
Abstract
We propose in this article a new isogeometric Reissner–Mindlin degenerated shell element for linear analysis. It is based on the mixed use of non-uniform rational basis spline and Lagrange basis functions in the same domain. The mid-surface of the shell is represented and discretized using non-uniform rational basis spline and the directors of the shell are discretized using Lagrange polynomials. The interpolatory property of Lagrange polynomials gives a natural choice of fiber vectors, thus removing the difficulties in the definition of directors that is seen in most isogeometric Reissner–Mindlin shell elements. The non-uniform rational basis spline representation of the mid-surface allows us to maintain the exact geometry representation characteristic of the isogeometric approach. The independent expressions of displacements and rotations also give users the possibility to use different numbers of degrees of freedom in an element for both kinematic variables. Several numerical examples show that our method is simple, robust, and efficient.
Keywords
Introduction
Isogeometric analysis (IGA) is an analysis tool introduced by Hughes et al. 1 and further developed by Bazilevs et al.2,3 and Cottrell et al. 4 Basis functions which are traditionally used in computer-aided design (CAD) are introduced into the analysis, geometrically exact representation of the calculation domain and simple mesh creation can thus be easily obtained. IGA has found its application in various fields like electromagnetics, 5 contact mechanics,6,7 fluid mechanics, 8 and fluid–structure interaction.9,10
Shell structures are frequently used in engineering applications like in automotive and aerospace industry as well as in civil engineering due to their high ratio of load-carrying capacity to self weight. The main two shell models used in engineering are Kirchhoff–Love (KL) and Reissner–Mindlin. The former is used for thin-shell analysis, and the latter is applicable for both thin and thick shells, for it accounts the shear deformation. For a deep knowledge of various shell theories, the interested reader can refer for example to Bischoff et al. 11
Isogeometric shell analysis is a combination of traditional shell models and IGA approximation method. Various IGA shell models12–21 have been developed. For KL shell model, the basis functions need at least
In KL shells, the deformation of the shell is expressed by the displacements of the control points. The dimension of the stiffness matrix is relatively low compared to Reissner–Mindlin shells, this makes it very efficient especially when solving non-linear problems where many iterations are needed. 15 On the other side, the lack of rotational degrees of freedom renders the imposition of rotational boundary conditions difficult. The computational complexity is also higher than the later at the element level, since it involves second-order derivatives of the basis functions.
As for Reissner–Mindlin shells, Uhm and Youn 20 proposed the first T-spline/NURBS-based IGA Reissner–Mindlin shell using a degenerated method. Benson et al. 13 implemented an isogeometric NURBS-based Reissner–Mindlin shell within the commercial software LS-DYNA. Dornisch et al. 17 improved the calculation and update of directors within isogeometric Reissner–Mindlin shells. It is based on a geometrically exact shell theory and is applicable for both linear and non-linear analysis. Benson et al. 15 introduced a blending method in the same analysis of their two shell models13,14 for computational efficiency purposes. Based on the KL shells, Echter et al. 16 introduced, by elegantly superposing difference vectors, a shear locking-free Reissner–Mindlin shell element and a shell-solid element. The remaining locking phenomena are removed using standard approaches, providing locking-free shell formulations. Finally, Hosseini et al. 18 and Bouclier et al. 19 introduced isogeometric solid shell elements. Kiendl et al., 22 Duong et al., 23 and Roohbakhshan and Sauer 24 incorporated general material models into KL shell formulation. It enables the KL shell to be used in more scenarios, such as modeling the inflatable structures and soft biological tissues. Oesterle et al. 25 proposed an interesting rotation-free shear deformable shell elements which allows for transverse shear effects. It intrinsically avoids shear locking through the innovative use of “shear displacements” instead of fiber rotations. Another locking-free shear deformable shell formulation proposed by Oesterle et al. 26 achieved the same goal using hierarchically added linearized transverse shear components. There are also shell formulations which emphasis on the composite thin-walled structures27–30 and the coupling between shell patches.31–34
The definition of fiber vectors (directors) is an important problem specific in IGA Reissner–Mindlin shell analysis. Due to the non-interpolatory nature of the NURBS basis functions, there is no natural way to define “nodal” fiber vectors in IGA. Uhm and Youn 20 obtained fiber vectors using the nearest projection of the control points onto the NURBS surface. The procedure consists of finding the nearest corresponding points on the surface and then defining the corresponding control point director as the normal vector at those projected points. Dornisch et al. 17 obtained fiber vectors by solving a linear equation in order to make the axis of local coordinate systems in the quadrature points exactly equal with those obtained by a NURBS interpolation. It should be noted that either the nearest point projection or forming/solving the equation in the latter method will cost additional computer resources.
From our point of view, the fiber vectors can be viewed as another interpolated field whose reference points are fiber vector nodes. The difficulty encountered in the above shell formulations may be due to the use of NURBS in the expression of the director field that makes the users spend additional computational effort to find these director points which can give better surface normal interpolation accuracy. In this article, we circumvent this problem by replacing NURBS with Lagrange basis functions for the expression of the director field. The NURBS representation of the shell mid-surface is kept unchanged. As a result, the movements of the mid-surface will be expressed with NURBS basis functions, and the rotations of the fibers will be expressed with Lagrange basis functions. It indicates that we use two heterogeneous grids in the analysis simultaneously. Thus, it is named “mixed grid” approach. This strategy enables the users to use different numbers of degrees of freedom for displacements and rotations in a single element. Another advantage is that the rotational boundary conditions can be easily applied. We have adopted the similar idea in our previous article. 35 There, the main concerns are the shear-locking phenomenon and its proper reduced quadrature method. Here, we will thoroughly study the effects of different NURBS and Lagrange basis order combinations on the simulation results.
This article is organized as follows: In section “Formulation of shell model,” the formulation of the degenerated shell element and its implementation with IGA and mixed grids are stated. In section “Numerical examples,” several examples taken from the literature are considered, and results of the proposed approach are compared with already published isogeometric shell elements. In section “Conclusion,” we draw conclusions.
Formulation of shell model
Degenerated shell model
The degenerated shell approach is widely used in shell analysis for its simplicity. The idea is to discretize the shell into solid element and then use linear shape functions in the thickness direction. After simplifications, the geometry of the shell will be expressed with a parametric mid-surface and an interpolated fiber vector will indicate the thickness direction. Correspondingly, the kinematics of the geometry will be expressed by the translations of mid-surface nodes and the rotations of the fiber vectors. The detailed procedures can be seen in Hughes 36 and Zhu et al. 37 In this section, we briefly review standard results to introduce the notations and present some changes that are suited to detail our approach. The interested reader is encouraged to read Hughes 36 and Zhu et al. 37 for further details.
The geometry of the shell can be expressed after simplification using the following equation

