
Abstract
The kinematic optimization of a type of parallel manipulator is addressed. Based on the kinematic analysis, the pressure angles within a limb and among the limbs are introduced, which have definite physical and geometrical meanings. In particular, a type of new pressure angle among the limbs (referred to as the second type of pressure angle among the limbs) is defined and considered to be one of the pressure angle constraints to ensure the kinematic performance. In the kinematic optimization phase, a global and comprehensive performance index, which combines the conditioning number of Jacobian matrix and pressure angles with the volume of workspace, is formulated as an objective function for minimization. One optimal kinematic design example that determines the dimensional parameters is provided to clarify the availability of the proposed approach. The analytical results indicate that good kinematic and dynamic performance can be guaranteed with the suggested design approach. Furthermore, the mutual effect between the dexterity and new pressure angle is analyzed. The effects of the pressure angle constraints on the minimum and maximum conditioning numbers and global dynamic performance indices through the entire workspace are discussed. The proposed research provides a method for the kinematic optimization design of parallel manipulators.
Keywords
Introduction
In light industries such as electronics, foodstuffs, pharmaceuticals, and everyday chemicals, pick-and-place operations are often required to inspect, carry, package, and sort the products. Generally, the operated objects have low weights and small volumes, and the pick-and-place operations are accomplished at notably high speeds and accelerations to achieve the shortest cycle time. Recently, parallel robots driven by rotary or prismatic joints have been rapidly developing to satisfy these industrial applications. Except for special surroundings that require only pure translations, the selective compliance assembly robot arm (SCARA) or Schoenflies motions1,2 for three translations and one rotation are often applied to the most pick-and-place operations.
Stimulated by the application requirements, a great amount of effort has been devoted to the problems of the types of mechanical topology, kinematics, dynamics, and control of parallel manipulators. Among these aspects, the kinematic design or dimensional synthesis is important in the evolution of the parallel manipulators 3 because the performance of a system with respect to the workspace, velocity, accuracy, and rigidity is significantly controlled by its geometrical features. In other words, it is the basis for subsequent design and analysis. The kinematic design primarily involves the determination of a group of design parameters, which can be fulfilled by optimizing a nonlinear objective function satisfied with a set of suitable constraints. It is universally acknowledged that the methods in the previous works to study the