
Abstract
In this article, a reduced-order extended state observer is proposed to deal with uncertainties and disturbances in tracking control for a one-degree-of-freedom manipulator pneumatic system. A tracking differentiator is designed to generate a smooth tracking signal and a corresponding differential signal of the reference input. A non-linear state error feedback is adopted to ensure the response rapidity and control precision. Furthermore, stability analysis of the proposed reduced-order extended state observer and the closed-loop system is also presented. Finally, the experimental results show the efficiency of the proposed scheme for the one-degree-of-freedom manipulator pneumatic system.
Keywords
Introduction
Pneumatic systems have been increasingly used in automation industry in recent years. Since pneumatic systems provide a lower cost, more flexible, and safer alternative to electric motors and actuators, pneumatic field has drawn a lot of attention 1 and has been widely used in many fields.2–5 Especially in pneumatic robots, the flexibility of dexterous robot hands plays an important role in space exploration, industrial manufacture, service robot industry, and other fields. Due to gripping characteristics of low cost, safety operation, cleanliness, and high power–weight ratio, pneumatic artificial muscles (PAMs) are popular in robotic applications. 6 With the rapid development of networks and computer technologies, networked control systems have attracted a lot of attention.7–9 PAMs are also considered as a pneumatic manipulator in networked control systems. 10 Nevertheless, it is difficult to obtain good performance of control accuracy in PAM systems for the existence of highly non-linear and time-varying dynamics caused by elasticity of PAMs and compressibility of air. In order to deal with those problems, various control strategies are put forward to improve the performance of the PAMs, such as proportional–integral–derivative (PID) methods, adaptive control laws, and sliding mode approaches. An adaptive robust control strategy is proposed to achieve precise posture trajectory tracking control for a three-pneumatic-muscle-driven parallel manipulator. 11 A switching algorithm using learning vector quantization neural networks is proposed to optimize the control performance of a pneumatic muscle manipulator. 12 A sliding mode controller is designed to increase the robustness of robotic manipulator tracking systems. 13 A novel non-linear PID controller enhanced by neural networks is introduced to improve the control performance of 2-axis PAM manipulator. 14 An integrated intelligent non-linear control method is presented for a PAM to realize good control performance by effective compensation. 15 An adaptive neural network (NN)–based decentralized control scheme with the prescribed performance is proposed for uncertain switched non-strict-feedback interconnected non-linear systems. 16 However, the above studies do not deal with the dynamic uncertainties, transition processes, and stability analysis directly, which motivates us to study a much effective scheme.
Active disturbance rejection control (ADRC), which is effective for a wide range of non-linear systems that have large uncertainties, was proposed by Jingqing Han in the late 1990s. Those uncertainties, including internal model dynamics uncertainties and external disturbances, can be estimated by an extended state observer (ESO) in real time. 17 Note that the ADRC has been successfully implemented on many uncertain systems, such as flywheel energy storage systems, 18 pneumatic cylinders, 19 motor systems, 20 micro-electro-mechanical systems (MEMS), 21 metal composite actuators, 22 chemical process control systems, 23 thermal plant control systems, 24 and ALSTOM gasifier system. 25 A typical ADRC consists of a tracking differentiator (TD), an ESO, and a feedback controller. The TD is designed to track an input signal and generate its differential signal in order to avoid overshoot. 26 Weak convergence has been shown for a high-gain non-linear TD based on finite-time stable systems. 27 The ESO is a key component in the ADRC approach and is used to observe state variables online and estimate total disturbances. Because of the good properties of estimation and capacity to compensate, ESOs have been widely used in many complicated uncertain systems, such as hypersonic vehicles, 28 permanent magnet synchronous motor (PMSM) servo systems, 29 multi-agent systems, 30 and spacecraft formation systems. 31 Besides non-linear ESOs, there also exist other ESO structures. A kind of linear ESOs for non-linear time-varying plants is proposed, and a complete stability analysis of the proposed linear ESO is also presented in Zheng et al. 32 Moreover, reduced-order ESOs have been proposed and discussed in Shao and Wang. 33 Although various kinds of ESOs have been developed for a wide range of applications, there are still some pending problems on tuning parameters and stability analysis.
In this article, a feedback controller, which compensates for the total disturbances by a reduced-order ESO, is designed to stabilize pneumatic manipulator systems. The main contributions of this article are summarized as follows:
An application of a TD avoids the overshoot and smoothens the transition process for the one-degree-of-freedom (DoF) manipulator pneumatic system.
A reduced-order ESO is implemented to estimate and compensate for the total disturbances. The lower the model order is and the fewer the parameters are, the easier the stability analysis and parameter tuning are.
A non-linear feedback controller combined with compensation of disturbances is designed to guarantee a satisfying performance of the closed-loop manipulator pneumatic system.
Experimental setup and system model
Experimental setup
In this article, a 1-DoF manipulator system, which is illustrated in Figure 1, driven by McKibben-type PAMs is considered. Moreover, analog output and collection cards are installed in an industrial control computer, and air with a certain pressure is produced by an air compressor, which passes a pneumatic filter regulator lubricator (FRL) into pressure proportional valves. The accessary components are listed in Table 1. Meanwhile, the schematic diagram of the 1-DoF manipulator system is depicted in Figure 2.

