
Abstract
Unmanned surface vehicle has the properties such as complexity, nonlinearity, time variability, and uncertainty, which lead to the difficulty of obtaining a precise kinematics model. A neural adaptive sliding mode controller for the unmanned surface vehicle steering system is developed based on the sliding mode control technique and the radial basis function neural network. In the new approach, two parallel radial basis function neural networks are used to reduce the influence of the system uncertainties and eliminate the dependency of the controller on the precise kinematics model of the system. Among these two radial basis function neural networks, one is used to approximate the unknown nonlinear yaw dynamics and the other is used to adjust the control gain as well as realize the variable gain sliding mode control. The weights of the two neural networks are trained online using the sliding surface variable and the control, where the Lyapunov method is used to derive the adaptive laws to ensure the stability of the whole closed-loop system. The proposed adaptive controller is suitable for the steering control at different cruising speeds with bounded external disturbances. The simulation results show that the proposed controller has a good control performance regarding the smooth control, fast response, and high accuracy.
Keywords
Introduction
Unmanned surface vehicles (USVs) attract the attention of many countries and become a hot research spot in the field of marine equipment because of its low labor cost and strong maneuverability. In the future, USVs will play a vital role in anti-submarine warfare, mine countermeasures, environmental detection, water sampling, personnel search and rescue in the ocean, and so on. 1 As an intelligent surface body of autonomous navigation, an efficient steering system is an important issue. With the change of the parameters such as cruising speed, water depth, and ship loading, the hull of the wet area and drag characteristics will change significantly. This will lead to a change in various hydrodynamic coefficients of the USV model. As a result, the model of the USV is a time-varying system with parameter uncertainty. In addition, the disturbance of wind, wave, and current leads to a more complex control problem. 2 It is a challenge to design an effective adaptive controller with a strong robustness and anti-interference capability which is able to avoid excessive rudder motion for the nonlinear, time-varying, and uncertain USV. 3
A lot of research has been done on the steering system of the USV. Several control methods have been developed for USV steering problem such as classic proportional–integral–derivative (PID) controllers, adaptive controllers, robust controllers, and intelligent controllers. 4 PID controller is a conventional and common controller for feedback control systems, and it greatly improves the performance of the steering system. However, the performance of the control system is affected by the change in the parameters of the system. 5 When the parameters of the system are variable or uncertain, the mathematical model of the plant should be identified to achieve better performance. The identification will increase the complexity and reduce the reliability of the control system.
By taking the uncertainty into account for robust ship control performance, adaptive and robust controllers have been proposed for the USV steering system. 5 System identification technology and extended Kalman filter were integrated to design a steering controller of the vessel associated with unstructured uncertainties by Perera et al. 6 The reduced-order model of the vessel steering can be successfully identified with the required states and parameters. Based on the theory of model reference adaptive systems (MRAS), an adaptive steering controller with input constraints was proposed by Kahveci and Ioannou. 7 The adaptive law was combined with a control design including a linear quadratic (LQ) controller and a Riccati-based anti-windup compensator. In order to reduce the roll motion of surface ships, a robust fin controller based on L2 gain design was proposed by Hinostroza et al. 8 Considering the state constraints in the presence of environmental disturbances, a disturbance compensating model predictive control (MPC) algorithm was applied to solve the ship heading control problem by Li and Sun. 9 The simulation results show the good performance of the proposed controller in terms of reducing heading error and satisfying yaw velocity and actuator saturation constraints. A multivariable controller for the USV with two fixed thrusters was proposed by Park et al. 10 It used system identification technique to estimate the dynamic model of the USV. A controller for a ship steering system with uncertain time delays was designed by Lei and Guo. 11 An extended state observer with the aid of a modified Smith predictor was constructed to estimate the total disturbances including the internal and the external disturbances.
The aforementioned adaptive controllers improved the robustness of the system, where a linear or partially linear model was adopted to describe the ship steering characteristics. However, in fact, the ship steering system is nonlinear and time-varying. 12 As the ship steering has nonlinear manipulation characteristics and uncertainties, intelligent control algorithms combined with other advanced control methods are also used in steering system. 12 A novel adaptive robust online constructive fuzzy control scheme for tracking surface vehicles was proposed by Wang et al. 13 It employed an online constructive fuzzy approximator to deal with uncertainties and unknown disturbances. A model reference adaptive fuzzy control algorithm was applied in the steering control system of the ship by Yang et al. 14 The external disturbances are supposed to be bounded. A performance constrained fuzzy controller design was investigated for the nonlinear uncertain discrete-time ship steering system with complex noises by Chang et al. 15 The nonlinear discrete-time ship steering system was represented by a discrete-time fuzzy model with perturbations, additional noise, and multiplicative noise. Fuzzy autopilot significantly enhances the performance in a noisy environment with fewer rudder motions. However, the tuning of the fuzzy controller parameters is based on an extended trial and error procedure. 