kinematic design of the parallel manipulator can be grouped into two types: the local optimum design,4–6 which concentrates on seeking the required parameter locus to generate a group of isotropy; and the global optimization design,7,8 which attempts to optimize a global conditioning index that satisfies the system performance. It is well known that the most applicable local performance index between the joint variables and the end-effector is the conditioning number of the Jacobian matrix.9–11 The representative global condition index in the kinematic optimization design is the mean value of the reciprocal of the conditioning number of the Jacobian index. 12 Next, this value has been expanded into various improved versions regarding the kinematic design of parallel manipulators,13–15 which further improves the kinematic performance.
Although the kinematic design of this type of parallel manipulator has been extensively examined, previous studies mainly focused on the conditioning index obtained from the Jacobian matrix or its improved form. Nevertheless, Huang et al. 3 found that the singular configuration of the 2-degree-of-freedom (DOF) parallel manipulator actuated by rotary joints remained even if the conditioning number of Jacobian matrix was 1. Therefore, with the maximum pressure angle being defined as an additional constraint, a comprehensive index that combined the area of the workspace and the conditioning number of the Jacobian matrix was used for the kinematic optimization design. In the comprehensive index analysis phase, a global fluctuation index based on the kinematic condition number was proposed by Ni et al. 16 This index was used to provide a statement of fluctuation of the velocity transmission feature, which acted as a part of the operating performance index.
The problems for optimization design of parallel robots have been discussed a lot in recent research work. Russoa et al., 17 for example, performed the multi-objective optimization using workspace volume, manipulator dexterity, static efficiency, and stiffness, which can decide the geometrical parameters of the parallel manipulator. Huang et al. 18 optimized their parallel mechanism with the genetic algorithm considering the workspace and global performance indexes of stiffness as well as the dexterity as the performance indices. Brinker et al. 19 aggregated the transmission and constraint characteristics into a single index, and the validity and applicability for kinematic performance optimization was proven. Another 2-DOF parallel mechanism was analyzed in the study by Huo et al., 20 where non-dominated sorting genetic algorithm II was utilized to optimize the design dimensional parameters by means of three global indices. Besides, optimal design of the Schoenflies-motion parallel robot had been implemented by Wu 21 to optimize kinematic performances, wherein the motion/force transmission indices corresponding to two pressure angles were taken into account as the performance evaluation criterion subject to the rotation capability, cuboid workspace size, and geometric constraints.