The experimental setup of the 1-DoF manipulator system driven by PAMs: (a) experimental setup and (b) 1-DoF manipulator system.
Experimental setup.

FRL: filter regulator lubricator; PAM: pneumatic artificial muscle.

The schematic diagram of the 1-DoF manipulator system.
Model of PAMs
PAMs, despite the existence of many variants, have some common features, such as they have a closed volume and are dependent on contraction of the mesh grid fiber to produce huge pulling force and displacement. Many works have been done on the structure and the mathematical model of PAMs.34,35 A McKibben PAM is considered for our study. The three-dimensional (3D) structure of its mesh grid fiber and the structure of its rubber tube are illustrated in Figure 3; the two-dimensional (2D) structure of its mesh grid fiber is shown in Figure 4.

3D structure of the mesh grid fiber and rubber tube.
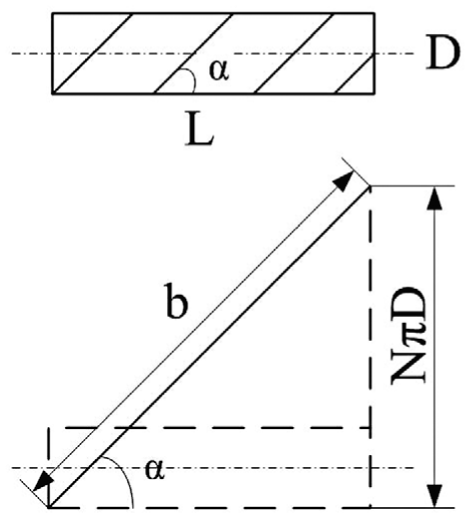
Structure of the mesh grid fiber.
In Figure 4, L denotes the actual length of the PAM, D is its diameter, b is the total length of rayon, N is the winding number of rayon, and

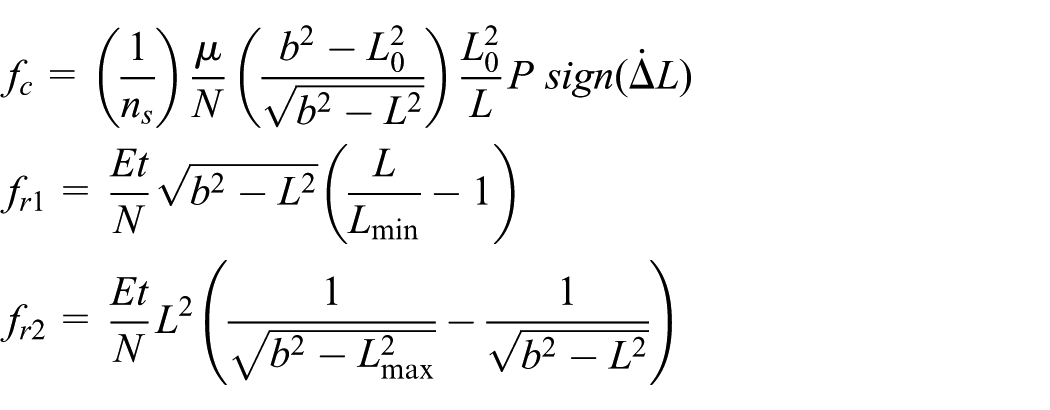
Based on the analysis in the literature,32,33 the output force

