional contact force models are introduced and compared in section “General issues in impact modeling,” and an improved contact force model is presented in section “An improved impact model,” which is different from the published contact force models. The restitution coefficient of the new model is varied, which is related to initial impact velocity and the yield strength of materials. Two typical pendulum experimental test rigs are used as examples to validate the improved contact force model, and a large numbers of simulations based on same situations with the new model and the most popular L-N model are also illustrated and compared with experimental results in section “Application: numerical and experimental.” Finally, we will draw the conclusions of this study in section “Conclusion.”
General issues in impact modeling
In this section, some typical general contact force models are presented and analyzed, which are used to describe the impact effects of two bodies as shown in Figures 1 and 2.
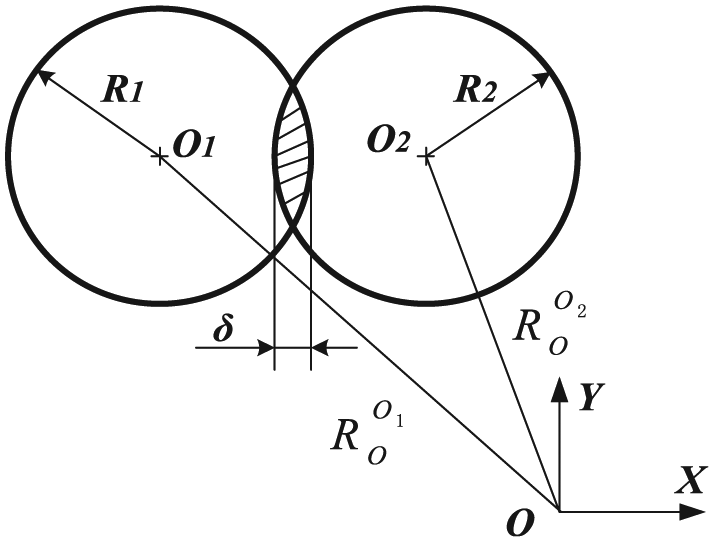
