
Abstract
In order to meet the ever-increasing freight capacity demand, operation of heavy-haul freight trains with a 50,000 t capacity has been widely studied for a decade in China. A typical heavy-haul train with a large capacity employs multiple locomotives that are evenly distributed along the train, and each locomotive, or two or more locomotives, hauls a certain amount of freight cars. The synchronicity among locomotives is of great importance to safety. A 50,000-t train developed in China will be pulled by 10 locomotives, and the uneven distribution of traction or brake force, caused by the asynchronous command execution of different locomotives, could eventually lead to severe accidents such as decoupling. This article focuses on how to apply the existing wireless-based multi-locomotive synchronous control system to the trains with the capacity of 50,000 t. The modular functionality of the control system is introduced, and some methods aiming to enhance the reliability of wireless communication are discussed. Then four experiments conducted on real trains or in laboratory are described. Test results show that the wireless synchronous control system can meet the technical requirements of 50,000-t trains and its operation is feasible.
Introduction
As an important impetus for enhancing freight transportation capacity, heavy-haul train represents the development trend in the field. 1 Instead of a single-locomotive traction, a typical heavy-haul train2–4 is pulled by several locomotives, 5 which are located at each end of the train or evenly distributed in the train. Specifically, for a power-distributed train, the traction and brake force 6 of each locomotive 7 should cooperate in balance to avoid large forces, thus to ensure safe operation. Wireless control8,9 holds great promise for salient performance of synchronization among multi-locomotives. 10 In China, haul freight trains of a 20,000 t capacity have successfully been put into practice with the help of GSM-R 11 Technical Standard and Locotrol wireless synchronous control system, which increases the annual transportation capacity to three times higher. Currently, China heavy-haul trains work at two capacity levels: 10,000 and 20,000 t, but those still cannot catch up with the demand and higher capacity is strongly needed. Therefore, the feasibility of 50,000-t train has become a hotspot, and multi-locomotive synchronous control is the key technical issue that needs to be investigated extensively.
Many researchers have conducted preliminary studies on heavy-haul freight trains 12,13 from various perspectives, and most of them are from countries that rely heavily on massive freight transportation, such as Australia, Canada, China, and the United States. Given that heavy-haul rail systems consume more energy and emit more greenhouse gas than smaller capacity freight rail or road transport systems, 14 Sun et al. 15 introduced the concept of hybrid locomotives and their simulation verified that energy recycling during the period when the train slows down decreases traction consumption. Rail track of heavy-haul line has also attracted much attention. Khouy et al.16,17 investigated track quality measurement and improvement, as well as the maintenance of track components like turnout. McClanachan and Cole 18 reviewed the current train control optimization methods 19 of heavy-haul railway with respect to three criteria of minimizing journey time, energy consumption, and in-train dynamics. Among the studies dedicated to locomotive control, Ma et al. 20 identified the key issues in the operation of 20,000-t heavy-haul trains through a case study of Datong–Qinhuangdao coal transport line of China railway, and concluded that wireless synchronous control must be applied to the locomotives of the train with this high capacity. Locotrol, the wireless synchronous control system, has been introduced and utilized on 20,000-t trains in China. Zhao et al. 21 analyzed the influence of this control technology on the longitudinal force of trains, and longitudinal force simulation indicated that the time interval of executing operation commands between the master and the slave locomotives cannot exceed a certain value for the sake of safety. Gao et al. 22 conducted a similar study on Locotrol-based trains and discussed the performance of brake when the train runs down steep slopes with this control method. As for the wireless communication network formed by all the locomotives of a single train, the study by Geng and Zhong 23 focused on the reliability of the network and compared it to the specifications of two locomotive synchronous control systems. In spite of the above studies, further effort is required to understand the operation of freight trains with a capacity higher than 20,000 t, given that trains of this high level are the mainstay for catering the significant demand of China freight transportation. 24 Furthermore, higher capacity trains are different from those of lower capacity in many aspects, such as length, traction performance, and safety standards, many of which are related to the performance of synchronicity among locomotives.
