
Abstract
The trajectory-tracking performance of the automobile electro-coating conveying mechanism is severely interrupted by highly nonlinear crossing couplings, unmodeled dynamics, parameter variation, friction, and unknown external disturbance. In this article, a sliding mode control with a nonlinear disturbance observer is proposed for high-accuracy motion control of the conveying mechanism. The nonlinear disturbance observer is designed to estimate not only the internal/external disturbance but also the model uncertainties. Based on the output of the nonlinear disturbance observer, a sliding mode control approach is designed for the hybrid series–parallel mechanism. Then, the stability of the closed-loop system is proved by means of a Lyapunov analysis. Finally, simulations with typical desired trajectory are presented to demonstrate the high performance of the proposed composite control scheme.
Keywords
Introduction
The automobile electro-coating conveying mechanism is the key factor that determines the efficiency of modern automobile coating. It is a hybrid mechanism, which is composed of parallel lifting mechanism, serial reversing mechanism, and independent traveling mechanism. The hybrid mechanism has the advantages of great rigidity, strong carrying capacity, high precision, low cost, and stable structure. Meanwhile, it overcomes the shortcomings of parallel mechanism, such as small working space and low bearing capacity. 1 However, the high-precision control of the hybrid mechanism is generally very challenging due to the following reasons. First, the hybrid mechanism is a highly nonlinear and coupled system. Second, the parameter of dynamic model is complex and variable because of the closed kinetic chains and kinematical restraint of parallel mechanism. Third, the hybrid mechanism is subject to different types of disturbances, such as unknown payloads, joint frictions, and unmodeled dynamics. 2
Apart from classical proportional–derivative (PD) controller, 3 proportional–integral–derivative (PID) controller, 4 and computer torque control (CTC), 5 more advanced controllers are proposed for parallel mechanism to achieve good performance, such as sliding mode control (SMC), 6 adaptive control, 7 robust control, and intelligent control.8,9 However, the performance of these controllers is easily affected by systematic uncertainties, such as parameter variations, external disturbance, and unmodeled errors. Although it is easy to apply the method of model-free dynamic control such as PD, PID, and CTC to practice, it can only compensate for some particular disturbances and parameter variations. Moreover, it is difficult to choose parameters for the controller. Adaptive control can be adopted to solve the problem of systematic uncertainty, but it involves a large amount of calculation including accurate parameters for dynamic model and the inverse Jacobian matrix. Robust control can achieve better tracking performance, but the objective of the controller is often based on the worst uncertainties. The robustness performance is achieved at the price of sacrificing the nominal control performance of the system. SMC has been widely studied and extensively applied in the control of serial mechanisms, parallel mechanisms, and hybrid mechanisms with bounded unknown disturbances or uncertainties because of its conceptual simplicity and the ability of eliminating the disturbances and uncertainties.10,11 However, when the system uncertainties, external disturbances, and parameter variations are serious, the excessive on–off gain will cause chattering problem, which results in wear and tear of the physical system and simulation of unmodeled dynamics. The phenomenon is not desirable for the serial and parallel mechanism.
Disturbance/uncertainty estimation and attenuation (DUEA) techniques provide an alternative approach to handle system disturbances and uncertainties, for example, extended state observer (ESO), 12 disturbance observer, 13 and generalized proportional integral observer (GPIO). 14 During the past two decades, DUEA has been widely and successfully applied in various engineering fields, such as robotic system, DC motors, servo control system, permanent magnet synchronous motor, and so on.15–25 Disturbance observer is the typical method of DUEA techniques. It was proposed by Ohnishi et al. 13 to improve torque and speed control by estimating load torque. The basic idea of the nonlinear disturbance observer (NDO)-based control scheme is that the unknown disturbances and model uncertainties of nonlinear systems are estimated online by NDO and then compensated within the closed-loop systems to obtain a good control performance. In addition, NDO can alleviate chattering problem and improve the system’s robustness by adding the NDO estimation to SMC law, then the switching gain in SMC only needs to be greater than the upper bound of the disturbance estimation error. Chen and Chen 26 first combined NDO and SMC to control uncertain nonlinear systems, Li et al. 27 utilized NDO in SMC of permanent magnet synchronous motor to alleviate chattering, Xiao et al. 28 applied NDO to control flight simulation platform to alleviate chattering, and Mohammed et al. 29 used SMC based on NDO to realize the trajectory-tracking control of a human-driven knee joint orthosis. According to the current literature, SMC based on NDO for the hybrid mechanism has not been fully investigated till now, which motivates the study in this article.
The main contribution of this article is that an NDO-based SMC control scheme is designed to improve the tracking performance for the automobile electro-coating conveying mechanism in joint space. Since it is difficult to directly measure model uncertainties, frictions, load variations, and external disturbances, NDO is used to estimate the internal disturbances and external disturbances. In order to enhance disturbance-tracking performance, a novel gain matrix of the NDO is designed for the hybrid series–parallel mechanism. Based on the NDO estimation, an SMC law is proposed for the hybrid mechanism, then the SMC only needs smaller switching gain, which alleviates the chattering problem and improves the trajectory-tracking performance and robustness of the hybrid series–parallel mechanism.
The organization of this article is as follows: the dynamic modeling of the proposed mechanism in joint space is presented in section “Dynamic modeling”; the NDO-based SMC and its stability are presented in “Control scheme”; in section “Numerical simulations,” validity of the simulation is discussed and analyzed in detail; finally, a conclusion of this study is drawn.
Dynamic modeling
The new automobile electro-coating conveying mechanism consists of two parts: traveling mechanism and lifting reverse mechanism. The traveling mechanism is composed of two pulleys and guide rails, which can realize the walking function of the vehicle body. The lifting mechanism is a hybrid mechanism composed of connecting leg and belt drive mechanism, which can realize the lifting and reversing function of the vehicle body. The lifting reverse mechanism has a great effect on the performance of conveyor and has relatively high control requirements. The main structure of the mechanism is as follows:

The structure of the lifting–fliping mechanism.
In this study, the dynamic model of the hybrid mechanism is built based on Lagrangian–Euler formulation method, 1 which can be expressed as follows

with
Property 1. The inertial matrix
Property 2. The matrix

The dynamic model of the hybrid mechanism in joint space can be obtained by Jacobian matrix transformation

where

where z represents the position in Z-axis,
The active joint control torque is given by

According to equations (1) and (3)–(5), the dynamic model of the hybrid mechanism in joint space can be denoted as

where
When model errors, system uncertainties, unmodeled dynamics, frictions, and unknown external disturbances are taken into consideration, the dynamic model for the joint space of the hybrid mechanism can be denoted as

where
When regarding the model errors, uncertainties, frictions, and unknown external disturbances as a lumped disturbance

Control scheme
In this article, an NDO-based SMC control scheme is designed to improve the tracking performance for the automobile electro-coating conveying mechanism. Since it is difficult to directly measure model uncertainties, frictions, load variations, and external disturbances, an NDO is designed to estimate the disturbances. Then, an SMC control law combined with an NDO is designed to alleviate chattering and improve robustness and tracking performance of the hybrid mechanism. The block diagram of the proposed control scheme is depicted in Figure 2.
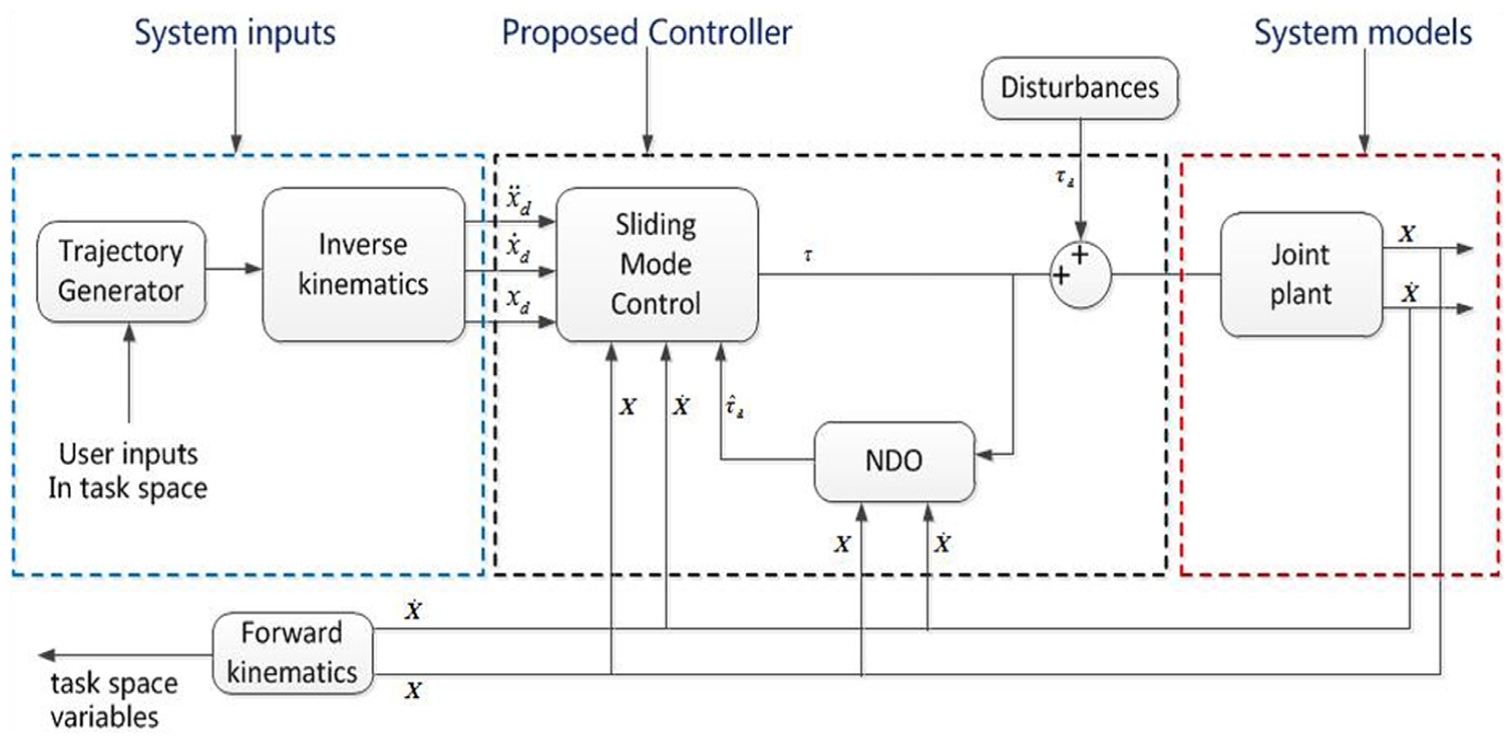
The control diagram of NDO-based SMC control scheme.
Nonlinear disturbance observer design
Assume that joint acceleration signal

where

where the vector

Invoking equations (9) and (10) with equation (11), the modified disturbance observer is given by
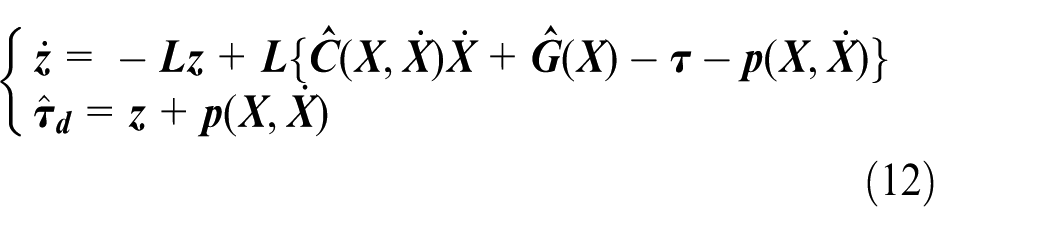
How to determine

According to equations (11) and (13),

where
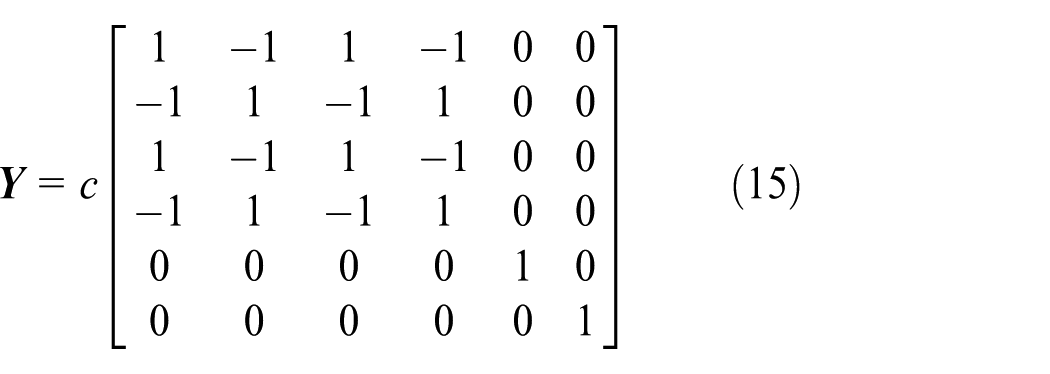
where c is a positive constant.
Assume that the rate of change of the disturbance

