
Abstract
In order to evaluate the serviceable condition of rigid hoist guides and recognize their status patterns, vibration and angle signals were collected from an test-rig which can simulate different sorts of defects. Characteristic parameters by which status patterns can be judged were selected and designed. Multi-classifier based on support vector machine was applied during recognition. The collected samples were divided into two parts which were used as training data and testing data, respectively. The numerical result verified the validity of support vector machine multi-classifier on pattern recognition of rigid hoist guides.
Keywords
Introduction
Rigid guides are widely used in hoisting systems in coal mines. 1 They guarantee the smoothness and safety during hoisting; however, with the growth of service years, possible defective guides might increase running resistance and even cause accidents such as conveyance jamming or drop.2–4 It has been an interest for scholars and engineers to find out an effective way to recognize their status patterns.
People used to measure distance between guides and inclined angle to determine whether there is abnormity that has happened to the guides. 5 Now this method is not popularly used because of its poor accuracy and long operating time. South African scholars are the earliest group to adopt vibration accelerate to evaluate the performance of rigid guides and point out the existence of defections, 6 but they have not been able to distinguish different types of defections very well. For example, both local embossment and joint dislocation cause impact which is very similar and hard to tell from each other.
It is the time to carry out further study on pattern recognition then. ZF Li 7 used to research on intelligent identification of local embossments based on singularity of wavelet-transformed vibration signals. YQ Jiang 8 adopted the technology of Rough Set and Neural Network to evaluate the severity of the impactive faults of rigid guides. Such research has made marked progress on the recognition of a certain fault; however, for the sake of higher safety, completely study on recognition of every possible failure of rigid guides is necessary. In fact, in the area of recognition of mechanical faults, by so far, there have been many sorts of methods that are being researched and applied in different areas,9,10 such as Neural Network, Clustering Analysis, Fuzzy Theory, and Support Vector Machine (SVM).
Neural Network is a nonlinear system that imitates the features of the neuronal net in a brain. It not only has lots of advantages such as high robustness, self-organization, self-learning, and nonlinear mapping, but also has some deficiencies such as slow convergence, under-learning, overlearning, and the need of large quantity of samples. Clustering analysis uses statistical methods to investigate relationship between different parameters based on which these parameters are categorized. On the foundation of Fuzzy Mathematics, Fuzzy Theory judges faults with their membership degree that are calculated through membership functions of characteristic vectors and fuzzy relationship. Clustering Analysis and Fuzzy Theory are usually combined to handle some problems of uncertainty reasoning and work well, but relevant knowledge or experience is needed before handling.
For rigid guides of a hoisting system, it is difficult to obtain large quantity of samples without affecting normal production, and there has been no relevant knowledge and experience yet by so far as well, so these methods would not be very effective here. Fortunately, SVM can be just used as the self-learning method that works well with small amount of samples.
Ground on conclusions of present related research outcomes and comparison of different recognition methods, this article is involved in the following work: (1) summary of status patterns of rigid guides; (2) setting up an test-rig that can simulate different failures and collect samples; (3) selection of characteristic parameters; (4) pattern recognition with SVM multi-classifier; and (5) illustration of the validity of SVM.
Statuses of guides
Rigid guides are the rails for a hoisting conveyance to run along through a vertical shaft. During their service, different sorts of deficiencies might take place because of swing of conveyances, dropping objects, or topographic change. These deficiencies affect the stability and safety of a hoist. Typically, as shown in Figure 1, there are four statuses for guides.

Four patterns of guides: (a) normal, (b) local embossment, (c) joint dislocation, and (d) inclination.
Among the four statuses or patterns, Figure 1(a) shows the normal condition that means there is not any deficiency about the guides; Figure 1(b) shows there is a local embossment somewhere on a guide; Figure 1(c) shows that there is a dislocation at the joint between two guides; Figure 1(d) shows that an inclination has happened to guides. Pattern (a) is certainly expected while each of the rest pattern makes a threat to the hoisting safety. For instance, both patterns (b) and (c) can cause a dangerous conveyance jamming. Pattern (d) increases wear between guides and cage shoes. It is significant to make sure the guides are in pattern A or one of the rest is diagnosed early before any accident occurs. In another words, pattern recognition is significant for both the avoidance of accidences and the decision of what measures to take for the needed reparations.
Experimental set-up
In order to carry out the following research on recognition of the above four patterns, a test-rig is needed. It should be able to imitate different patterns and collect signals which contain the information of pattern. The finished test-rig is shown as Figure 2 that includes its image and schematic.