We introduce the formation of a synchronous control system based on a wireless network 25 for 50,000-t freight trains and discuss several practical measures for strengthening the reliability of the synchronous control. Then, we conducted four experimental tests, all pertinent to the performance of the wireless synchronous control system for 50,000-t trains. The results demonstrate that the locomotive synchronous control is effective for 50,000-t heavy-haul freight trains when using the proposed control system and taking measures discussed in this article.
Multi-locomotive wireless synchronous control system
As shown in Figure 1, a 50,000-t train consists of five sets of double-heading units: the leading unit acts as the master, whereas the remaining four are slaves. The two locomotives in each unit are connected by communication cables and brake pipes. One unit hauls 108 freight cars which have a total freight capacity of 10,000 t and stretch 1425 m. The master unit is 5700 m away from the last slave unit. The synchronous control of multi-locomotive units is realized by signal transmission via wireless network from the master unit to each slave. This approach does not need processing nodes on the ground and works smoothly when the transmission frequency is 800 MHz, but it needs extra inductive communication equipment when the frequency is 400 kHz.

Formation of 50,000-ton freight train.
The control system consists of four units, as shown in Figure 2. The process and control unit connects all other units in the system and acts like the CPU in a computer. The data transmission unit sends signals to and receives signals from its counterparts in the systems installed on the other double-heading units. The human–machine interface (HMI) unit displays information and also collects operation commands from users, while the device interface unit interacts with modules and components on locomotives. Both ends in each double-heading unit are equipped with the same system.

The synchronous control system.
First, the master unit gives a command, and the control system on the master unit converts it into a synchronous control command using logical encoding. Then the signal is sent out via the data transmission module on the master and received by those on the four slaves. The transmission delay of the command to each slave is determined by calculation, based on which each slave unit executes the command in such a way that all the five double-heading units can be synchronously controlled. On the other hand, states of command execution by the slave units are fed back to the master. As each unit has a fixed ID number, each slave unit is designed to exclusively receive the commands from the master and will not be interfered by information meant for other units.
Measures of enhancing reliability of wireless transmission
The reliability of transmission, which plays a vital role in the wireless synchronous control system, directly influences the actual performance of train control. This feature is often evaluated by data error rate that theoretically depends on two factors, as follows:
Distance of transmission
Due to the effect of the earth curvature on the transmission of electromagnetic wave, the effective transmission distance of two antennas is determined by

where H is the height of antenna 1 and h is the height of antenna 2.
The height of antenna on the locomotive is limited by the vehicle gauge. Given the long stretch of freight trains, communication between the master unit and each of the slave unit is a challenge. One solution is to deploy intermediate slave units to relay signals so that even the farthest slave can interact with the master unit.
2. Field intensity at receiving units
The radio wave is emitted by the transmitter and propagates outside, and its power will be lower at the receiving end due to transmission attenuation, which is calculated by


where Pr is field intensity of the signal where it is received, Pt is field intensity of the signal where it is generated, Gt is antenna gain at the transmitting link, Gr is the antenna gain at the receiving link, Lt is the power loss at the feeder wire of the transmitting link, Lr is the power loss at the feeder wire of the receiving link, L0 is the power loss in the air, f is the frequency of transmission, and D is the distance of transmission.
It clearly shows that the field intensity of signals at the receiving units is determined by several factors, and the bit error rate of transmission will be higher when the receiving field intensity becomes lower.
The enhancement of synchronicity mostly relies on shortening control period. The control period is defined as the sum of two time parameters: command response time (CRT), which indicates how long it takes for the slave units to receive the signals from the master unit, and information feedback time (IFT), which measures how long the reverse process occurs.