Contact between two spherical bodies.
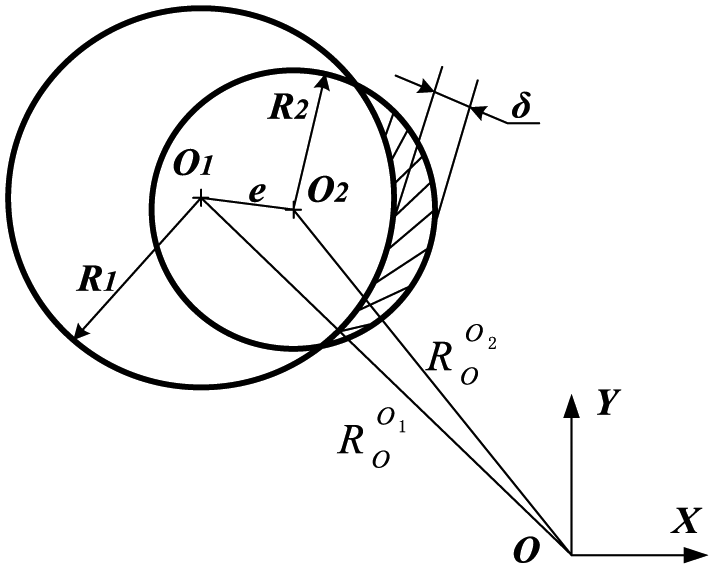
Revolute clearance journal with contact.
Hertz was pioneer in contact mechanics; he concluded that the contact area was elliptical, and the contact effects are related to the coefficients of materials and structures of impact two bodies, as well as deformations
Published contact force models.
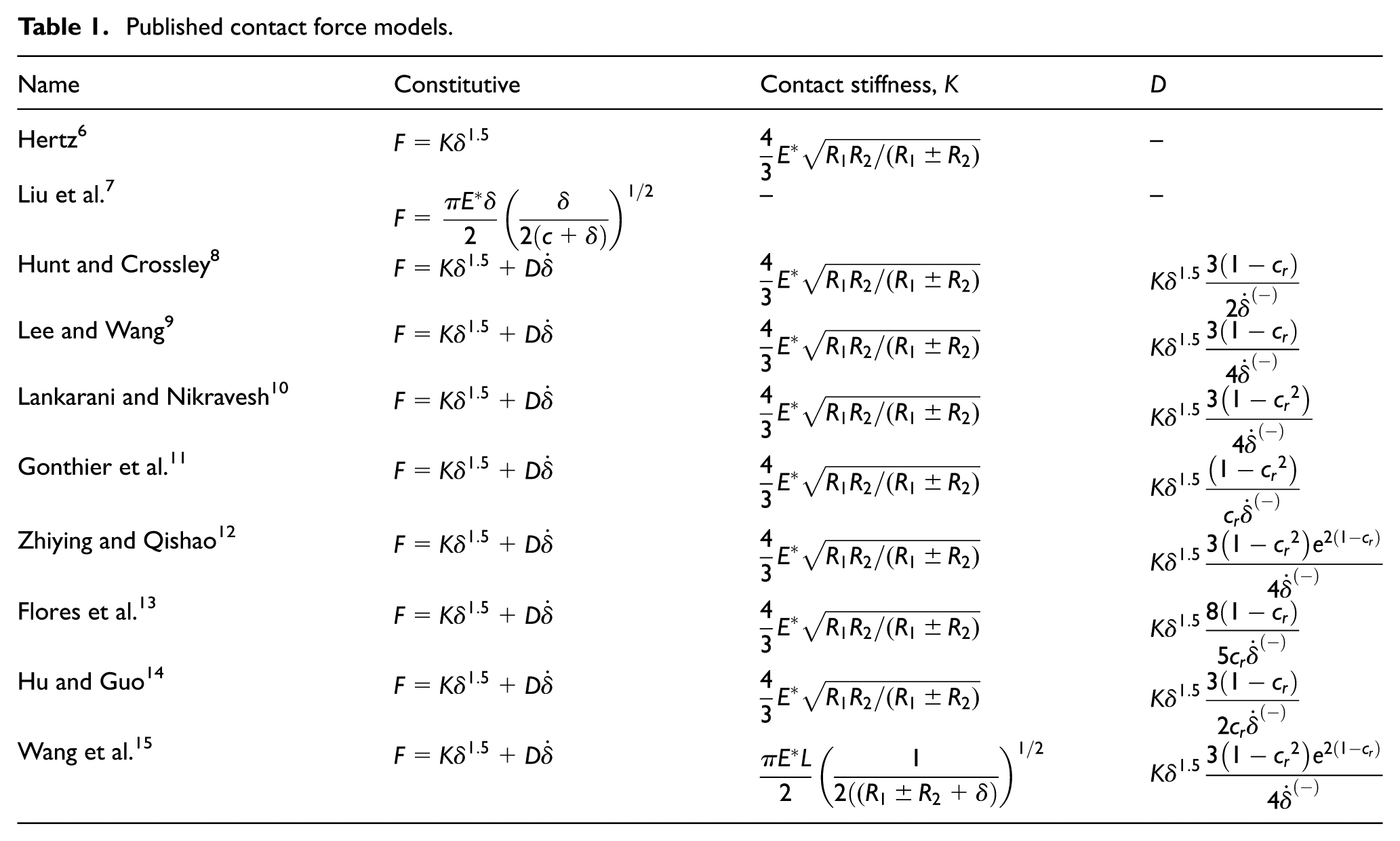
But the contact force model presented by Hertz is a pure plastic contact force model, which does not consider the energy dissipation during compression and restitution phases of impact. 26 In order to solve this drawback, several researchers extend Hertz’s work and present a series of nonlinear contact force models as show in Table 1. And the models presented by Hunt and Crossley, 8 Lee and Wang, 9 Lankarani and Nikravesh, 10 Gonthier et al., 11 Zhiying and Qishao, 12 Flores et al., 13 and Hu and Guo 14 have similar expressions, which have the same constant contact stiffness expressed as follows 26

