
Abstract
In this article, a set of fuzzy logic controller is alternatively designed for control of nonlinear systems in Lyapunov sense. Through referencing the statuses of error states and error dynamics, the corresponding fuzzy if–then rules can be constructed based on Lyapunov Stability Theory following the proposed standard design procedure, where simple quadratic form is decided for candidate Lyapunov function. Different from previous research achievements, the resulting controllers are simple constant forces, and for control of two nonlinear systems with different structures, the design procedure is still the same without any further information. Furthermore, appropriate and adjustable control forces with less maximum magnitude are stably supplied through exciting the weighting through the constructed fuzzy if–then rules, which leads the proposed fuzzy logic controllers compensate control system more flexible and in real time. Two examples, control of two identical and different nonlinear systems, are illustrated for simulation examples. In comparison to the previous work, the simulation results reveal the effectiveness, flexibility, as well as convenient design of the proposed method.
Introduction
The concept of fuzzy logic is proposed by Prof. LA Zadeh in 1965, 1 which has received much attention as a powerful tool for interdisciplinary applications, especially in the field of fuzzy logic control (FLC)system.2–9 FLC has been designed and further applied to intelligent mechanical systems for many years, such as Wang et al. 10 applied the multiple-input and multiple-output (MIMO) fuzzy control technology to self-assembling of swarm modular robots, Chang and Tong 11 designed a set of adaptive fuzzy control approach for permanent magnet synchronous motors, Li et al. 12 proposed the FLC-based output feedback control problem for interval type-2 fuzzy systems of a mass–spring–damping system, and Hao and Kan 13 proposed self-tuning fuzzy proportional–integral–derivative control in hydraulic crane control system.
Many great researchers devoted themselves to create novel approaches to improve the performance of FLC system and ensure their stability, for instances, Lee 14 developed a set of systematic method to design proportional–integral (PI)-types FLC system in 1993, which focuses on linear system analysis; for nonlinear systems, Ying 15 presented a practical design method to study the stability of FLC system in 1994; and Choi et al. 16 developed a single control input to ensure the stability of FLC system in 2000.
Yau and Shieh 17 proposed a robust and effective fuzzy logic controller to force two identical chaotic systems with two and three orders to be synchronized in 2008, which constructs the fuzzy if–then rules subject to a common Lyapunov function such that the error dynamics satisfies stability in the Lyapunov sense. In Yau and Shieh, 17 the resulting controllers are in nonlinear form, and for control of nonlinear systems with different structures, expert experience is required. Based on this kernel designing spirit, Li and Ge 18 and Li 19 proposed efficient design strategies of fuzzy logic controllers to synchronize different chaotic systems with adjustable constant forces in 2011.
Inspired via Prof. Yau and Shieh, in this article, we aim to propose an alternative design of fuzzy logic controllers subject to Lyapunov stability theory with hieratical structure, which also constructs the fuzzy if–then rules according to the control Lyapunov function with quadratic form. The error derivative is set as the antecedent part, and the corresponding control input is considered to be the consequent part in the development of the fuzzy if–then rules. Via detecting the real-time sign of error states, the boundary values of the error derivatives are applied to be the control forces to further lead the error dynamics to achieve asymptotically stable. The proposed fuzzy logic controllers are simple constants, and the design procedure can be applied to different kinds of control systems. More importantly, more concise control forces are developed in the fuzzy if–then rules to enforce systems tracing the correct trajectory effectively.
The rest of this article is organized as follows: In section “Materials and Methods,” the control scheme as well as control flowchart are introduced. In section “Results and discussion,” simulation results and comparison are given, and in section “Conclusion,” a brief description of conclusion is provided.
Materials and methods
Chaos control scheme
Consider the following nonlinear system with n order

where
The goal system which can be either chaotic or regular is

where
In order to enforce the control system states x to trace the trajectory of the goal system states y with real-time control inputs, we define the error states as

From equation (3) we have the following error dynamics

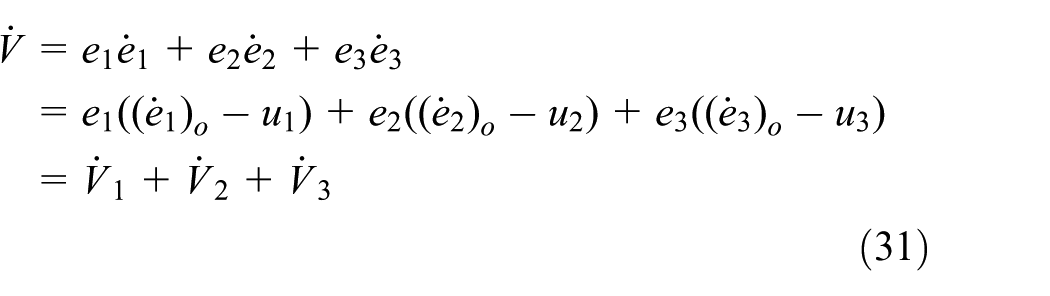
According to Lyapunov second stability theorem, we have the following control Lyapunov function with quadratic form to further derive the fuzzy logic controllers

where em = ym —xm represents any error state in the designed Lyapunov function in equation (5) and Vm = (em) 2 /2 refers to each subspace of the Lyapunov function. The derivative of the Lyapunov function can be described as follows