Several properties and conclusions can be generalized to the parallel manipulators with similar structures and configurations. In general, the ability of force/motion transmission in a mechanical structure can be determined based on the pressure angles and the kinematic performance of the manipulators can be represented by the condition number. Moreover, little research has been conducted to analyze other performances after the kinematic optimization design, such as the dynamic performance.
Based on previous studies, this article attempts to address the kinematic optimization issues of the design of a 4-DOF parallel manipulator under the limit of a group of geometrical constraints and pressure angle constraints. The remainder of the article is organized as follows. First, with the demonstrated kinematic models and Jacobian matrix, the pressure angles within a limb and among the limbs including the first and second types of pressure angles are proposed. Second, based on the constraint conditions of pressure angles and feasible geometric dimensions, a global and comprehensive performance index composed of the conditioning number and pressure angles is first formulated as an objective function for minimization. An optimization design example is provided to illustrate the validity of the proposed approach. Furthermore, the mutual influence between dexterity and the second type of pressure angle among the limbs is analyzed. And the effects of the pressure angle constraints on the minimum and maximum conditioning numbers and global dynamic performance indices through the entire workspace are discussed in depth. Finally, the conclusions are presented.
Kinematic analysis
The studied type of parallel manipulator consists of a base, a moving platform, and four groups of kinematic chains. Each kinematic chain contains active and passive segments, which can achieve three translations and one rotation around the vertical axis normal to the plane of the moving platform in space. To date, the available branched structures that satisfy the requirements can be roughly divided into two types: one type is driven by rotary joints and the other is driven by prismatic joints, as shown in Figure 1. Obviously, the passive link between them adopts the parallelogram branched chain. All articulations of the transformable parallelogram use ball-and-socket joints.
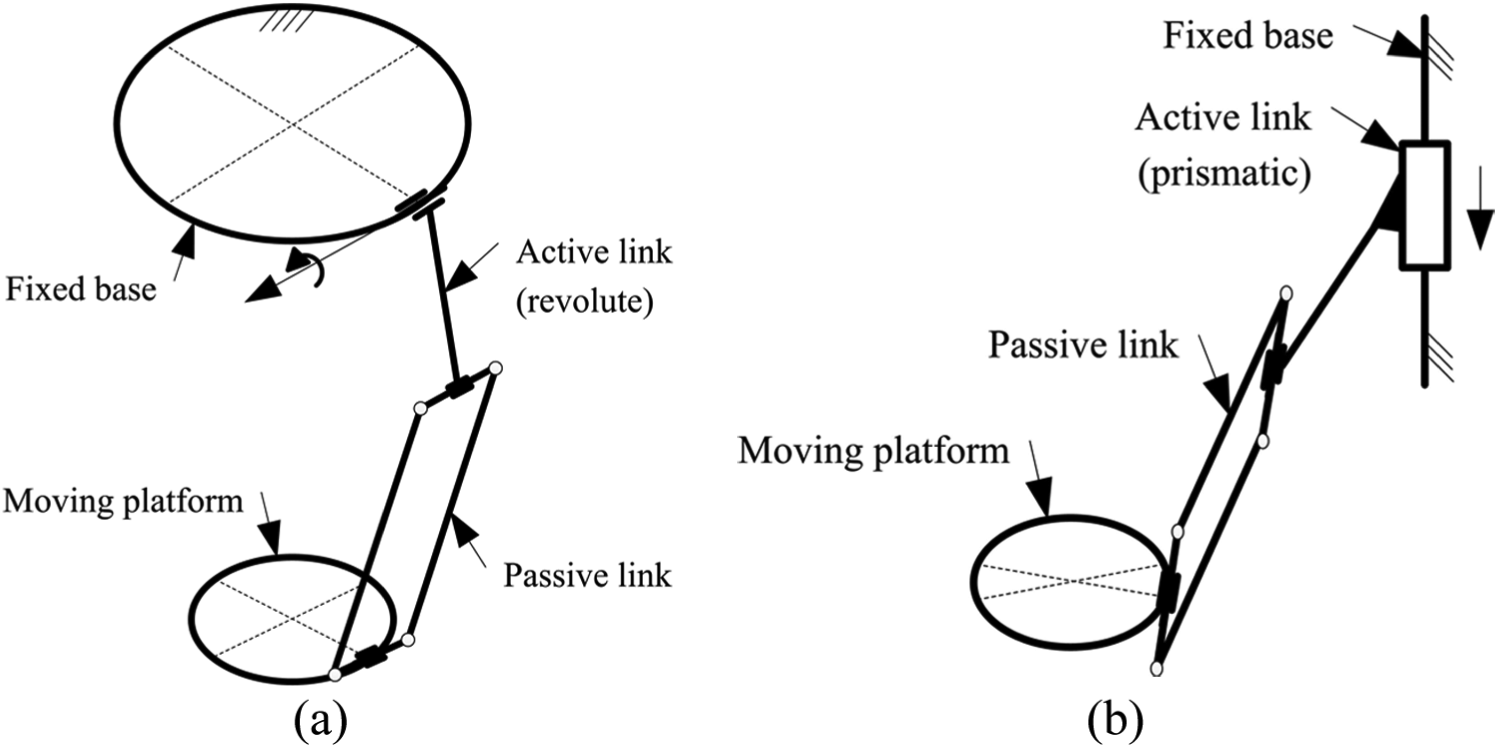
Two types of kinematic chains of the parallel manipulator: (a) driven by rotary joints and (b) driven by prismatic joints.
Because the four kinematic chains have almost identical structures, the reference frame is defined as shown in Figure 2, which simplifies the moving platform as point P. As shown in Figure 2, the coordinate frame O-xyz is attached to the static platform; therefore, the closed-loop position vector equation in the ith kinematic chain is expressed as