Proper transmission band
It can be found from equations (1) and (2) that the signal will substantially attenuate as the wave frequency is higher. When a heavy-haul train runs along tunnels, mountain cuttings, or complicated terrains, the 800-MHz signal used among locomotive units would probably be blocked or impeded by the obstacles, causing communication failure. Therefore, 400-kHz inductive transmission is used as an alternative in such scenarios. The induced signal, which is transmitted along the overhead lines as an electromagnetic field, is generated within the area around the metal wire via electromagnetic induction, minimizing impacts of the terrains. Thus, the wireless transmission can be guaranteed.
Smart frequency point switching
The performance of wireless transmission on a train would probably become worse if it is disturbed by wireless systems equipped on other trains due to their same signal frequencies. This may happen when two trains meet at a double-track section or when a train is in a classification yard. To avoid this, the system should be able to automatically change the transmission frequency when the operation control module detects another signal of the same frequency outside the train.
System redundancy
Each end of the double-heading unit is equipped with a wireless data transmission system, and both devices are in working state when the train is in operation. On the operating-end locomotive, the 800-MHz and 400-kHz signal channels are both in service, and for the other (non-operating end), the 800-MHz channel is in service while the 400-kHz radio remains standby if the communication network works normally. In this way, the transmission can be performed by three channels (two for 800 MHz and one for 400 kHz) on each double-heading unit, which ensures the higher rate of successful transmission and the stability of the whole system.
Dual-transmission modes: broadcast and relay
The system is designed to transmit signals in two different ways: broadcast and relay. Broadcast means that the signal from the master unit is received directly by the four slave units, while relay indicates that the signal is received by the intermediate slave unit(s) and then re-transmitted to the farther one(s), where the signal is received and relayed back to the master unit. Relay mode, while increasing the time delay compared with broadcast mode, is still employed due to the possible transmission failure when the train runs through complicated terrains. Hence, such combination is a balance between reliability and synchronicity. Furthermore, the transmission time of the signal between units in the relay mode can be substantially shortened by optimizing communication management and time slot assignment, leading to enhanced performance of synchronous control. Although broadcast mode is faster, relay mode can effectively solve the problem that the lead locomotive and the rear locomotive in the mountain tunnel cannot communicate reliably because of the long communication distance. Therefore, locomotives can combine broadcast mode and relay mode to communicate with each other.
The mode working at a frequency of 800 MHz and that working at 400 kHz are different in some aspects. The 800-MHz mode transmits data at a speed of 9600 bps, and its synchronous control period cannot exceed 2500 ms when the signal is relayed by three intermediate slaves between the master and the farthest slave. And the 400-kHz mode, with a data transmission rate of 2400 bps, can achieve maximum CRT and IFT of 2500 and 3500 ms, respectively, given the same three relays, yielding an estimated synchronous control period of 6000 ms. In short, by combining the two modes at 800 MHz and 400 kHz, the synchronous control period can remain no more than 6 s, which meets the requirement.
Experiments
Four experiments were conducted in order to test whether the measures discussed above meet the requirements for synchronous control of 50,000-t heavy-haul train.
The radio communication test focused on the performance of data transmission at the frequencies of 400 kHz and 800 MHz. The multi-unit communication test employed simulation devices in laboratory to inspect performance of interaction between the master and the four slaves, viz., the cycle of command signals from the master to the slaves and feedback signals back to the master. The functional experiment, which was based on the multi-unit communication test, examined if the slave units were able to receive commands from the master, executed the commands, and output the result to HMI units. The synchronicity performance experiment, as the ultimate goal of the research, was to determine the synchronous control period to evaluate the synchronicity.
Radio communication test
This experiment was carried out on a coal transport line and the test train run through diverse terrains and rails roughly at a speed of 400 km, including tunnels, curves, flat and open areas, as well as long and steep slopes, roughly at a speed of 400 km. Two sets of the synchronous control systems were installed on two double-heading units, between which were 10,000-t freight cars. Figure 3 depicts the field intensity of the 800-MHz signal that the master transmits to the farthest slave along the whole test section.

Field intensity along the test section.