16 The neural networks (NNs) are also used to approximate the nonlinearities of the ship steering dynamics and combined with other control technology to produce adaptive controllers.17–21 A NN combined with a barrier Lyapunov function was used to approximate the system uncertainties and prevent states from violating the constraints. 22 NN combined with the L2 gain theory was applied to the autopilot design of ship course-keeping with uncertain modeling errors and disturbances by Luo et al. 23 The NN is used to compensate the modeling errors, and the L2 gain is designed to suppress the uncertain external disturbances. The designed controller has strong robustness. A NN PID controller was designed to bring a better performance on the ship steering hydraulic system, 24 where the gradient descent algorithm is used to find the local optimal solution. Backstepping is a recursive design methodology in a systematic manner which is widely applied in the autopilot of the marine vehicles.25,26 Adaptive robust controllers designed on the basis of backstepping method have the good adaptive ability and tracking performance.27–29 However, backstepping algorithm suffers from the problem of “explosion of terms” because it requires repeated differentiation of the virtual control function, which results in the computation complexity of the actual control law.
Sliding mode controller (SMC) has the outstanding advantages in robustness, anti-disturbance, and response speed.
30
It is also used in the autopilot design of USV.31–33 An adaptive sliding mode control algorithm and nonlinear disturbance observer method were developed for course-keeping maneuvers in vessel steering by Liu.
31
It provides a robust performance against the environmental disturbance and the uncertainty in the rudder dynamics. To select a proper course controller, the proportional–derivative (PD), sliding mode, and fuzzy controllers were tested for three different changes in the course ranging from
In order to reduce the chattering of the SMC and increase the robustness of the system, second-order SMC has been studied in recent years.35–38 More flexible sliding surface variables can be selected, and the chattering is reduced effectively in these methods. However, when the mathematical model of the plant is uncertain, the control performance is affected. The NN which can effectively solve the problems with regard to unknown nonlinear systems attracts many concerns from many researchers.17–24,39–42 Using the universal approximation property of the NNs, the influence of the external disturbance and uncertainty can be reduced, and the controller becomes independent of the precise system model information. 39 The neural adaptive SMCs are designed to improve the robustness of the system and reduce the system chattering.40–42
In order to develop an efficient steering system for the nonlinear course control problem of USV with parameter uncertainties and external disturbances, a neural adaptive SMC based on radial basis function (RBF) NN is designed in this article. RBF NN has good generalization ability. It has the advantages of simple structure, avoiding unnecessary and redundant computation.43,44 The research on RBF NN shows that it can approximate any nonlinear function in a compact set with arbitrary precision.45,46 Therefore, RBF NN is chosen to design the adaptive controller. The weights of the NNs are derived using Lyapunov method to guarantee the stability of the whole closed-loop system. Using the saturation function instead of the sign function in the corrective control, the system chattering is eliminated.
The nonlinear and uncertain term of the USV’s kinematic model is approximated by the RBF NN to reduce the reliance of equivalent control on the accurate kinematics model of the system. The estimated value is used to calculate the equivalent control instead of using the actual value. In this way, the equivalent control can be calculated without the knowledge of the complete dynamics of the USV. The reliance of the equivalent control on the complete kinematic model is reduced, and the influence of the system uncertainties is reduced as well. In addition, the designed controller adopts a variable gain achieved through the RBF NN. It is adjusted dynamically using the system error and the control. The variable gain has two contributions. (1) The control gain is related to the system parameters which are difficult to be acquired. They change with the ship’s navigational states and external environment. The variable gain reduces the reliance on the system parameters and the influence of the system uncertainties is reduced as well. (2) To eliminate the system chattering, the saturation function is used in the corrective control instead of the sign function. It comes at a cost of the system’s robustness. The variable gain brings the variable boundary which shrinks with the convergence of the system states. It enhances the robustness of the system and accelerates the response speed of the system.
The remainder of this article is arranged as follows. In section “Problem formulation,” a brief description of the kinematics model of USV is proposed. In section “Controller design and stability analysis,” the design of the controller and the stability analysis is discussed. Simulations and analyses of the proposed control system and the conventional SMC are shown in section “Simulation studies.” In the last section, the article is concluded.
Problem formulation
In essence, the dynamic characteristics of USVs are nonlinear and uncertain. The nonlinearity of the steering system comes from the nonlinear characteristics of the fluid force while the uncertainties come from the changes in the cruising speed and the external environment. On the basis of the linear second-order K-T equation, 47 considering the external disturbances of wind, wave, and current, the nonlinear response equation of the USV can be described as

