
Abstract
Precise motion control of remotely operated vehicles plays an important role in a great number of submarine missions. However, the high-performance operations are difficult to realize due to the uncertainty in system modeling with self-disturbance. On the basis of the multibody system dynamics, self-disturbances from the tether and manipulator have been systematically analyzed in order to transform them into observed forces. A novel S surface–based adaptive recurrent wavelet neural network control system has been proposed on the nonlinear control of underwater vehicles, with its recurrent wavelet neural network structure designed for the approximation of the uncertain dynamics. Moreover, a robust function has been proposed to improve system robustness and convergence. The comparison shows that the remotely operated vehicle operation performance including the three-dimensional path following and vehicle-manipulator coordinate control has been greatly improved.
Keywords
Introduction
Remotely operated vehicles (ROVs) have been applied worldwide for various operations such as environmental survey, harbor inspection, petroleum hunting, and scientific investigation and even wrecks recovering. 1 Remotely operated vehicle manipulator system (ROVMS) plays an important role in a number of submarine missions for marine science, oil and gas exploration, and salvage. 2 In these application fields, the motions of ROVMS are usually teleoperated from a human pilot with a master manipulator on the surface control platform, the ROV is applied as a mobile platform for its slave manipulator operation. 3 However, the teleoperated master–slave manipulation systems often puzzled with simultaneously control on tens of degree of freedoms (DOFs) particularly because of the system interactions between the vehicle and manipulators. 4 In the last decades, increasing research has been focused on precise motion control of underwater vehicle and manipulator systems. 5 Although some projects endeavor more autonomous operation on the intervention autonomous underwater vehicle (I-AUV), 6 ROVMS with long duration of operation time, and equipment carrying flexibility, still can perform more accurate tasks. 7
A teleoperated observation class ROVMS is usually an open frame one with one manipulator at the front and weight about 100 kg, such as American Seaeye Falcon ROV 8 and French ECA H300 ROV. Although the vehicle is fully actuated, 9 observation class ROVMS carries a series of difficulties in precise motion control and operation due to current disturbances, coupled nonlinearities from the tether and manipulator. 10 Conventional control techniques which assume that the dynamic model is linear with unknown parameters usually result in great position errors. 11 Although self-learning-based nonlinear controllers are well qualified for position control, 12 disturbance-induced tether drag forces have to be investigated and overcome for the path following in complex environment.
In the adaptive and robust control methodologies of nonlinear systems, dynamic modeling is often applied in the controller to compensate and observe nonlinear effects to obtain robust control results. Sun et al. 13 introduced an adaptive and robust controller against parametric uncertainties and to realize the disturbance suppressions. Chen et al. 14 developed an adaptive robust control algorithm with the online tuning of the unknown weights and system parameters to achieve accurate tracking performance for linear motors. Yao et al. 15 proposed a nonlinear robust controller with extended-state-observer-based output feedback in order to guarantee a prescribed tracking transient performance and final tracking accuracy. In the consideration with the role of tether drag forces 16 and manipulator disturbances 17 in the operation control, some researchers have made estimations and developed model-based control methodologies 18 through dynamic modeling. 19 A decoupled proportional–derivative (PD) controller with computational tether model was developed by Prabhakar and Buckham 20 based on finite element technique. In the consideration with ocean flow, MA Jordan 21 proposed an adaptive control scheme with the tether dynamics model under quasi-stationary state. But input signal should be rich enough to excite all parameters in the system so that the adaptation algorithm can obtain the true values of the estimated parameters. A Bagheri et al. 22 have developed an adaptive neural network controller for four DOFs control of ROV on the basis of the dynamic behavior effects of the communication cable. Han and Chung 23 have proposed an optimal proportional–integral–derivative (PID) merged robust adaptive control scheme for underwater vehicle manipulator system (UVMS) with restoring forces compensation. Mohan and Kim 24 provided a generalized framework for indirect adaptive control of UVMS, with the consideration of the dynamic coupling between the vehicle and the manipulator. In the underwater operations, however, some of the hydrodynamic parameters in the models are very difficult to determine, 1 modeling uncertainties should be further considered to eliminate modeling errors. Moreover, the tethered ROVMS should be considered as an integrated rigid and flexible multibody system in the modeling and control.
For the approximation of unknown robotic dynamics, neural networks have been successfully used. Le et al. 25 proposed a feed forward neural network in the combination with an error estimator in a chattering free neural sliding mode controller. Zhang and Chu 26 used the local recurrent neural network to estimate the unknown model of the underwater vehicle and thrust online in the adaptive sliding mode controller. Van Cuong and Nan 27 applied a radial basis function network to improve the adaptive trajectory tracking control performance against the large uncertainty of the system. However, it would take a long time for the weight values of the forward neural network to reach convergence. In the combination with the learning and decomposition capability of the wavelet function, wavelet neural network (WNN) is able to overcome these drawbacks. 28 The contributions of this study are described as follows:
This study has constructed dynamic models for the ROVMS on the basis of a multibody system and systematically analyzed the operation disturbances from tether and manipulator.
A novel S surface–based adaptive recurrent wavelet neural network (SARWNN) controller system has been proposed to approximate dynamic uncertainty and realize nonlinear control for the ROVMS. Moreover, a robust function has been proposed to improve the system robustness and convergence.
Tank experiments have verified the proposed controller’s validity; in the implementation of ROVMS operation control the proposed controller is more advanced in the tethered-vehicle-manipulator system coordination.
The rest of this study is organized as follows: section “Dynamic modeling of ROVMS” investigates the ROVMS dynamic model with disturbance. An SARWNN control system is proposed in section “Adaptive recurrent WNN controller.” Tank experiments are discussed and analyzed in section “Experiments.” Conclusion is made in section “Conclusion.”
Dynamic modeling of ROVMS
Modeling construction of ROVMS multibody system
A teleoperated observation class ROVMS is usually an open-framed one with a manipulator and tether. The manipulator with multiple links is responsible for underwater intervention operations while the tether is necessary for communication and energy supply. For the dynamics of the vehicle, we can obtain from the theorem of momentum 29

