
Abstract
The calculation of the critical force of the stepped column model of telescopic boom crane is the key to stability calculation of all-terrain crane. In slightly bending theory, differential equation can be built up, and then the deflection curve of ideal column can be obtained. Using this curve and the Rayleigh–Ritz method, the Euler force of the ideal column can be obtained. For n-stepped columns, Euler forces and the effective length coefficients can be acquired using the deflection curve of the ideal column and parabolic curve, respectively, combined with the Rayleigh–Ritz method. Differential equations of the n-stepped telescopic boom are established based on the vertical and horizontal buckling theory. The recursive formula of the stability of the n-stepped telescopic boom is deduced by the mathematical induction method. For the transcendental equation in the recursive formula, combined with the structural force characteristics and supplementary formulas, the Levenberg–Marquardt numerical optimization algorithm is used to solve the equations with n unknowns. Length coefficients obtained by the three methods are compared using GB3811-2008 and ANSYS 17.0. The results show that the accuracy of the numerical algorithm is the highest, and the first two algorithms will produce large errors when the stepped columns have more steps.
Introduction
With the increasing height of buildings and the rapid development of wind power, petrochemical, nuclear power engineering, mining metallurgy, and other industries, there is a pressing demand for large engineering crane. 1 With the heavy use of high-strength steel and automatic telescoping boom with a single pinning system, which make all-terrain crane obtain significant progress. 2 The most representative are LIEBHERR LTM 11200, XCMG QAY1200, SANY SAC12000, ZOOMLION QAY2000, and so on, all of which have more than eight sections in their telescopic boom. 3 As the lifting height and lifting capacity increase, the cross-section of the telescopic section increases accordingly. It becomes more and more important to use the material and reduce the weight reasonably, which allows for the manufacture processes. The stepped column model is the most frequently used one of these telescopic booms. However, the stability of the telescopic boom is key to determine the quality and safety of the crane. Therefore, the stability of the stepped column has become the focus of the study. Timoshenko and Gere 4 have studied the stepped column more thoroughly and use the energy method to calculate the critical force of a two-section stepped column. Some other approximate calculation methods are also given. Some scholars in China used the preset approximate deflection curves to study the stepped column using the energy method and the Ritz and Galerkin methods. 5 However, these methods equivalently introduce additional constraints, which will produce relatively large errors when the section number is more than three. 6 Q Liu 7 has used the transfer matrix to study the stepped column, but this method can only be used for the stepped column with a small section number. The error will increase when the section number of the stepped column increases. 8 With the development and perfection of the finite element method theory, Lu and colleagues9,10 have used a precise finite element method to study the critical force of the stepped column, which is adopted by the National Standard GB3811-2008. China’s current National Standard GB3811-2008 11 uses precise finite element method as the standard in stepped column stability analysis. But for multi-section stepped columns the stiffness matrix is quite large and the characteristic equation is comparatively complex. The stability of the most common multi-section stepped column is obtained by trial and error; the calculation is huge, which brings difficulties to practical applications. 5 In the current design specification, a table is used to represent the length factor in the case of a very special combination of the moment of inertia ratio and length ratio; at the same time, the section number ranges between 2 and 5. When the section number is more than five, it can be helpless. Furthermore, it recommends using the linear fitting method for the nonspecific combination mentioned in the specification. But the linear fitting errors are not shown. The specification cannot satisfy the actual engineering request. 12 Therefore, a method which can easily, accurately, and quickly solve the stability of the multi-section is needed when the section number is more than five.
Energy method
Deflection curve of the ideal column
For an ideal column, the compression is shown in Figure 1 which is assumed initially to be perfectly straight and compressed by a centrally applied load. The column is assumed to be perfectly elastic, and the stresses do not exceed the proportional limit. The critical load (or Euler load) is then defined as the axial force which is sufficient to keep the column in such a slightly bent form. The critical load can be calculated using the differential equation of the deflection curves. 13

Deflection of the ideal column.
When the coordinate axes are taken as indicated in Figure 1, and also the column is assumed to be in a slight deflection position, the bending moment at any cross section mn is

and the differential equation can be written as

Using the notation

we can write equation (2) in the form of

The general solution for this equation is

where A and B are constants of integration. These constants are determined from the conditions at the build-in end of the column. Taking the minimum value of kl which satisfies the equation, that is, the corresponding P will be the smallest bending force to maintain the slight deflection, the deflection curve equation is