Define the disturbance observer error

From equations (11), (12), and (16), the error dynamics becomes
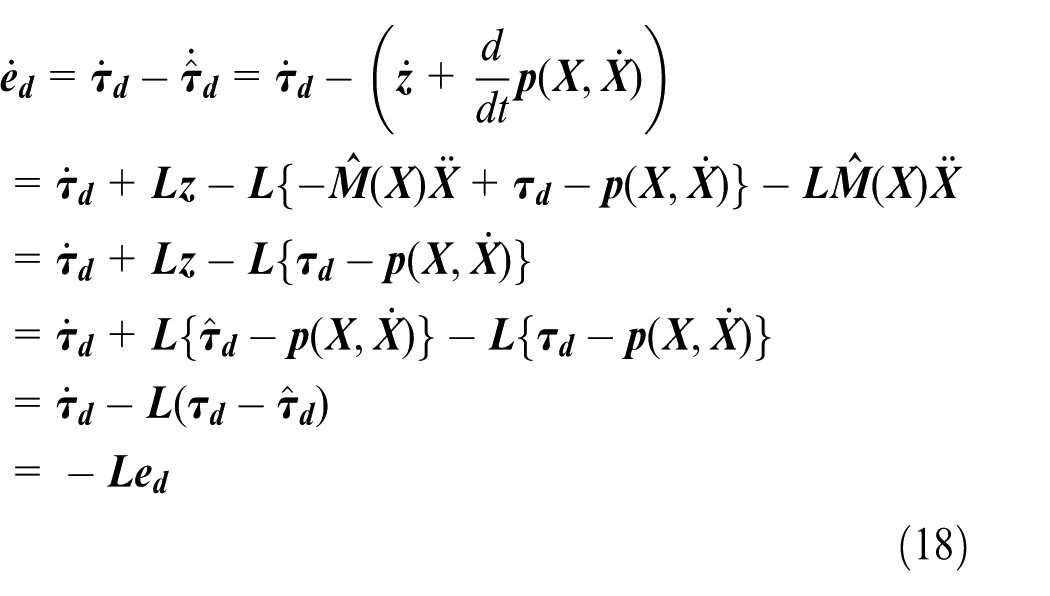
From equation (18), it is seen that the nonlinear disturbance observer can estimate
Composite control law design
In order to design the NDO-based SMC, first we consider the sliding mode surface as follows

where
According to the properties of the parallel mechanism, the power reaching law is used in this article

where
Then the NDO-based SMC control law can be defined as

Stability analysis
Proposition 1. Assume that the rate of change of the disturbance is bounded. Consider the hybrid mechanism equation (8) with an NDO-based SMC controller equation (21). Then, the system-tracking error and disturbance approximation error converge to zero.
Proof
Considering the Lyapunov function candidate V as

Taking the time derivative of V and combing equation (19), according to equations (8), (17), and (21), it yields



Therefore, from equations (24) and (25), assume
Numerical simulations
In this section, numerical simulation results are presented and discussed to demonstrate the effectiveness of the proposed control scheme, and performance of the automobile electro-coating conveying mechanism is analyzed by Simulink. A real working condition is considered for the simulation analysis. Table 1 shows the prototype parameters. The total internal disturbances can be computed by

Parameters for the conveying mechanism.

The parameters for frictions in the simulation are given by

The parameters for external disturbances in the simulation are given by

The uncertainties of system parameters are assumed to be 10% accurate in comparison with their actual values.
According to the requirements of electrophoretic coating process, the car body needs to be rotated 360° in the electrophoresis tank and perform vertical lifting movement to eliminate the roof air bag. The reference trajectory of the mechanism in task space is represented by the following equations

The effectiveness of the control scheme is validated by a given reference trajectory simulation in the presence of internal disturbances, external disturbances, and system uncertainties. Three different control schemes are used in the simulation: CTC, SMC, and the proposed NDO-based SMC. The parameters of these control schemes are chosen based on the simulation performance. The parameters are given as follows:
CTC

SMC

NDO-based SMC

The simulation results for three different control schemes are shown in Figures 3–9. Figures 3 and 4 present the time histories of the position tracking for the conveying mechanism in task space. Figures 5 and 6 present the time histories of the position-tracking error for the conveying mechanism in task space. It can be observed from Figures 3–6 that in the presence of NDO, the hybrid mechanism has the smallest tracking error and the best tracking performance compared to other controllers. Since the conveying mechanism is symmetrical, only results of the first slider, second slider, and active wheel are present here. The time histories of first slider, second slider, and active wheel position-tracking errors are shown in Figures 7–9. It can be seen that in the presence of NDO, the response of each link is fairly smooth, and the tracking error of each link is relatively small, while the response is as fast as in the case of without NDO.

