
Abstract
The core contribution to this work is the development of benchmark fuel economy for a three-wheeler hybrid electric rickshaw and its comparison with heuristics controllers designed with optimal and non-optimal rules. Dynamic programming is used as a feasible technique for powertrain benchmark analysis. A parallel hybrid electric three-wheeler vehicle is modeled in MATLAB/Simulink through forward facing simulator. The dynamic programming technique is employed through the backward facing simulator, ensuring optimal power sharing between two energy sources (engine and motor) while keeping the battery state of charge in the charge-sustaining mode. The extracted rules from dynamic programming forming near-optimal control strategies are playing a vital role in deciding overall fuel consumption. Unlike the dynamic programming control actions, these extracted rules are implementable through the forward facing simulator. From the simulation results, it can be concluded that a substantial improvement of fuel economy is achieved through the application of dynamic programming. Rule-based (near-optimal) strategy using dynamic programming results shows about 9% more fuel consumption as compared with the dynamic programming (benchmark solution), which is then compared with non-optimal rule-based heuristics controller. It is shown that non-optimal rule-based controller has 18% more fuel consumption than dynamic programming results.
Introduction
Environmental challenges and reduction of global crude oil reserves gained the attention of researchers and automobile manufacturers for exploration of novel vehicle technologies. Hybrid electric vehicles (HEVs) established a thought for minimizing the fuel consumption and greenhouse gas (GHG) emissions. Transportation sector consumes about 66% of total oil consumption throughout the world and 50% of that is utilized by small passenger cars and trucks. 1 In this unique circumstance, automakers must lessen the oil consumption and GHG emissions by presenting advanced fuel efficient innovations and furthermore by utilizing alternative fuels. The focus of the research is on a parallel hybrid electric rickshaw where the internal combustion engine (ICE) and the electric machine are mechanically coupled. 2 The control of power flow between the ICE and the electric motor is referred as energy management. The drivetrain topology includes the power flow routes and the transmission ratios between the two power sources (engine and motor) and the wheels of the vehicle. To achieve better fuel consumption along with good acceleration performance, the major requirements of a transmission are sufficient ratio coverage and smooth operation of the vehicle. Fuel economy improvement and reduction in emissions are achieved through engine start–stop operation and brake energy recuperation. 3
The energy management strategies for HEVs are categorized keeping in view multiple criteria. On the basis of the amount of information used and the optimization method employed, the following three groups can be found in the literature: global optimization strategies, local optimization strategies, and the heuristic methods. Global optimization methods seek the optimal result, that is, the optimal power split sequence. This optimal power split sequence is guaranteed by executing a global minimization over the complete driving cycle, supposed to be decided a priori. The dynamic programming (DP) technique provides a globally optimal solution and has been discussed in several publications.2,4–6 This technique is not practicable online, for the reason of a priori information about the driving pattern and high computational demands. The real-time optimization controllers like stochastic DP and model predictive controllers (MPC)7,8 also exist in literature. Local optimization strategies do not require the information of future driving pattern, rather depend upon onboard data. The solution is provided through a sequence of local (instantaneous) minima, estimated at every instant. Equivalent consumption minimization strategy (ECMS) is one of these methods.9–11 This strategy relies on the transformation of the battery power into equivalent fuel consumption. Unlike the global optimization methods, these methods are implementable online. Heuristic methods do not accomplish any minimization, rather the control action is discovered at every instant utilizing empirical rules.12,13 The main useful aspect of heuristic methods lies in the reduction of computational time but with the disadvantage of non-optimal solution. 14
The main challenge for the designing of HEVs is the coordination of onboard energy sources and optimal power flow control for both the electrical and the mechanical paths. This requires the utilization of an appropriate control strategy or energy management strategy.
From the available global optimization methods, DP was chosen as the method for the benchmarking analysis, as it not only provides dramatically reduced computation time as compared to other graph search methods 15 but also offers implicit exclusion of infeasible solution paths. This feature is particularly important, as the implementation of a backward facing model under the assumption of correctly following a driving cycle can produce many infeasible solutions where particular components or operating states cannot meet the imposed load.
