
Abstract
This study considers the control problem of constrained robotic manipulators with dynamic uncertainties. A new force/position control strategy is proposed based upon terminal sliding mode and neural network. The terminal sliding mode combines position tracking with velocity tracking, and the neural network estimates unknown dynamics. Then, an adaptive control law is utilized to ensure finite-time convergent performance of position tracking and boundedness of contacting force tracking. Compared with existing force/position control strategies, the proposed strategy ensures the convergent performance without nominal model of the system dynamics. Simulation analysis verifies that the proposed strategy is effective.
Introduction
Finite-time convergent tracking control is a very hot spot in the robotic manipulator control field.1–3 The objective of it is to build a feasible controller to ensure that the manipulator can converge to desired trajectories within finite time. When the robotic manipulators perform contacting tasks, such as grinding, there will be an unignorable contact between the end effectors and the working environment, which puts forward a control need of the contacting force as well as the joint position. If the contacting force is not well-controlled, even tiny position error may result in significant change of the contact force, thus hindering the accomplishment of the tasks, even damaging the end effectors.
Owing to the great effort made by researcher in this field, a great many methods have been designed to meet the aforementioned need. A good survey can be found in Thomas et al., 4 where the control strategies for robotic manipulators were reviewed. The popular control techniques include artificial neural network (ANN), H∞ control, and sliding mode control. Rani et al. 5 proposed an ANN-based position/force controller for constrained manipulators. Chiu et al. 6 utilized coordinate transformation to decouple the position/force tracking and designed a scheme to achieve the tracking aim. Rani and Kumar 7 developed a radial basis function neural network position/force tracking. Zhou et al. 8 developed an H∞ control method for position/force tracking. Karayiannidis et al. 9 proposed a position/force control strategy which employs neural network technique to estimate the unknown dynamics. However, this strategy can only guarantee ultimate boundedness of both position and force errors.
Because of its advantages in terms of robustness, sliding mode control enjoys great popularity in the field of position and force tracking control. Lian and Lin 10 designed a force/position controller with conventional linear sliding mode (LSM). However, most LSM-based controllers for constrained robotic manipulators only guarantee asymptotic convergence, instead of finite-time convergence. Therefore, Cao et al.11–13 designed a series of position/force control schemes using terminal sliding mode (TSM). Parra-Vega et al. proposed a continuous TSM position/force control to avoid chattering problem. However, these schemes require prior dynamic knowledge of the robotic manipulators. Owing to the high nonlinearity and coupling characteristics, the dynamic knowledge cannot be obtained exactly in many applications. 14
In this article, a robust adaptive control scheme is designed based upon TSM technique and radius basis function (RBF) neural network. In this scheme, the TSM combines position tracking error with velocity tracking error. And the RBF network estimates the unknown dynamics of robotic manipulators. Based on these two techniques, a robust adaptive position/force controller is developed to achieve finite-time convergent performance of position tracking. Compared with the existing force/position control strategies, the designed method achieves finite-time convergent performance without using the nominal dynamic model.
Problem formulation
RBF neural network
Owing to its superior features in structure and convergence, RBF neural network has been widely utilized to approximate nonlinear functions. The approximation function can be expressed as follows15–17

where

where
Dynamic model
Consider the following n-joint manipulator performing contacting tasks. Its dynamical model and environmental constraint6,10 are


where
As discussed in previous works,6,10,13 we may select


Then, we have



Based upon equations (3), (8), and (9), the dynamic equation can be transformed into

Multiplying the above equation by

where

After the above coordinate transformation, a useful property about the constrained robotic manipulators can be obtained,6,10,13 that is

Problem formulation
Before formulating the problem, define the position and force tracking errors as follows




where equation (12) denotes the full-state position tracking error, equation (13) denotes the reduced-state position tracking error, equation (14) denotes the contacting environmental constraint force error, and equation (15) denotes the generalized multiplier tracking error.
Since the actual and desired position vectors are
Therefore, the control problem of this study is in the absence of exact dynamic knowledge of the robotic manipulator given by equations (3) and (4), design a feasible controller to achieve finite-time convergent performance of position tracking and boundedness of force tracking.
Controller design
The TSM vector can be designed as follows12,18,19

where

in which
For the convenience of formulation, define an auxiliary vector


The existing TSM-based position/force control schemes for constrained robotic manipulators often assume that the dynamical model can be decoupled into a known nominal part and an unknown uncertain part. However, in many applications, even the nominal model cannot be easily obtained. Aiming at addressing this problem, we utilized the RBF network technique to estimate the dynamical model, that is

Then, the robust controller can be designed as follows

and the two parts in it are designed as follows


in which

The weight

where
Define

Theorem 1
For the robotic manipulator characterized by equation (3) under the environmental constraint given by equation (4), if the TSM is adopted as equation (16) and the controller is given by equations (21)–(25), then the boundedness of both position and force tracking errors can be assured.
Proof
By utilizing the following Lyapunov function candidate 15 to analyze the stability of the designed controller

