
Abstract
As a learning mechanism that emulates the structure of the cerebellum, cerebellar model articulation controllers have been widely adopted in the control of robotic systems because of the fast learning ability and simple computational structure. In this article, a cerebellar model articulation controller–based neural network controller is developed for an omnidirectional mobile robot. With the powerful learning ability of cerebellar model articulation controller, a cerebellar model articulation controller neural network is constructed to learn the complex dynamics of the omnidirectional mobile robot such that the robot is controlled without a priori knowledge of the robot dynamics. In addition, to overcome the limitation of the neural network controller, a global control technique with a group of smooth switching functions is designed such that the global ultimately uniformly boundedness of cerebellar model articulation controller is achieved instead of conventional semi-global ultimately uniformly boundedness. Moreover, smooth decreasing boundary functions are synthesized into the controller to guarantee the transient control performance. Based on an omnidirectional mobile robot, numerical experiments have been conducted to demonstrate the effectiveness of the proposed cerebellar model articulation controller controller.
Keywords
Introduction
Over the past decades, the mobile robots’ motion control has received much attention from both academia and industrial communities.1–6 To overcome the nonholonomic constraints of the conventional two-wheeled mobile robots, omnidirectional mobile robots (OMRs) have been successfully developed, for example, steel wheel mobile robots, universal wheel mobile robots, Crawler mechanism, and orthogonal wheel mobile robots.7,8 The omnidirectional mechanism enables the robots to control the rotation and translation of the mobile robot independently with significantly increased flexibility. Thus, the control of OMR has been widely studied by researchers.
An early study of the omnidirectional robot control was presented using the resolved acceleration control in by Watanabe. 7 Based on this work, the potential field-based motion planning controller was proposed to achieve the avoidance of obstacles. 8 Model predictive control (MPC) and sliding mode control have also been investigated to deal with the various unknown nonlinearities.9–13 In the abovementioned works, the OMRs were well controlled with the full knowledge of the robot kinematic and dynamic models. However, in practice, the robot dynamics may not be available due to the modeling errors and environmental uncertainties. For example, the mass and inertia of payloads exerted on the mobile robot cannot always be known in advance, which may cause modeling uncertainties of robot control. This may result in the control performance degradation or even lead to unstable phenomenon when the robot is situated in the unstructured and dynamically changing environments. Therefore, effective modeling methods are required to enhance the control performance.
In the literature, research on bioinspired robot learning and control has received considerable attention since the biological creatures, mechanisms, and the underlying principles are likely to bring novel ideas to improve control performance of the robot in the complex environment.14–17 In 1972, based on a cerebellum neurophysiological model, Albus 14 proposed a learning mechanism that emulates the structure and function of the cerebellum, called cerebellar model articulation controller (CMAC). In comparison to the conventional back-propagation neural networks (NNs), the CMAC is characterized by the properties of rapid learning, simple structure, computational cost efficiency, and readiness for implementation.18–20
Inspired by the learning ability of CMAC, in this article, we develop a CMAC NN–based mobile robot controller without a priori of knowledge of robot dynamics. It has been reported that, by employing “continuous” activation cells like Gaussian functions, the CMAC NN has the ability to approximate any smooth and continuous nonlinear function with the desired precision. Thus, the NN controller has been widely applied in the nonlinear systems.20–29 An NN was presented to control the continuous- and discrete-time robot systems by constructing a novel adaptation law. 20 A recurrent fuzzy wavelet NN was employed to address the unknown dynamics of a mobile manipulator robot. 30 An adaptive NN–based automatic motion control has been developed for the subsystem of a wheeled inverted pendulum in Yang et al., 31 where the NN was employed to model the mobile robot with external uncertainties.
Although the approximation ability of NN has been investigated in the literature, an assumption that the input of NN should remain in a compact set is commonly used. 32 For a CMAC, inputs of the NN are only valid in a compact set defining by the overlap of receptive fields and hence its approximation ability only holds in a compact domain. 32 If the inputs are outside the compact set, the learning ability of CMAC may be no longer valid and would lead to unsatisfactory and even unstable control performance. This compact set is hard to determine in advance, especially for the multiple inputs and multiple outputs system which has a large number of NN inputs. Sanner and Slotine 33 first proposed an approach using a robust controller for driving the escaped transient back to the compact set to realize the global tracking stability, with example applications on simple linearizable systems. This design has been further extended to input–output linearizable systems in Tzirkel-Hancock and Fallside. 34 To improve the robustness of the control performance when the inputs run out of the compact set, in this article, we develop a global CMAC control scheme using a set of sufficiently smooth switching functions, which includes an adaptive CMAC controller and a robust control scheme. In comparison to the conventional CMAC NN control, the proposed method does not require the initial neural inputs to remain in a compact set and can completely turn off the neural controller if the inputs are outside the compact set.
It should also be noted that, during the motion control of mobile robots, the motion constraints should be considered. In Kanjanawanishkul and Zell, 9 a control strategy was designed to handle the input constraints of a mobile robot system using optimization method. Quadratic programming (QP) combined with MPC was proposed to incorporate the constraints into the control designs. 4 In the abovementioned methods, however, the motion constraint control needs to use the robot dynamic model to solve the optimization problem, which may not be available in advance. In this article, we develop a control algorithm for motion constraints of the OMRs inspired by a barrier Lyapunov function (BLF) technique. The BLF can indirectly constrain the system tracking performance by setting the constraint functions to the error signals, which has been reported in the literature.35–37 To ensure both position and velocity tracking performance of the mobile robots, a proper BLF is constructed for the motion constraint control of the OMR such that the enhanced transient performance of motion control can be achieved.
Compared with the previous results, the main contributions of this article are highlighted as follows:
Construction of an adaptive CMAC NN controller for the OMR without using information of the robot dynamics.
Integration of a transient performance function into the proposed control scheme using error transformations and the BLF technique. This guarantees that both the position and velocity states of the OMR can achieve the desired transient performance.
Realization of the global stability of the CMAC NN using a switch mechanism design. In comparison to the conventional NN control, the proposed method does not require the initial neural inputs to remain in a compact set such that the initial condition can be relaxed.
Problem formulation and system description
Problem formulation
In this article, we aim to design an omnidirectional robot controller such that the controller can simultaneously guarantee that (1) the position states and velocity states of the mobile robot do not violate prescribed bounds and (2) all system states remain globally uniformly ultimately bounded (GUUB) without using the knowledge of the robot dynamics.
System description
The structure of the omnidirectional wheeled mobile robot is shown in Figure 1. The omnidirectional wheel consists of a wheel and a number of rollers that allow the wheel to moving flexibly in two directions (along with the wheel and along with the roller) in a plane as shown in Figure 2. Consider an OMR moving in the world coordinate frame (WCF), and its kinematic can be given by