where V is the approximate operating volume of PAM.
By considering the non-linearities caused by uncertain parameters, elastic forces of the rubber tube, and the friction, equation (2) is further formulated as follows

where
where
System model
A dynamical model of the 1-DoF manipulator is described as follows

where

System (4), which is with the double inputs

where
Substituting equations (3), (5), and (6) into equation (4) and then ignoring the high-order terms of its Taylor series expanded at

where
The filter gain

where
Remark 1
The total disturbance is estimated and compensated by the proposed control method in this article. Therefore, the proposed control method in this article is not dependent on an accuracy model of the 1-DoF manipulator system. There is a little relationship between the range of the input signal and the accuracy of the model.
Controller design
In the rest of this work, an ADRC with a reduced-order ESO is designed to deal with the tracking problem for the PAM-driven 1-DoF manipulator system introduced in the previous section. The diagram of the designed control system is shown in Figure 5.

An ADRC system diagram of the 1-DoF manipulator system.
Design of TD
TD is designed to generate a smooth track of any input signal and its differential signal of reference input to arrange the transient process. The TD is usually implemented to preprocess the reference signal of control systems, aiming to avoid overshoot and optimize the system response. The TD is constructed as follows

where v is the input reference signal,

where
Design of a reduced-order ESO
The non-linear dynamics and uncertainties of the PAMs are regarded as a total disturbance. This disturbance is estimated by a reduced-order ESO. Considering equation (8), the term

where
In this section, a reduced-order ESO is designed to estimate the total disturbance which is produced by the non-linear and uncertain dynamics of the system. The reduced-order ESO for the 1-DoF manipulator system is given as follows
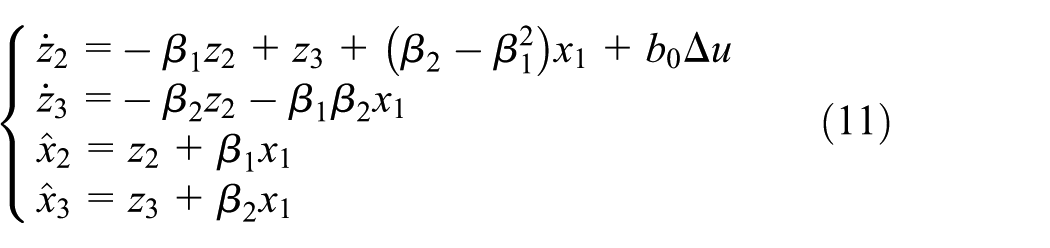
where

where

where
Compared to the traditional non-linear ESO (equation 12), the structure of the reduced-order ESO only contains the estimations of
Based on ESO (equation 11) and system description (equation 10), define

In the following, convergence analysis of system (14) is presented.
Theorem 1
Considering error system (14) and choosing suitable parameters for

and
Proof
Consider the following Lyapunov function

It is obvious that equation (16) is positive definite. The derivation of

Letting

Let

then

there always exists a suitable parameter
Moreover, it is obvious that

Wrapping up the aforementioned analysis yields a conclusion that
Design of a non-linear error feedback controller
In order to stabilize the closed-loop pneumatic system, a non-linear feedback controller with the ability to cancel the total disturbances is introduced in this section. The controller is designed as follows

where

For this closed-loop system, errors between the given signal and output signal are written as

Therefore,

where
Theorem 2
The closed-loop system (22) is asymptotically uniformly stable by the reduced-order ESO (equation 11) and the error feedback controller (equation 19) with two properly tuned controller gains
Proof
A Lyapunov function for the closed-loop system (22) is given as follows

Then the derivative of V is as follows

Letting
If
If
Moreover, considering the expression
If
If
If
If
Define

Therefore, it is obtained that

Due to the guaranteed convergence of the reduced-order ESO, both

Then M is also bounded. Therefore, the following expression holds with a large enough k

Because equation (23) is positive definite, and its differential is negative definite, the closed-loop system (22) is asymptotically uniformly stable.
Experimental results
An ADRC system combining the aforementioned TD (equation 9), the reduced-order ESO (equation 11), and the non-linear controller (equation 19) is written as follows

