
Abstract
This article investigates the spacecraft attitude reorientation control problem in the presence of attitude constraint, actuator saturation, parametric uncertainty, and external disturbance. First, a nonlinear tracking law based on a strictly convex potential function is proposed to generate the virtual control angular velocity which has only one global minimum. Then, utilizing the auxiliary system governed by the difference between the upper bound of actuator torque and the untreated command torque, a novel backstepping controller is presented, which is able to satisfy the constraint of actuator saturation and guarantee the stability of control system. In addition, an extended state observer with the uniformly ultimately bounded estimation error and finite-time stability is put forward to realize the real-time compensation of the compound disturbance consisting of parametric uncertainty and external disturbance. Therefore, it enhances the robustness and improves the accuracy of the extended state observer–based backstepping controller. Finally, simulation results validate the effectiveness and reliability of the proposed schemes.
Introduction
During the large angle reorientation maneuver of spacecraft, there exist many constraints caused by flight tasks, on-board sensors, practical actuators, and payloads. For example, optical devices cannot be exposed to strong light sources, and the solar array needs to catch the sunlight. Thus, the attitude should be maintained in the admissible zone which consists of keep-out and keep-in zones. In recent years, considerable research attentions have been attracted to attitude planning and control with constrained attitude zones, and the literature is divided into two research directions.
One direction is planing-and-tracking. The analytic solution of the optimal control problem of the geometric algorithm has been proposed by Biggs and Colley. 1 However, the local minima need to be avoided by careful parameter selection. For some special types of constraints, the constraint monitor method has been proposed by Singh et al. 2 and applied to the Cassini spacecraft. Some image search algorithms have been introduced for attitude maneuver control. Such as the A* path planning method3,4 the distortion-minimizing attitude parameterizations5,6 and the random search tree method 7 with a smaller computational complexity. Based on the previous literature, 8 the pseudo-spectral method 9 has been used to generate the paths without any constraint violations between local nodes, which has achieved a better performance. Melton10,11 has proposed a hybrid algorithm consisting of particle swarm optimization, differential evolution, and bacterial foraging optimization methods to determine the initial guess, which plays a important role in the convergence property of the pseudo-spectral method. The particle swarm algorithm 12 has also been introduced in the maneuver path planning. However, more practical constraints need to be considered.
The other direction is embedding attitude constraints in the controller. Kim and colleagues8,13 have proposed a semi-definite planning method, which has a drawback of large computational complexity. Inspired by Kim and Mesbahi, 8 Cui et al. 14 have applied the receding-horizon-control to the design of controller. They obtained a better performance of obstacle avoidance due to its multistep prediction technology. The non-convex constraint set has been modified as a convex one by Tam and Lightsey. 15 On this basis, a navigation system has been carried out. However, its performance index depends on the selection of the weighting factors, which is a major shortcoming. Sun and Dai 16 have presented the quadratically constrained quadratic programming for the original optimization problem which can drive solution converge to the optimum.
Considering the computational complexity, the potential-function-based controller is smaller than the above algorithms. The reorientation maneuver task in the presence of attitude constraint, which is caused by optical equipment’s requirement of avoidance to bright celestial bodies, and described by the Euler angle, the quaternion, and the Rodrigues parameters,17–19 has been studied. Avanzini et al. 20 have proposed a potential-function-based backstepping controller. Furthermore, the existence conditions for the repulsive potential function (RPF) have been presented by Guo et al., 21 and the external disturbance has been considered by Zheng et al. 22 To achieve a better performance of convergence time and accuracy, Mengali and Quarta 23 have designed a variable gain controller. To deal with the local minima in potential functions, Lee and Mesbahi 24 have demonstrated that a logarithmic barrier potential function with respect to attitude quaternion is strictly convex such that it has only one global minimum.
For the practical spacecraft missions, there exist some other constraints. To deal with the actuator saturation and partial loss of control effectiveness, an uniformly ultimately bounded controller has been presented by Xiao et al. 25 The external disturbance and parametric uncertainty have been attenuated, and the actuator saturation has been guaranteed by a sliding-mode-observer-based adaptive controller proposed by Xiao and Yin. 26 To improve the convergence property, Xiao et al. 27 have carried out an observer-based estimation law to completely eliminate the unwanted uncertain dynamics. Thus, the attitude tracking system is asymptotically stable with the controller consisting of the estimation-law-based proportional–derivative-type controller.
Thereupon, this article applies a strictly convex potential function as the navigation function to guarantee that the attitude reaches the target in absence of any constraint violation. Moreover, taking advantage of the auxiliary system governed by the difference between untreated command torque and the upper bound of control torque, the proposed novel backstepping controller is able to be stable with unknown actuator saturation and obtain better universality and reliability. In traditional methods, the external disturbance and parametric uncertainty need to be stabilized by the inherent characteristic of the controller, which causes the loss of control accuracy. Therefore, this article presents an extended state observer (ESO) to realize real-time compensation of the compound disturbance consisting of external disturbance and parametric uncertainty, which is able to enhance the robustness of the control system.
The rest of this article is organized as follows. In section “Problem formulation,” the spacecraft modeling, the description of the attitude-constrained zones, the potential function, the lemmas, and problem statement are presented. Section “Attitude controller design” gives the detailed derivations of attitude controllers. The ESO is designed in section “ESO-based controller design.” To prove the effectiveness and reliability of the proposed controllers, some numerical simulations are carried out in section “Simulation results and discussions” and followed by the conclusion in section “Conclusion.”
Problem formulation
Attitude kinematics and dynamics
Spacecraft attitude kinematics and dynamics equations with actuator saturation and compound disturbance can be written as follows