The structure of an omnidirectional wheeled mobile robot.
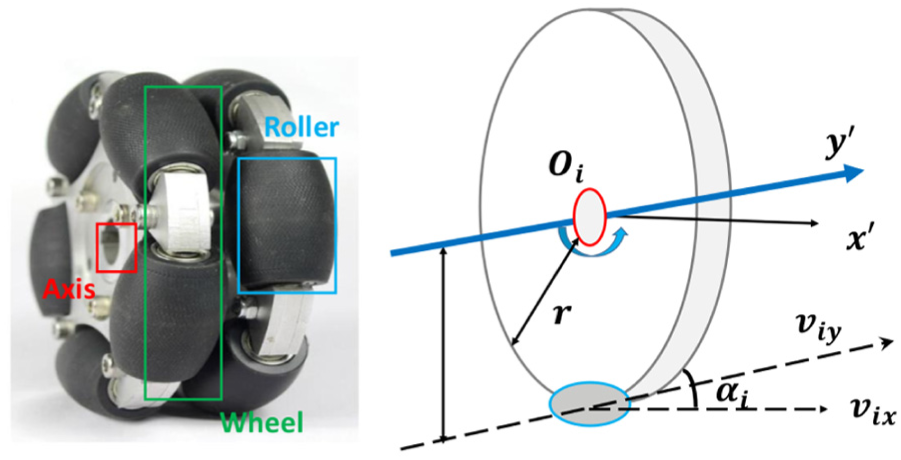
An overlook of the omnidirectional wheel.
where
To enhance the control performance, the robot dynamics is useful since it can be used to deal with the nonlinear and time-varying term in the motor drive system. The mobile robot dynamics can be first defined in a robot moving coordinate frame (RCF) as 8
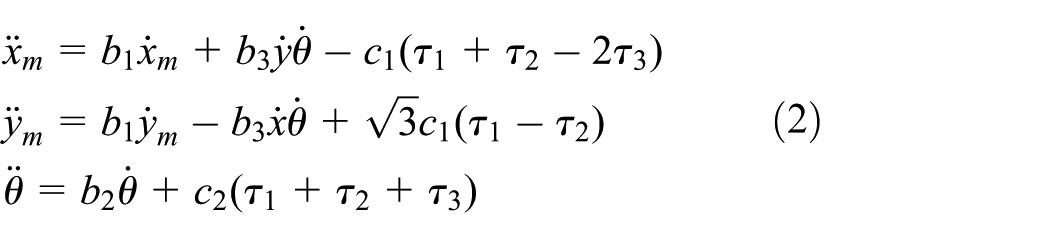
where