where m is the mass,

Nodes construction for the tethered ROVMS.
As a hybrid rigid and flexible multibody system, the applied forces on the tether can be transformed into the disturbances on the ROVMS. The dynamic of a flexible tether moving in fluid can be described through a finite element equation 22

where s is the upstretched Lagrangian coordinate, T is the tension force exerted at s,
For the kinematics coordinate transformation from vehicle to tether,
In the tether coordinate system,

And the relationship between vehicle fixed coordinate and tether fixed coordinate can be expressed as

where
and

For the manipulator of ROVMS, the absolute velocity vector of each node can be obtained through forward propagation from vehicle to the manipulator operation end, while the interaction disturbances from manipulator to the vehicle will be obtained through backward propagation from the operation forces exerted on the manipulator operation end to the vehicle.
Through forward propagation, the velocity of each node of manipulator can be obtained as

If we set earth fixed coordinate system as
According to Denavit–Hartenberg (D-H) convention, the angular transformation matrix from the ith link to the i + 1th link is

Thus, the inertial forces and moments applying on the ith node are, respectively

where
Therefore, the dynamic model of underwater vehicle can be represented as

where
Disturbance from tether
For observation class ROVMS, disturbances from the tether are one of the most important nonlinear disturbances particularly when the current is relatively strong. 31
7The disturbance forces from the tether can be decomposed into the surface section, underwater section, ship end, and ROV end. For the tether ship end, we have

For the tether in the water
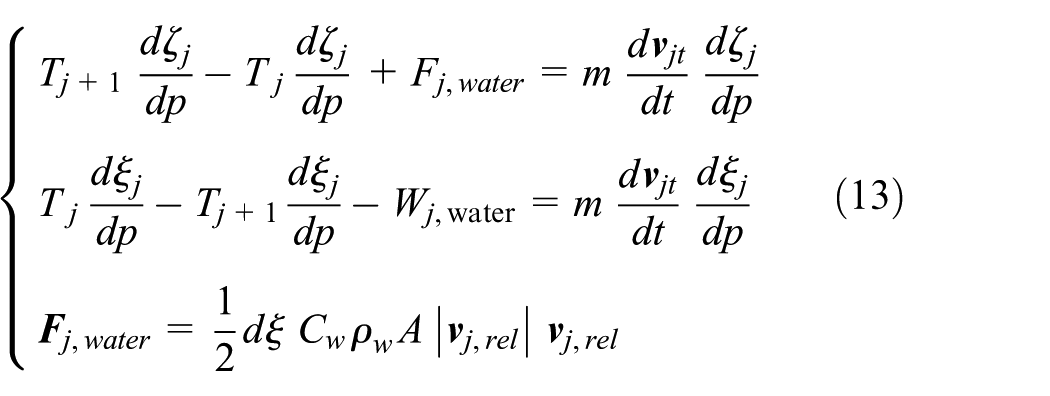
where
For the ROV end of tether, we assume

Therefore, in the local frame

where

where the position of the tow-point in the ROV end frame is

Manipulator disturbance analysis
During the manipulation process of the underwater vehicle manipulator system, interaction forces between underwater vehicle and manipulator include restoring forces resulted from the change of gravity center and buoyancy center and the coupling forces between underwater vehicle and manipulator. 32
Thus, the restoring forces resulted from the change of gravity center and buoyancy center during the manipulation can be expressed as
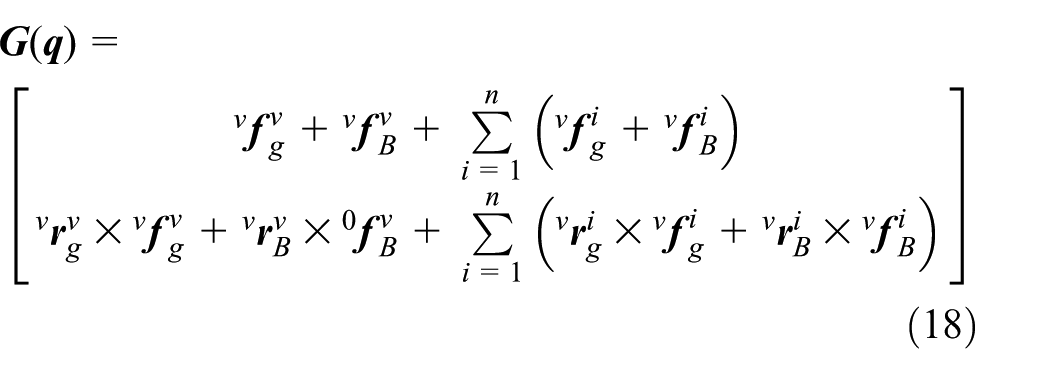
where