where

where

Assumption 1
The external stochastic disturbance

where
The command attitude quaternion which depends on the attitude maneuver task is denoted by

where
Assumption 2
In the attitude reorientation task investigated by this article,
Attitude-constrained zones description
Suppose the unit vector

Optical axis
Assumption 3
In the attitude reorientation task researched by this article, the direction vector
Thereupon, we have

where

where

where

where
Keep-out zone
Consider the attitude

where

2. Keep-in zone
Being similar to the definition of keep-out zone, keep-in zone represents the attitudes which are guaranteed that the angle between

where
3. Admissible zone
When the satellite carries different kinds of instruments, and some instruments need to be kept in

During the reorientation maneuvering, the attitude quaternion
Potential function design
The attractive potential function

where
Remark 1
Utilizing the term
Assumption 4
The initial attitude quaternion
The RPF

Evidently,

where
Until now, we can construct a logarithmic barrier potential function

Lemmas
Lemma 1
The potential function
Lemma 2
If a continuous positive definite function

where

Problem statement
In this article, spacecraft reorientation task in the presence of attitude constraint is addressed. Under Assumptions 1–3, the control objective herein is to design a controller to drive the system state
Attitude controller design
Design of backstepping controller based on nonlinear tracking law
During the design of the controller in this section, the actuator saturation and compound disturbance are not considered for the time being.
The time derivative of

In order to reduce the system potential function


where


Thereupon

The state equations that need to be processed can be written as

Introduce new variables

Theorem 1
Consider the system plant in equation (27) with the new variables in equation (28). The equilibrium

where
Proof
Since

where
Taking the time derivative of
Then, substituting controller (equation (29)) into above equation, it is obtained that

Letting
Remark 2
Traditional methods to construct artificial potential function cannot guarantee the strictly convex property, which is easier to lead to local minima in generating virtual angular velocity command. When the system is trapped into local minima, it is necessary to design an anti-loacal-minima control scheme. Taking advantage of the strictly convex potential function, the globally asymptotically stable controller proposed in this article has a better application value.
Remark 3
Introducing the existence conditions for the RPF helps avoid unnecessary detour in the attitude maneuver process.
21
However, because of the complex admissible attitude set
Design of backstepping controller with actuator saturation
In practical engineering applications, the actuators cannot provide infinite energy. If they cannot execute the controller command completely, the spacecraft may be unstable. Consequently, it is necessary to address the actuator saturation constraint.
State equations under actuator saturation are