Position tracking in Z direction.

Position tracking in β direction.
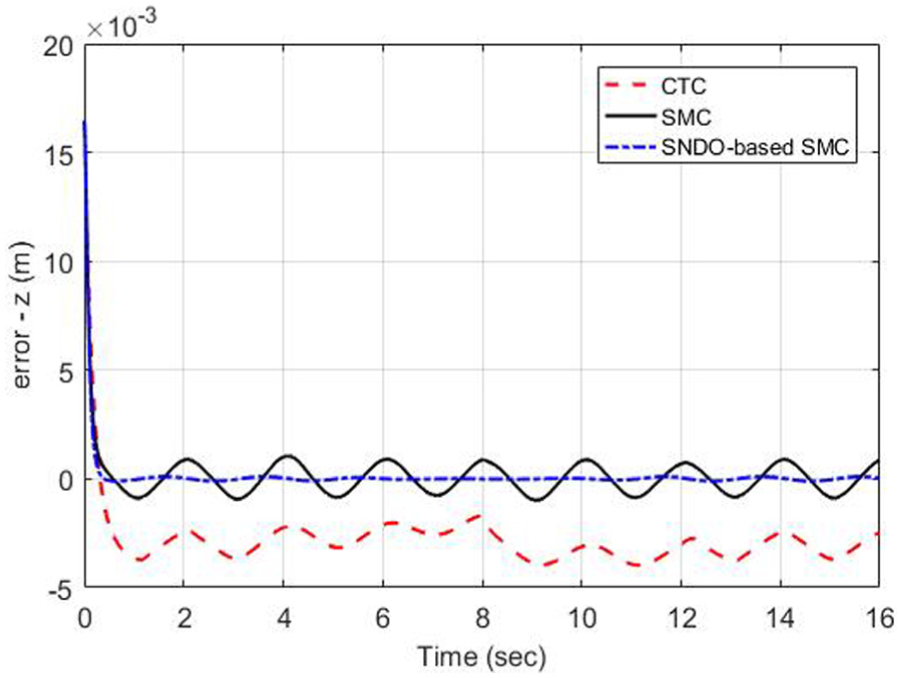
Position tracking error in Z direction.