where

where
The models6–12 presented above are more suitable for impact condition of larger clearance size with lower initial impact velocity.
7
Based on the models of Zhiying-Qishao
11
and Liu,
7
Wang et al.
15
also introduced an improved contact force model, which is not limited by the clearance size and initial impact velocity, as well as restitution coefficient

where L is the length of bearing,
In order to compare and analyze models above, a typical journal and bearing joint is presented as example; the bearing is fixed as shown in Figure 3. The radii of bearing and journal are 10 and 9.9 mm, respectively. The length of bearing is 15 mm. The mass of journal is 0.04 kg, and the initial velocity is 0.3 m/s. The bearing and journal have the same Young’s modulus of 207 GPa and Poisson’s ratio of 0.3. The coefficient of restitution is assumed to be 0.9.

A planar revolute joint of journal and bearing with clearance.
It is clear that the impact force model presented by Lee-Wang 9 is very similar to that of Hunt and Crossley, 8 as well as the impact force model of Hu and Guo 14 is close to that of Flores et al. 13 So Figure 4 only shows the numerical results of externally impact between journal and bearing with clearance, which is modeled by different contact force models presented by the Hertz, 6 Liu, 7 Hunt and Crossley, 8 Lankarani and Nikravesh, 10 Gonthier et al., 11 Zhiying and Qishao, 12 Flores et al., 13 as well as Wang et al. 15

Externally impact between journal and bearing molded by different force models: (a) force–indentation relation and (b) velocity–indentation relation.
It can be concluded from Figure 4(a) that the outcomes of energy dissipation based on models of Gonthier et al., Zhiying and Qishao, Flores et al., and Wang et al. are similar, which are obviously larger than those of Hunt and Crossley, as well as Lankarani and Nikravesh. And the value of energy dissipation is zero for Hertz’s model due to its pure elastic model. That means the models of Gonthier et al., Zhiying and Qishao, Flores et al., and Wang et al. are more accurate than the models introduced by Hunt and Crossley, Lankarani and Nikravesh, and Hertz. These are also illustrated in Figure 4(b); the depart velocities obtained with models of Gonthier et al., Zhiying and Qishao, Flores et al., and Wang et al. are nearly to −0.15 m/s, the values based on Hunt-Crossley and Lankarani-Nikravesh are closed to −0.2 m/s, and the corresponding value of Hertz is −0.3 m/s. It is clear that the depart velocities founded on Gonthier et al., Zhiying and Qishao, Flores et al., and Wang et al. are in more agreement with the assumed restitution coefficient of 0.5. It needs to be highlighted that, for all contact force models presented above, the coefficient of restitution is approximately assumed to be a constant value.
An improved impact model
As illustrated in section “General issues in impact modeling,” the coefficient of restitution is defined as constant parameter, which is an approximate method. In fact, restitution coefficient is related to the parameters of material, structure, initial impact velocity, and even the materials’ yield strength.
Stammers and Ghazavi 27 presented a restitution coefficient based on initial velocity of impact, which can be calculated as follows

where v is the initial impact velocity.
From the experimental results, Zhang and Sharf 28 find that the yield strength of material also has obvious influence on the impact effects and need to be considered to calculate of impact.
In order to consider the influence of initial impact velocity and the materials’ yield strength on the restitution coefficient, as well as the impact force, the article extends the works of Wang and Liu, 15 Stammers and Ghazavi, 27 as well as Zhang and Sharf, 28 ignoring the plastic deformation during impact process, which is evaluated by the restitution coefficient approximately, and then introducing an improved impact force model, which is evaluated as follows
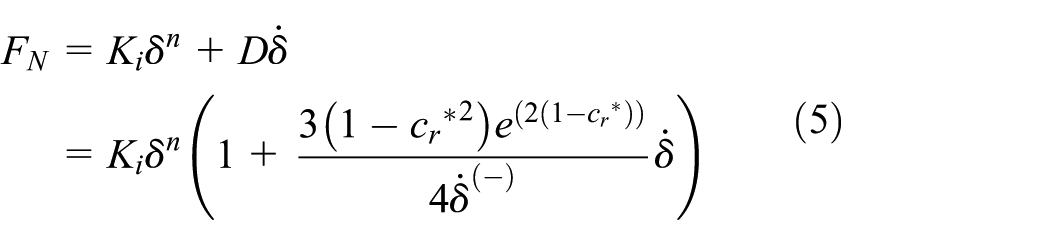
where