Modeling and simulation of three-wheeler vehicle drivetrain has been done in the MATLAB/Simulink environment. A prototype rickshaw has been built with a parallel architecture.
In the past, research work has been done on the HEVs as well as plug-in HEVs of varying sizes. Research has been reported on charging infrastructure, fuel economy, and the establishment of an Indian Driving Cycle for a three-wheeler auto rickshaw. 16 Another work has been presented on the energy autonomous solar/battery rickshaw which employed trickle charging using a solar panel. Optimization of different energy resources and hybridization of van deputed for carrying the charged batteries to the mother station delivery point were also performed. 17 Micro Hybrid System was developed for a three-wheeler motor taxi in which topology optimization, performance analysis, fuel consumption optimization, and emission reduction potential were conducted. 18 A study of auto rickshaw using the fuel cell with urban drive cycles was carried out using PSAT software. 19 Another study was reported on the advantages and disadvantages of two transport systems, battery-powered easy bike and compressed natural gas (CNG)-powered auto rickshaw, and also comparison of the daily income of owners of different types of rickshaws was conducted. 20 A comparison of hybrid electric systems with respect to the architecture of drivetrain for Indian cities was carried out. 21 In our earlier work, fuel economy improvement through the degree of hybridization of the vehicle was presented, and dynamic performance of hybrid electric rickshaw was analyzed. 22
Most of the research was carried out on electric auto rickshaw, in which swapping of batteries was proposed, in a case of fully discharged batteries. Different stations were proposed for the replacement of batteries, but this procedure of replacement of the batteries of a vehicle is not feasible for remote areas. The benchmark fuel economy of the hybrid three-wheeler auto rickshaw in comparison with the other control strategies is not present in the literature so far, to the best of the authors’ knowledge.16–22 DP provides optimal solution taken as benchmark solution. This solution is used as a platform for comparison with other control strategies. The rule-based (RB) strategy using DP results ensures charge sustainability by introducing a penalty function, which is the constraint for the system. Heuristic-based RB strategy utilizes the Boolean rules and threshold values for the charge sustainability and the implementation of torque distribution between the energy sources.
The significant contribution of this research is twofold. First, the comportment of the DP solution was explored for a hybrid three-wheeler auto rickshaw and deduction of implementable rules. Second, by using these extracted rules, implementation of these rules in RB controller and the comparison was made against DP results. Another heuristic-based strategy (rules not conforming to the DP strategy) based on the equal sharing of torque between the engine and the electric motor (parallel mode) is analyzed. Optimal rules versus non-optimal rules extraction is an useful work done in this research.
This research paper is organized as follows. Conventional auto rickshaw description is provided in the second section. In the third section, hybrid powertrain modeling of rickshaw is represented. Problem formulation is given in the fourth section. Vehicle modeling has been discussed in the fifth section. DP results, supervisory control, and energy management are discussed in the sixth section. Development of improved control strategy, improved RB strategy, the charge-sustaining problem, heuristic-based control strategy, and simulation results are the part of the seventh and the eighth sections. In the end, results, discussion, and conclusion with future work have been narrated in the ninth and the tenth sections.
Conventional auto rickshaw (Vespa rickshaw)
Conventional auto rickshaw shown in Figure 1 is running on Pakistan’s roads. It is a small and light-weighted vehicle, allowing maneuverability on narrow roads. It can carry two passengers with luggage, having a maximum speed of 50 km/h, and is considered to be the major source of pollution in cities of Pakistan. The primary cause of pollution is the inefficiency of the engine with poor maintenance. The new design of rickshaws came with liquid petroleum gas (LPG) or CNG as a fuel. The engine capacities range from 150 to 175 cm3 for air cooled and 200 to 275 cm3 for forced air and water cooled. Peak engine power varies from 6.3 to 8.5 hp, having fuel tank capacity of 8 to 9 L. A 12-volt lead acid battery is employed for ignition and lighting power. Rickshaw’s weight is usually varying from 260 to 450 kg. Tables 1 and 2 represent parameters of prototype auto rickshaw along with physical parameters of the engine.

