
Abstract
Due to the huge flight scale and the fast speed of hypersonic vehicle, the system must be of strong nonlinearity, coupling, and fast time variability, which give rise to the huge challenge for the design of controller. The good control performance must be based on the elaborately designed controller, which is established in the carefully designed center of mass. Once the center of mass moves unexpectedly, it is bound to affect the ability of existing flight controller to maintain the stability of hypersonic vehicle, resulting in serious consequences, even loss of control. Based on Newton’s laws and Varignon’s theory, a mathematical model for hypersonic vehicle with centroid shift is built up to research the influence of centroid on the motion of hypersonic vehicle. The zero-input response tests are conducted from the different aircraft body axes of the coordinate. Simulation results show that such influence is coupling, abrupt, irregular, and time-variant. In order to inhibit the bad influence of unexpected centroid shift, terminal sliding mode controller combined with radial basis function neural networks and just terminal sliding mode controller alone are adopted to handle such problems in view of robust control itself and auxiliary compensation. Simulation results show that such influence can be inhibited and compensated in a certain region, and the further research is still needed.
Keywords
Introduction
Hypersonic vehicle (HSV) is an aerospace vehicle flying at Mach 5 or above. 1 Although HSV possesses many advantages, such as a large flight envelope, high maneuverability, and good penetrability, it is very sensitive to the variation of flight conditions owing to the ultra-high altitude and Mach numbers. Besides, its dynamic model also reflects fast time varying, high nonlinear, strong coupling, and large parametric uncertainties. 2 Therefore, HSV is likely to suffer a variety of uncertainties, disturbances, and faults that come from the internal and external, such as un-modeled dynamics, external disturbances, fuel sloshing, some damages, or ablation to fuselage, and some faults of control actuators or sensors, which undoubtedly pose a great challenge to the control design of HSV.
As for the anti-disturbance, anti-uncertainties, and fault-tolerant control, a large number of controllers have been designed to handle those problems, involving the state feedback control, fuzzy control, sliding mode control, adaptive control, neural networks, based on data driven, and so on, seen in previous studies,3–7 achieving the good control effects. However, the ideal control effect is based on the carefully designed center of gravity and the high reliable controller. Center of gravity is crucial for the controller design. Once the centroid shifts unexpectedly, it must arise HSV out of the trim that can adversely affect the ability of the existing flight control system to maintain the stability of HSV, even causing the out of control or instability. As usual, the centroid shift of airplane is considered as the harmful factor, coming from consumption of fuel, airdropping freight, fuselage damage, and others, 8 resulting in the disastrous consequences for the control of the aircraft. However, not all centroid shifts will cause the loss of control for the aircraft. The World War II aviation history was filled with the stories of aircrafts coming back home safely despite suffering serious centroid shift. 9 In recent years, the mass moving control (controlled centroid shift) has been widely spread.10,11 For one reason, the actuator of mass moving control is located in the inside of the aircraft, thus avoiding the problem of the ablation of control surface existing in aerodynamic control scheme and maintaining the good aerodynamic shape of the aircraft. For another reason, the mass moving control can make up the lack of aerodynamic force under the rarefied air and improve the maneuvering performance of the aircraft, which has become one of the hot topics in the field of HSV control.