denote the restoring force of underwater vehicle,
On the other hand, the coupling force exerted on the vehicle from manipulator can be derived according to the following recursion



where


representing the constant vector of the ith link geometric center in the frame of the ith link. Thus, coupling forces
Therefore, the disturbance forces

Adaptive recurrent WNN controller
Recurrent WNN structure
Although the dynamic model and disturbance of ROVMS can be obtained from section “Dynamic modeling of ROVMS,” there are still some uncertain hydrodynamic coefficiencies and external disturbance to be determined. In the following, a novel recurrent WNN has been proposed to estimate and reduce the influence of modeling uncertainties. Figure 2 illustrates the structure of the recurrent WNN control: a 5-layer block diagram, which incorporates features of the WNN; the recurrent neural network technique and the fuzzy cerebellar model articulation controller. In such structure, the wavelet space can be regarded as a feature space; the features are extracted through weighting the interior states of input signals. The propagation details of the recurrent WNN are proposed in the following:
In the first layer, the input signals are defined as
In the second layer, several elements can be accumulated into a block as a Mexican Hat wavelet membership function. The Mexican Hat wavelet function has been selected as the membership basic function, and it can be expressed as the following formula
where

where
3. The third layer is the fuzzy rule layer. Each block in this layer performs as a rule. The execution for the neuron is matched with the relevant rule. Thus, the output of this layer is defined as

where
4. In the forth layer, each location can be expressed as

where
5. In this fifth layer, each output node can be expressed as

where

Structure diagram of recurrent wavelet neural network.
SARWNN controller
In the literatures of model-based adaptive control, position accuracy vector is usually defined as 27

where e is the control error,

The Sigmoid surface function is expressed as

where
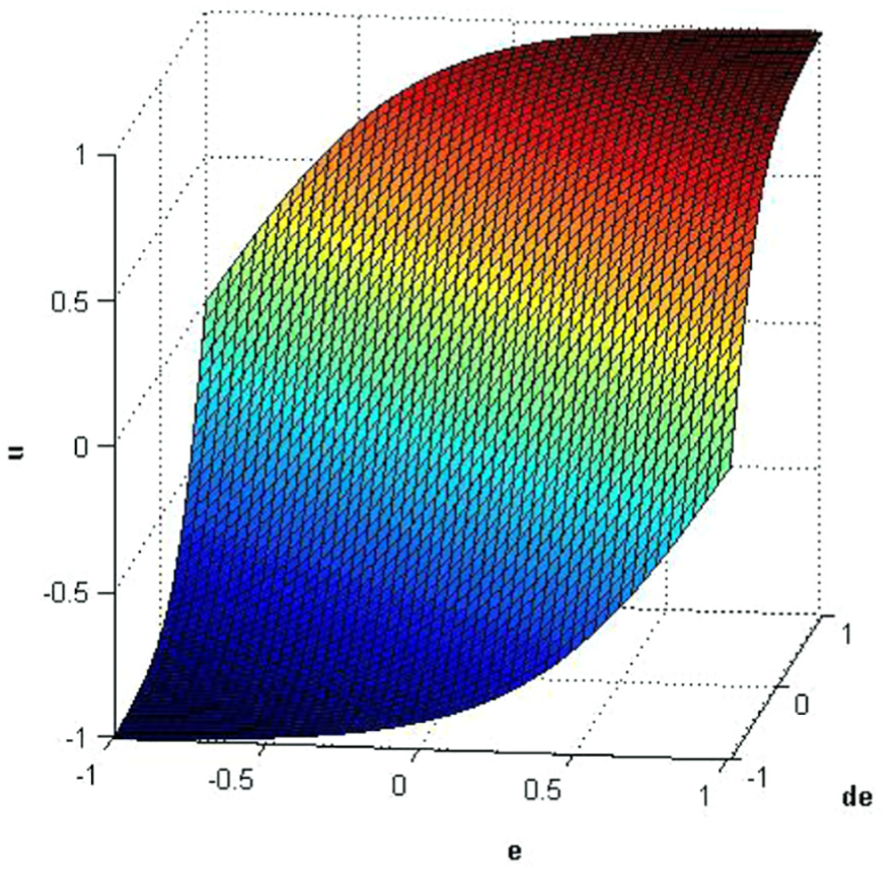
Sigmoid function.
On the basis of the Sigmoid function in equation (35), one can obtain the Sigmoid type of compensator as

where

where
By applying equation (36) into equation (11), one obtains

where

where
If we apply the controller equation (39) into the dynamic model (11), one obtains

where

where

If we define nd as the number of ROVMS DOF, nc as the constraint number of ROVMS, nm = nd – nc, one obtains