Three-wheeler rickshaw.
Physical parameters of rickshaw.

Physical parameters of the engine of rickshaw.

Hybrid powertrain modeling of rickshaw
Depending on the powertrain architecture (the way of arrangement of various powertrain components), two main categories of the HEV are present: parallel and series configuration. In a series configuration, normally two electric motors exist; one acts as a motor and the other operated as a generator. The driving power of the wheels is received from the motor, which in turn receives the power from the generator connected to the engine or from the battery bank. Thus, there is an electric summation of engine and battery power. In parallel HEV, the mechanical summation exists between the ICE and the motor, and the torques from the two power sources are combined before the manual transmission (MT). The parallel configuration of hybrid electric rickshaw is selected for simulation purposes (shown in Figure 2). Because it is a small vehicle, the series architecture is not implementable due to less space available. The MT is configured with four ratios: 0.18, 0.32, 0.50, and 0.85. The total weight of the vehicle is 600 kg, the tire radius is 0.205 m, and the final drive ratio is 0.22. For a driving cycle, the selection is made of Manhattan drive cycle with the vehicle velocity history




where

Parallel architecture of the vehicle.
List of symbols.


Velocity profile of Manhattan drive cycle used for the evaluation of the designed control strategies.
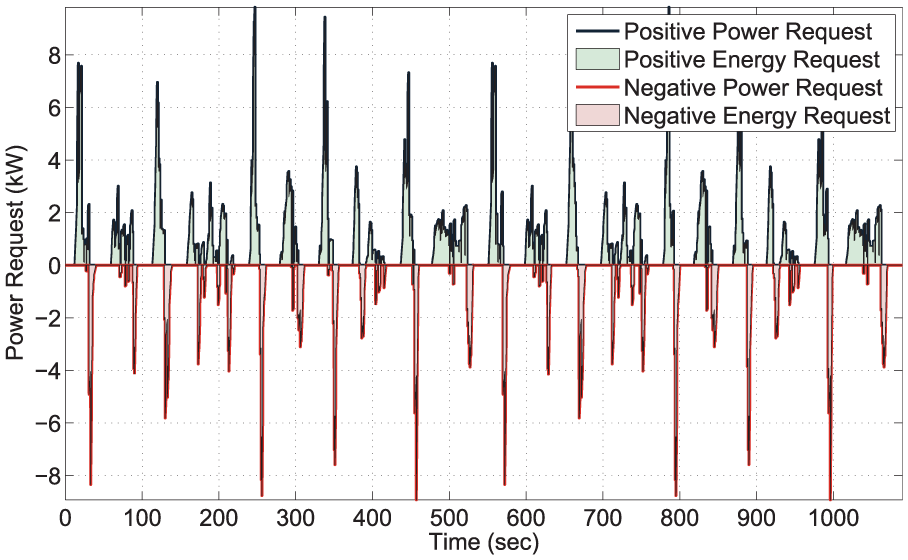
Power profiles of Manhattan drive cycle.
Problem formulation
A discrete-time dynamic system for the HEV is described as2,24

where the state
Generally, an objective function is represented as follows



where
The state of charge (SOC) of the battery is represented by a state variable


where SOC: state of charge,
With the operating range of the system components

where
The

The above equation shows that battery energy
DP
DP gives the solution of an optimal control problem in a numerical form, which are the requirements for the global optimality. 24 For the implementation of the DP algorithm, a MATLAB code designed at ETH-Zurich 25 was used. This algorithm uses Bellman’s theory of optimality for solving discrete-time optimal control problems. 26 The model equation includes many state variables along with the input variables. The equation exhibits time-varying state along with the input constraints. In the control problem, the user provides the number of controls that have to be optimized, while keeping the constraints not to be violated. These optimized controls are applied vis-à-vis to a model of vehicle that produces a grid of feasible SOC values corresponding to these control variables. Thus, with a given driving cycle, the DP furnishes the optimal combination of control inputs. 27
Basic algorithm
Let
where