where e denotes the inscribed circle radius difference between the fixed base and the moving platform; l1, l2,

Vector diagram of a kinematic chain.
Jacobian analysis
Taking the derivative of equation (1) with respect to time yields

where

If joint Ai is a rotary joint, equation (2) can be written as

If joint Ai is a prismatic joint, equation (2) can be written as

Taking the dot product of


We rewrite equations (6) and (7) in the matrix form as


where

To facilitate the analysis, we combine equations (8) and (9)

where

where
where

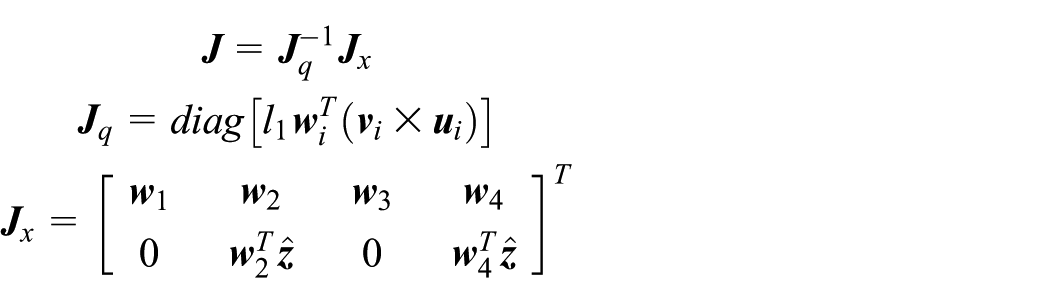
where L = l1 based on equation (12). The new Jacobian matrix can be expressed as
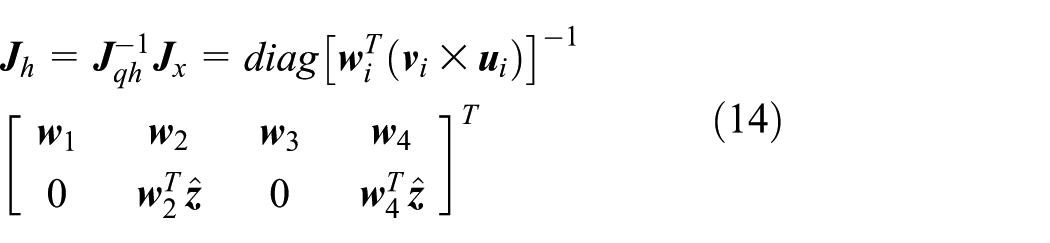
In summary, the condition number can be obtained using the dimensionally homogeneous Jacobian matrix provided by equation (14).
Pressure angle analysis
To establish the performance constraints in a visible form, some analyses will be performed. In general, the ideally accessible transmission paths can be divided into two categories: within a limb and among the limbs. Any failure of the first type of transmission will introduce the direct singularity, which signifies that the system loses the DOF. A failure of the second type will cause the indirect singularity, which implies that the system becomes uncontrollable. Therefore, two types of pressure angles can be formulated to describe the force/motion transmission abilities of the investigated parallel manipulator.
Pressure angle αi within a limb
With the above Jacobian analysis, the determinant of the direct Jacobian of the 4-DOF parallel manipulator is formulated as

Then, pressure angle αi within a limb can be defined by

The physical meaning of αi can be interpreted as the pressure angle between the velocity (along
Pressure angle γ/βi among the limbs
The determinant of the indirect Jacobian can be obtained from equation (12)

where
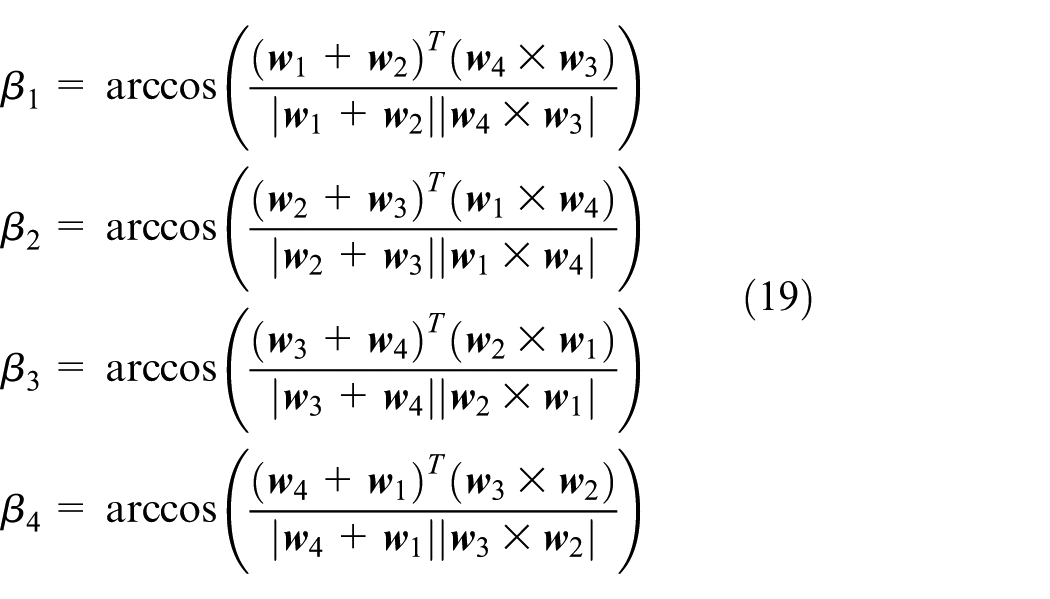
According to Liu et al., 25 pressure angle γ among the limbs of the 4-DOF parallel manipulator under consideration is defined by equation (18). In the following discussion, pressure angle γ is referred to as the first type of pressure angle among the limbs. Based on the calculation and analysis, a type of new pressure angle βi among the limbs is proposed by equation (19) as the second type of pressure angle among the limbs