Position tracking error in β direction.
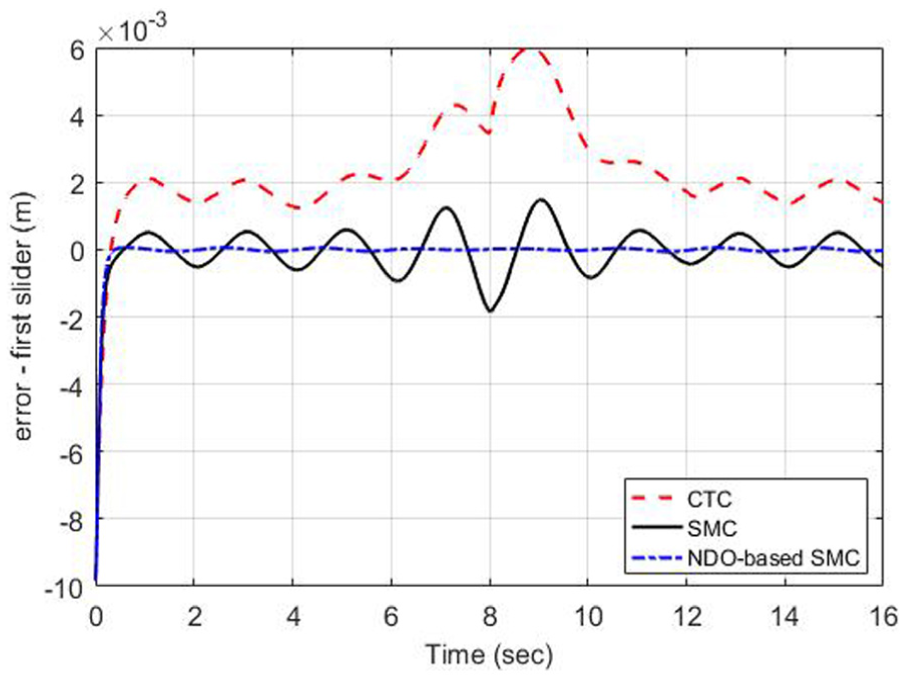
Position tracking error of the first slider.
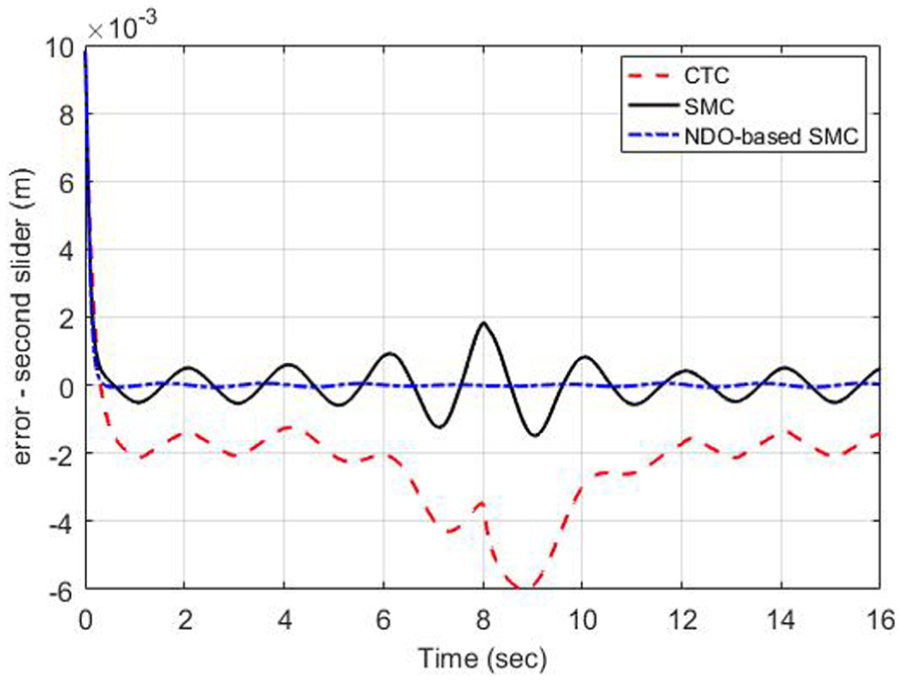
Position tracking error of the second slider.

Position tracking error of the active wheel.
In addition, the proposed disturbance observer performance is also investigated, and its results are presented. The time histories of the estimated disturbances such as frictions, external disturbances, and system uncertainties along with actual disturbances are presented in Figures 10–12. From the results, it is noted that the proposed NDO can estimate disturbances successfully, but the NDO proposed by Mohammadi et al. 22 cannot track the actual disturbances. The proposed NDO for hybrid mechanism has a better disturbance-tracking performance than that proposed by Mohammadi et al.
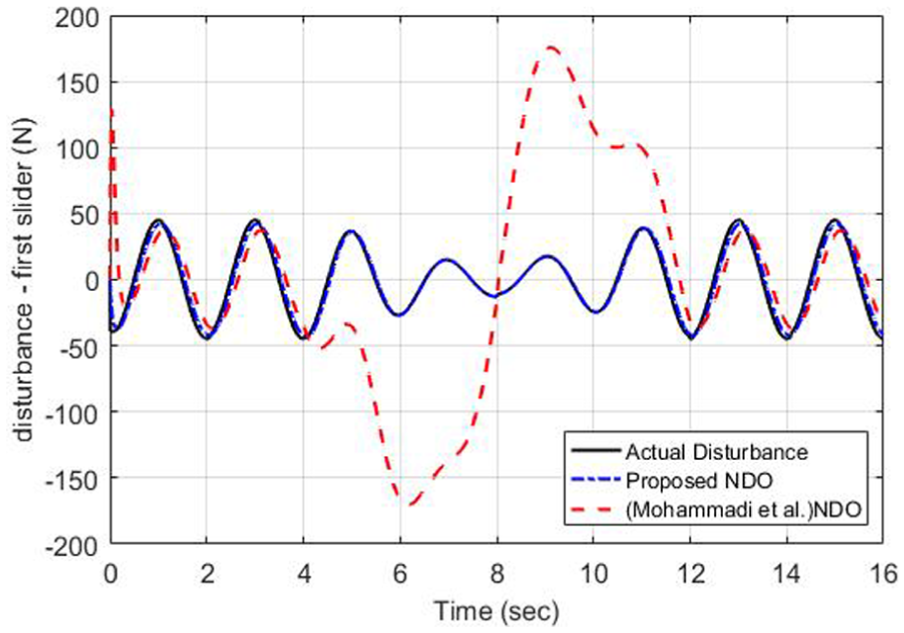
Disturbance tracking of the first slider.