Flight control of HSV with centroid shift in off-nominal flight conditions poses enormous challenges in many fields, including aerodynamics, structural dynamics, flight dynamics, control, and so on. Thus, a comprehensive investigation from the aircraft-integrated system perspective is needed to research, aiming to provide an integrated approach to centroid shift effect physics-based modeling and simulation, safety-of-flight assessment, flight control, and recovery. 8 The general equations of motion for damaged asymmetric aircraft are established in the work by Bacon and Irene, 13 based on Newton’s laws and Varignon’s theory, which describes a set of flight dynamics equations of motion for a rigid body not necessarily referenced to the body’s center of mass. Then, the aircraft described by new model is desired to track the motion of the body’s previous center of mass reference frame when the body loses a portion of its mass. The stability recovery of damaged asymmetric aircraft is conducted by Nguyen et al. 8 Based on a neural network parameter estimation blended with a direct adaptive law, a hybrid adaptive control method is proposed for the control of aircraft with uncertain structural change. The stability and convergence of this control strategy are presented based on Lyapunov theory. However, the model of aircraft, in the works by Bacon and Irene 13 and Nguyen et al., 8 with centroid shift caused by damage is established in the aircraft body coordinate frame, which makes it hard to analyze the effect of aerodynamic force and torque on the motion of HSV due to centroid shift. The aircraft models with centroid shift of Wang and colleagues10,11 are built up for designing the controller instead of aircraft itself, which has fewer descriptions for the aerodynamic parameters. Based on the above research, it is a difficult task that how to obtain the proper transform matrix to establish the dynamic model of HSV with centroid shift in view of wind coordinate frame. Besides, since the center of mass is hard to measure, the variations of aerodynamic parameters and torques due to the centroid shift are also hard to obtain. In this article, the detailed deductions are provided including transformation matrix of coordinates, the process of modeling deduction, and the variation of aerodynamic force and torque.
This article focuses on modeling and control of HSV with centroid shift and the sections are organized as follows. Section “Modeling of HSV with centroid shift” provides the detailed process of modeling HSV with centroid shift in view of wind coordinate frame. According to Newton’s laws of motion and Varignon’s theory, the dynamic equations of HSV with centroid shift are established form two parts: linear acceleration and angular acceleration. Through a large number of coordinate transformations, the force and torque are transformed into the proper coordinate frame with the huge calculations. Then, the dynamic equations of HSV in view of wind coordinate frame are obtained. In section “Analysis of the aerodynamic, propulsive forces, and torques of HSV with centroid shift,” based on the parallel axis theorem, perpendicular axis theorem, and stretch rule, the influence of centroid shift on the aerodynamic force and torque and the inertia matrix are established. In section “Analysis of the effect of centroid shift on the motion of HSV,” taking the angular acceleration of HSV as an example, based on MATLAB, a zero-input response test is applied to analyze the characteristic of the motion of HSV with centroid shift along with single axis. In section “Example: dynamic response of HSV with centroid shift,” terminal sliding mode controller (TSMC) combined with radial basis function (RBF) neural networks observer and TSMC itself alone are applied to handle such problems in view of robust control itself and auxiliary compensation. The corresponding simulation results show that the effect of centroid shift on HSV can be handled in a certain range but more research works are also needed.
Modeling of HSV with centroid shift
Geometric characteristics of HSV
The vertical view of the HSV is shown in Figure 1, while the details of geometric characteristics and parameters can be seen in the work. 12
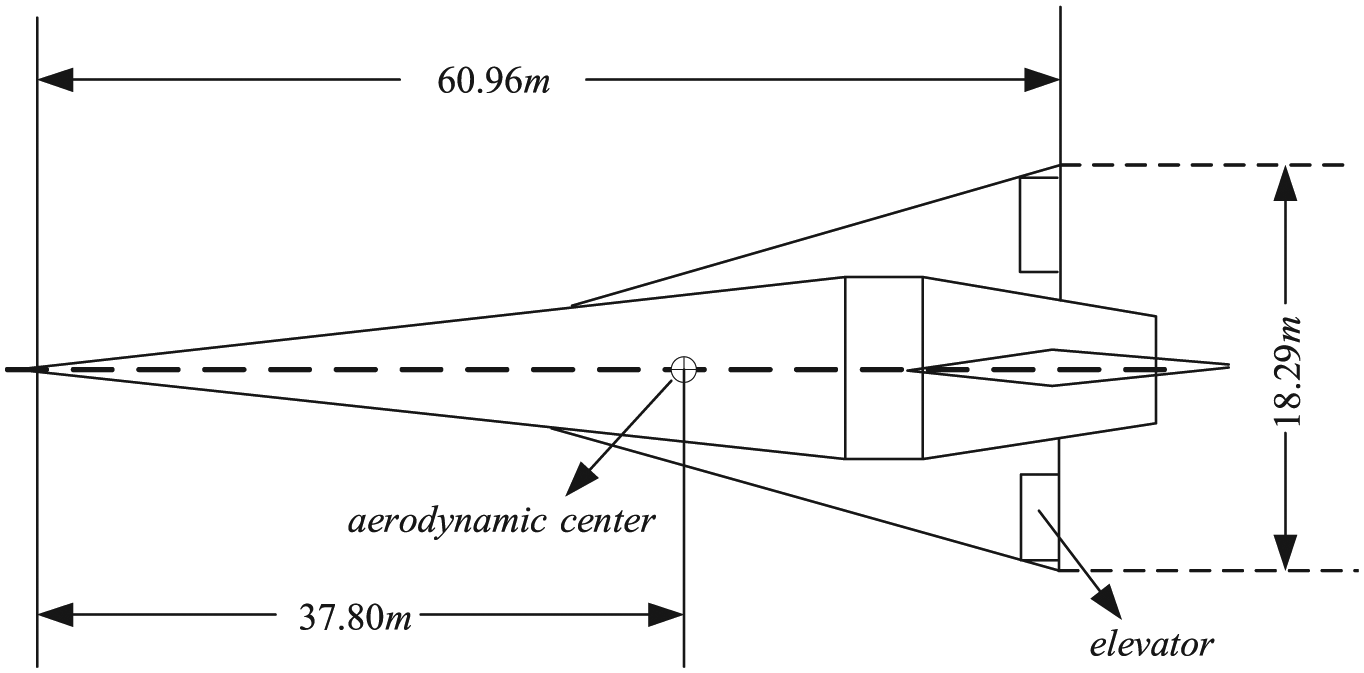
Vertical view of the aerodynamic configuration of HSV.
The three-dimensional and two-dimensional views of centroid shift are shown in Figure 2. For establishing the dynamic model of HSV with centroid shift, Newton’s law is adopted in this article.
14
Then, the dynamic equations based on the flat non-rotating earth frame, shown in Figure 2, are developed, which is applied to describe the conditions that the body loses parts of its mass, fuel consumption, or other reasons giving rise to the centroid shifting to new place