where
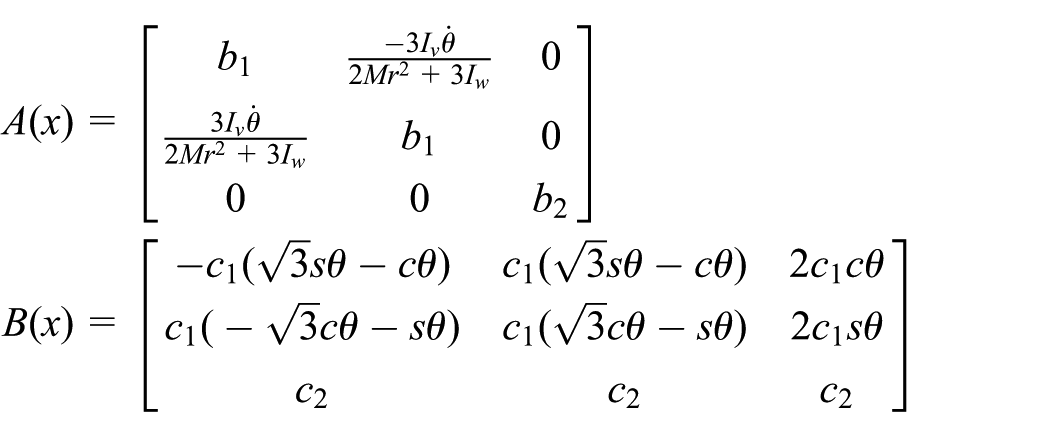
The dynamics of mobile robot in the RCF can be transfered to the WCF through the following rotation transformation matrix

Using equation (3) and the relationship that

where
and
Noted that the matrix

where

where
Assumption 1
During the tracking procedure, the trajectory is well generated and the obstacle is perfectly avoided by the OMR.
Assumption 2
The matrix inverse of
Preliminaries
Figure 3 shows a basic structure of the CMAC NN proposed in Commuri et al.,
20
where the CMAC was designed to control a robot manipulator. In the following, let us briefly review the mathematical description of the CMAC NN. The CMAC can be used to approximate the unknown continuous function,


where


Structure of a CMAC neural network.
and

It should be noted that

where

where
Lemma 1
For a continuous nonlinear function

where
In this article, we will use the CMAC NN to approximate the uncertain dynamics of the OMR.
2. Useful function and key lemma. 38
The following definition and lemma would be used to derive the conclusion.
Definition 1
A smooth switching function