Here,
The kinematics of the shell is expressed as follows

where

where

The number of nodal rotation parameters is reduced to two, and the commonly used five degrees of freedom Reissner–Mindlin shell formulation is obtained. This article discusses the linear small deformation circumstances; therefore, the linear strain tensor is used

The strain energy is classically obtained using the following expression

The stiffness matrix is finally obtained from the following expression

In order to modify the material tensor to reach the zero normal stress condition and calculate the integrant in equation (6), the material tensor will be expanded in a so-called lamina coordinate system, so as the strain tensor. One way to do so is to follow Hughes 36





The lamina coordinate axis will therefore be


And the transformation matrix from the global coordinate system to the local one will be

The strain tensor






where h is the thickness of the shell. If the shell thickness is varying, it should appear as
Finally, the contribution of a given quadrature point to the stiffness matrix is

where
Isogeometric approximation with mixed grid
IGA uses the basis functions which are used in computer graphics and animation for analysis. This idea was first introduced by Hughes et al. 1 using NURBS basis functions in the analysis. Following the success of this initial work, a lot of basis functions which are formerly used in CAD are used in IGA to extend its possibilities, such as T-spline, 38 polynomial splines over hierarchical T-meshes (PHT) spline, 39 and Hierarchical B-spline (HB). 40 Considering that NURBS is the most common technology in the CAD society, we will use NURBS basis in this article. However, the extension to other basis functions mentioned previously is relatively straightforward. The definition of two-dimensional (2D) NURBS basis functions is as follows (see, for example, Piegl and Tiller 41 )