Arbitrary body referenced in inertial and body-centric frames: (a) three-dimensional view of centroid shift,
Linear acceleration
Considering the parts of HSV in Figure 2(b), the

where

where
In order to obtain

So

where

Then, we have

By substituting equation (6) into equation (2) under the



Under the assumption that the body of HSV is rigid, we have that

The angular velocity, location of centroid, and the velocity at point Z are defined in

Besides, the gravity is mapped to the aircraft body frame and we have

Ultimately, the force balance equations with respect to an arbitrary point Z of HSV are obtained as follows 16



where
In order to obtain the rotation matrix among the four coordinate frames, the relationships of four coordinate frames and eight Euler angles need to be defined clearly, and the mapping relationships between the reference frames are described in Figure 3. For instance, the relationship of

The mapping relationship between different reference frames.
Force equations of HSV with centroid shift in wind coordinate frame
According to the requirements, the states describing the motion of HSV can be selected between Euler angles
The velocity and its derivation in aircraft body frame need to be transformed into the wind frame through the matrix

where
Then, take the derivative of equation (16) with respect to t, and one has

where
As is well known, the aircraft is charged by the force of aerodynamic

To obtain the dynamic equations about the aerodynamic angles

where the concrete expansion of equation (19) can be seen in equations (91)–(93) and
Then, substitute equations (16)–(19) into equations (13)–(15), and the dynamic equations of HSV in wind coordinate frame are obtained as follows


where
Force equations of HSV without centroid shift in flight-path coordinate frame
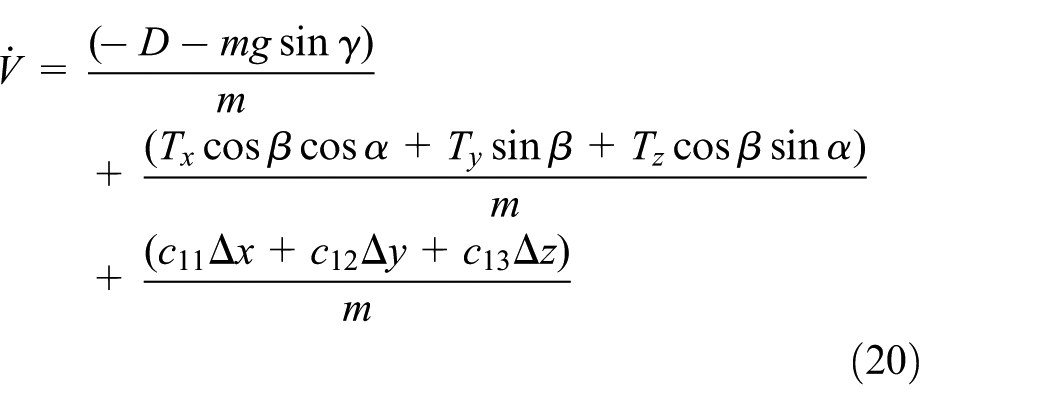
In the earth-surface inertial reference frame, according to Newton’s second law again, we obtain

where
In order to distinguish the representation of V in different coordinate systems, V is remarked as

In order to obtain the dynamic equations with respect to flight-path angles, using the formula (3), we have

where
Then, by substituting equation (25) into equation (23), we obtain

By multiplying

where

where

where
Then, by substituting equation (29) into equation (28), we have

where
Force equations of HSV with centroid shift in flight-path coordinate frame
In order to obtain the dynamic equations of HSV with centroid shift in view of the flight-path frame and the earth-surface inertial frame, take the rigid body described in Figure 3 into account again. The centroid shift in aircraft body frame