On one hand, the geometric meaning of γ can be explained as the angle between the z-axis and the intersecting line of planes
Drawing an analogy with the pressure angle among the limbs of Delta robot, 31 the second type of pressure angle βi among the limbs can be formulated as
To explain the physical meaning of βi, we use β1 as an example (as illustrated in Figure 3). We assume that the driven joints in limbs 3 and 4 can be locked for the present. Then, β1 can be interpreted as the pressure angle between the velocity (along

Schematic diagram of the second type of pressure angle β1 among the limbs.
To provide a geometrical explanation of angle βi, and according to the indirect Jacobian obtained by equation (9) with the singular form, we can define the following submatrices

Similar to the definition of the pressure angles among the limbs of the Delta robot and combining with the 4-DOF parallel manipulator under consideration, we can formulate

It is clearly demonstrated that if the maximum of the corresponding angle range
Equation (16) shows that the direct singularity appears in αi = 90°, which causes det(
Optimal kinematic design
In accordance with the foregoing analysis, the optimization design of the 4-DOF parallel manipulator will be conducted. The dimensional parameters e, l1, l2, and H′ can be determined to achieve good performance throughout the specified cylindrical workspace with radius R and height H as illustrated in Figure 4.

Structure diagram of the 4-DOF parallel manipulator.
Objective function
The conditioning number of the Jacobian matrix is universally used as the local performance index to evaluate the velocity, accuracy, and rigidity mapping features between the joint variables and the moving platform. 32 The conditioning number κ is defined as

where σ1 and σ2 are the minimum and maximum singular values of the dimensionally homogeneous Jacobian matrix related to the specified pose.
Considering that κ varies with the configuration of the parallel manipulator, a conditioning index 33 similar to that devised by Gosselin and Angeles 12 serves as one of the global performance indices in the dimension synthesis. In the reference, a global conditioning index was introduced by the mean value of the conditioning number of the dimensionally homogeneous Jacobian matrix in the entire workspace. This index for the particular problem can be expressed by

where H and R are the height and radius of the cylindrical workspace Wλ, respectively; H′ is the perpendicular distance between the top surface of the cylindrical workspace and the center of the static platform that is the coordinate origin in Figure 4.
The index
In the computer implementation, the global conditioning index



where κmng is the value of κ, αmng(i) is the value of αi, and βmng(max(i)) is the maximum value of βi at node (m n g) when Wλ is divided evenly into (M – 1) × (N – 1) × (G – 1) copies; ΔW is the unit volume;
As a result, a global and comprehensive performance index can be formulated by the objective function for minimization. The index is expressed as

where ε is a hopefully nondimensional parameter. The indicator can be considered an improved version of the global condition number.
Constraints
In the optimal kinematic design of the parallel manipulator under consideration, a set of applicable constraint conditions for the force/motion transmission behavior and workspace/machine volume ratio should be considered.
Dimensional constraints
In general, the geometrical constraint condition related to the installation space of servomotors is set to offset e by

In addition, to satisfy the required workspace, the volume of the manipulator should be as compact as possible. Hence, the other constraint condition to consider is the workspace/machine volume ratio, which is expressed as 29