where

where
For the sake of writing conveniently, equation (1) can be rewritten as

where
Controller design and stability analysis
SMC design
The task is to design a feedback control

Define the output error as the heading tracking error

According to conventional sliding mode control theory,39,49 the sliding surface variable can be defined as

where

The time derivative of

The derivative of the sliding surface variable is derived using equations (3)–(6)

The control

where

Selecting the corrective control

where

Hence, the control

Suppose that the disturbance is bounded, with

Let the parameter

Therefore, the sliding surface variable

where

where
Neural adaptive SMC design
The conventional SMC for the steering system of USV is designed in the previous section. It can be seen from equation (14) that

The block diagram of the control system.
Suppose that RBF NN1 has


where


where

The approximation error of

where

The error between

where

Equation (27) shows that the control

where

where

The time derivative of
To ensure the stability of the system, the appropriate control law and parameters are selected to make

The parameter

From equation (33), we can see, the closed-loop system is asymptotically stable, if
The same as the traditional SMC, the control

Comparing the control
Simulation studies
In this section, the proposed adaptive neural SMC is applied to the autopilot of USV first. A comparison study of the conventional SMC and the proposed neural sliding mode controller (NSMC) is presented to show the efficiency of the proposed method. The USV is given as DH-01, which is 110 cm long, 36 cm wide, and 5.4 kg weight. Its maximum power is 36 W. Assuming that the cruise speed is 7 knots, the model parameters study by Peng et al.
48
are as follows:
Parameters of the two controllers.

NN: neural network; SMC: sliding mode controller; NSMC: neural sliding mode controller.
Assuming that the parameters of the system are constant and there is no disturbance. The simulation results are provided in Figures 2–9. Figures 2 and 3 depict the output responses of the steering system with NSMC and SMC. It can be observed from Figure 2 that both of the two controllers have good following characteristics. The adjustment time of each system is less than 1 s. The proposed NSMC can achieve a faster response speed than SMC without knowing the precise kinematic model of the system. Figure 3 depicts the speed tracking of the two controllers. Figures 4 and 5 depict the tracking errors of the two controllers, from which we can see that if the system model and parameters are certain and there is no external interference, both controllers can achieve the tracking error of the system converge quickly. Figure 6 depicts the controls of the two controllers, respectively. They are smooth in the extreme. Because the sign function in the corrective control is replaced by saturation function. Figure 7 depicts the sliding surface variables of the two controllers. They converge quickly. Figure 8 depicts the nonlinear

The curves of the output

The curves of the output

The tracking error of

The tracking error of
The control without disturbance.

The sliding surface variable without disturbance.