By substituting equations (24), (29), (30) into equation (31), we have
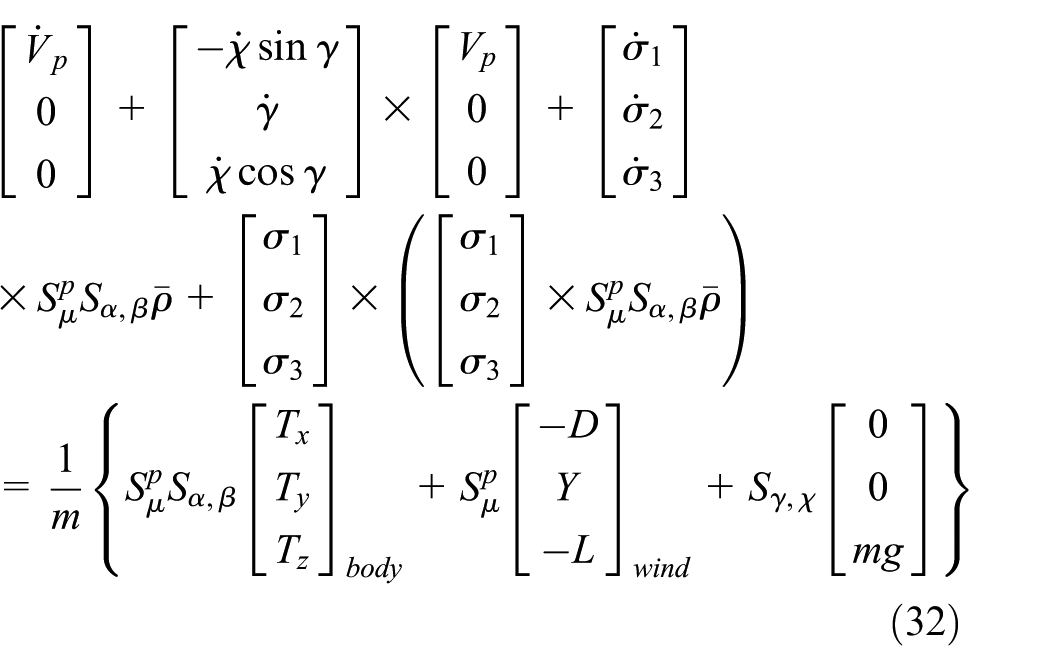
where
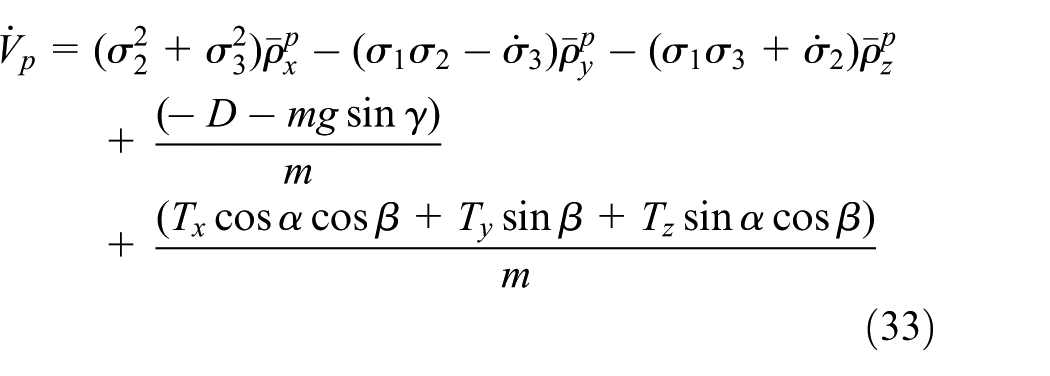
Then, by substituting equations (29), (90), (96), (97), and (99) into equation (32), the aerodynamic equations can be obtained and more details are provided in equations (100) and (101). The specifics are provided as follows


At present, the roll angle has not been involved. According to Snell, 17 we have

By substituting equations (22) and (34) into equation (36), one has

where
Navigation equations of HSV
As usual, the trace of HSV is defined in earth-surface inertial reference frame. Referring to the work by Zong et al., 15 we have

where

Then, the dynamic equations of navigation are achieved as follows

Angular acceleration
According to Figure 2(b), the

where

where


If Z is the centroid of HSV, then

where


where I is the torque of inertia matrix of the rigid HSV, which is defined in


By substituting equation (46) into equation (47), we have

Then, we obtain

If the referenced axes are not noticed, those states of HSV are described in the frame of