If the controllers included in
Design procedure of fuzzy logic controllers
FLC system considers a number of system boundary situations and designs the corresponding control strategy following the domain knowledge and design experience from experts, which generates the associated fuzzy if–then rules and membership functions. The fuzzy rules base consists of collection of fuzzy if–then rules expressed as the form if a is A and then b is B, where “if a is A” is the antecedent part and “b is B” is the consequent part; a and b denote linguistic variables and A and B represent linguistic values which are characterized by membership functions.
We use the error derivatives

Assuming the upper bound and lower bound of
If



If



If



where

Design of membership functions for each situationof
For each case,
The fuzzy rule base is listed in Table 1, in which the input variables in the antecedent part of the rules are
Rule table of FLC.
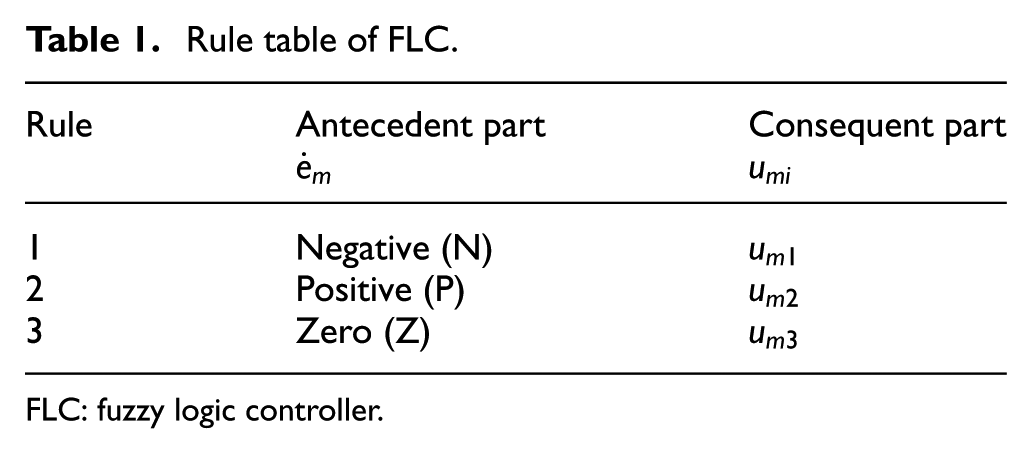
FLC: fuzzy logic controller.
It is worth to mention that for equations (9) and (12), the control forces are designed to be zero, it is because the subspace of derivatives of Lyapunov function has satisfied the condition of negative definite
Results and discussion
In this section, two simulation examples are illustrated to investigate the performance of the proposed control scheme. In Example 1, two identical nonlinear systems with different initial conditions as well as different parameters are proposed, in which the design process of fuzzy logic controllers is revealed and explained step by step. Furthermore, in Example 2, control of two different nonlinear systems with distinct structures is studied, which indicates that we can use the same process to design the fuzzy logic controllers achieving various kinds of control goals.
Example 1
Two identical systems with different settings
Consider the following classical Lorentz system in equation (18) as the goal system

where y1, y2, and y3 are state variables and a, b, and c are system parameters. When the initial conditions and parameters are set to be (y10, y20, and y30) = (0.1, 0.2, and 0.3) and a = 10, b = 8/3, and c = 28, chaotic behaviors appear, which are shown in Figure 2.

Phase portrait of the classical Lorentz system.
Also, the classical Lorentz system with FLC input is given below in equation (19)

where a1, b1, and c1 are system parameters, which are set to be different from those of goal system to show the effectiveness and feasibility of the proposed control scheme, a1 = 8, b1 = 8/3, and c1 = 10. The initial conditions are designed as (x10, x20, and x30) = (10, −10, and 10), and u1, u2, and u3 are fuzzy logic controllers.
Following the control scheme mentioned in section “Materials and Methods,” the error dynamic system can be obtained as follows

Equation (20) can be further rearranged into the following simple form

where

According to the control scheme, it is necessary to figure out the information of upper bounds and lower bounds of the original error dynamics in order to design the appropriate membership function to adjust the control forces more flexible, and the related information is investigated in Figure 3.