The result indicated that the power intensity was salient when the train run through plains or tunnels, and its value remained at a level greater than 15 dB µV in general. However, radio wave propagation was greatly influenced by a curving tunnel end or a cluster of short tunnels which were separated but densely lined up. The intensity dropped when one of the transmitting and receiving modules was inside a tunnel and the other was outside or inside another tunnel. The signal was heavily impeded when the train met another train from the opposite direction on the other side of the double track. The total length of the sections in this test with an intensity below 15 dB µV added up to around 73 km.
The success rates of data transmission, an important factor for evaluating the reliability of wireless communication, were 74.5% and 81.6%, for the 800-MHz and 400-kHz modes, respectively. In contrast, when the combined method was applied, the rate went up to 95.1% and this can fairly meet the standard of communication. Figure 4 plots the parameter value along the whole section. Some of the success rates were not ideal, but most of them were 100% and the overall effect was satisfying.
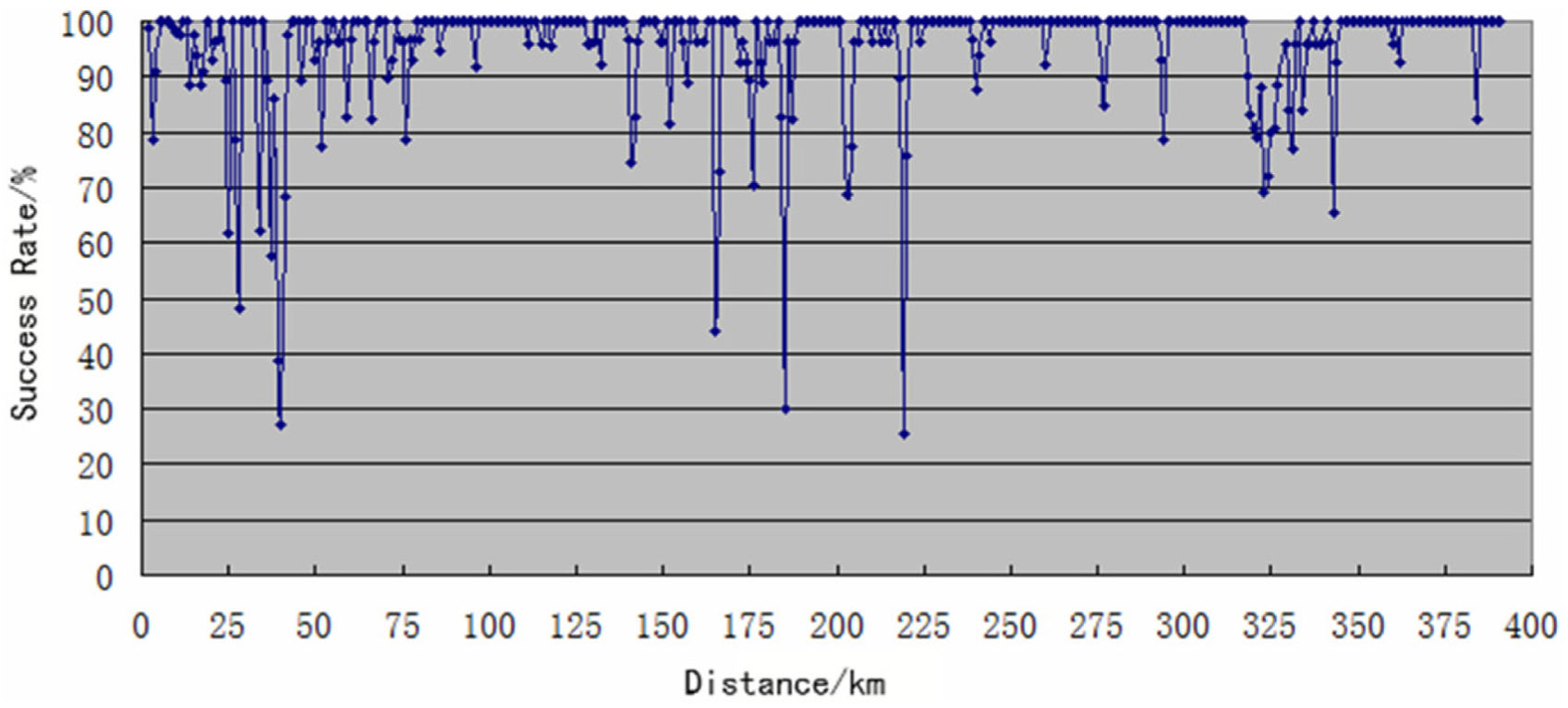
Success rate of data transmission by the combined 800-MHz and 400-kHz method.