where
End cost computation step

Intermediate calculation step for

The optimal torque split factor is given by the argument that minimizes the right-hand side of equation (10) for each
Vehicle model
The performance of DP is highly related to the accuracy and the number of states of the model used for the DP. For the DP procedure, a simple but operating mathematical model (quasi-static model) is preferred over a complex non-linear model. These models are extensively used for the designing purposes and pre-judgment energy management methods of HEV. Obviously, the mutual association between the energy management methods and standard transient maneuvers is not depicted by such types of models, but if the focus is on the improvement of fuel economy, they are quite reasonably serving for the comparison of the global interpretation of different energy management strategies. Also, the forward model simulator is used in the implementation of our vehicle design.
In literature, two types of HEV modeling simulations are investigated: forward and backward facing simulation models. In the forward simulation approach, a proportional integral derivative (PID) controller is employed that compares the desired and the actual velocity, in response to torque demanded by the driver model and torque generated by the powertrain as shown in Figure 5. In the backward approach, a driver model is absent, since it is assumed that the vehicle speed is known and the torque demanded (through a drive cycle) is computed through the model as shown in Figure 6.

Forward facing simulator to illustrate the power flow among the main components of a parallel HEV.

Backward simulator for implementation of the DP control strategy.
The inputs needed for backward simulator comprise of speed
Engine
A quasi-static model is applied for the representation of the engine. The static map obtained from the actual data of the vehicle settles fuel consumption rate. The fuel consumption is a static function of two independent variables: engine torque and engine speed. In the model under study, an assumption was made that the engine is in hot condition; hence, the effect of engine temperature is neglected. The fuel consumption is calculated using the following relations 24

where

Fuel maps and operating points of the engine for the DP and rules extracted from DP control strategies.
Electric machine
The efficiency of the electric machine is modeled as a quasi-static map of its power and operating speed, with the assumption that the efficiency



The motor used in the hybrid electric rickshaw.
Physical specifications of the motor and battery.

The operating points of electric motor drawn on the efficiency maps are shown in Figure 9.

Efficiency maps and operating points of the electric motor for the DP and rules extracted from DP control strategies.
Battery
The battery pack comprises of multiple modules with a combination of parallel and series cells which as a whole act as a voltage source and a series resistance. The internal power of the battery

Due to the dependence of the electric system on a battery, the energy storage capacity of battery should be more than that required to meet the drive cycle. The advantage of excessive energy storage gives the liberty to operate the battery within narrow SOC range (about 5%–10% at most), which in turn enhances the battery cycle and its calendar life. The next state of charge,

where

The battery model for the hybrid electric vehicle.
Torque split factor
In hybrid vehicles, the energy management strategy decides in every step the sharing of torque between the ICE and the electric machine. The engine torque demand

The friction torque of the engine and the electric motor is calculated as follows

where

It is worth mentioning that the engine frictional torque has to be furnished even for the electric driving mode, for the reason of coupling of engine and motor, and, also, normally an assumption is made that inertia of the gearbox and final drive (differential) is negligible.
Optimization results of fuel economy
While optimizing fuel economy, the initial and final constraints on SOC of the battery are chosen to be 0.55. Simulation outcomes of the vehicle specified under the DP policy and RB strategies are demonstrated in Table 5. The quantity of fuel used in the RB (extracted rules) and DP strategy is shown in Figure 11.
Fuel economy comparison.

DP: dynamic programming; RB: rule based.