where
The switching function (13) is a smooth nonlinear function with the value field
Lemma 2
For any

with
Lemma 3
For a given positive constant vector

where
Controller design
Before proceeding the control design, let us define the tracking errors of OMR as

where
Specified tracking performance
To guarantee that the tracking error

where
The control objective of OMR is to track the desired position and velocity trajectories specified in the world frame while simultaneously to guarantee that the position tracking errors would not violate the prescribed bounds, that is,
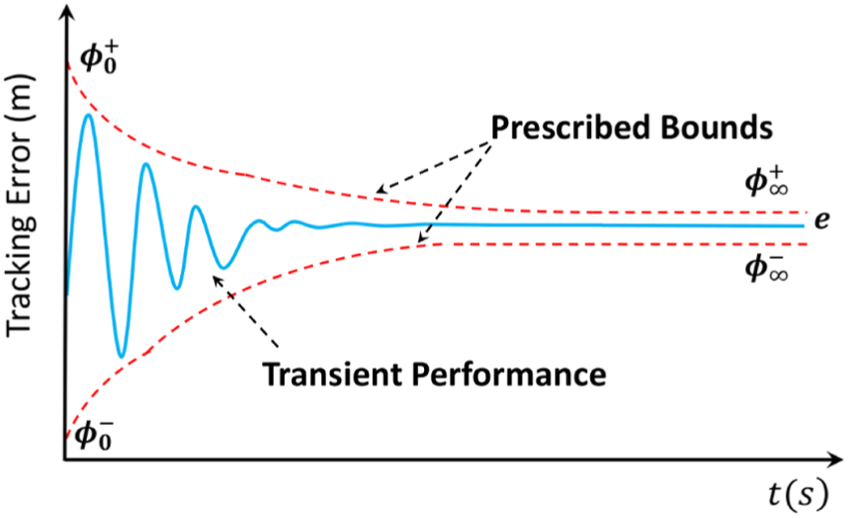
An illustration of the transient performance and prescribed bounds.
Then we have

where
Global CMAC NN controller design
In this section, we aim to develop a CMAC NN–based OMR controller such that the robot tracking can achieve the desired transient performance in the presence of the unknown system dynamics. The controller can be designed in the following two steps:
Step 1: robot transient control.
Inspired by the work of Tee and Li, 35 we construct an asymmetric time-varying barrier Lyapunov candidate as

with

Substituting equations (16) and (18) into equation (21) and in terms of the definitions of
Notice that

Subsequently, the virtual controller can be designed as

where

Then the combination of equations (23)–(25) yields

Let us define

Substituting equation (27) into equation (26) and in terms of equation (18), we can obtain

Then the barrier Lyapunov candidate is defined as follows

The derivative of equation (29) with respect to time yields

Differentiating

Applying the Moore–Penrose inverse of

Notice that in the case of

where

Step 2: global CMAC NN control.
In practice, the robot dynamics

where
It should be noted that the NN approximation capability only holds on the compact set