where

where
In order to verify this improved model, the single impact and restitution process is simulated based on L-N contact force model and the improved model. The impact scenario is the same as described in section “General issues in impact modeling,” but the initial velocity of journal is 0.1, 0.3, and 0.5 m/s, respectively, and the coefficient of restitution in L-N contact force model is assumed to be 0.7, 0.8, and 0.9.
The simulation results are shown in Figures 5–9 and Tables 2–4. (1) It can be concluded that with the increase in the initial impact velocity from 0.1 to 0.3 and 0.5 m/s, the impact force and indentation are all increased. For the L-N model, when the coefficient of restitution is assumed to increase from 0.7, 0.8 to 0.9, the energy dissipated during impact process is gradually decreased, as well as the results based on the improved model. It is clear that for the same initial impact velocity, the indentation based on improved model is always smaller than that of L-N model, but the maximum value of impact force based on improved model remains larger than that of L-N model. As illustrated in Table 2, the corresponding maximum values of impact forces are 283.6, 059.8, and 1955.5 N for velocity 0.1 m/s; 287.7, 1075.1, and 1984.3 for velocity 0.3 m/s; as well as 295.5, 1104.4, and 2038.2 N for velocity 0.5m/s. The similar phenomenon can also be found from values of indentation and separation velocity as depicted in Tables 3 and 4, respectively, whereas the parameters of impact force, indentation, and separation velocity are only related to the initial impact velocity for the improved model. (2) With the increase in restitution coefficient, the relative error between L-N model and the improved model is gradually decreased, as illustrated in Figure 6; the higher the restitution coefficient, the closer the depart velocity and the initial impact velocity, as well as the depart velocities are based on improved impact force model and L-N model. It can be concluded clearly from Table 4 and Figure 9 that the separation velocities based on two models are almost coincident with the coefficient of restitution, which is 0.9. Especially, when the initial impact velocity is 0.3 m/s with restitution coefficient 0.9, the separation velocities based on two models are −0.275 and −0.274 m/s, respectively, which is due to the L-N model that is more effective for the contact situation with larger clearance size but lower load. (3) It can be concluded from Figure 7 that the higher the restitution coefficient with smaller initial impact velocity, the closer the maximum value of impact force based on the improved impact force model and L-N model. From Figure 8, it is clear that the smaller the coefficient of restitution and the initial impact velocity, the closer the maximum value of indentation maximum value based on two models. As calculated in Figure 9, the separation velocities based on two models are closer when the restitution coefficient is higher with smaller initial impact velocity. All these results due to the L-N model are more suitable to the condition of smaller impact velocity with higher coefficient of restitution, and the simulation results clearly validate that the improved model is more accurate and effective than L-N model, which can directly and exactly describe the restitution during contact process using initial impact velocity and the material parameters.
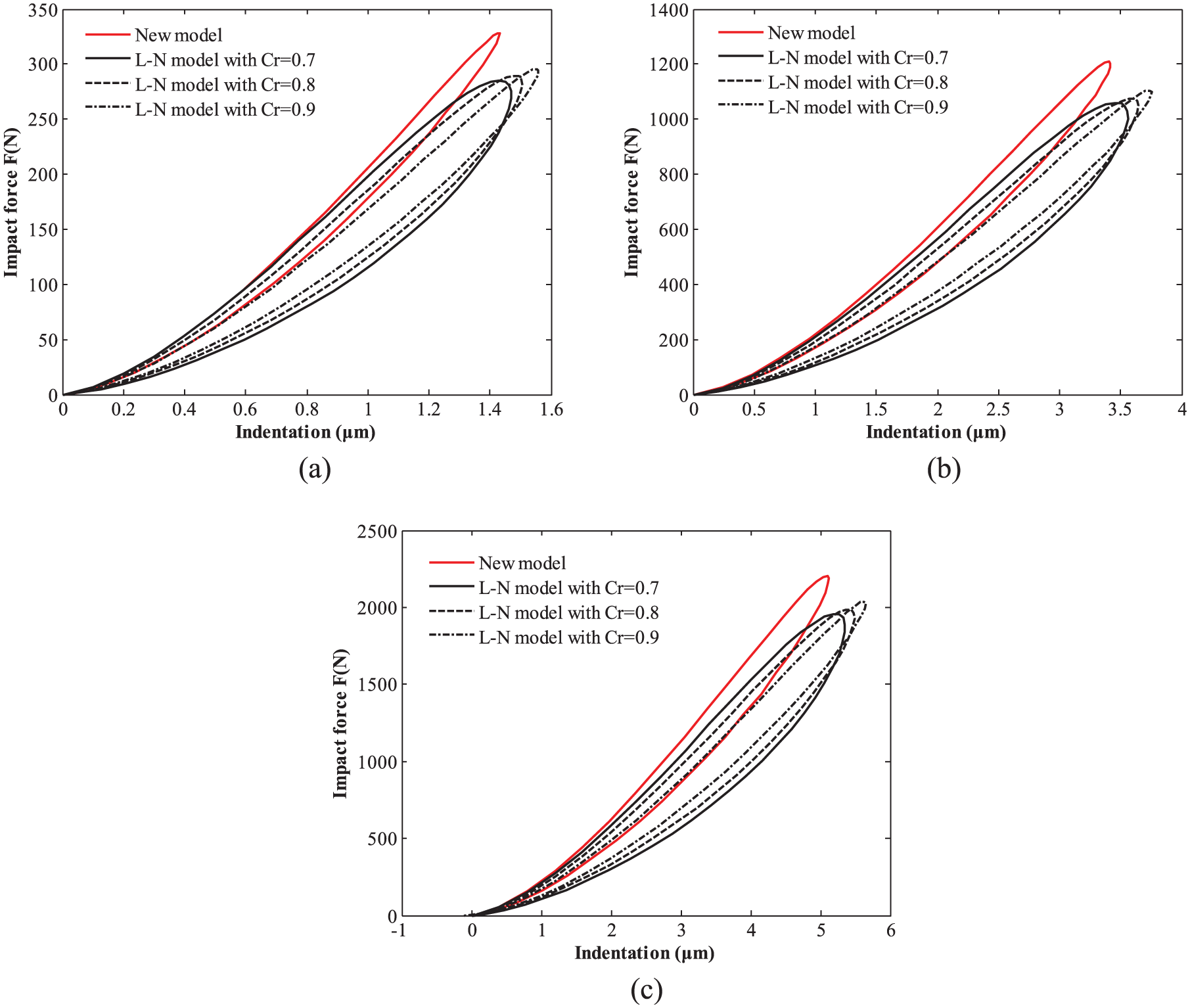
Force–indentation relation based on new model and L-N model with different coefficients of restitution: (a) initial impact velocity is 0.1 m/s, (b) initial impact velocity is 0.3 m/s, and (c) initial impact velocity is 0.5 m/s.