where
In IGA, once the description of the geometry is fixed, the coarsest mesh for analysis is obtained. After knot insertion and/or order elevation procedures, a finer mesh can be created without changing the geometry but only adding more basis functions and control points. This procedure is referred to as mesh refinement in IGA.
1
The commonly used NURBS geometries in IGA are described by open knots vectors, which means that the first and end knots should appear
Introducing the basis functions of equation (24) into the shell model of the previous section, the isogeometric degenerated shell model can be devised. The starting point we consider here, as compared to what is done in finite element method (FEM) degenerated shells, is the definition of fiber vectors. Going back to the geometric description of the shell in equation (1) and considering a uniform shell, equation (1) can be rewritten as equation (25) and divided into two parts: the first one given in equation (26) is for the description of the mid-surface and the second one given in equation (27) is for the description of the director vectors



The entire geometry can be viewed as the superposition of the mid-surface and the director field (see Figure 1).

An example of
In traditional FEM, the fiber vectors

where

An example of second-order Lagrange (slash lines), second-order NURBS basis functions, and the Lagrange basis points positions (squares) in IGA elements [
It should be noted that the Lagrange basis points are uniformly distributed in each IGA interval. Consequently, the value of the Lagrange basis function and their derivatives only need to be evaluated once in the isoparametric interval
Deriving the previous equations, the approximation of the deformation is also obtained using a combination of NURBS and Lagrange basis functions. The displacement of the shell given in equation (2) can be rewritten as

Following the derivation of the equation given in section “Degenerated shell model,” one can easily see that the expressions given in equations (20)–(22) are unchanged as long as the appropriate basis functions are used. That is, the NURBS basis functions N are used in equation (20), and the Lagrange basis functions
Numerical examples
Three benchmark problems from shell obstacle courses of Belytschko et al. 42 and one double-curved free-form surface example taken from Dornisch et al. 17 are used here to validate our method and compare it with other isogeometric shell elements. In all the examples, we considered NURBS basis functions of degrees 2–5 and Lagrange basis functions of degrees 2 and 3. Increasing the degree of the Lagrange basis function does not improve the results when considering NURBS up to degree 5 as we will see in the sequel. In all cases, we use regular meshes with {2, 4, 8, 16, 32} elements per edges.
Scordelis–Lo roof problem
The problem setup and its material properties can be seen in Figure 3. A gravity load

Scordelis–Lo roof problem setup.
Figures 4 and 5 show the results with h refinement with various NURBS orders. Figure 4 shows the results obtained using quadratic Lagrange basis functions. For quadratic NURBS

Scordelis–Lo roof,

Scordelis–Lo roof,
Pinched cylinder problem
Figure 6 depicts the pinched cylinder problem setup and its material properties. Due to symmetry only one-eighth of the system is modeled and sketched. This example has been used by Dornisch et al.
17
to compare their exactly calculated director IGA shell with the KL shell of Kiendl et al.
12
and the isogeometric Reissner–Mindlin shell of Benson et al.
13
The converged solution for the vertical displacement at point B is

Pinched cylinder with diaphragm problem setup.
Figures 7 and 8 depict the results obtained with h refinement with various NURBS orders. A similar behavior as for the previous example is observed. Figure 7 depicts the results obtained with quadratic Lagrange basis functions. The results of