where

where

where
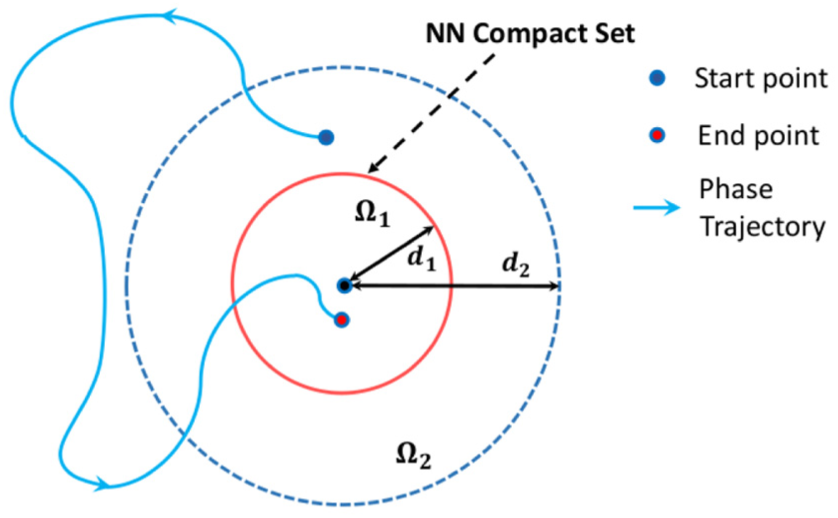
An overview of the global NN control concept. The blue line denotes the phase trajectory of the neural inputs and the blue and red dots denote its starting and end points, respectively. The red circle denotes the compact set of the CMAC input.
Remark 1
As shown in equation (36), the proposed controller consists of a robust controller
Stability analysis
Theorem 1
Consider the mobile robot system in equation (5) and the designed tracking errors (equation (16)), given the initial conditions such that
Proof
Let us consider the following Lyapunov candidate

Taking the time derivate of

Substituting the control law (equation (33)) as well as the NN adaptive law (equation (38)) into equation (40), we can obtain
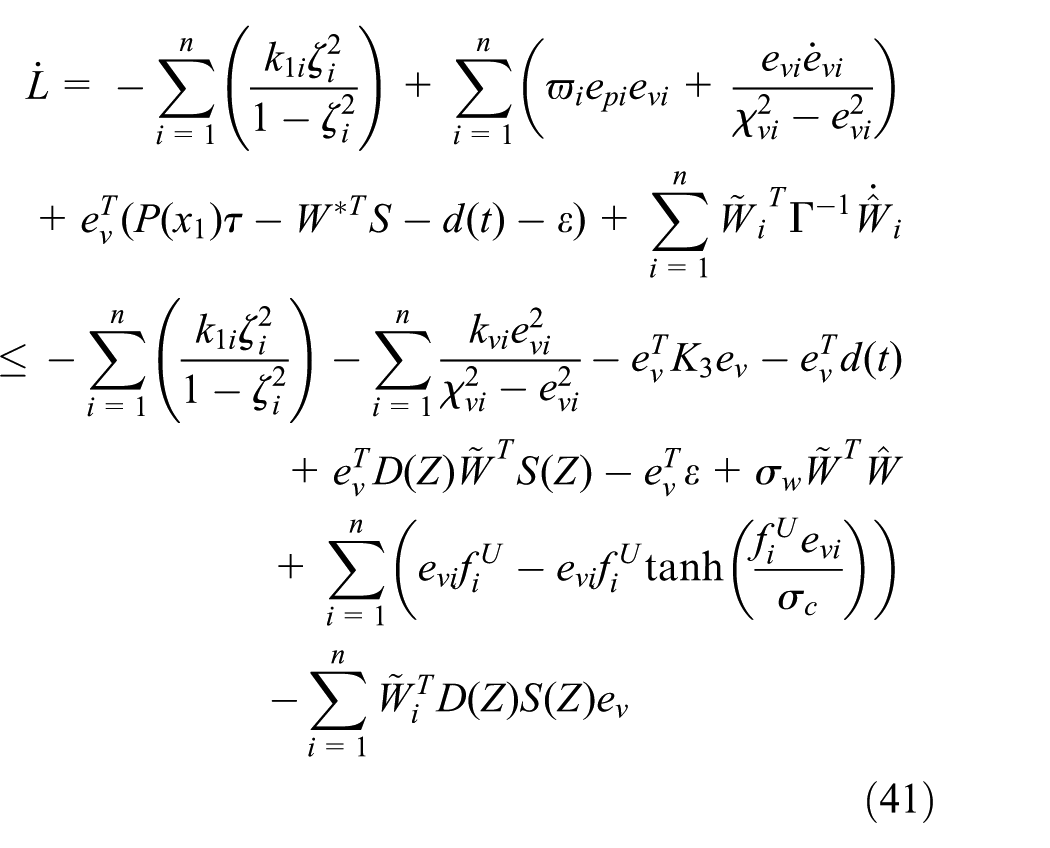
Note that the following inequality holds for any