Simultaneously, according to the trilateral relations of the triangle, the following dimensional constraint inequalities can be formulated to enable the mechanism to be assembled, when point P is located at the lower and upper bounds of the workspace

Pressure angle constraints
From the above analysis, the pressure angle αi within a limb and pressure angle γ/βi among the limbs can denote the singularity of the mechanism and the force/motion transmission capabilities of the parallel manipulator within a limb and among the limbs. Therefore, to guarantee these above two aspects throughout the entire workspace, the following angular constraints are set:
Pressure angle constraint within a limb

Pressure angle constraint among the limbs


Thus, the maximum values of
The optimization design procedure can be summed up as illustrated in Figure 5. The detailed introduction will be provided below. Furthermore, the effects of pressure angle constraints on system performance will be analyzed at great length through an example.

Optimization design process.
An example
Determine the dimensional parameters
The aforementioned optimal kinematic design will be fulfilled to identify the dimensional parameters of the 4-DOF type of parallel manipulator with a cylindrical task workspace of D = 1.0 m in diameter and H = 0.25 m in height, as shown in Figure 4. With emin = 0.125 m for the servomotor installation, we have l1 = 0.375 m based on equation (29). In accordance with the above analysis, we minimize the global and comprehensive performance index ε in equation (27) and limit the boundaries of the workspace of end-effector by equation (30) with the prescribed allowable pressure angles [α] = 45°, [γ] = 40°, and [β] = 65°, which results in

The maximum pressure angle within a limb


Variations of (a) the conditioning number κ, (b) the pressure angle within a limb
These analysis results show that the proposed optimization method can guarantee the kinematic performance of the parallel manipulator.
It has been well acknowledged that the effective global dynamic performance indices were proposed by Huang and coworkers.
25
The global performances related to the inertial torque and centrifugal/Coriolis torque can be evaluated by the indices


These indices can be used to validate the effectiveness of the optimization method. The variations of

In summary, the proposed design approach is feasible; it can ensure the kinematic and dynamic performance of the parallel manipulator under consideration.

Variations of (a)
Angular analysis
The effects of the pressure angle constraints on the optimization results will be analyzed from two aspects: kinematics and dynamics. On one hand, the effect of the pressure angle constraints on the kinematic performance is as follows. To illustrate the effect of the defined second type of pressure angle among the limbs, the following simulation is performed as shown in Table 1.
Minimum and maximum conditioning numbers in terms of different constraints.

Table 1 is obtained by computing the optimization index in equation (27) with different angle constraints, respectively. A comparison of the optimization results shows that the first and second types of pressure angles among the limbs as a constraint have almost identical effects on the optimization of the objective function considering the improvement of the conditioning number. Then, for the pressure angle constraints of the optimization design, the first type of pressure angles among the limbs can be completely replaced by the second type of pressure angles among the limbs. As a result, the newly defined second type of pressure angle among the limbs has a certain action on the optimal kinematic design in this article.
We know that the dexterity has an important effect on the kinematic performance of the manipulator. The dexterity of a manipulator can be considered the ability of the manipulator to arbitrarily change its position/orientation or apply forces/torques in arbitrary directions. 34 The condition number of Jacobian matrix, which is considered an important evaluation index of dexterity, has been widely applied. To clearly present the mutual effect between the dexterity and the second type of pressure angle among the limbs, the optimized results referring to the condition number and the second type of pressure angle among the limbs are analyzed at different poses as shown in Table 2. According to Figure 6, the dexterity of the boundary in the workspace is relatively poor, which will be considered when we select the pose. The height of the cylindrical workspace is grouped into three layers: z1 = –(H′+H), z2 = –(H′+H/2), and z3 = –H′, and the points (corresponding to the poses) on the outermost circle divided equally into eight parts and the center point Pi0 (i = 1,2,3) are selected on each layer. The condition numbers and the second type of pressure angles among the limbs are calculated, respectively, on the aforementioned poses. It is not difficult to note that the second type of pressure angle among the limbs and condition number have similar distributions. They have identical changing trends at different heights. The condition number and the second type of pressure angle among the limbs at the lower boundary of the workspace are relatively larger, that is, the dexterity is poor. Instead, the value at the center of the workspace is smaller. In other words, the closer the points get to the z-axis, the smaller these values are, and have better kinematic performance. However, these indices that correspond to the disparate poses of the outermost boundary at identical heights do not significantly change. Therefore, the second type of pressure angle among the limbs and condition number have similar functions in evaluating the dexterity of the manipulator.
Conditioning numbers and the second type of pressure angles among the limbs at different poses.