Comparison of fuel used in the RB (rules extracted from the DP) and DP strategies.
RB (extracted rules from the DP) strategy
An RB strategy is easy to implement in a computationally efficient way, but resulting in a solution quite far from the optimal solution. Contrary to this, DP gives the optimal result on each driving cycle; therefore, by analyzing the control actions of DP, useful rules can be extracted and by using these rules, a near-optimal solution can be achieved. For establishing RB strategy from DP, extensive simulations are produced through which an appropriate optimal driving pattern is searched for the specified driving cycle, encompassing both urban and suburban driving patterns. A deep analysis of the results enables us to search for common decisions of the algorithm that is then reproduced by suitable rules.
31
The input variables like the gearbox power
Supervisory control
For understanding the comportment of the supervisory control, the operating mode decided by DP was plotted between the gearbox input power
With low torque and speed (region A), the powertrain operates in electric vehicle (EV) mode, with the clutch in open position and the ICE is off.
The area (region B) is above ICE idle speed and positive gearbox torque. By carefully analyzing this area, the conclusion is made that the parallel configuration exists in this region.
The area (region C) exhibits each point with a negative torque, the supervisory controller switched off the engine for fuel saving, as long as the vehicle is in decelerating mode. From the above discussion about the three regions, the supervisory control rules are executed as shown in Table 6.
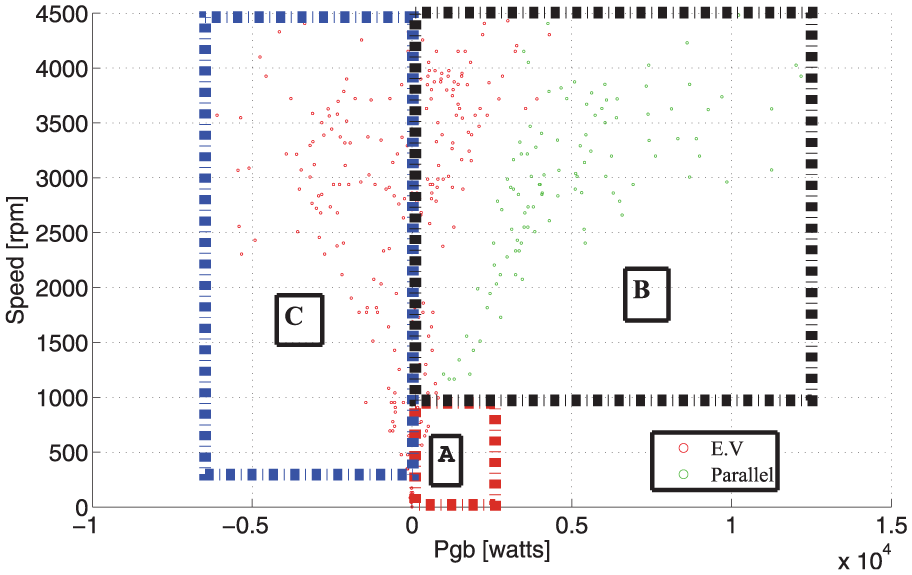
Speed versus total power required for the propulsion of the vehicle (results obtained from the DP).
Supervisory control strategy parameters.

Energy management
After the decision of mode selection by supervisory controller, power sharing between the ICE and the electric machine is decided in parallel mode.
Parallel mode
All the energy sources are coupled to the gearbox input shaft to cater for the resistive torque offered by the vehicle. The energy management controller has to decide what share of torque is provided by the electric motor and the ICE. The motor torque against total torque is represented in Figure 13 and is given by the linear function as in the following equation


Motor torque versus total torque required (results obtained from the DP).
The engine torque is provided after deducting motor torque from the total torque demand as shown in the following equation