Rayleigh–Ritz method to solve the Euler load of ideal column
According to the above differential equation, the smallest bending force, that is, the Euler load, can be obtained. But for complicated section cloumns, the differential equation will be helpless. According to the principle of stationary potential energy for solving the stability of cloumn buckling, critical load can be determined using the energy method regardless of whether defelection is large or small. 14 If the deflection curve is used as shown in equation (6), the strain energy of bending of the buckled column is

The work of the critical load can be approximated by the differential as shown in Figure 1

The potential energy of the whole structure is

According to the stationary potential energy, that is,

Solving the effective length coefficient of the stepped column using the deflection curve of the ideal column
Columns with constant cross-sections are not the most economical form of load-bearing structures. In the telescopic boom of crane, cross-sections are often abruptly changed. Telescopic boom is made of steel plate manufactured by mould pressing and welding. So the stepped column is the most reasonable structure up to now. It is necessary to list the differential equation of every section using which the whole stability of the stepped column can be derived. As shown in Figure 2, the whole length of the stepped column with n sections is

Mechanical model and force diagram of the multi-stepped column.
All the bending and moment are burdened by the telescopic boom. The length relations are

Assume that the deflection curve is still the same as that of the ideal column (for simplicity

Note that
The stepped column can be equalized as an ideal column with the same deflection curve and geometric constraint. So the critical force of the equivalent ideal column with build-in base and free at the upper end is shown as

The length coefficient

Length coefficients using the hypothesis of parabolic deflection curve
By assuming the deformation curve of the stepped column, the critical force of the stepped column buckling can be calculated by the energy method. In view of the resemblance between the parabolic curve and the cosine function in a narrow region, some scholars have proposed using the parabolic curve to replace the cosine deflection curve. The following is mostly used

Then the strain energy is
The work of the critical load is

The length coefficient

Analytical method
Recursive formula of buckling with n-stepped column
Considering that the energy method uses the assumed curves to approximate the deflection curve of the stepped column, it is equivalent to applying nonexistent constraints on the stepped column. So the error is unavoidable. Moreover, second-order approximation of the differential curve is used to compute the work of the external force when using the energy method. Truncation error is also unavoidable. For the stepped column with n sections, it will produce large errors in the accurate calculation. For the stepped column with n sections, differential equations of every section can be established like the ideal column as shown below and the diagram is shown in Figure 2
Equation (20) can be unified as


The general solution of equation (20) is

Some constants of integration are determined from the conditions at the build-in end of the column


In the matrix representation,


Equation (23) can be rewritten as

The recursive formula of the constants

Substituting the conditions at the top of the stepped column

Substituting equation (30) into equation (29), the characteristic equation of the stability of the stepped column is obtained. For a specific stepped column, with all known conditions substituted into formula (30), it turns into a nonlinear equation with P as the only unknown. Namely, the characteristic equation is a transcendental equation and can be expressed as
Solving the transcendental equation, the critical force

When

When

where

According to the mathematical induction, it is very easy to testify the buckling characteristic equation of the stepped column with n sections as follows

where



Numerical solution of the transcendental equation
The established equation set of the stepped column with n sections is shown in formula (36). The recursive formula is quite complicated when the section number is more than two. So far, this type of transcendental equations cannot provide the analytical solution. Only numerical solution is available. The numerical solutions that are used commonly include the Euler method, Runge–Kutta method, and Gauss–Newton method. But these methods may not solve the transcendental equation set because the matrices are nonsingular. Levenberg–Marquardt algorithm 15 is used to solve the transcendental equation. The algorithm has the virtue of gradient methods and Newton method, and the computational speed can be increased more than dozen even hundred times. 16 Furthermore, this method can always obtain the optimal solutions that equation (35) involved. When the section number of the stepped column is n, the transcendental equation can be solved with the complementary constraint equations derived from formula (35)

Using formula (39), the stiffness of every stepped section can be solved. Then the buckling force P of the whole stepped column is also obtained. The length coefficients of the stepped column

Using equation (22), the stiffness of every stepped section can be solved. Then the buckling force P of the whole
Nonlinearity and interpolation of the two-stepped column
It is very clear form Figures 3–10 that the length coefficients

Mechanical model of the two-stepped column.

Mechanical model of the two-stepped column (β2 = 1.1).