Figure 4 implies that the rate value remained above 95% most of the time during the test. Actually, in some occasions of worse rates, the reliability of data communication could still be ensured by technical measures, such as ground intensity enhancement and error correction encoding. The test demonstrated that the communication success rate can support the feasibility of operating 50,000-t heavy-haul trains.
Multi-unit communication test
As the effectiveness and the success rate of wireless communication between two double-heading units were validated, we looked into a scenario involving five units. Since this scenario cannot be realized on a real train, we simulated it in laboratory. We utilized five sets of the units, and each of them consisted of a control system and a model operation panel as a part of the cab in real locomotives. The schematic of the composition of a single train is shown in Figure 5 where BCU is the Brake Control Unit, IDU is the Indoor Unit, MVB is the Multifunction Vehicle Bus, OCE is the Online Capacity Expansion, DTE is the Data Terminal Equipment, and RS-422 represents the electrical characteristics of the balanced voltage digital interface circuit.

The schematic diagram of the composition of a single train.
The whole test was divided into two sub-tests. In the first part, the master unit continuously sent command signals, which were received by the four slave units. Then, the data frames were decoded so as to be recognized, displayed, and executed by relevant units of the control system. It was followed by the reverse process that the master received the feedback information. The signal was normally received, decoded, and displayed by all of the four slaves. The second test simulated the network initialization of locomotive units, and therefore all the slave units could be identified and loaded with start-up states issued by the master unit. The signal was normally received, decoded, and displayed by the master.
The test showed that information can be continuously transmitted from the master and accurately decoded at the slaves and vice versa. Although this test was conducted in lab with some specific factors simplified or ignored, like distance of transmission, it is still of great importance as it took all the five units into consideration.
After the communication network of the five units was set up, the unit defined as the master was able to control all of the four slaves by commands. It indicated that some configurations and settings, given by operations at the master, were correctly received and printed on HMI at the slaves. As the initialization task was done, the master and the slaves started to interact and signals carrying different types of functional commands from the master could be transmitted to the slaves.
Functional experiment
Following the preceding experiment, the third test examined the performance from the perspective of functionality by employing the same laboratory test method. Various commands related to locomotive control were sent from the master to the slaves. The signal was in turn fed back to the master to indicate states of the slaves after the commands were executed. Test items included control logic, brake command, synchronous traction/brake control, communication interruption, failure warning, and semi-automatic control when passing neutral sections. Contents of the two test item groups are listed in Tables 1 and 2: one group collects some instructions of device operation and the other records brake-related commands.
Device operation command test.

Brake command test.