By redefining

The desired torque balance equations of HSV with respect to Z and

without the symmetry about the



Then, in order to facilitate the analysis, equations (54)–(56) are reshaped as follows

where I and
Torque equations of HSV with centroid shift
Once the centroid shift appears, HSV is not a symmetrical body with respect to xoz plane; therefore, the product of inertia will not maintain 0 again, namely,

where the details of
Analysis of the aerodynamic, propulsive forces, and torques of HSV with centroid shift
Variation of aerodynamic parameters of HSV
Referring to the previous studies,16,18–20 the control surfaces of HSV are composed of left and right ailerons


where

and
Variation of the moment of inertia of HSV
As for the moment of inertia, seen in equation (57), the inertia matrix is described with respect to point Z with the fuel consumption, fuel sloshing, or some reasons. The small part mass



So far, based on the theorem of vertical axis and parallel axis, we can analyze out the influence of the center of mass shift on the moment of inertia.
Analysis of the effect of centroid shift on the motion of HSV
In this section, we take the angular acceleration equation (64), for example, to analyze the effect of centroid shift on the rate of attitude angular rate. In order to facilitate the analysis, equation (58) can be simplified to the affine nonlinear function and the details are given as follows

where
The specific expressions of equation (64) are given as follows



where the details of
The affine nonlinear dynamic equations have been established. Based on equations (64)–(67), the influence of abrupt centroid shift on the motion of HSV is divided into three aspects. That is to say, the values of centroid shift are decomposed into three axes,
Case 1: the centroid shift just along with x-axis
In this case, we assume that centroid shift moves along

where the details of
By analyzing equation (68), we have that the effect of centroid on the motion of HSV in roll rate

where
As for the variation of moment applied to HSV due to centroid shift, referring to equation (60), the details are given as follows

where
In this article, we just consider the centroid shift on the motion of HSV and assume that the aerodynamic configuration of the aircraft has not changed; therefore, the equations of aerodynamic force in such simulation remain the same as previous, seen in equation (63). Some other initial states of HSV are given:
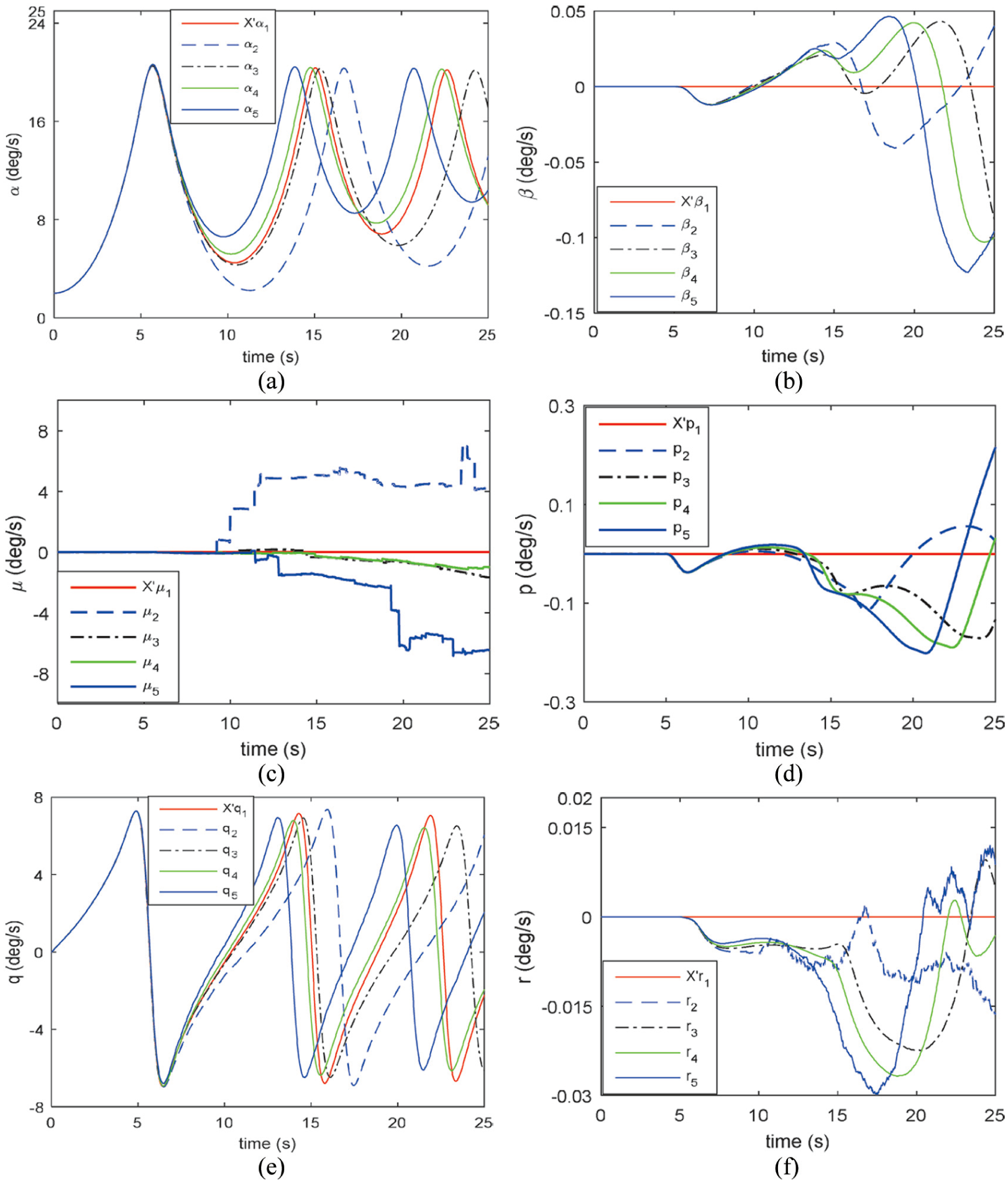
The simulation results of HSV with centroid shift along with
As shown in Figure 4, we just move center of mass along
Case 2: the centroid shift just along with y-axis
In this case, we suppose that centroid shift moves just along