We construct an auxiliary system

where
Introduce new variables

Theorem 2
Considering the system governed by equation (33) with extended states (35), and the auxiliary system (34), there exist controller gains

Proof
Since

where
The time derivative of

Then, substituting controller (equation (36)) into the equation above, it follows that

It should be noted that if the actuators are always in saturation, the state
ESO-based controller design
The above backstepping controller has not considered the compound disturbance, which consists of external disturbance and parametric uncertainties. Although the controller is asymptotically stable, the robustness is weak. If the compound disturbance is excessively large, the system will be hard to be stabilized. For orbiting spacecraft, the estimation and compensation of the compound disturbance is difficult due to the complex sources, including gravitational perturbation, aerodynamic torque, and other environmental or non-environmental torques. In this section, the ESO will be proposed to enhance the robustness of the system.
The system can be rewritten as

where

where
Based on the finite-time observer in Zou, 31 the ESO is carried out as

where
The observation error

In addition, the dynamics of the observation error

Theorem 3
For the uncertain system (equation (41)) and the ESO (equation (42)), set the initial estimation
Proof
The candidate Lyapunov function is selected as

where

Thus,

where
The time derivative of

where

and
The time derivative of
where

where

Therefore

Considering

When

there exists a constant

Since

it yields

Then, by Lemma 2,

in finite time. Thus, the proof is completed.
Consequently, the ESO-based controllers can be modified based on controller (equations (29) and (36)) as


The system block diagram for the ESO-based controller in this article is shown in Figure 2.

System block diagram for the ESO-based controller.
Theorem 4
Under Assumption 1, the ESO-based controllers (equations (59) and (60)) are uniformly bounded.
Proof
Proof of controller (equation (59)):
Considering equation (40) without actuator saturation, equation (31) can be modified as

Then, substituting controller (equation (59)) into above equation, it will be

According to Theorem 3, there exists a positive constant

Thus, controller (equation (59)) is uniformly bounded.
2. Proof of controller (equation (60)):
Due to Theorem 2, the auxiliary system
Thus, the proof is completed.
Simulation results and discussions
In this section, to illustrate the performance of proposed ESO-based controllers, numerical simulations have been carried out for the attitude reorientation maneuver mission in the presence of attitude constraint, parametric uncertainty, external disturbance, and actuator saturation. The simulation environment is given in Table 1, including parameters of spacecraft, maneuver target, and descriptions of keep-in and keep-out zones.
The simulation parameters.

It is assumed that the maximum angular velocity of spacecraft is

In order to achieve the control object, the parameters of controllers and ESO are chosen as Table 2.
Controller parameters.