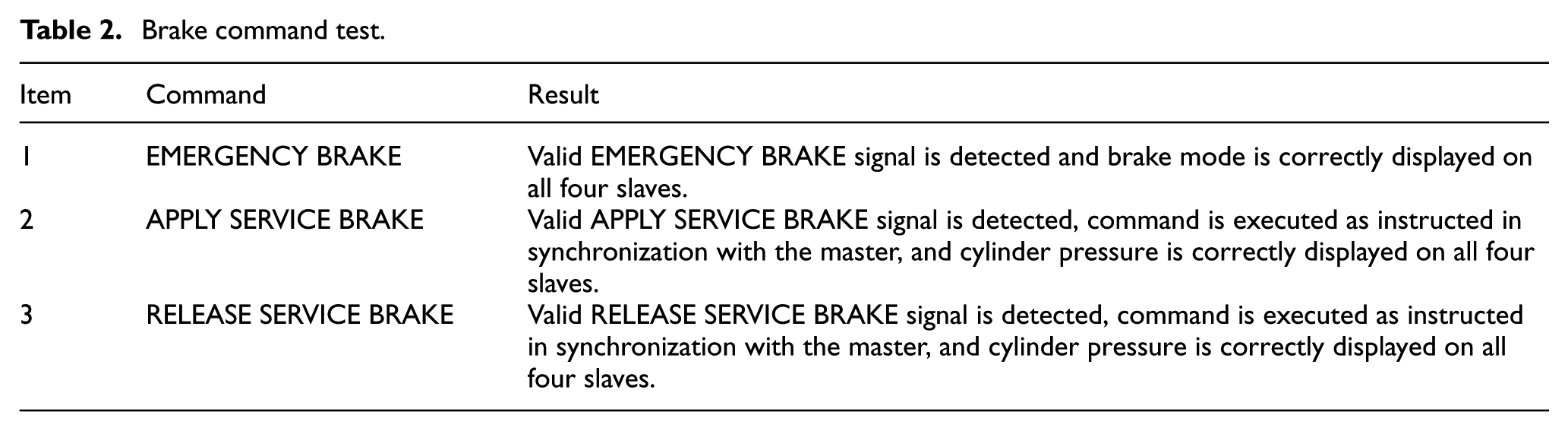
The test results revealed that, with the application of this synchronous control system, different commands can be successfully transmitted from the master to the slaves and correctly executed, which validated that the system is reliable to transmit commands and order the slaves to execute the functions synchronously.
Synchronicity performance experiment
A relatively low time delay is strongly desired to optimize the performance of the synchronicity among units, and the synchronous control period can be kept within the safety-concerned upper limit by the measures discussed above. In this test, relays were placed in the control circuit of all the five double-heading locomotive units to measure some switch-featured signals. As a command was generated, it was self-executed by the master unit, simultaneously transmitted via the control system, and executed by the four slaves. The switch action of the relay placed on any slave unit could lag behind the one on the master by different amounts of time, which is defined as the CRT of each slave unit as the majority of delay resulted from transmission. Layouts of the five laboratory test models were exactly the same as those of the five units in a real 50,000-t train since the effect of time delay is based on the distance between two units. The test was repeated adequate times for statistically meaningful results. Figure 6(a) and (b) presents the distribution in pie charts of this parameter for two groups of test items.

Distribution of CRT values: (a) in device operation command test and (b) in brake command test.
In the device operation command test, the values of CRT varied from 0 to 2 s, and the largest and the average were 2 and 0.59 s, respectively. In the brake command test, all values fell between 0 and 1 s, with the maximum of 1 s and the average of 0.83 s. All the CRT values were within 4 s, the safety threshold in train operation. As the parameter that can evaluate synchronicity performance in the most direct way, the synchronous control period of each slave unit was figured out in the device operation command test. Our research mainly focused on the farthest slave, as the farther the slave unit locates from the master, the longer the whole command and feedback procedure takes.
Conclusion
The synchronicity of locomotives has been of great importance for the feasibility study of heavy-haul freight trains with a 50,000 t capacity. Based on the successful operation of trains with lower capacity, several measures were designed to enhance the reliability of the current wireless synchronous control system in order to meet the requirements of 50,000-t trains. Four experiments were then carried out on a real train or through simulation to examine the performance of wireless signal communication, multi-unit communication and network initialization, functional command transmission and execution, and synchronicity among the units. All the test results confirmed that the control system in this study is feasible and applicable to 50,000-t trains.
Footnotes
Acknowledgements
The authors are grateful to the reviewers for their helpful comments and suggestions.
Handling Editor: Salvatore Strano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (61703308), the National Key R&D Program of China (2016YFB1200402 and 2015BAG19B02), and the Fundamental Research Funds for the Central Universities.