It should be pointed out that achieving a better kinematic performance must be at the cost of decreasing the static and dynamic rigidity of the system. 25 In addition, Figure 6 shows that the minimum value with respect to the conditioning number and the second type of pressure angle among the limbs appear in the upper plane of the workspace, whereas the minimum value with respect to the pressure angle within a limb and the first type of pressure angle among the limbs occur in the lower plane of the workspace. Therefore, to achieve better and more comprehensive kinematic performance, these parameters must be compromised. Next, we carefully analyze the effects of the allowable pressure angles within a limb and among the limbs on the conditioning number for the parallel manipulator under consideration. Figure 8 shows that the minimum and maximum conditioning numbers of the entire workspace decrease with the increase in [α] = 40°–50° but increase with the increase in [β] = 60°–70°, whereas there are notably few changes with the increase in [γ] = 35°–45°. Thus, to obtain better mapping features between the joint variables and the end-effector, one must reasonably consider the pressure angle constraints, when we assume that the specified dimensional constraints are satisfied in the optimal kinematic design.

Variations of the minimum and maximum conditioning numbers through the entire workspace versus (a) [α] = 40°–50°, [γ] = 40°, [β] = 65°; (b) [α] = 45°, [γ] = 35°–45°, [β] = 65°; and (c) [α] = 45°, [γ] = 40°, [β] = 60°–70°.
On the other hand, the variations of the optimization results are discussed when the pressure angle constraints are changed for the global dynamic performance indices (as shown in Figure 9). Similarly, we use cyclic optimization to study the 4-DOF type of parallel manipulator considered. A similar conclusion can be drawn, where the first type of pressure angle among the limbs as a constraint does not significantly affect the optimization results. The effects of the pressure angle within a limb and the second type of pressure angle among the limbs on the dynamic optimization indices have opposite trends. In particular, index