Mechanical model of the two-stepped column (β2 = 1.2).
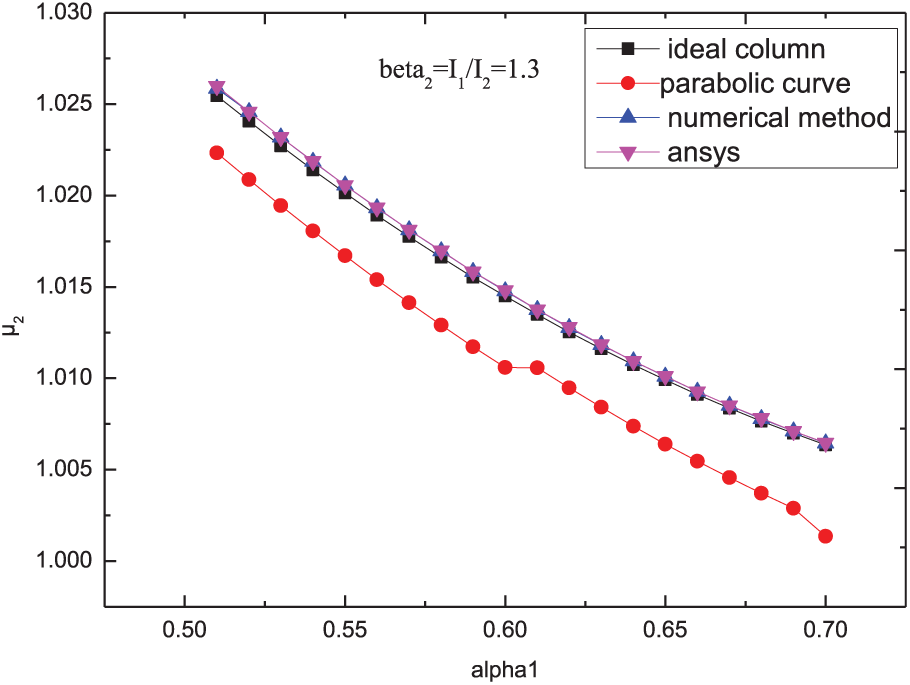
Mechanical model of the two-stepped column (β2 = 1.3).

Mechanical model of the two-stepped column (β2 = 1.6).

Mechanical model of the two-stepped column (β2 = 1.9).
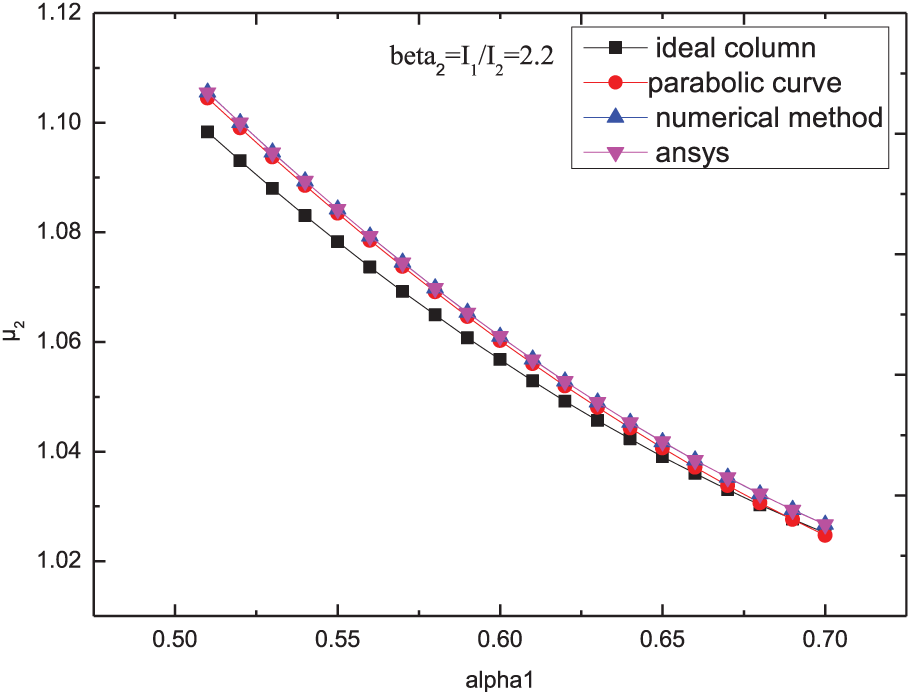
Mechanical model of the two-stepped column (β2 = 2.2).