From equation (39), one obtains

where

From equations (40) and (43)

If we assume the weights limit bounded as
where

where
Therefore, the learning update law of the network is proposed as
where
Figure 4 illustrates the controller implementation diagram. For the controller feedback, the function of EKF is to estimate covariance matrix of the current position state, on the basis of ROV kinematic models. Since the vehicle velocity and posture information obtained from DVL and magnetic compass could involve sensor noise, the EKF-based dead reckoning block can obtain relatively accurate position output through measurement update and state estimation.

SARWNN controller implementation diagram.
Controller stability analysis
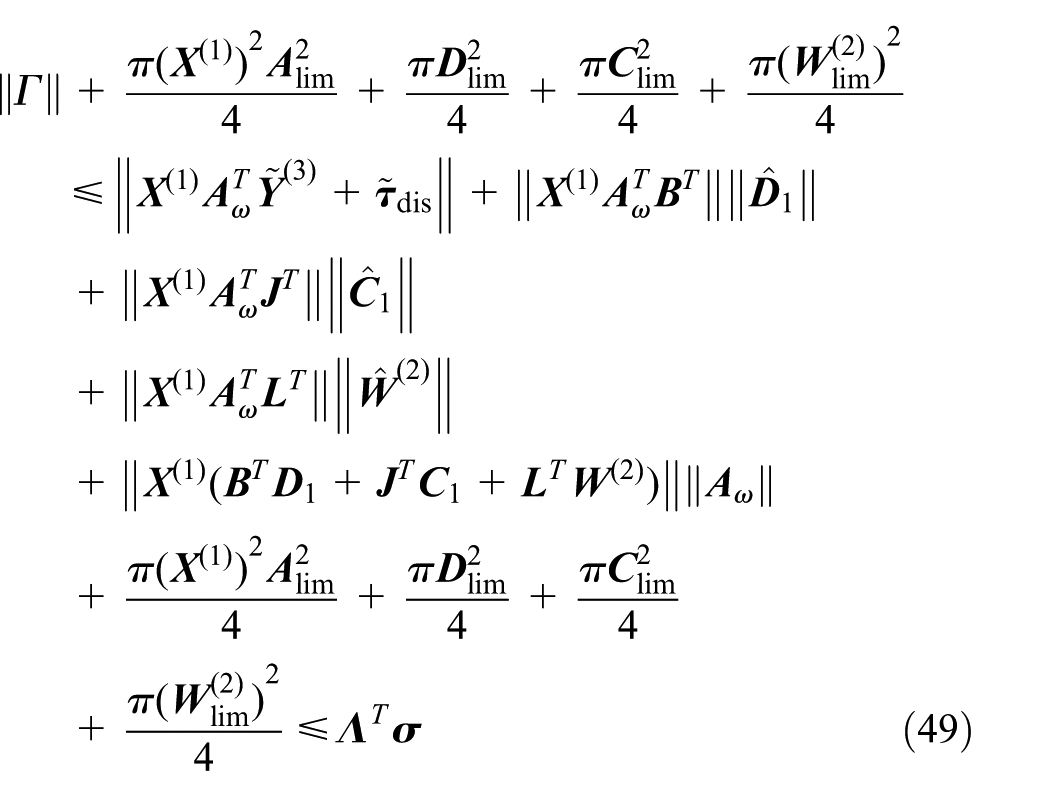
According to the Lyapunov stability principle, the Lyapunov function candidate is


Substituting equation (44) into equation (49), one obtains

From the updating law of equation (47)

Using equation (45) and
we have

Thus

Therefore,
Experiments
Experimental setup
In order to verify and analyze the above investigations, the experiments have been performed in a 50 m × 30 m × 10 m tank at the Key Laboratory of Science and Technology on Underwater Vehicle in the Harbin Engineering University. In order to simulate real oceanic conditions in the experiments, waves, and current are generated from the multidirectional waves generator and the local current generation device (Figure 5(a)), respectively. The experimental object is an SY-II ROV equipped with 3 function and 2 DOF manipulator, see Figure 5(b). SY-II ROV is an open frame underwater vehicle with PC104 as the core of the vehicle control system. Its neutrally buoyant tether is responsible with power supply and communication cable. The control commands are sent through network communication between the surface computer and the PC104 embedded processor. It is equipped with a depth gauge, a magnetic compass and a DVL as motion sensors, two main thrusters, two lateral thrusters and two vertical thrusters. The flow chart of hardware operation is illustrated in Figure 6. Parameters of its tether, hydrodynamics, and manipulator are illustrated in Figures 1,2, and 3, respectively.