ESO: extended state observer.
To illustrate the performance and effectiveness, numerical simulations are realized through MATLAB/Simulink and divided into three cases. All three cases include parametric uncertainty and external disturbance. The differences are shown as follows:
Case 1: Ignore the actuator saturation, that is, utilize the controller (equation (59)).
Case 2: Take into account the constraint of actuator saturation, that is, utilize the controller (equation (60)).
Case 3: Simulate the backstepping controller proposed by Lee and Mesbahi 24 as a comparison.
Figure 3 shows the time response of Case 1, including the zyx-ordered error Euler angles, the control torque
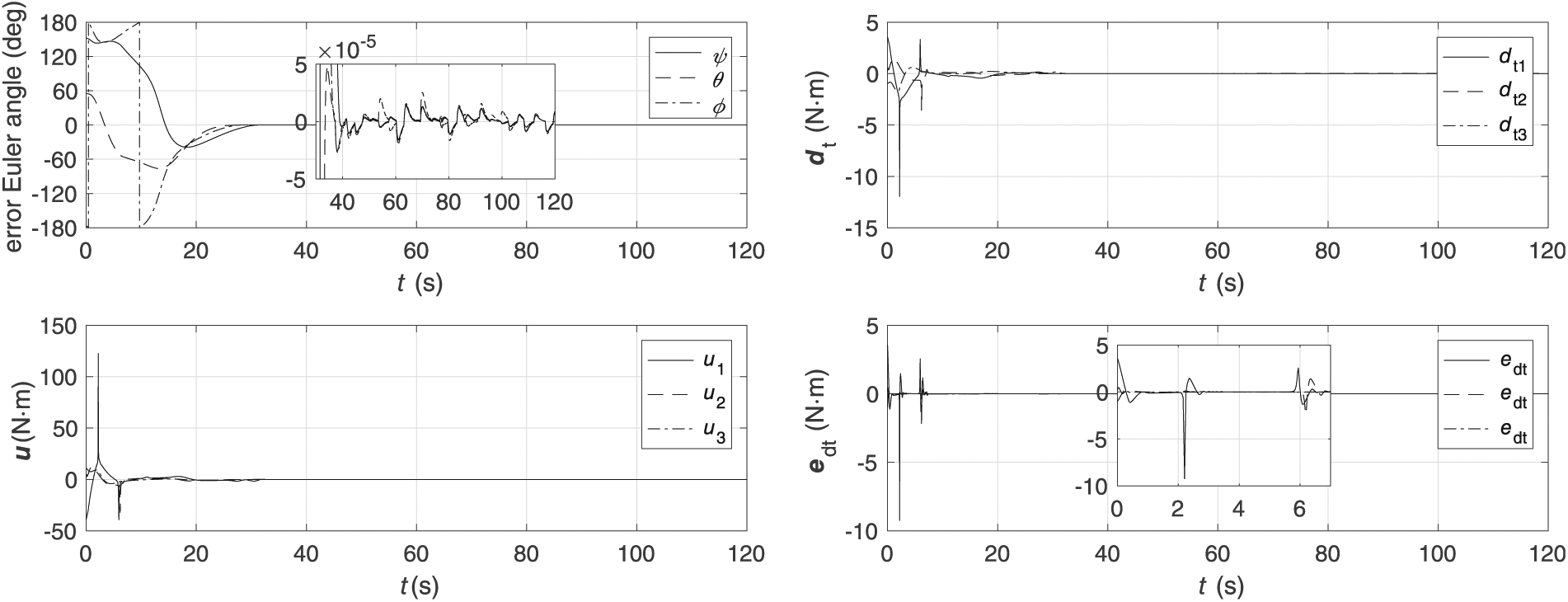
Simulation results of Case 1.
It can be seen from Figure 3 that the error Euler angles fall into the tolerance within

Trajectories of
In order to eliminate this drawback of not being able to deal with actuator saturation, the controller (equation (60)) has been proposed with the same controller parameters. The numerical simulation results are shown in Figure 5, including the zyx-ordered error Euler angles, spacecraft angular velocity

Simulation results of Case 2.
As can be seen from Figure 5, the controller (equation (60)) is able to drive the spacecraft attitude to the target without any constraint violation, which is also illustrated in Figure 6. It is clearly that the command torque maintains in the limitation during the whole maneuver process. Compared with Case 1, the convergence time is extended to