Test-rig: (a) image and (b) schematic.
The test-rig is mainly made up of speed regulator, motor, gear box, winding drum, hoisting conveyance, rigid guides, head sheave, sensors, and signal collecting device. The speed regulator is used to start the motor and adjust its speed. The motor drives the winding drum through the gear box. Pulled by the winding drum and rolling via the head sheave, the steel rope carries the hoisting conveyance up and down along the guides. Vibration and inclination sensors are adopted to provide information for latter pattern recognition. They are collected by the signal acquisition device which is actually a combination of a computer and data-acquisition card based on PCI bus. Key components of this test-rig and their critical technical specification are shown in Table 1.
Key components and their specification.

Selection of characteristic parameters
Characteristic parameter of inclination
No matter what method to use during pattern recognition, selection of effective characteristic parameters is the most significant step. It is natural to employ the inclination angle as the characteristic parameter to tell the pattern of inclination from the rest ones. It can be collected through an angle sensor as listed in Table 1. As shown in Figure 3, in comparison with normal pattern, inclination pattern has obviously larger angle of inclination at the relatively stable phase; the same is true for other two patterns. The angles shown are around 6° and 2°, respectively, for inclination and normal pattern.

Angle signals of inclination and normal patterns.
Waves appear at the latter half phase of both curves, which are caused by pulse excitations such as a local embossment and a joint dislocation here, but how to distinguish them needs different effective characteristic parameters.
Characteristic parameters to distinguish local embossment and joint dislocation
Both local embossment and joint dislocation stimulate pulse signals to vibration sensors. In order to study this kind of mutational signals, singular analysis is usually employed. 11 The following is the discussion about it.
If a function is infinitely differentiable at a point, then this point is smooth; otherwise, it is singular. Lipschitz index is often used to measure this sort of singularity. The following is its definition.
If a signal

where
In fact, Lipschitz index has close tie with Taylor series. If
If t is indicated as

Similarity between equations (1) and (3) shows the essential connection between Lipschitz index and Taylor series.
Now, make wavelet transform for

where a is the scale factor. If the wavelet base function

Through comparison among equations (1), (3), and (5), it is found that wavelet transform of

Figure 4 shows the WTMMs and their envelopes of the vibration signals collected while joint dislocation, local embossment, and normal conditions. As shown in Figure 4, normal condition has the smallest peak WTMM, about 0.02, while that of joint dislocation and local embossment are a bit larger and respectively around 0.16 and 0.11. It is easy to tell the normal condition from the rest two patterns, but not so reliably to distinguish them merely by WTMM, so another characteristic parameter is needed.

WTMMs and envelopes of vibration signals collected while (a) joint dislocation, (b) local embossment, and (c) normal.
Through further observation, it can be found that the curve of WTMM for local embossment fluctuates more intensively than joint dislocation. In order to capture and reflect this difference, a characteristic parameter of the area between WTMM and envelope was designed. 13 It can be calculated by

where s is the area;
Now, three characteristic parameters have already been chosen or designed for the next step of pattern recognition.
Pattern recognition based on SVM
Linear classification based on SVM
Pattern recognition can also be regarded as a classification problem on which is SVM focusing.14,15 The basic thought of SVM is trying to find an optimal hyperplane the blank area on both sides of which is the widest. With this hyperplane, an optimal classification can be achieved.
As for a linear classification problem, assume this hyperplane is

where x is the group of samples; w and b are respectively the normal vector and constant vector.
To make sure the region on both sides of this hyperplane has the biggest area, introduce Lagrange function

where a is the Lagrange coefficient. The optimal solution of w, b, and a makes equation (9) has the minimum value and means the optimal hyperplane has been obtained, that is

where
Peculiarity of SVM classifier for pattern recognition of rigid guides
For the particular question in this article, namely, pattern recognition of rigid guides, SVM classifier here has two characteristics: nonlinearity and multi-classification. In order to solve the nonlinearity, characteristic vectors can be mapped into a higher dimensional space within which the hyperplane can be constructed. SVM based on kernel function is used to handle its probable high dimension.
Patterns of guides discussed in the paper include normal, joint dislocation, local embossment, and inclination, so recognition of them is actually a multi-classification of samples. Hence, a one-to-many algorithm is employed to achieve that, namely, several binary classifiers are combined together into a multi-classifier.
Selection of parameters of SVM
During the solving process, parameters such as kernel function, its parameter g, and penalty parameter