where
According to Young’s inequality, we have

Substituting the above inequalities into equation (43), we have
Consider the inequality in Lemma 3 and note that the fact
From equation (46) and the definition in equations (20), (29), and (39), we can derive

where
From the above analysis, we can obtain that
Simulation study
To verify the effectiveness of our proposed control scheme, simulations are carried out based on an OMR. The kinematic model and dynamic model are given by equations (1) and (5). The robot modeling parameters are given in Table 1.
Setting the dynamic parameter values of the OMR.

OMR: omnidirectional mobile robot.
In the simulation, two groups of reference trajectories have been considered: (1) setpoint case—the robot is controlled to arrive at a referred location with the desired orientation and (2) path following case—the robot is controlled to follow a reference path.
Setpoint cases
In the setpoint tracking case, the OMR is controlled to achieve a desired position
The initial positions and velocities of the mobile robot are set to be
The simulation results of the setpoint control are shown in Figures 6–10. We can see from Figure 6 that the setpoint has been successfully arrived with the desired position and orientation. The position tracking errors of the setpoint cases are shown in Figure 7, where the red dashed lines depict the upper and lower bounds of the prescribed motion constraints. We can see that the tracking errors have converged to zero and did not violate the prescribed bounds. The tracking performance of

The actual path of the mobile robot in phase plane (setpoint).

Tracking errors
Tracking error
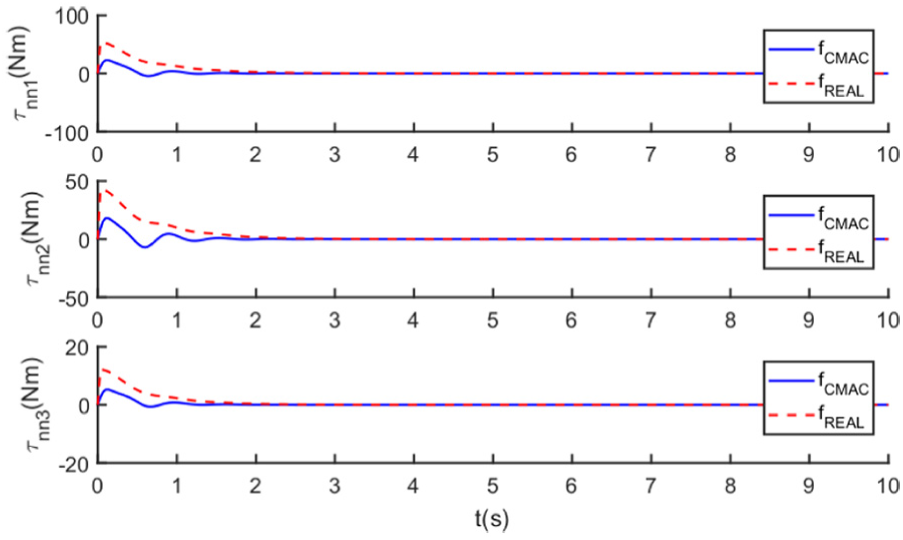
Approximation performance of CMAC neural network in the setpoint case.

Control input of the OMR in the setpoint case.
Path following cases
In the path following case, the mobile robot is commanded to follow a straight line under the proposed controller. The desired trajectory is selected as
The simulation results of the path tracking control are shown in Figures 11–15. From Figure 11, we can see that, after a short period of adjustment, the mobile robot has successfully tracked the desired trajectory and followed it very well. The position tracking errors of the path following case are shown in Figure 12, where the red dashed lines depict the upper and lower bounds of the prescribed motion constraint. Under the proposed controller, the prescribed constraints of the position tracking errors are not violated as shown in Figure 12. Also, the tracking performance of

A overview of the tracking performance of the path following case.