The variable gain without disturbance.
During the actual navigation, the cruise speed constantly changes and the disturbance of the external environment is inevitable. Suppose the cruise speed changes from 7 to 5 knots at 10 s. The hydrodynamic coefficients of the ship change with the cruise speed. When

The curves of the output

The curves of the output

The tracking error of

The tracking error of

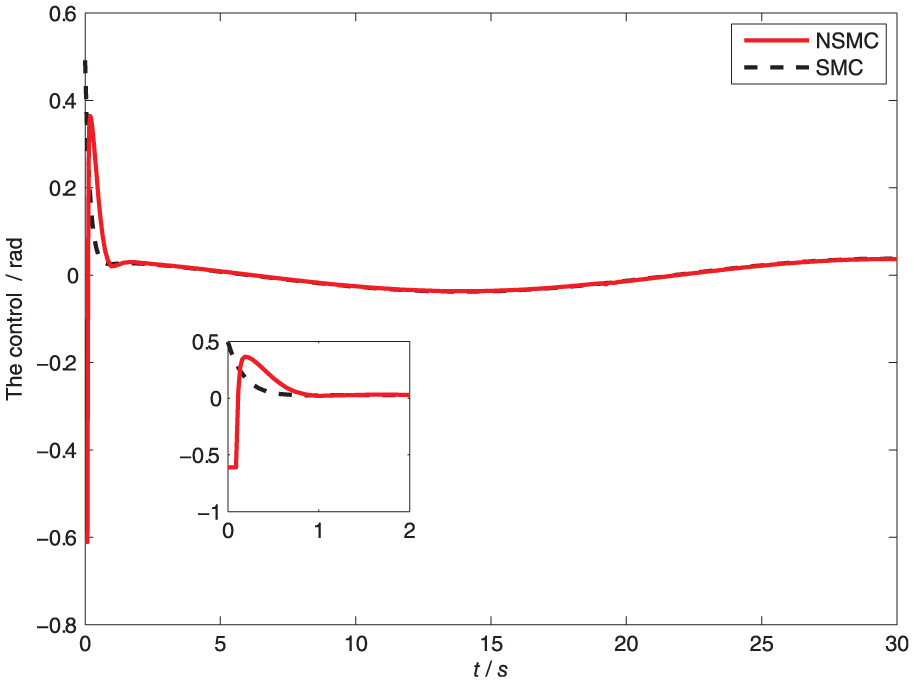
The control with disturbance.
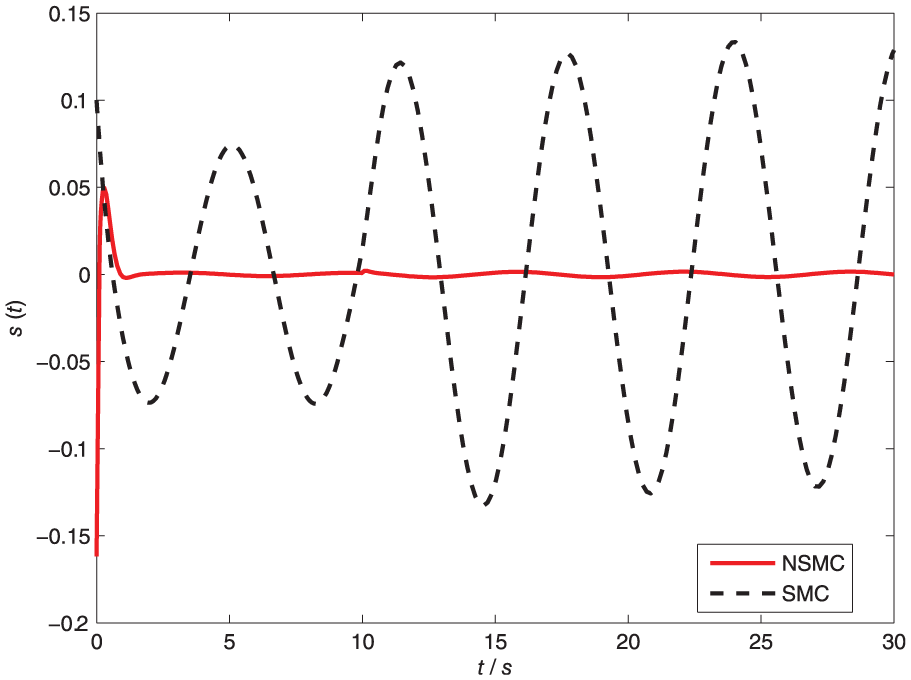
The sliding surface variable with disturbance.