By carefully analyzing Figure 13, it does not predict any reliance upon the battery SOC. Also, the mode selection through supervisory controller does not indicate any clear correlation between the mode selection and the battery SOC. To cater this problem, rules are modified and are explained in the following section.
Evolution of modified RB (extracted rules from the DP) control strategy
The DP control technique is not implementable in the real-time driving pattern, in that it needs the prior knowledge of driving cycle and load description. However, by analyzing deeply the DP-dependent results, improvement in the preliminary RB control technique can be attained. In this section, a modified RB control algorithm is proposed relying upon the results of the DP.
SOC control problem
Supervisory control and the energy management technique are strongly dependent on the battery SOC. Nevertheless, the rules extracted from DP do not exhibit the presence of the effect of SOC, discussed in the previous section; therefore, these rules should be modified to attain charge sustainability. The starting point of doing so involves the up shifting or down shifting of the linear laws that calculate the electric loads (parallel mode). To accomplish this goal, a correction factor p(SOC) is introduced in the linear correlations, which multiply the regression line’s intercept as shown in the following equation

It is a challenge to select the appropriate shape of correction function p(SOC). For a small divergence from the

where the divergence of SOC from the reference SOC value is given by the

where the amount of correction defined in equation (21) by a parameter
Heuristic-based RB control strategy
The RB energy management strategy, not conforming to DP rules, is developed based on engineering intuition and heuristics. The driver pedal signal is treated as a torque demand. Using this torque demand, the task of this controller is split into three control modes and the following control strategy is used:
If the vehicle speed at gearbox
If the vehicle speed at gearbox
At the point, when the power required by the vehicle goes negative, the whole negative power is used for the charging of the battery by means of regenerative braking.
The battery SOC is controlled through charge-sustaining mode, in which engine charges the battery along with the torque required by the vehicle when torque request is lower than the engine maximum torque and the SOC of the battery is less than its maximum limit

Flowchart of heuristic-based RB control strategy.
Simulation results and discussion
For the simulation purposes, Manhattan drive cycle is considered due to its frequent stop/start driving pattern, which represents the driving pattern of congested cities of Pakistan. The motor drive is facilitated by kinetic energy recuperation3,34 related to the frequent stop/start behavior experienced within this drive cycle. The rules mentioned in the “RB (extracted rules from the DP) strategy” section are executed on the simplified quasi-static model mentioned in the “Vehicle model” section. Figure 15 shows the actual and desired velocity profile of Manhattan drive cycle, demonstrating that with the proposed drivetrain components, it is possible to meet the desired speed of the drive cycle. The percentage difference between the desired and actual speed is about 2%, which is admissible. The fuel consumption through DP is about 33 km/L taken as a benchmark fuel consumption, while modified RB strategy based on rules extracted from DP (optimal sharing of the engine and the motor torque) has about 9% more fuel consumption than DP showing the near-optimal solution. Heuristic-based RB controller (not conforming to DP rules) with equal sharing of the engine and the motor torque shows about 18% more fuel consumption than DP.