Pinched cylinder,

Pinched cylinder,
Hemisphere shell problem
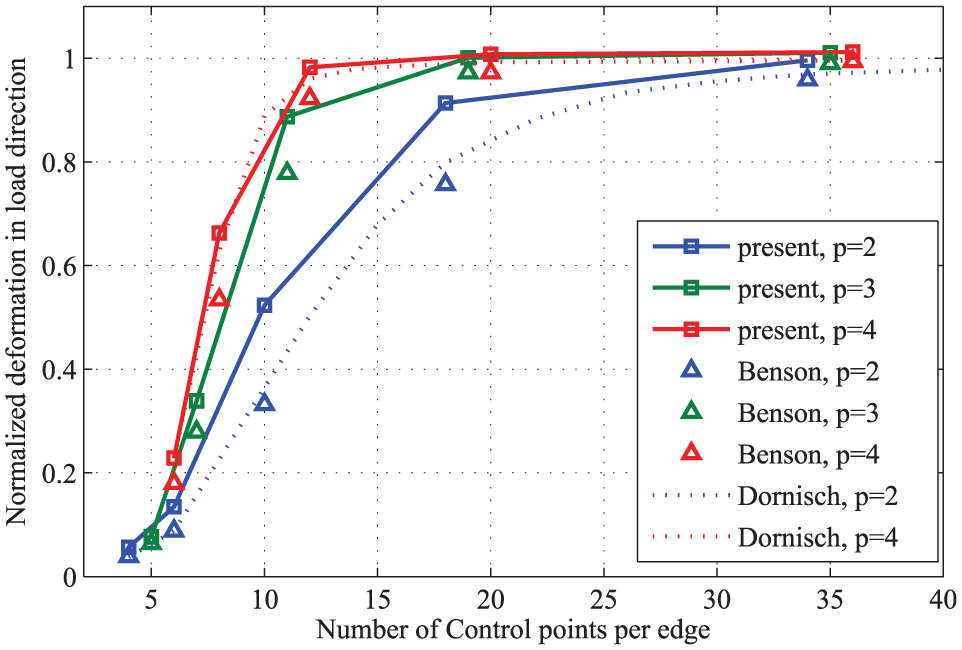
Figure 10 shows the hemisphere problem setup and its material properties. The quantity of interest is the horizontal displacement
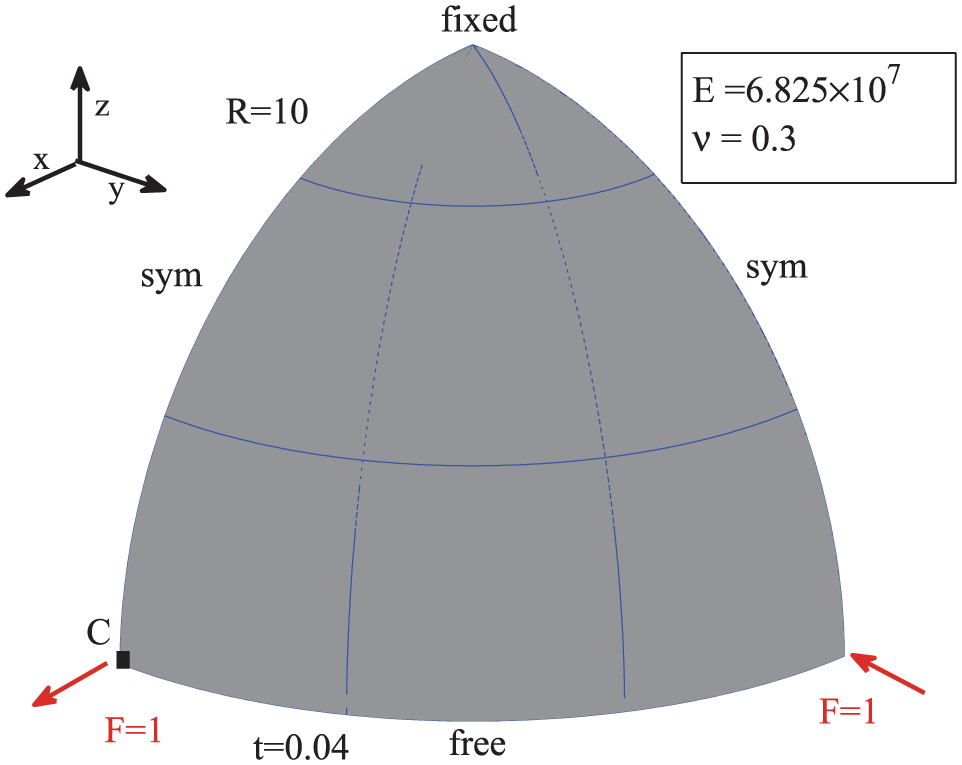
Hemisphere shell problem setup.
Hemisphere shell,