Experimental setup. (a) Wave generator and current generation device. (b) SY-II ROV.
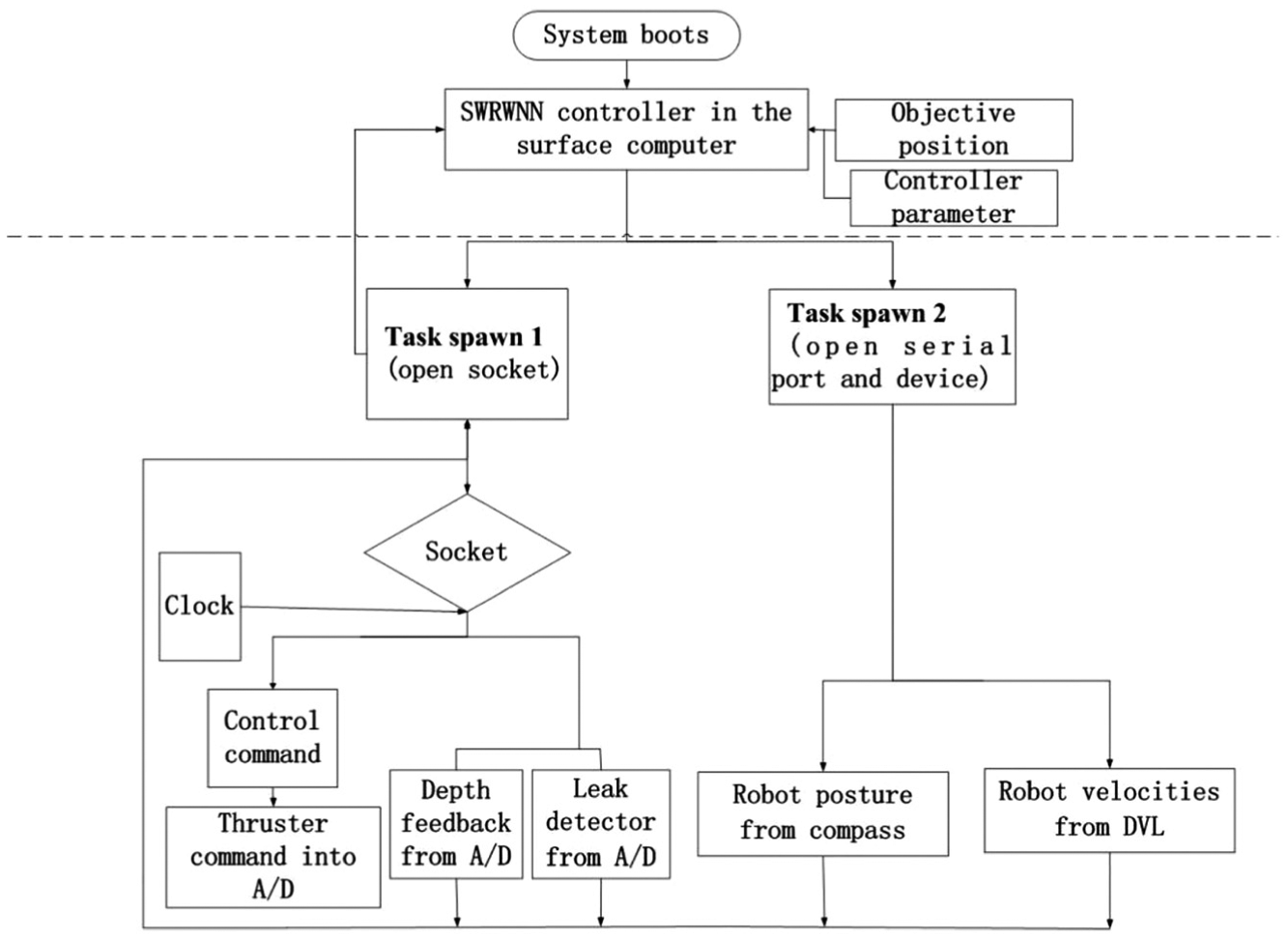
The flow chart of hardware operation.
Tethered cable parameters.

SY-II hydrodynamic parameters obtained from planar plane mechanism experiments in the towing tank.

Parameters of the manipulator.