Velocity–indentation relation based on new model and L-N model with different coefficients of restitution: (a) initial impact velocity is 0.1 m/s, (b) initial impact velocity is 0.3 m/s, and (c) initial impact velocity is 0.5 m/s.

Maximum value of impact force varying with initial velocity and restitution coefficient.
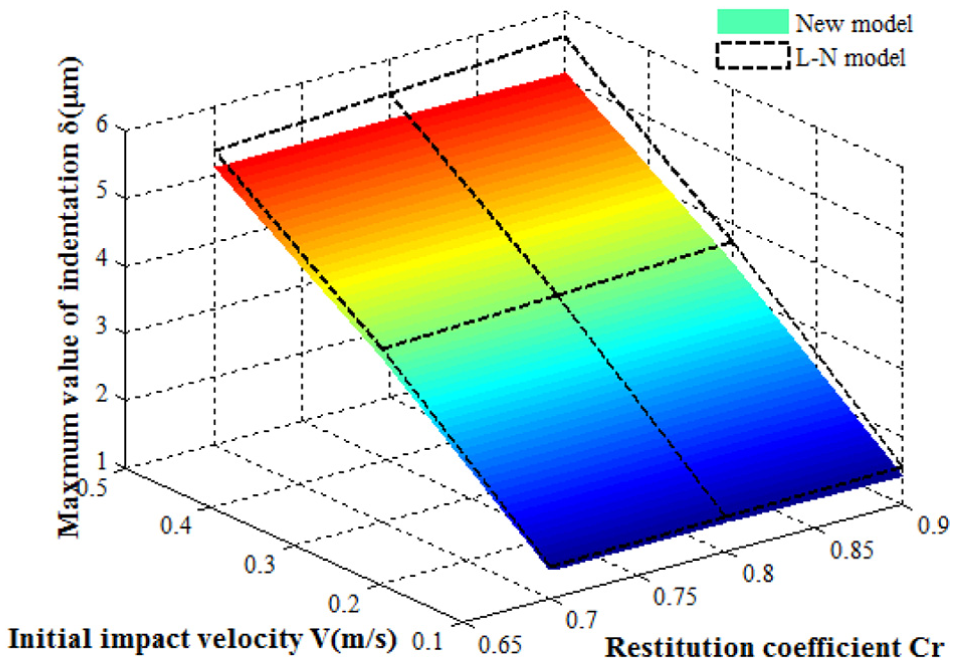
Maximum value of indentation varying with initial velocity and restitution coefficient.

Separation velocity varying with initial velocity and restitution coefficient.
Maximum values of impact force based on new model and L-N model.

Maximum values of indentation based on new model and L-N model.

Separation velocity based on new model and L-N model.

Application: numerical and experimental
In this part, two typical impact experiments and corresponding simulations are presented to further validate the improved contact force model.
Application 1: direct central impact between two identical spheres
As illustrated in Figure 10, direct central impact between two identical spheres is conducted by a pendulum-type set-up.
29
The material parameters of two spheres are shown in Table 5. At the beginning of the experiment, one sphere is in rest vertical state and the other is released from a pendulum angle of

Pendulum impact setup.
Material properties of spheres (SUJ2).

Figure 11 and Table 6 show the experimental and numerical results based on improved model and L-N model with different initial impact velocities. 29 In order to further compare and analyze the results of experiments and simulations, and compare the effective of two impact force models, the actual restitution coefficient related to Newton’s impact hypothesis is used as assessment standard, which can be evaluated as follows

