
Abstract
Recently, many mechanical components of vehicles are being replaced by electrical or electromechanical parts. This change leads to the reduced weight, higher fuel efficiency, and simpler diagnosis. In particular, a reliable and robust electromechanical brake control system has been focused. So, this article investigates that an application of brain limbic system–based control, a bio-inspired control strategy, to an electromechanical brake system is suitable for dynamic and uncertain driving conditions. To do this end, control parameters are optimized through genetic algorithm. Results show the effectiveness of the suggested control method in terms of control speed, reference tracking, and robustness to the disturbance.
Introduction
Recently, as the vehicle is getting more intelligent, it is expected that smart car system have enabled more safe and efficient driving. With increasing smart car, various sensors and actuators are essential for realizing these functions. In particular, the control performance of the vehicle parts is getting important. Many researches on X-by-wire (X includes brake, steering, and throttle) has been widely studied.1–12
Unlike conventional brake systems that generate braking force through hydraulic pressure, electromechanical brake (EMB) is a system in which many of the mechanical and hydraulic components are replaced with electronic ones. Such an automotive brake-by-wire system has been studied for decades. Line et al.
3
suggested a cascaded control to cope with a wide range of nonlinear friction load disturbances, one of the challenging issues in the conventional proportional–integral–derivative (PID) control. Their PI-based cascade control is consisted with a force controller, motor velocity controller, and motor current controller. Applying robust
The main contribution of this article is applying a bio-inspired control strategy to EMB system. As a baseline, PI-based cascade control performance has been carried out. Genetic algorithm (GA) optimization is applied to optimize brain limbic system (BLS) control parameters. In addition, extensive simulation demonstrated that the performances of newly proposed algorithms are effective in improving the performance of EMB control systems. This article is organized as follows: section “Electromechanical braking” and section “Conventional PI control strategy” introduce the electromechanical braking model and a conventional control method, PI-based cascaded control model, respectively. Sections “BLS-based control” and “BLS-GA control strategy” describe the BLS-based control and its application to EMB. In succession, the simulation results demonstrate the performance of the proposed control method and conclusion is presented in sections “Simulation results” and “Conclusion,” respectively.
Electromechanical braking
Unlike conventional brake system, the EMB is electronically connected between the brake pedal and the brake and uses electromechanical parts to generate brake pad clamping force instead of hydraulic system.3,7,9,10 As shown in Figure 1, the electric motor pushes the brake pads toward the brake disk and then generate braking force. To verify the performance of the proposed controller, the following EMB system model is adopted as follows3–5






where

Schematic of electromechanical brake.
Conventional PI control strategy
As a baseline, the PI EMB system controller is considered. To generate the desired brake pad clamping force, the EMB model and control structure are used from Line et al.3–5 as in Figure 2.

Cascaded control structure for EMB control.
The controller is consisted of the clamping force, motor speed, and motor current controller. Each PI sub-controller includes the inner most loop (the motor current), and control output is defined as follows