Hydrodynamic effects on the ROVMS include added mass forces and viscous damping, which are important differences from vehicle-manipulator system on the land. The added mass forces are the reaction forces produced by acceleration movement of the body. They can be numerically calculated in the unbounded flow field through panel method. The viscous damping is more complicated, including the vortex shedding, skin friction, and potential damping. These can be determined from the full size or towing-tank model tests. 37 In the following experiments, hydrodynamic effects of the ROV are predicted through proposed recurrent WNN with the consideration of unknown parameters, in order to realize precise control.
Case study 1: position and path following control
Two experimental tests are made to evaluate the adaptive recurrent WNN controller algorithm, the first is simultaneously depth and heading control, the second is three-dimensional (3D) path following control. In order to simulate the disturbances in complex oceanic environment, we set current speed as 0.1 m/s and at the same time generate JONSWAP spectrum irregular wave (significant wave height 0.1 m, peak spectral period 1.96 s) to prove controller’s robust performance. The current speed can be obtained through ADCP/DVL Navigator, so that the tether drag forces can also be observed. Comparisons between adaptive recurrent WNN controller and S surface controller have been evaluated in the experiments. For the S surface controller,
In Figure 6, the ROV made the 3 m depth control and 150° heading control at the same time in disturbance. Comparisons have been made on the value of control parameter
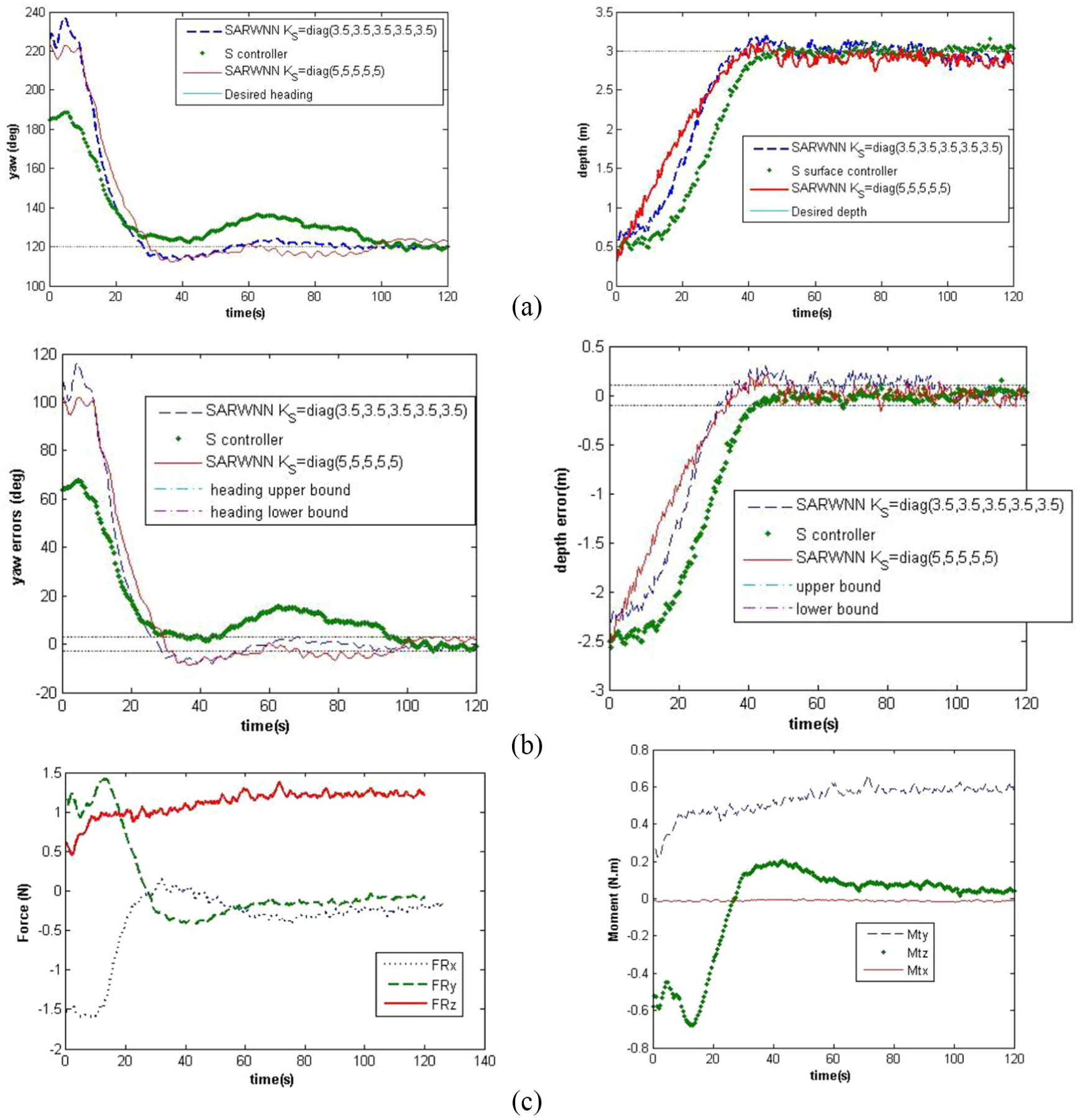
Analysis and comparison in the simultaneous depth and heading control in disturbance: (a) simultaneous depth and heading control in disturbance environment, (b) control errors in disturbance in disturbances environment, and (c) tether forces and moment on the ROV end in disturbance environment.