Hemisphere shell,
Double-curved free-form surface problem
This last example was designed by Dornisch et al.
17
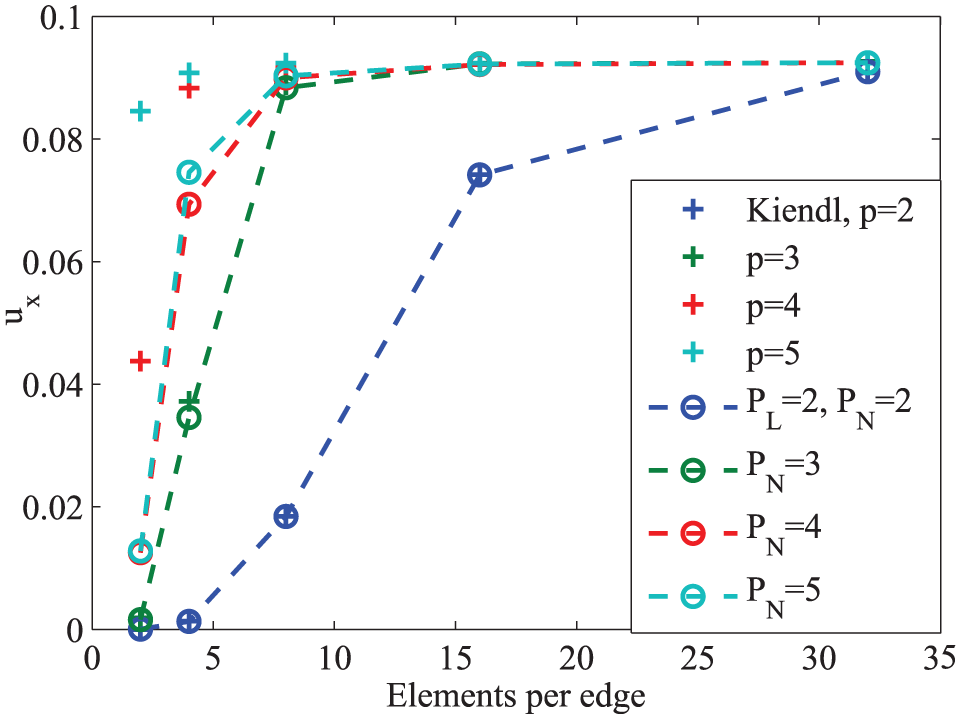
to test their exactly calculated director IGA Reissner–Mindlin shell. Figure 13 shows the problem setup and material properties. The initial geometry description contains
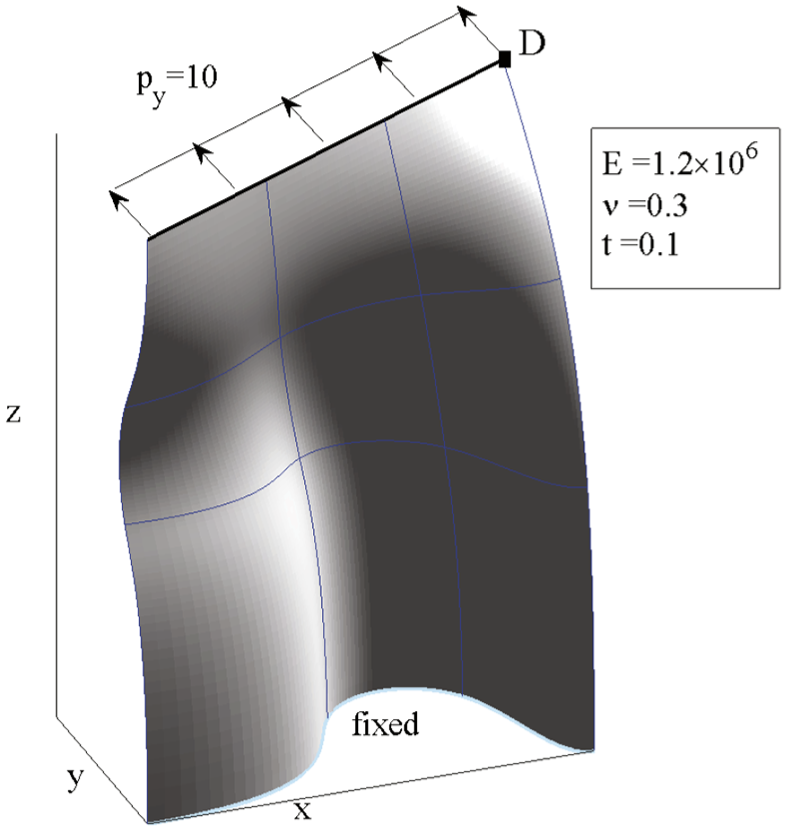
Double-curved free-form surface problem setup. Geometry data obtained from Dornisch et al. 17
Figure 14 shows the
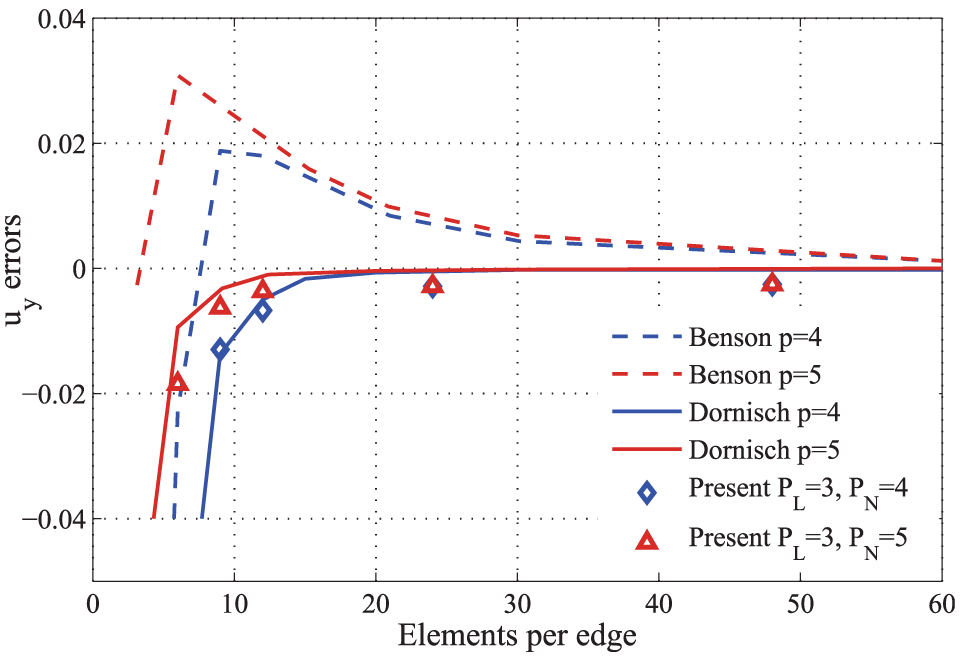
Double-curved free surface,
Discussions
The results of different combinations of NURBS order and Lagrange order basis functions formulations all converge correctly. The differences lie in their convergence rates. This indicates the applicability of the independent formulation of the displacements and rotations in IGA shell elements. There can be different numbers of rotational and translational degrees of freedom in an element.
Figure 15 depicts an empirical estimation of the convergence rate performances of