Trajectories of
What is more, by introducing the auxiliary system
Analyzing the time responses of the observation error
To illustrate the effective of the proposed controllers in this article, some comparative simulation using the backstepping controller proposed by Lee and Mesbahi 24 has also been carried out, as shown in Figures 7 and 8. Comparing Figures 5 and 7, the controller proposed in this article has a smaller convergence time and higher attitude accuracy, that is, it is more effective than the traditional algorithm.
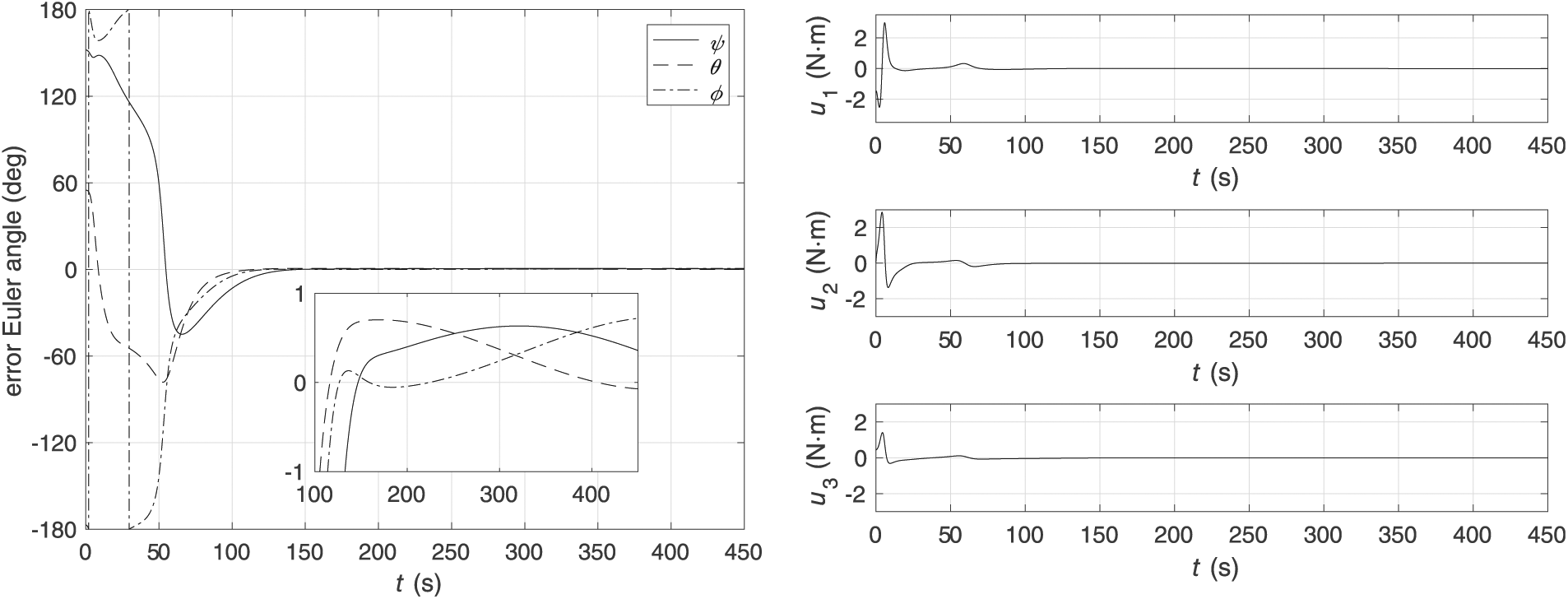
Simulation results of Case 3.

Trajectories of
Conclusion
The spacecraft attitude reorientation task in the presence of attitude constraint, parametric uncertainty, external disturbance, and actuator saturation was investigated. A novel feedback controller was designed based on the potential function, the nonlinear tracking law, and the ESO. First, a strictly convex logarithmic barrier potential function was designed to ensure that the tracking law has one and only one minimum, namely global minimum. To guarantee the stability of the control system under actuator saturation, an auxiliary system was introduced in the backstepping controller. Then, to achieve real-time compensation of the compound disturbance which consists of parametric uncertainty and external disturbance, the ESO was proposed. Therefore, a better robustness of controller was obtained. The stability of all proposed algorithms was proved by Lyapunov method. Finally, the numerical simulations with fine performance illustrated the reliability and effectiveness of the proposed controller.
However, time or fuel optimization problem is not considered in this article, so the follow-up work needs to deal with the optimization problem in the presence of attitude constraint.
Footnotes
Acknowledgements
The authors thank the reviewers and the editor for their useful and constructive suggestions that helped to substantially improve the quality of this article.
Handling Editor: Xiang Yu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (61603115, 91638301, 9143 8202), the Open Fund of National Defense Key Discipline Laboratory of Micro-Spacecraft Technology (HIT.KLOF. MST.201501, HIT.KLOF.MST.201601), the China Postdoc-toral Science Foundation funded project (2015M81455), and the Heilongjiang Postdoctoral Fund (LBH-Z15085).