where

Coefficient of restitution based on experimental and numerical results.
Restitution coefficient and corresponding percentage error based on experimental and numerical results.
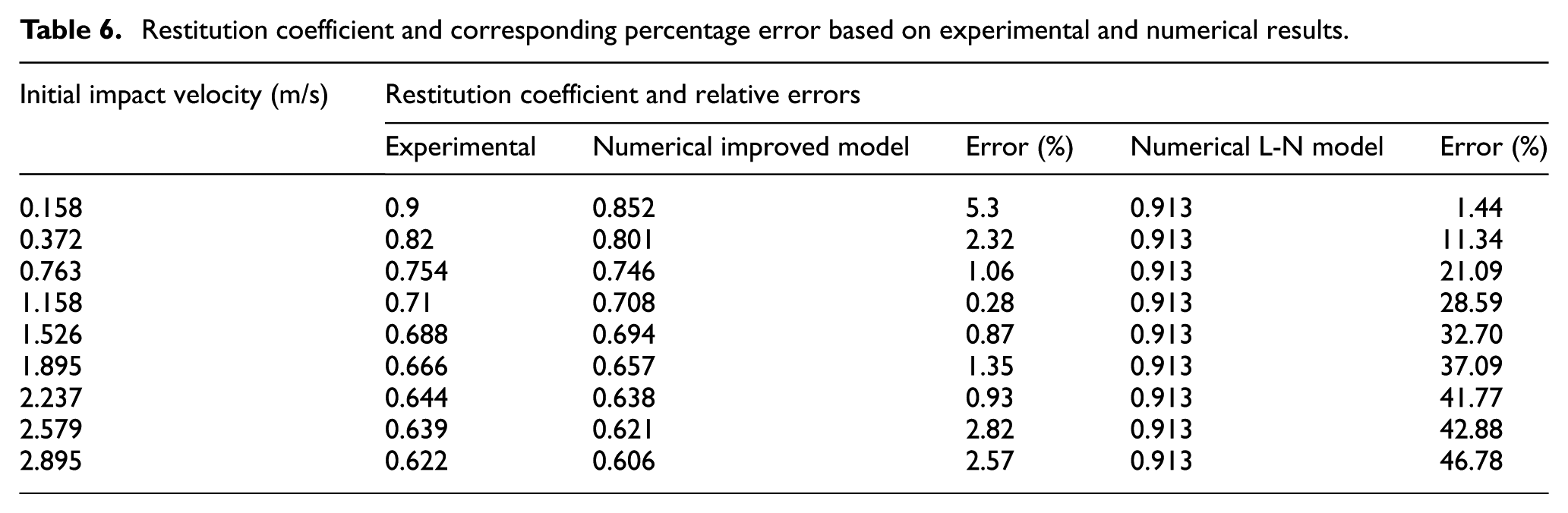
It can be concluded from Figure 11 and Table 6 that (1) with the increase in initial impact velocity from 0.158 to 2.859 m/s, the coefficient of restitution has an obvious decrease, which changes from 0.9 to 0.622 for experimental results and varied from 0.852 to 0.606 for numerical results based on improved impact force model, whereas the results for L-N model are constant as 0.796. (2) The relative errors between experimental and numerical results are also changed with the increase in initial impact velocity, and the relative errors between improved model and experimental are all no more than 6%, whereas the relative errors between L-N model and experimental are all higher than 10% except initial impact speed which is 0.158 m/s, and the maximum value of relative error between L-N model and experimental is 46.78%, which means the numerical results based on improved model has higher consistency with experimental results and the improved contact force model is more effective than L-N model. (3) The restitution coefficient of impact process is directly related to initial velocity, which should be considered seriously.
Application 2: direct central impact between a spheres and a cylindrical specimen
Figure 12 shows another typical impact pendulum test rig, 28 which contains a steel ball, a cylindrical specimen, and an accelerometer, as well as a digital video camera with a frame rate of 1000 frames/s. It also needs to be noted that the test rigs and the process of experimental and quantified experimental errors are all described clearly in Zhang. 30

Experimental rig: impact between a steel ball and a cylindrical specimen (modified from Zhang and Sharf 28 ).
Different from application 1, the steel ball is released from a pendulum angle, but the cylindrical specimen is fixed with platform as depicted in Figure 12. The initial and depart velocities are measured by the digital video camera and then the coefficient restitution is also formulated by equation (8). Meanwhile, by measuring the acceleration of the steel ball during impact process, the impact force between the surface of steel ball and cylindrical specimen can also be formulated from Newton’s second law as F = ma, where m and a are the mass and acceleration of steel ball, respectively.
Furthermore, in order to study the effects of yield strength of material on the restitution coefficient and impact force, two different materials of cylindrical specimen (C1 and C2) are selected as shown in Table 7.
Material properties of impacting bodies.

As described in Table 8 and Figure 13, (1) with the change of initial impact velocity from 0.0938 to 0.5 m/s, the separation velocities of specimen C1 and specimen C2 are all decreased, which are coincident with the results of application 1. (2) Although the initial impact velocity is identical, the value of the separation velocities based on C1 is larger than those of C2 all the time, and separation velocities of C1 are 0.0885, 0.1400, 0.1907, 0.2738, 0.3548, and 0.4496 m/s, whereas the results of C2 are 0.0799, 0.1239, 0.1660, 0.2330, 0.2965, and 0.3648 m/s, which is due to the material’s yield strength of C1 that is higher than that of C2.
Results of velocity after impacting specimen C1 and C2.