Combination of NURBS basis orders and Lagrange basis orders.
As for the calculation efficiency, although we simultaneously use NURBS and Lagrange basis functions in our formulation, the additional cost of calculating the Lagrange basis function is relatively low. It indicates that our approach does not need more time to get the element stiffness matrices compared with the standard IGA shell. But on the global scale, our approach often gives more degrees of freedom especially when high-order basis are adopted; consequently, more computer resources will be needed to solve the system equations. However, when considering the case where
Conclusion
In this article, we propose a new IGA Reissner–Mindlin shell formulation based on the mixed use of NURBS and Lagrange basis functions in the same domain. The use of NURBS basis functions to discretize the mid-surface of the shell keeps the geometry exact character of IGA analysis. The use of Lagrange basis avoids the determination of the director vectors commonly encountered in alternative IGA Reissner–Mindlin shell. Our method is a natural extension of standard degenerated Reissner–Mindlin shell, and it allows the use of traditional rotational boundary condition imposition technics, which is easier than that with full NURBS Reissner–Mindlin shells.
Our method does not need additional effort in the definition of fiber vectors, thus is easier to implement. It also allows the use of optimal or reduced quadrature rules, see for example, Hughes et al., 43 Auricchio et al., 44 and Schillinger et al., 45 which can further reduce the calculation cost and/or improve the performance. Considering that the quadrature requirements in IGA analysis is different from that in FEM, 43 new and general reduced quadrature strategies should be studied.
Footnotes
Handling Editor: Anand Thite
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fundamental Research Funds for the Central Universities (Grant Nos 300102258108 and 300102258201) and National Natural Science Foundation of China (Grant No. 51509006).