The path following is extremely important for ROV to accomplish precise inspection missions continuously. To testify the controller robustness, the JONSWAP spectrum irregular wave was generated as unknown disturbance during the experiments. In the path following experiments of Figure 8, the vehicle obtains its positions through EKF-based dead reckoning. Through the comparisons between the current position and the desired position, the proposed controller makes the vehicle approach and follows the path precisely. Different control parameters of proposed controller have been discussed on
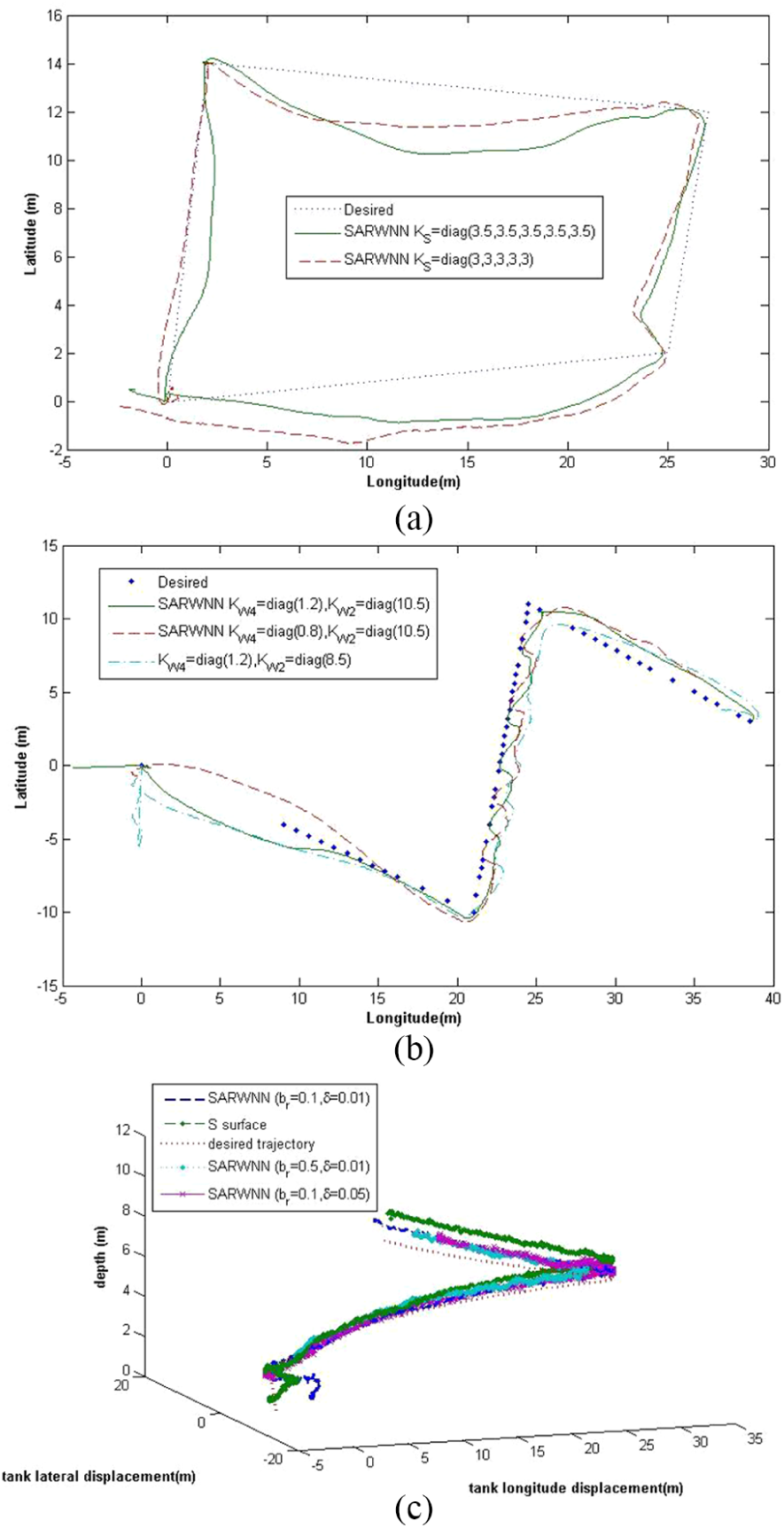
Analysis and comparison of 3D path following experiments: (a) path control in disturbance environment, (b) Z shape following in disturbance environment, and (c) 3D screw path following in disturbance environment.
Case study 2: vehicle-manipulator coordinate control
Figures 8 and 9 illustrate the coordinated vehicle and manipulator experiments for the ROV station keeping during operation. The shoulder and elbow joints rotated simultaneously, while the SY-II ROV keeps its attitude and position with the designed controller. This kind of control is very important for the high-efficiency hovering manipulation in remote or autonomous operations. During the experiments, the angular velocities of the joints were set as 0.35 rad/s. The instant acceleration of the joints is 1 rad/s2. Disturbances from the manipulator revealed that the coupling forces increased suddenly at the joint acceleration moment, while the restoring forces were dominant in the steady state with the manipulator pitching at uniform speed. The designed SARWNN controller can estimate the disturbances from the manipulator and make compensation at the same time, while the S surface controller can only compensate the vehicle motion according to its deviations. Therefore, the designed SARWNN controller can obtain more steady and accurate vehicle manipulator coordinate motions.