Mechanical model of the two-stepped column (β2 = 2.5).
Length coefficient of the stepped column with multiple sections
It can be seen from Table 1 that the length coefficient calculated with the energy method of the parabolic curve as the assured curve of the stepped column with three sections produces huge error than the other three methods and the biggest error of nearly 60% compared to ANSYS, so this method cannot be used for the calculation of critical load of the stepped column when the section number is more than two. And the method using the ideal column also produces larger error than the numerical method. However, the result from the numerical method is still very close to the ANSYS result, and the maximum relative error is
Effective length factor of the three-stepped column (α1 = 0.4, α2 = 0.7).

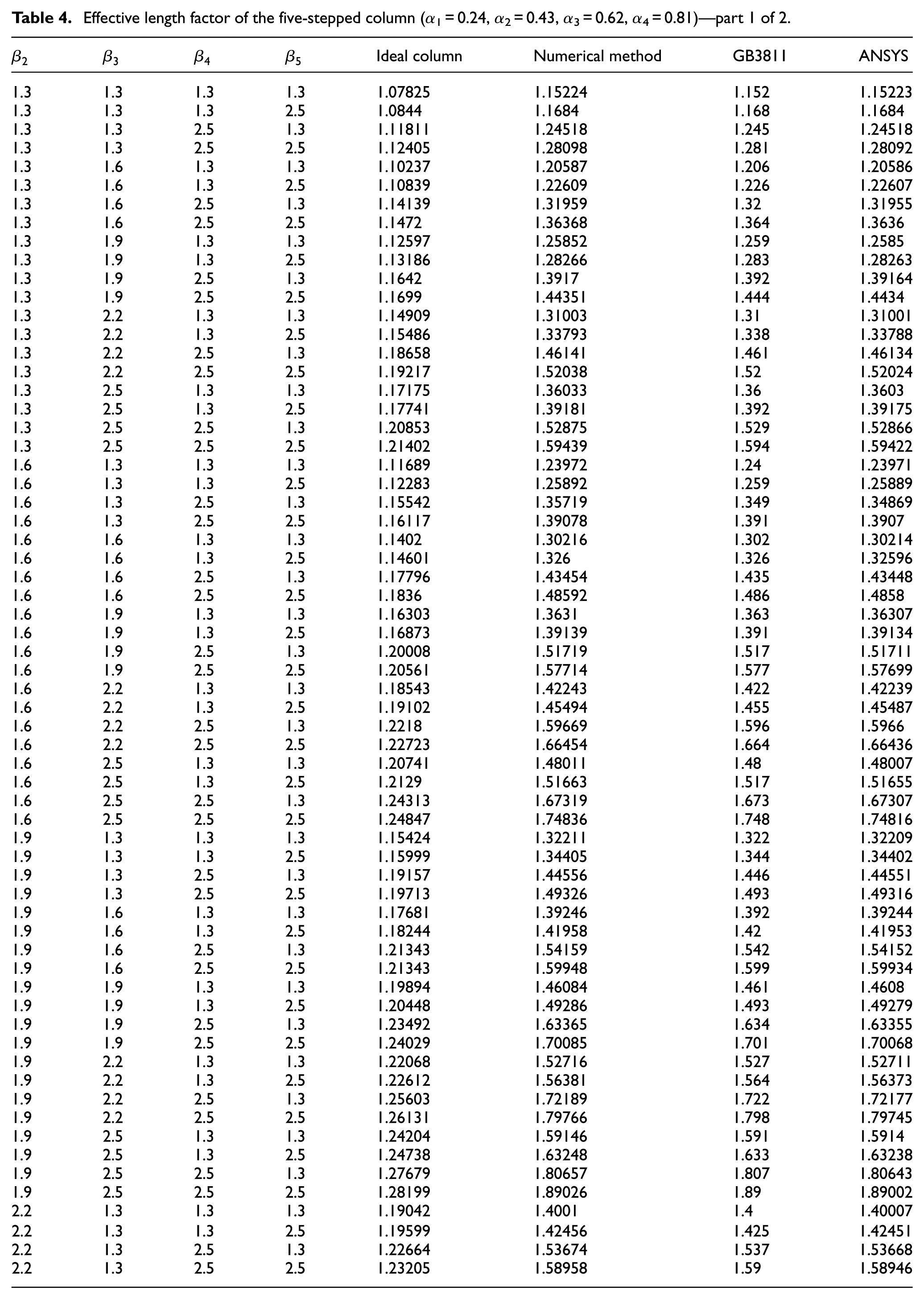
Figure 11 shows the mechanical model of the three-stepped column. Figure 12 shows the mechanical model of the four-stepped column. Figure 13 shows the mechanical model of the five-stepped column. It can be seen from Tables 2–5 that the length coefficient calculated with the numerical method is more close to the result calculated by ANSYS than those in GB3811-2008. And the method using the ideal column produces 20% larger error than the numerical method, so the energy method will produce lager error when the section number increases. Furthermore, the absent
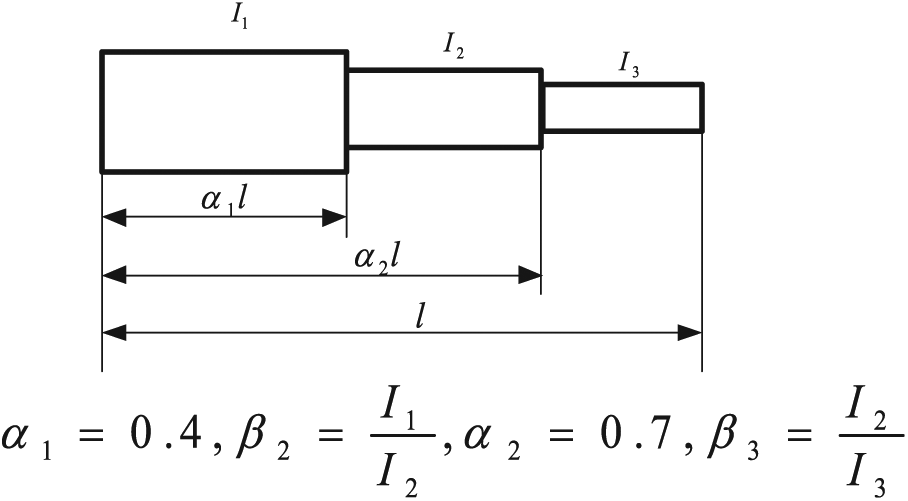
Mechanical model of the three-stepped column.