Coefficient of restitution: (a) specimen C1 and (b) specimen C2.
Tables 9 and 10 illustrate the experimental and numerical results for C1 and C2; it can be identified that the relative errors between numerical and experimental for C1 and C2 are also changed, when initial impact velocities changed from 0.0938 to 0.5 m/s, but the values are all less than 10%, and the maximum value of relative error for C1 and C2 are 5.81% and 7.11%, respectively, which further validate the effectiveness of the improved model presented above. Meanwhile, it can also be concluded that the yield strength of material has obvious influence on the restitution coefficient of impact; the higher the value of yield strength, the larger the coefficient of restitution.
Results of restitution and corresponding percentage error based on experimental and numerical for specimen C1.

Results of restitution and corresponding percentage error based on experimental and numerical for specimen C2.

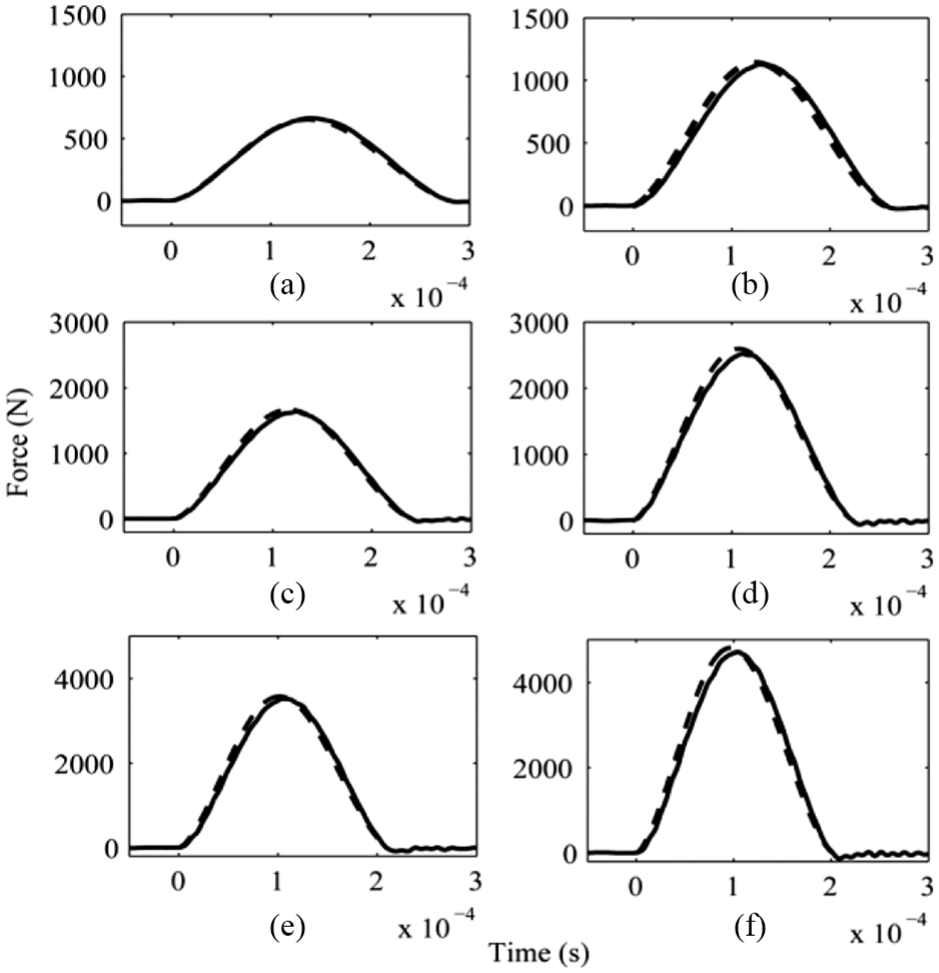
Figures 14–16 show the experimental and numerical results of impact force during impact process, where the solid line is the results based on C1 and the dotted line represents the results of C2; it needs to be noted that Figure 14 depicts the results in Zhang and Sharf, 28 and Figure 15 is the corresponding results of this research.
Experimental results of impact forces with different initial velocities: (a) v = 0.0938 m/s, (b) v = 0.15 m/s, (c) v = 0.206 m/s, (d) v = 0.2989 m/s, (e) v = 0.391 m/s, and (f) v = 0.5m/s.

Numerical results of impact forces with different initial velocities: (a) v = 0.0938 m/s, (b) v = 0.15 m/s, (c) v = 0.206 m/s, (d) v = 0.2989 m/s, (e) v = 0.391 m/s, and (f) v = 0.5m/s.