Tracking errors

Tracking errors

Approximation performance of CMAC neural network in the path following case.

Control input of the OMR in the path following case.
To further verify the robustness of the proposed control method, simulations are performed in the presence of surface friction forces and external disturbances during path following, that is,

Tracking performance of

Tracking performance of
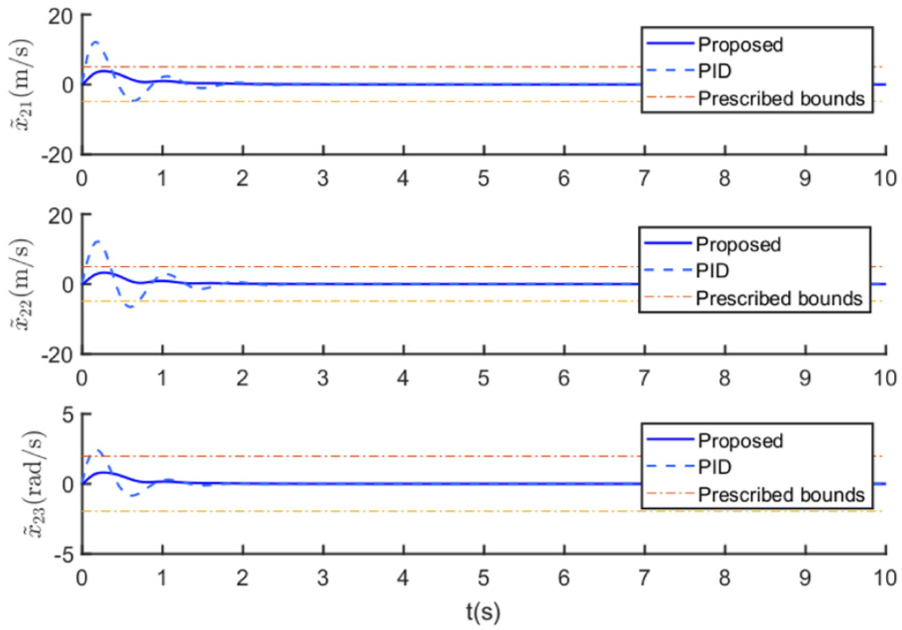
To further demonstrate the advantages of our proposed method, comparative studies have been carried out based on the proposed controller and a traditional CMAC controller 20 in the path following case. Figure 18 shows the velocity tracking errors under which a CMAC with the prescribed bound control (red solid line) is implemented as well as a CMAC is employed alone (blue dashed line). We can see from the first two subfigures that, although both controllers present satisfactory control performance, the proposed controller has successfully prevented the states from violating the prescribed bounds. This has shown the effectiveness of the proposed control method.

The tracking performance of
Conclusion
In this article, we have developed an adaptive global CMAC controller for an OMR with guaranteed prescribed transient performance. The prescribed bounds of the mobile robot were specified by the designed performance functions and the BLF technique was employed to integrate the prescribed bounds into the controller. The CMAC was employed in the control of the mobile robot for the compensation of the unknown system dynamics. Particularly, smooth switching functions were constructed to ensure the GUUB of CMAC neural inputs. In comparison to the conventional CMAC NN control, the proposed method does not require the initial neural inputs to remain in a compact set such that the condition can be relaxed. Simulations were carried out based on the model of the OMR, and two different types of trails were tested. The simulation results have shown that the proposed control scheme can achieve the desired transient performance even in the presence of the unknown disturbances. The future work includes real robot tests as well as the robot obstacle avoidance.
Footnotes
Handling Editor: Zhixiong Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Nature Science Foundation under Grant Nos 61473120, 61811530281 and 61773169, the State Key Laboratory of Robotics and System under Grant No. SKLRS-2017-KF-13, the Fundamental Research Funds for the Central Universities under Grant No. 2017ZD057, the Excellent Doctoral Dissertation Innovation Fund of South China University of Technology, and the China Scholarship Council.