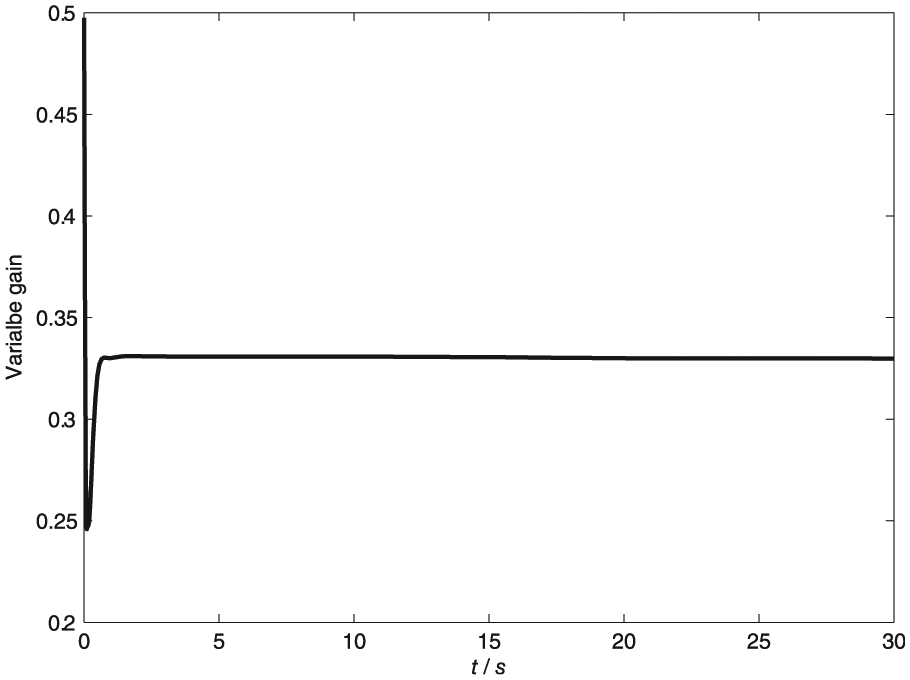
The variable gain with disturbance.
Figures 10 and 11 depict the output responses of the steering system. It can be observed that the SMC cannot track the input very well in presence of external disturbance, while the system with NSMC is almost unaffected. It has good tracking characteristics even in presence of external disturbance and parameters change. The adjustment time of the system with NSMC is less than 1 s. Figure 12 depicts the tracking errors of the two controllers. It can be seen that, if there is an external disturbance, the tracking error of SMC oscillates around zero. It is larger than the tracking error of NSMC, and it increases at 10 s as the USV speed reduces. It is easily affected by the external disturbance and parameters change because the sign function in the corrective control is replaced by saturation function to eliminate system chattering. The simulation results are consistent with the theoretical analysis in the previous section. However, the tracking error of NSMC is almost unaffected by the external disturbance and parameters change. Figure 13 depicts the tracking errors of
Conclusion
This article presents an autopilot design method for USV steering system with parameter uncertainty and bounded disturbance. The nonlinear and uncertain part of the system is approximated using RBF NNs while a variable gain sliding mode control strategy is realized to reduce the influence of the system uncertainties and accelerate the system response. The saturation function is applied instead of a sign function to eliminate the system chattering. Simulation results show that the designed controller has an efficient performance in adaptability and course tracking. Compared to traditional SMC, the proposed controller is designed without knowing the precise kinematic model of the system. In addition, the robustness and tracking accuracy of the system is improved under the premise of eliminating the system chattering. The ongoing work is extending the proposed method to other ocean delivery systems.
Footnotes
Handling Editor: Guang Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.