Based on the designed controller, comparisons of experimental results between the reduced-order ESO and a traditional non-linear ESO are shown in Figures 6 and 7. Note that more information on the traditional non-linear ESO has been described in Ahn and Nguyen. 12

Comparison of experimental results for tracking a step signal at
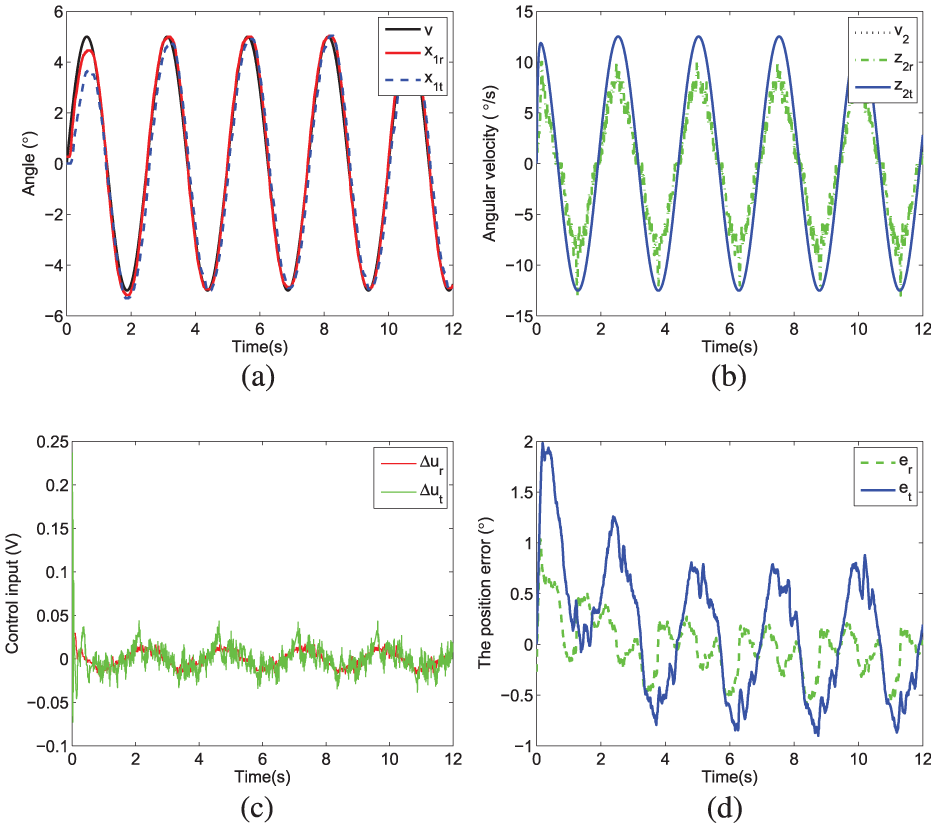
Comparison of experimental results for tracking a sinusoidal signal at
Figure 6 shows the comparison of results between the reduced-order ESO and a traditional non-linear ESO for tracking a step signal at
Figure 7 shows the comparison of results between the reduced-order ESO and the traditional non-linear ESO for tracking a sinusoidal signal at
In conclusion, based on the same TD and a feedback controller structure, it is easily known that the reduced-order ESO has an advantage on response speed and tracking steady-state error compared with the traditional non-linear ESO. That is, the reduced-order ESO has a better performance than the traditional non-linear ESO based on ADRC for a 1-DoF manipulator system.
Remark 2
In Figure 6(b) and (c), there are some spikes in the initial response position because
Conclusion
In this article, a reduced-order ESO based on ADRC is proposed to deal with uncertainties in tracking control for a 1-DoF manipulator pneumatic system. A TD has been designed to get a corresponding smooth signal of a given input signal to avoid overshoot and a differential signal as well. Moreover, a non-linear error feedback controller has been adopted to guarantee a satisfying performance. Stability analysis of the reduced-order ESO and the closed-loop system has been proven by Lyapunov theory. Finally, the experimental results exhibit the efficiency and advantages of the reduced-order ESO with an ADRC method for the 1-DoF manipulator driven by PAMs.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers for their detailed comments which helped to improve the quality of the paper.
Handling Editor: Xianzhi Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Natural Science Foundation of China under grant nos 51375045 and 51505413 and the Hebei Provincial Natural Science Fund under grant no. E2016203264.