Disturbance tracking of the second slider.

Disturbance tracking of the active wheel.
Figures 13–15 show the time histories of each joint control force according to SMC and NDO-based SMC schemes. It clearly indicates that the proposed control scheme has the relatively smaller chattering phenomenon by choosing a small switching gain, the control force of each joint is less vibrating, and the control activity is reduced. Following the above analysis and simulation results, the proposed control scheme presents the best control performance among the other two algorithms due to combination with NDO, which verifies the effectiveness of the proposed control scheme.
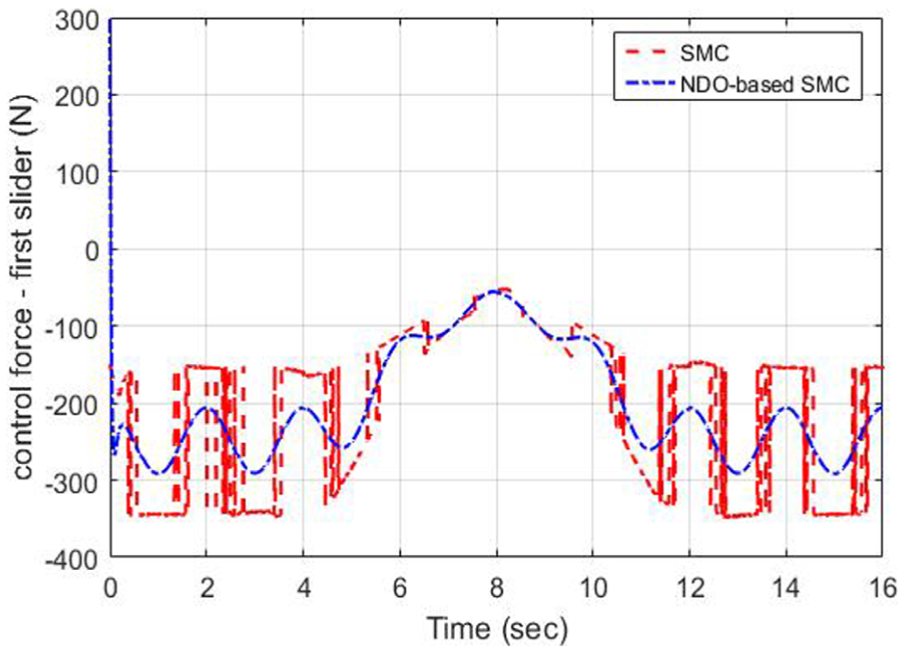
Control force for the first slider.

Control force for the second slider.

Control force for the active wheel.
Generally, the proposed control scheme achieves excellent tracking performance, and it is very effective and efficient in trajectory-tracking task of the hybrid series–parallel mechanism in the presence of internal and external disturbances.
Conclusion
In this article, an NDO with a novel gain matrix for hybrid series–parallel mechanism is proposed. Then, an NDO-based SMC control scheme is proposed to address the joint space–tracking problem of the automobile electro-coating conveying mechanism. The main objective of the proposed control scheme is to improve the trajectory capabilities and robustness in the presence of internal disturbances (such as unmodeled dynamics, parameter variations, and frictions) and unknown external disturbances. The proposed control scheme can be used for accurate positioning and tracking of parallel or series–parallel mechanisms. The effectiveness of the control scheme is validated through comparing simulations results with other two different traditional control schemes. The results indicate that the proposed control law alleviates chattering problem and improves the trajectory-tracking performance.
Footnotes
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was financially supported by the National Natural Science Foundation of China (grants no.: 51375210 and 61503162), the Blue Project of Jiangsu Province, and the Natural Science Foundation for Colleges and Universities in Jiangsu Province (grant no.: 15KJB 510006).