The ranges of the original error dynamics.
In Figure 3, the upper bounds and lower bounds of the original error dynamics are given, which can be described as

where Z1 = 200, Z2 = 400, and Z3 = 400, which is considered to be the boundary values of control force adjusted by the fuzzy logic weighting (membership functions).
In order to design fuzzy logic controllers, the derivative of Lyapunov function in equation (22) is divided into three subspaces

where

According to the design procedure of fuzzy logic controllers described in section “Materials and methods,” for

where

The simulation results are shown in Figure 4, where the fuzzy control inputs are operated after 30 s. Obviously, the fuzzy if–then rules created in our control scheme can lead the error dynamics to be asymptotically stable.

The time history of error states with fuzzy logic controllers.
Comparing to the previous study by Li, 19 the proposed method in this article has less redundant control forces, which effectively reduces the chance that unnecessary control force leads the sate trajectories (approaching to the original point) to jump outside the region of Lyapunov-sense stability; in addition, the simulation results give a strong evidence that the control performance of the proposed method is as good as the results of Li, 19 and the comparison is shown in Figure 5.

The time history of error states with fuzzy logic controllers in Li 19 and in this article.
Example 2
Two different nonlinear dynamic systems
Chen and Lee 20 presented a new chaotic system in 2004, which is now called Chen–Lee system. The system is described by the following nonlinear differential equations and denoted as the goal system

where z1, z2, and z3 are state variables, and a2, b2, and c2 are system parameters. When the initial conditions and parameters are set to be (z10, z20, and z30) = (0.5, 0.7, and 1.5) and (a2, b2, and c2) = (5, −10, and −3.8), system equation (28) is a chaotic attractor as shown in Figure 6. It is clear that the Chen–Lee system is a regular chaotic system.

Phase portrait of the Chen–Lee system.
Also, the classical Lorentz system with the corresponding FLC input in equation (19) is considered to be the control system. Following the control scheme mentioned in section “Materials and methods,” the error dynamic system can be described as follows

where

Choosing Lyapunov function with quadratic form, we have the following Lyapunov function derivatives
where

In order to design the appropriate membership function to adjust the control forces more flexible, the information of upper bounds and lower bounds of

The ranges of the original error dynamics.
The information of the upper bounds and lower bounds of the error derivatives are given in Figure 7; however, the ranges of the error derivatives are large in this case, so that the control forces Pm should be set to be very strong, which is not a benefit to control systems, especially for those mechanical or electrical systems. As a consequence, in this case, we consider to capture the boundary information of the error derivatives after 50 s (operation time), which brings us the steady error states of the two chaotic systems. The simulation results are given in Figure 8, and it is clear to show that the trajectories of the error derivatives are limited to smaller ranges.

The modified ranges of the error derivatives.
In Figure 8, the upper bounds and lower bounds of the original error dynamics are given, which can also be described as

where Z1 = 500, Z2 = 500, and Z3 = 500, which is considered to be the boundary values of control force adjusted by the fuzzy logic weighting (membership functions).
According to the design procedure of fuzzy logic controllers described in section “Materials and methods,” for

where

The simulation results are shown in Figure 9, where the fuzzy control inputs are operated after 50 s (which is more reasonable to control the dynamic systems under steady states). Obviously, the fuzzy if–then rules created in our control scheme can lead the error dynamics to be asymptotically stable.

The time history of error states with fuzzy logic controllers.
In this example, control of different nonlinear systems through the proposed control scheme is discussed, which try to demonstrate that the control scheme is feasible to different kinds of control goals. Following the same design process, the control targets can be achieved without considering those system properties, different structure of states equation, and so on. Moreover, those redundant control forces are further removed, and through the delay-controlling process, effective as well as economic fuzzy control forces can be obtained to achieve the control goal.
Conclusion
A Lyapunov-sense fuzzy logic controller with adjustable constant force is discussed in this article. Through the analysis of real-time status of error states, an error derivative–based FLC system is constructed. The error derivative is designed to be the antecedent part, and the corresponding control input is considered as the consequent part, and the boundary values of the error derivative are used to be the feedback control force in each fuzzy if–then rules; with the blending of each control force via the defuzzification process, the expressing strength of the proposed fuzzy controller can be adjusted to be a more appropriate control force leading the error dynamics to achieve asymptotical stability. The proposed fuzzy logic controller is a simple, convenient, and more flexible design, and the redundant forces in the constructed fuzzy rules are reduced. Simulation results demonstrate the effectiveness and feasibility of the proposed method.
Footnotes
Acknowledgements
The authors would like to thank anonymous reviewers for their valuable suggestions and comments to improve this article.
Handling Editor: Stephen D Prior
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded in part by the Ministry of Science and Technology (MOST 106-2221-E-027-028, 105-2218-E-027-005, 104-2622-E-027-003-CC2, and 105-2221-E-027-068 and 106-222-1-E-027-009).