Mechanical model of the four-stepped column.

Mechanical model of the five-stepped column.
Effective length factor of the four-stepped column (α1 = 0.34, α2 = 0.56, α3 = 0.78).

Effective length factor of the four-stepped column (α1 = 0.34, α2 = 0.56, α3 = 0.78).

Effective length factor of the five-stepped column (α1 = 0.24, α2 = 0.43, α3 = 0.62, α4 = 0.81)—part 1 of 2.
Effective length factor of the five-stepped column (α1 = 0.24, α2 = 0.43, α3 = 0.62, α4 = 0.81)—part 2 of 2.

Table 6 shows the length coefficients of the stepped column with eight sections, which are compared with the ANSYS results and the results from some other studies. It can be found that the numerical method which combined the recursive formula and Levenberg–Marquardt algorithm has extreme accuracy. It will have profound influence on the large telescopic crane. Even if the section number exceeded eight, the numerical method gives accurate results.
Effective length factor of the eight-stepped column and its comparison with the reported and calculated values (α1 = 0.16, α2 = 0.28, α3 = 0.40, α4 = 0.52, α5 = 0.64, α6 = 0.76, α7 = 0.88).

Conclusion
For the large engineering crane, telescopic boom is the primary burdened member. It dominates the main performance of the crane. Compared with trusses, it is more flexible. Therefore, it is used extensively and further study of it is vital. Based on the ideal column and slightly bending theory, the energy method is used to deduce the critical load on the uniform section column and stepped column. Ideal column deflection curve, parabolic curve, numerical method, accurate finite element method used by GB3811-2008, and even ANSYS 17.0 are all used for comparison. When the section number is less than or equal to two, all the methods will not lead to too much error. Only the section number is greater than two, error will produce more and more large corresponding to the section number nonlinearly. GB3811-2008 and the numerical method produce little error than the other methods. It is insignificant that sthe Chinese National Standard GB3811-2008 only gives few combinations for the enormous combination, the inference is time-consuming, and the results are unpredictable. Fortunately, the numerical solution will produce more accurate results.
Footnotes
Handling Editor: Jining Sun
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (51575370), sponsored by the Fund for Shanxi “1331 Project” Key Subjects Construction, Postdoctoral Foundation in Taiyuan University of Science and Technology (20142020), Shanxi Province Natural Science Foundation (201701D22130), PhD Foundation in Taiyuan University of Science and Technology (20132026), and Creative Project by Heavy Machinery Engineering Research Center of Ministry of China (20172003).