Define
The time derivative of

According to equations (11), (16), and (20),

Replacing
Substituting
Using the adaptive law (equations (25) and (26)), the above equation can be rewritten as follows

Since

According to the Lyapunov stability theory, the above expression (33) assures the boundedness of
Owing to the property of the Gaussian function, it can be figured out that
Theorem 2
For the robotic manipulator described by equation (3) under the environmental constraint given by equation (4), if the TSM is adopted as equation (16) and the controller is given by equations (21)–(25), and
Proof
By utilizing the following Lyapunov function candidate 15 to analyze the stability of the designed controller

Since
The time derivative of

Considering that the structure of the controller is the same as the one in Theorem 1, it can be obtained that equation (30) still holds. Substituting it into equation (35), one can obtain that

Since the control gain is designed to be
where
According to Lemma 2 in literature,
18
we can obtain that expressions (34) and (37) assure finite-time convergence of
Next, we will analyze the stability of the constraint force tracking. Substituting the control law (equations (21)–(23)) into equation (10) yields

Since

According to Theorem 1, one can obtain that the terms inside equation (39) are bounded. Thus, the constraint force converges to the desired force with a bounded error. The force control gain
Simulation verification
Figure 1 manifests the workflow of the proposed method.

Workflow of the proposed control method.
A two-link constrained robotic manipulator model is utilized as a simulation example to verify the proposed method. The dynamical equation of the robotic manipulator is

in which

where
The environmental constraint in joint space can be described as follows

where
The initial values of

The control gains in equations (21)–(25) are designed to be
Figures 2–4 depict the numerical simulation results under the proposed robust adaptive TSM-based control method. Figure 2 shows the joint tracking errors

Joint tracking errors under the designed strategy.

Constraint force tracking error under the designed strategy.

Control inputs under the designed strategy.
To further show the advantages of the designed method, the following simulation compares it with the existing LSM method in the work by Karayiannidis et al. 9 Using the same parameters, the tracking performance of Karayiannidis et al. 9 is shown by Figures 5–7. It can be seen that the designed controller exhibits faster convergence as well as higher steady-state precision in terms of position tracking.
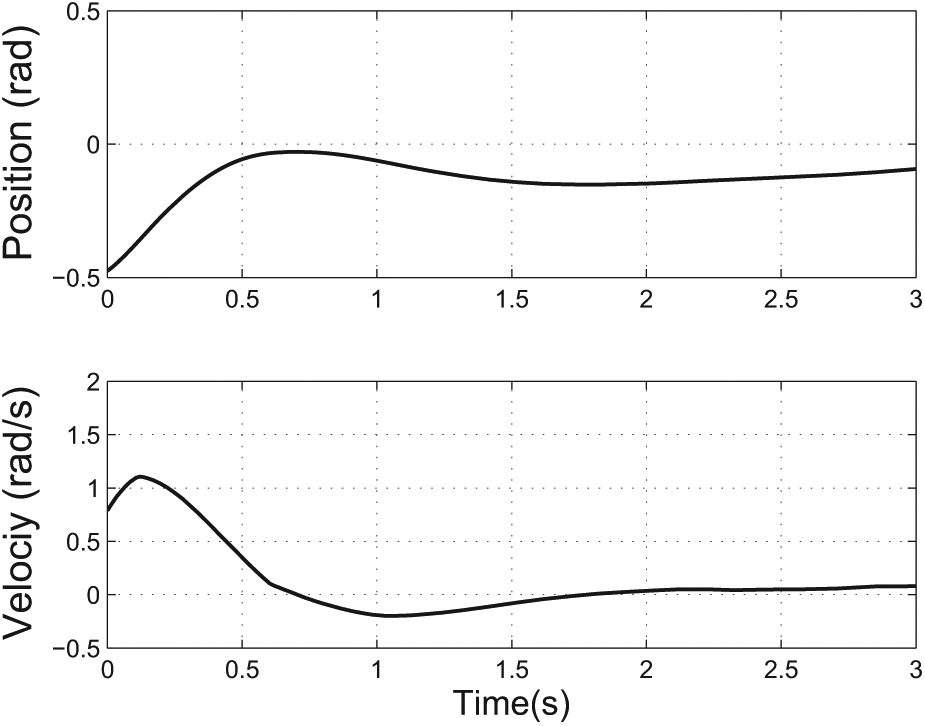
Joint position and velocity tracking errors under the LSM method.

Constraint force tracking error under the LSM method.

Joint torque under the LSM method.
Conclusion
A new position/force control method is designed based upon TSM technique and RBF network to achieve simultaneous position and force tracking. The main contributions are as follows: (1) the finite-time convergent performance of position tracking is achieved by the designed controller and (2) the TSM control theory is combined with the RBF network so that the restriction of requiring exact knowledge of the constrained nominal model can be removed. Lyapunov stability analysis verifies that the designed method is effective. Future improvement may be concentrated on the application to flexible joint robotic manipulators. The limitation of this research is that the experimental validation of the proposed method has not been carried out. In the future research, experimental and field testing will be conducted to evaluate the proposed method.
Footnotes
Handling Editor: Zhixiong Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.