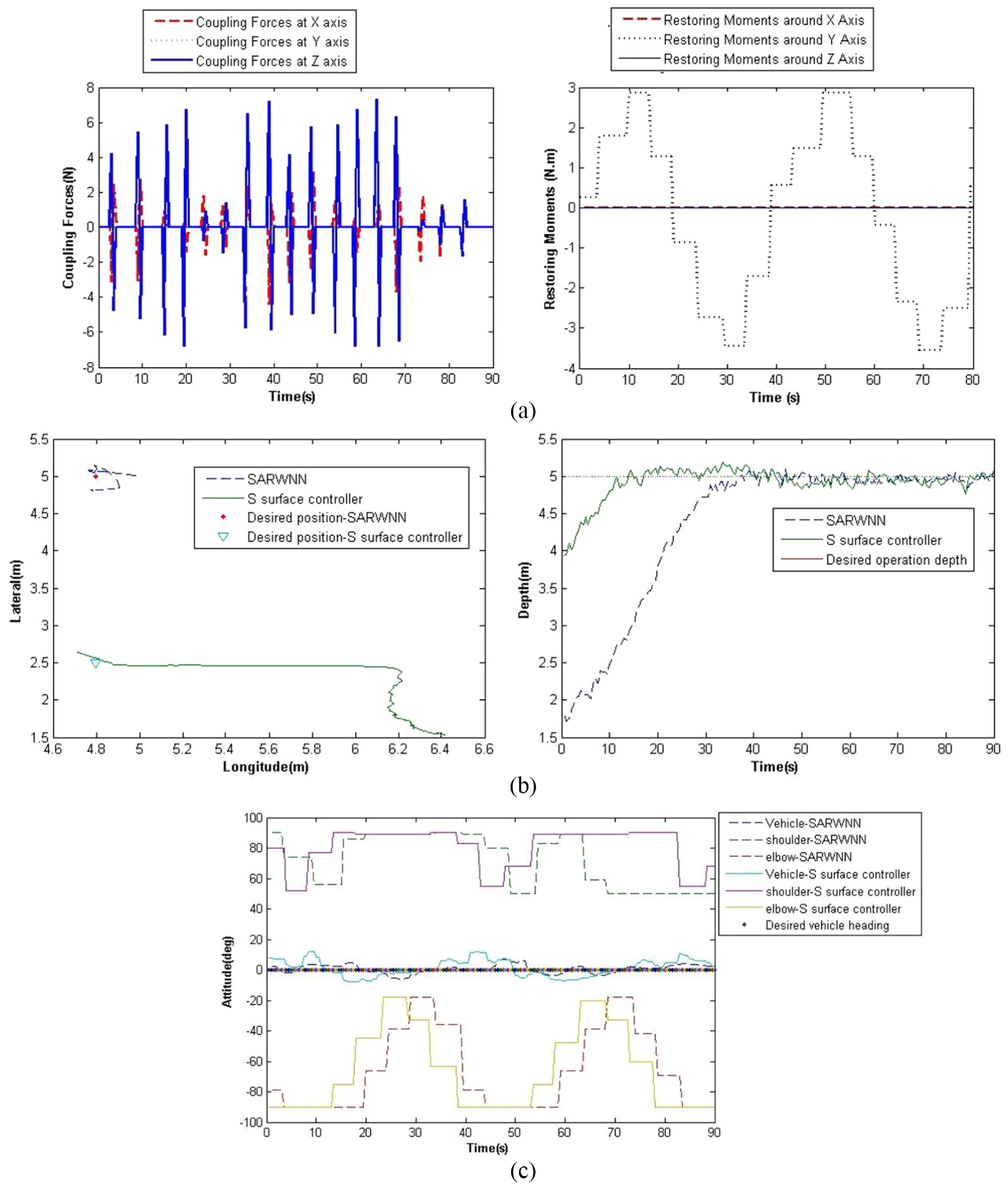
Vehicle-manipulator coordinate control experiments for the SY-II ROV station keeping operation: (a) observed disturbance including coupling forces and restoring forces, (b) 3D position of the vehicle, and (c) attitude of the manipulator and the vehicle.
Conclusion
The multibody system dynamic model of ROVMS has been established including the vehicle, tether, and manipulator. Disturbances from the tether and manipulator have been systematically analyzed in order to transform disturbances into the observed forces. The manipulator disturbance on the vehicle mainly includes the coupling forces and the restoring forces.
In order to approximate the dynamic model with parametric uncertainties, a recurrent WNN structure has been proposed. In combination with the fuzzy control concept, a novel SARWNN controller has been proposed on the control of ROVMS. The robust function improves the system robustness and convergence, which is testified through irregular waves in the path following experiments. In the 3D path following and vehicle-manipulator coordinate control experiments, the proposed controller greatly outperforms S surface control.
Future work will apply the proposed control approach in the ROV submarine operations in order to improve the precision and speed of human machine coordinate manipulation.
Footnotes
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was supported by National Natural Science Foundation of China (Nos 61633009, 51579053, 5129050, 51779052, and 51779059), Major National Science and Technology Project (2015ZX01041101), the Key Basic Research Project of “Shanghai Science and Technology Innovation Plan” (No. 15JC1403300), and the Field Fund of the 13th Five-Year Plan for the Equipment Pre-research Fund (No. 61403120301). All these supports are highly appreciated.