where
According to equations (62)–(63), we have

where
As for the variation of moment on HSV, according to equation (70), we have

where
Referring to case 1, we also assume that the aerodynamic configuration of the aircraft has not been damaged, that is to say, the aerodynamic force applied to HSV is still the same as the previous, seen in equation (63). Some initial states of HSV are also the same with case 1 and the simulation results are shown in Figure 5.
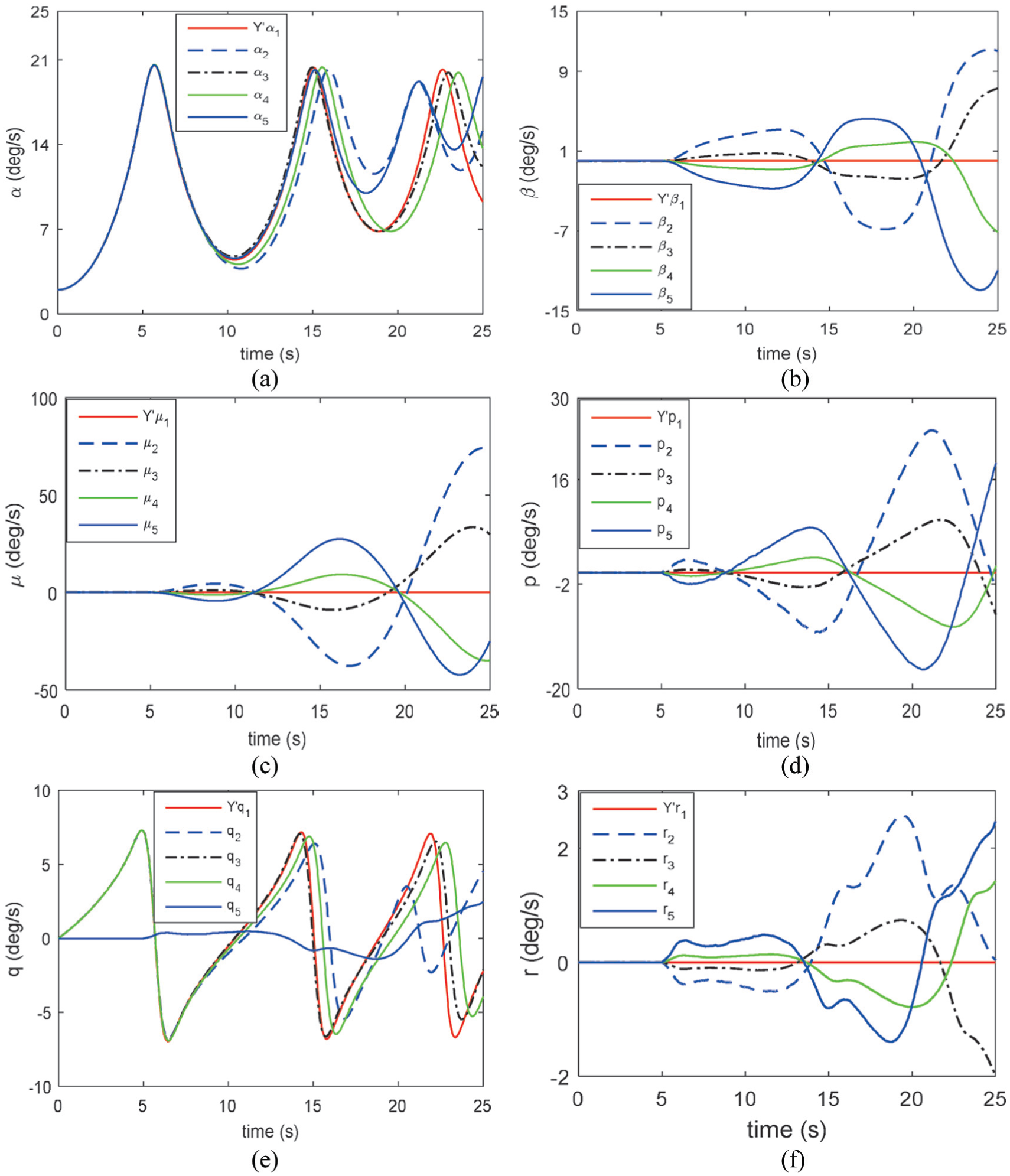
The simulation results of HSV with centroid shift along with
Comparing with equations (72) and (69), the variation of the moment of inertia complies with the following law. If the centroid shift just moves along with
Case 3: the centroid shift just along with z-axis
In this case, we assume that centroid shift moves along with