To find the optimal combination of g and

Searching process of parameters of kernel function and penalty.
This grid search technique also works well for other parameters. The final parameters obtained are shown in Table 2. With them and those collected samples, pattern recognition can be carried out then.
Parameters of the SVM classifier.
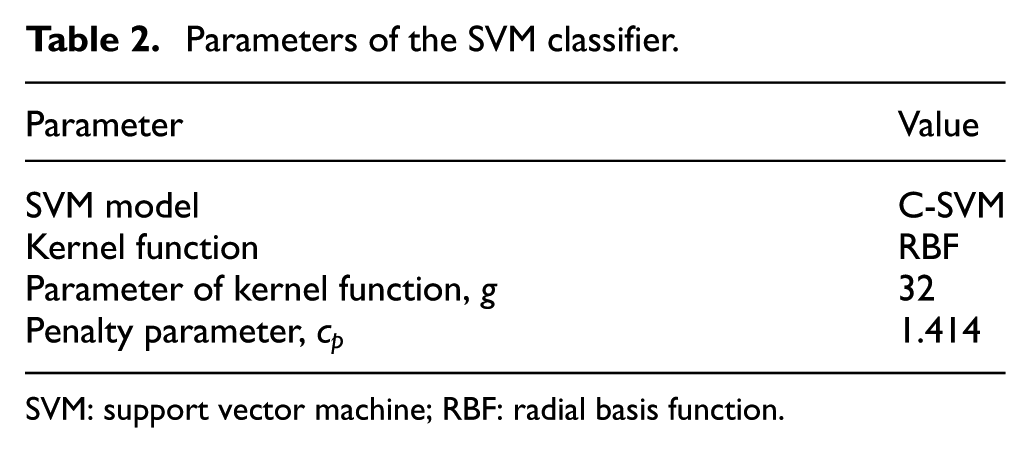
SVM: support vector machine; RBF: radial basis function.
Numerical results and discussion
With the test-rig shown as Figure 2, different patterns of the rigid guides were simulated. Vibration and inclination angle signals were acquired through sensors installed on the conveyance. According to the requirements about characteristic parameters, samples collected were organized in the form of Table 3 after a series of processing to the collected signals. Table 3 lists 6 of the total 100 samples collected, which contain 25 samples for each pattern.
A part of the sample set.

WTMM: wavelet transform modulus maxima.
Samples were divided randomly into two parts, training subset at 70% and testing subset at 30%. Training subset was for training to get the supporting vectors, optimize parameter g and
Confusion matrix of recognition.

Conclusion
Statuses of rigid guides were categorized into four patterns which are normal, joint dislocation, local embossment, and inclination. To research on their recognition, a test-rig was constructed. It can not only simulate the four patterns but also acquire vibration and inclination signals for training samples.
In order to distinguish different patterns, characteristic parameters were selected. Especially for joint dislocation and embossment, it was found out that WTMM and the area between WTMM and Envelop work well to tell them from each other.
In comparison with common SVM classification problems, nonlinearity and multi-classification are the two characteristics for patterns recognition of rigid guides. Network optimization method was used to search the optimal operating parameters. RBF was chosen as the kernel function, and the optimized values for the parameter of kernel function and penalty are 32 and 1.414.
The two parts divided from the collected samples are used for training and testing. The recognition rates for the four patterns are 100%, 86.87%, 93.33%, and 100%, which illustrates the validity of SVM multi-classifier for the pattern recognition of rigid guides.
Footnotes
Handling Editor: Chuan Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by a project funded by National Key Research and Development Program (grant number: 2016YFC0600905), the Natural Science Foundation of Jiangsu Province (grant number: BK20170441), National Natural Science Foundation of China (grant number: 51675520), and National Natural Science Foundation of China (grant number: 51805273).