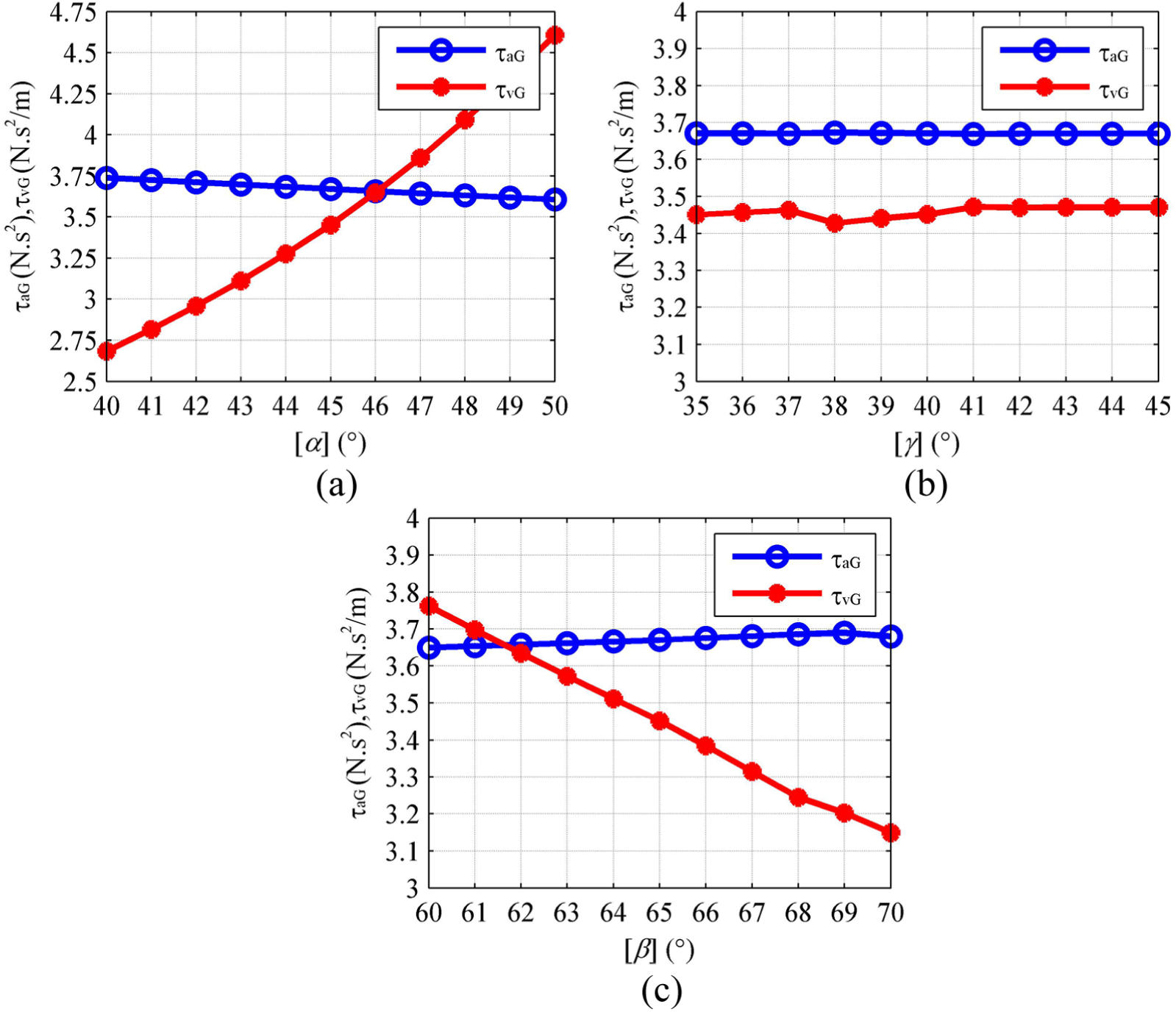
Variations of the global dynamic performance indices
Conclusion
This article introduces a method for the optimization design using a global and comprehensive performance index and pressure angle constraints. The subject is a type of parallel manipulator with three translations and one rotation. The conclusions are as follows:
Based on the kinematic analysis, two types of pressure angles for the 4 DOF parallel manipulator are defined, which enables the physical and geometrical meanings to be clearly connected with the geometry of system. Therefore, they can be used to obviously describe the motion/force transmission behaviors.
By minimizing the global and comprehensive performance index under the limit of a group of geometrical constraints and pressure angle constraints within and among the limbs, the dimensional parameters can be determined, and the preferable kinematic and dynamic performance can be realized over the entire workspace.
By comparing the variation of the condition number of the dimensionally homogeneous Jacobian matrix and the second type of pressure angle among the limbs in the workspace, we can conclude that they have similar functions in evaluating the dexterity of manipulator. The angular analysis shows that the pressure angles within a limb and among the limbs have different effects on the conditioning number and global dynamic performance indices, that is, we must reasonably consider the pressure angle constraints in the kinematic optimization design.
The proposed optimization method in this article is also applicable to other parallel manipulators. More comprehensive tests will be performed on this type of parallel manipulator and introduced in detail in the future article.
Footnotes
Handling Editor: Shun-Peng Zhu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Technology Research and Development Program of the Ministry of Science and Technology of China (Grant No. 2015BAF11B00).