Maximum of impact force: (a) specimen C1 and (b) specimen C2.
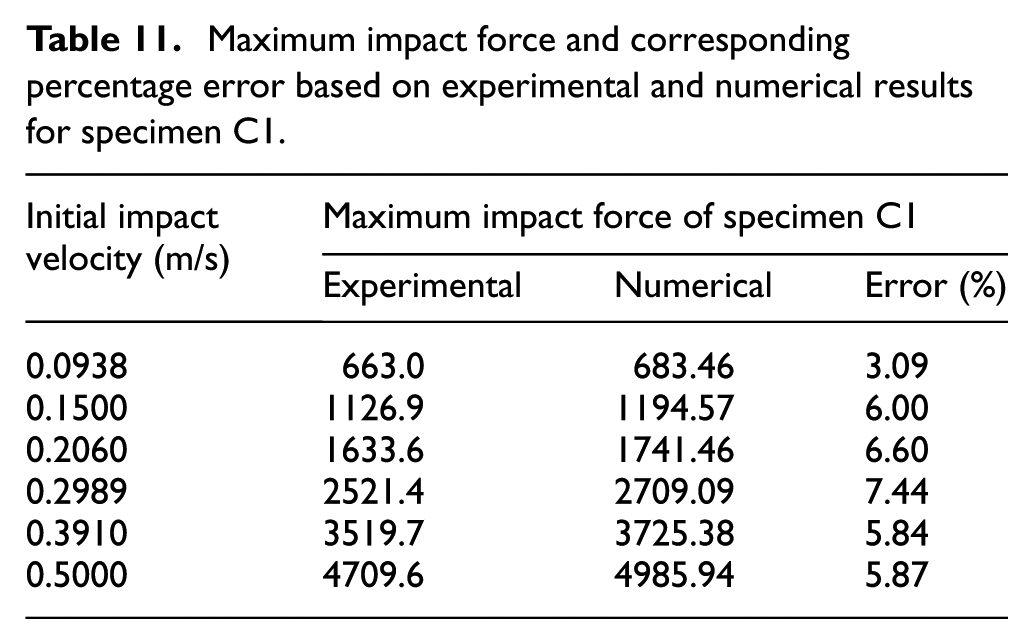
When compared to the results depicted in Figures 14 and 15, it is clear that (1) the impact forces of numerical and experimental have similar change regulation, the higher the initial impact velocity, the larger the impact force, but lower the impact time consumed. 28 (2) As illustrated in Figure 16, Tables 11 and 12, the numerical results of maximum values for impact forces based on C1 are larger than those of C2 due to the yield strength of C1 that is larger than that of C2, which are coincident with experimental results. (3) The numerical results of maximum impact force with different initial velocities are in reasonable agreement with those experimental results. And the maximum values of relative errors between numerical and experimental results for C1 and C2 are 7.44% and 8.33%, respectively, which are all no more than 10% as illustrated clearly in Tables 11 and 12.
Maximum impact force and corresponding percentage error based on experimental and numerical results for specimen C1.
Maximum values of impact force and corresponding percentage error based on experimental and numerical for specimen C2.

Conclusion
Based on the comprehensive study of published contact force models, the work presented an improved contact force model. The new model is obviously different from the existing models, that is, the coefficient of restitution is related to initial impact velocity and the yield strength of material, which is different from traditional impact force models, where the restitution coefficient is assumed to be a constant value nearly 1 in former models. The new model is verified more effectively and accurately than the popular used L-N model, which presented a new method to describe the effect between the journal and the bearing in clearance joint.
Two typical pendulum experimental test rigs are applied to validate the improved contact force model: one is direct central impact between two identical spheres with same materials and the other is direct impact between a steel ball and a cylindrical specimen with different materials. For each application, numerical results, which are based on the improved model and most popular impact force model presented by Lankarani and Nikravesh, are presented and compared with corresponding experimental results. In the first experiment, results illustrated that the maximum value of relative error between new model and experimental is only 5.3%; however, this value reaches 46.78% for L-N model, which means the improved contact model has higher accuracy and effectiveness than L-N model, and can effectively describe the impact process. In the second experiment, the numerical results are in reasonable agreement with the experimental results, and the relative errors for impact force and restitution coefficient are all no more than 10% in two applications, no matter what kind of initial impact velocity and material of impact body, which further verified the improved impact model.
It is important to note that the results presented in the work do not consider the plastic deformation during impact process, which may has influence on the impact effect. So in our future researches, it will be considered seriously.
Footnotes
Acknowledgements
The authors would like to express their appreciation to the agencies.
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by the Education Foundation of Shaanxi (Grant Nos 17JK0551 and 14JK1495), Doctor Starting Foundation from Xi’an University of Technology (Grant No. 106-451117002) and Foundation from Xi’an University of Technology (Grant No. 2017RY001).