where
By referring to equations (62) and (63), we have

As for the variation of moment on HSV, referring to equation (90), we have

where
Referring to cases 1 and 2, both the assumptions and the initial states of HSV are the same, and the simulation results are shown in Figure 6.
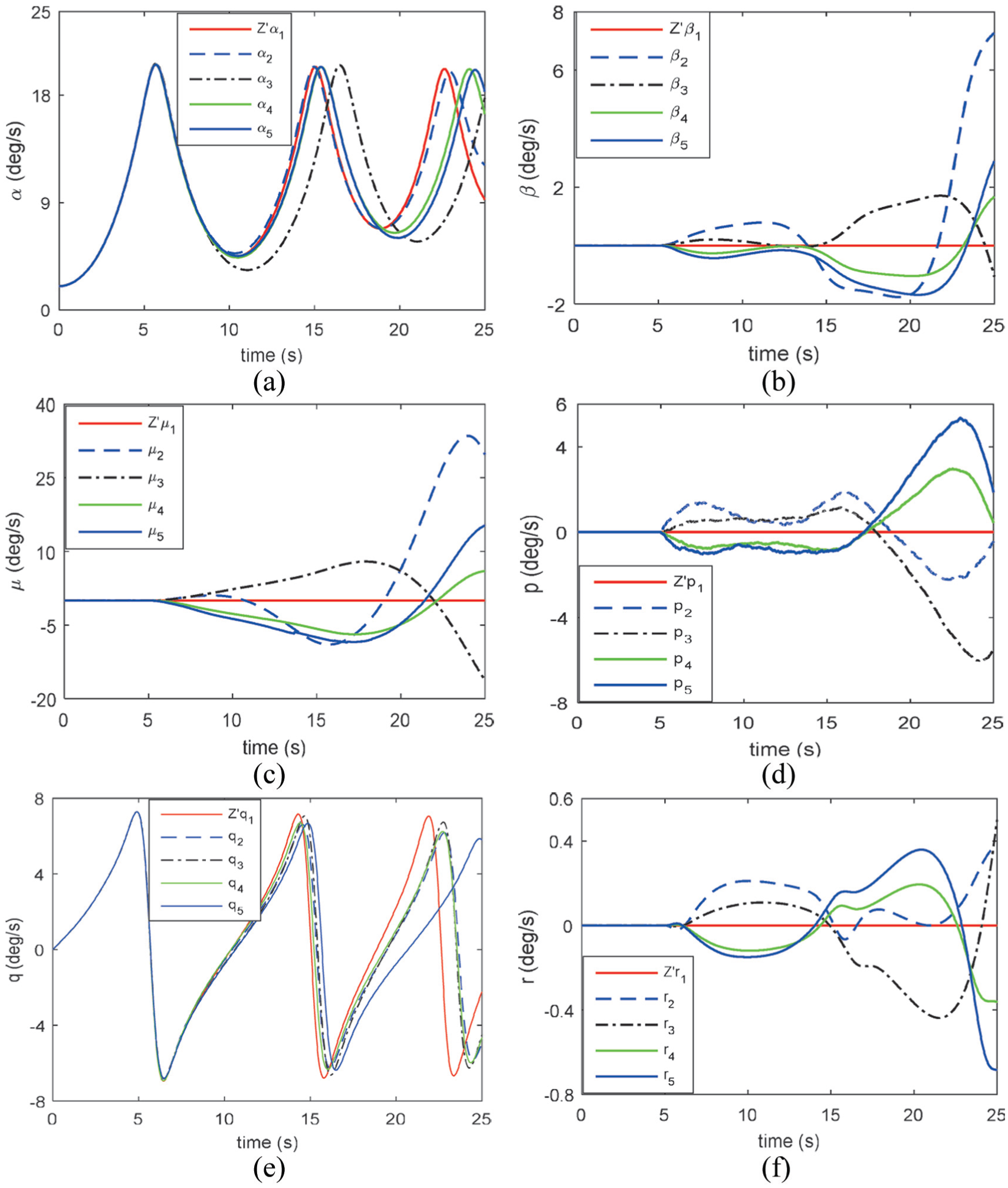
The simulation results of HSV with centroid shift along with
By analyzing the simulation results, the coupling of HSV due to centroid along with
Example: dynamic response of HSV with centroid shift
It is well known that the controller design is always following two design methods: (1) resting on the robustness of controller itself and (2) designing the auxiliary system to compensate those effects to guarantee the performance of HSV. First, the robustness of controller is reflected in itself. The TSMC is selected due to its strong robustness.21–24 For the other, referring to the previous studies,24–27 RBF neural network (RBFNN) observer is applied to estimate the whole uncertainties and disturbances caused by centroid shift.
The design of TSMC and RBFNN
The purpose of control is to track