Actual and desired velocity profile of Manhattan drive cycle.
The primary distinguishing factor among these strategies is the optimality of rules used. DP gives optimal solution by excluding infeasible solution paths. The extracted rules from the DP demonstrate more fidelity to the optimal solution. Heuristic-based control strategy uses basic Boolean rules and threshold values to control the power distribution between two power sources. In this technique, equal sharing of torque between two energy sources is chosen in parallel mode and is shown in Figure 14.
Almost every commercial HEV employs an RB strategy to set up torque distribution between onboard power sources. The explanation behind this choice is the simplicity of the algorithm and increased computational efficiency of the host embedded controller. This is demonstrated through the simulation results of fuel consumption of two RB strategies, one uses the extracted rules from optimal control strategy (DP) and the other strategy utilizes the rules based on human intuition and heuristics. The drawback of heuristic-based control strategy is the absence of optimal use of torque in parallel mode.
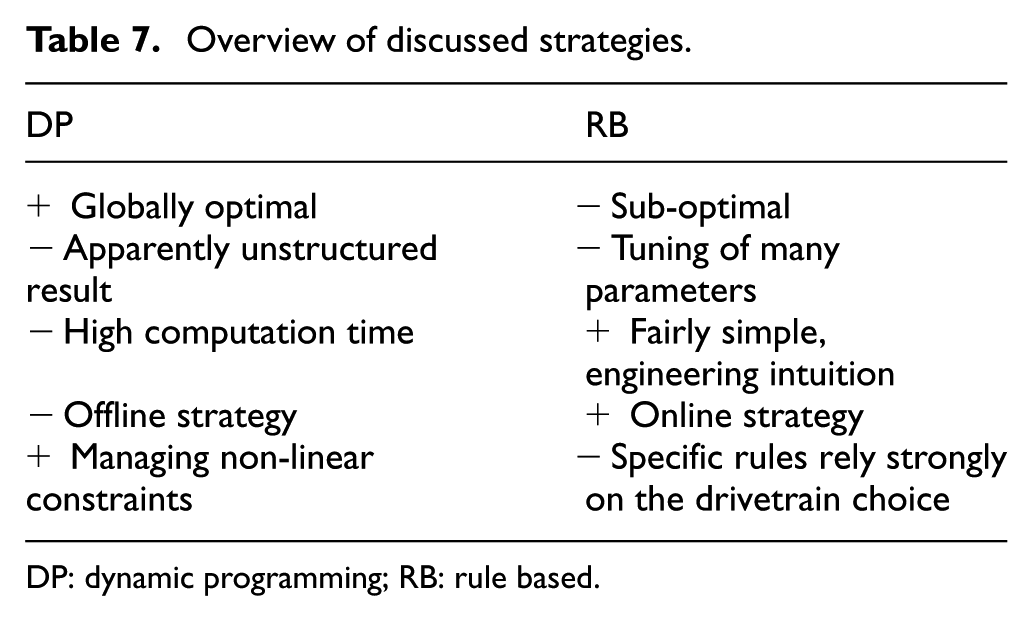
The substantial fuel economy improvement is due to the large amount of kinetic energy, 34 which can be recovered and then utilized by the electric motor. Implementation of the DP is done through backward simulation, in which it is assumed that the vehicle follows the velocity pattern exactly. From Figure 16, SOC pattern of the battery demonstrated in DP and RB strategies does not exactly match, but the charge-sustaining is attained. As the SOC is well maintained during the whole cycle, the fuel economy improvements are directly comparable with RB strategy without the fuel correction. The pattern of SOC of two strategies shows the similarity in power sharing between the two energy sources (with a minute difference). This is natural because we are following a threshold value, not every operating point of the motor operation. The mode choice of RB strategy is shown in Figure 17. The supervisory control (which decides the mode selection) is well replicated in Figure 17, showing each mode of operation. Finally, the merits and demerits of these two strategies (DP and RB) are summarized in Table 7.

Battery SOC variation in DP and RB (extracted rules from the DP) strategies.

Mode choice of RB strategy.
Overview of discussed strategies.
DP: dynamic programming; RB: rule based.
Conclusion
In this article, the benchmark fuel consumption has been estimated through global optimal method (DP) for a parallel hybrid electric rickshaw and assessed, via a backward facing simulation, against Manhattan drive cycle. These benchmark results were used to generate near-optimal rules for the heuristic controller, which gave 9% more fuel consumption. However, the heuristic controller devised using non-optimal rules gave 18% more fuel consumption. The simulation results show that the proposed energy management strategy is able to provide substantial improvements to a parallel HEV in terms of fuel economy. Due to significant fuel saving, it is a viable option to operate a hybrid three-wheeler auto rickshaw in the densely busy roads of Asian cities.
A future direction to this work lies in searching for different topologies of drivetrain with the actual trials of the designed vehicle on the chassis dynamometer. Also, the designing of plug-in hybrid electric rickshaw with the estimation of control parameters through extended-state-observer-based output feedback non-linear robust control with backstepping is in our future plan.
Footnotes
Acknowledgements
The authors would like to acknowledge Center for Energy Research and Development, Lahore (Punjab), for furnishing technical support for this research project, and theoretical support of Control and Signal Processing Research Group (CASPR) of Capital University of Science & Technology, Islamabad 44000, Pakistan.
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.