where
Then, by derivating both sides of equation (77), we have

Order

Then, RBFNN control is applied to estimate
Considering a class of systems with the input of

where

where

where

Then, the robust adaptive control law based on RBFNN compensation is designed as follows

where

where s is the sliding mode surface,
For the limitation of the length of the article, the convergence time of TSMC and the adaptive law of RBF are just provided without the proof. The more details are seen in previous studies.24–27 The convergence time of TSMC is offered as follows

where

The TSMC control structure with RBFNN of the HSV.
The weight of RBFNN, the online update law of the center, and the adaptive control law for approximation error compensation are given as follows24–27

where
In order to guarantee the bound of estimated parameters and avoid parameter drift, we constrain

where

where
Simulation
Considering that the HSV is working on a hypersonic reentry flight with the speed of
At first, the TSMC combined with RBFNN observer is applied to handle the problem. The concrete parameters are as follows:

Simulation results of the TSMC with RBFNN: tracking effects of (a) p, (b) q, and (c) r and deflection angles of (d)
From the simulations shown in Figure 8,
The tracking effect shown in Figure 8(a)–(c) indicates that HSV with centroid shift is controllable to a certain degree under the controller of TSMC combined with RBFNN or SMDO. From the tracking effect of q in Figure 8(b), TSMC combined with RBFNN has a better tracking precision, while TSMC with SMDO has a smaller overshoot, and the same situation occurs in both Figure 8(a) and (c). The reason may be related to the sensitivity of the observer to the effects of centroid shift. As for the response rate, the TSMC with SMDO is better because SMDO with the fewer adaptive parameters and small computational can amount. From the numerical simulation results in Figures 4–6, the effects of centroid shift can be mapped some extra torque on HSV. Therefore, once the centroid shift occurs, it is bound to cause the shaking of HSV body. Then, how to stabilize HSV rapidly is crucial. From the deflection angle curves Figures 4(d)–(f) to 6(d)–(f), it can be seen that the effects of some certain centroid shift on the motion of HSV are still in the controllable range according to the simulation results in this article.
The former research works are focused on the compensation, and the other control strategy is up to the robustness of controller itself. Thus, the TSMC is adopted under the same simulation conditions,

Simulation results of the TSMC: tracking effects of (a) p, (b) q, and (c) r and deflection angles of (d)
As shown in Figure 9,
Conclusion
This article proposes a thorough research for the influence of centroid shift on the motion of HSV. First, based on Newton’s laws and Varignon’s theory, a mathematic model for HSV with centroid shift is built up. Then, a zero-input response test is conducted to analyze the effect of centroid shift on the motion of HSV. The results show that the unexpected centroid shift exerts an unpredictable and immeasurable torque to HSV, resulting in the strong coupling and uncertainties to HSV, which poses a great challenge to the controller. In this article, TSMC combined with RBFNN observer and TSMC itself alone is applied to handle such problems in view of robust control itself and auxiliary compensation. The unexpected centroid shift can be inhibited in a small region, but when the centroid shift is larger, irregular, and time-variant, the control effect is hard to predict. This article is just the beginning, and a lot of further research works are still needed, especially in the case of faults.
Footnotes
Appendix 1
By substituting equations (29), (90), (96), (97), and (99) into the both sides of equation (32), after the simplification, the left side of equation (32) is shown as follows
Then, the right side of equation (32) is described as follows
where
Handling Editor: Francesco Massi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation (NNSF) of China under grant nos 61533009 and 61374116, the Six Talent Peaks Project in Jiangsu Province (no. HKHT-010), and the Funding of Jiangsu Innovation Program for Graduate Education (no. KYLX16-0377).