where

where

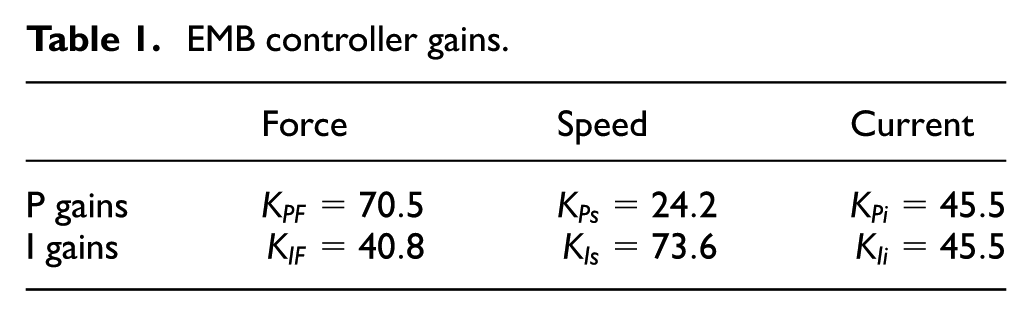
where control output, PI controller gains, and the force error are
EMB controller gains.
The simulation results of PI control are shown in Figure 3. To measure control performance, the 5% settling time,
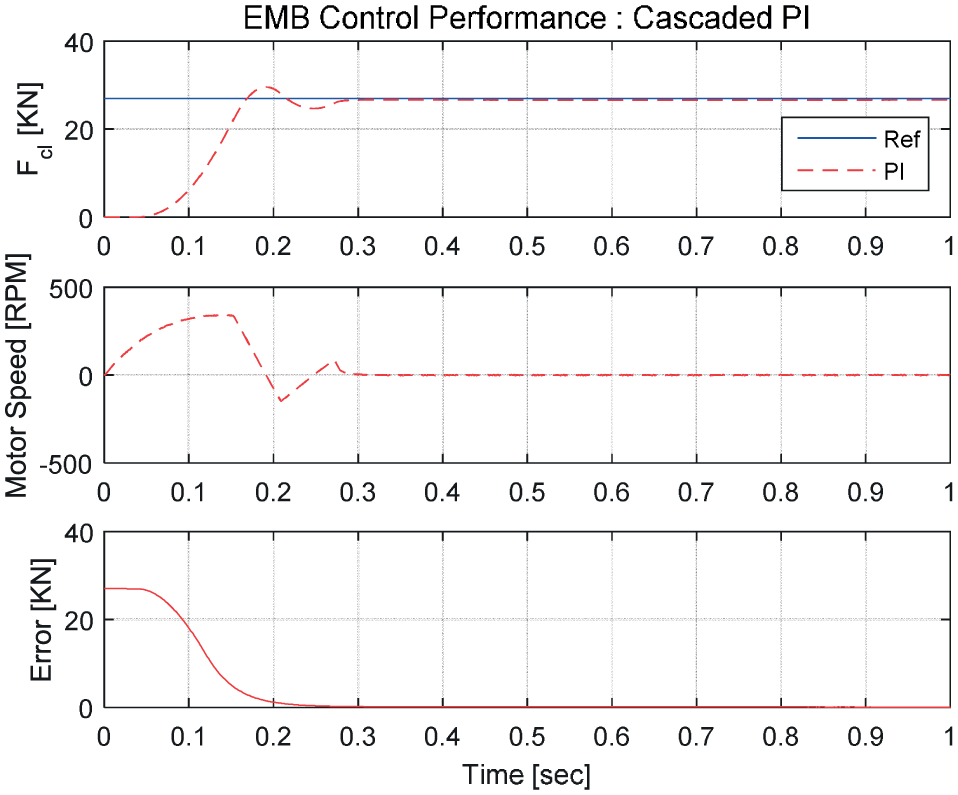
PI control performance.
BLS-based control
To improve the performance of the conventional control method, the BLS-based control was employed. The emotion-based behavior process occurs in the limbic system of the human brain. BLS consists of amygdala, orbitofrontal cortex (OFC), thalamus, and sensory cortex.
13
The sensing signal transmitted to the thalamus initiates learning process and let the signal transmitted to sensory cortex. The sensory cortex generates the sensory input (

A computational model of BLS controller.
Lucas et al. 15 brought this concept to the control engineering field first. The BLS-based control is a control strategy that mimics the emotional learning process occurring in the human brain, and by means of this learning process, the system can be controlled to achieve the desired goal. Equations (10)–(14) describe a simplified model of the process



where MO, SI, and EC represent the controller output, sensory input signal (
The final output of the suggested controller is the difference between amygdala and OFC as shown in equation (10). From the computational model, the amygdala constantly learns the relation between the sensory input signal and the emotional signal and tends to behave based on the learned connection. Furthermore, the OFC signal acts to prevent any inappropriate action that is originated by the amygdala. In this process, the amygdala learns the appropriate relations between neutral and emotionally charged stimuli while the OFC tries to inhibit inappropriate connections as the task is accomplished as shown in equations (4) and (5)


BLS-GA control strategy
To employ the biomimetic control method, some parameters and functions are well defined. Unfortunately, there is shortcoming that the systematic rules for defining these essential components of BLS controller do not exist. Like PID control scheme, the essential BLS components,


where

Genetic algorithm working flow. 17
In the framework of GA, optimization is conducted from the definition of the initial population. By means of fitness function evaluation, the highest value–obtained members are selected as next seeds. When the criterion does not meet the solution requirements, the successive generations are regenerated by reproduction, crossover, and mutation process to make better solutions. It is obvious that the larger population size number and generation number are a good approach to find the optimal solution. In order to optimize parameters, the objective function and fitness function are specified by


Characteristic parameters of the GA-based tuning.

Simulation results
In this section, the control performances of PI and GA optimized BLS are compared through simulations. After the clamping force tracking performances are investigated, the robustness of the proposed controller is observed as well considering the clamping force measurement error as a disturbance to the control system.
First, a constant clamping force tracking performances are compared. Targeting clamping force, 27 kN, is requested to the EMB to stop the vehicle. The reference tracking performance was presented in Figures 6 and 7. Figure 6 shows simulation results of without disturbance case, while Figure 7 displays the results under disturbance. Because accurate sensing of clamping force is impossible, 0.3% of sensing error is assumed and applied in the disturbance included simulations. Performance analysis shows that BLS-GA is faster and fewer steady-state error than PI control. The settling time is
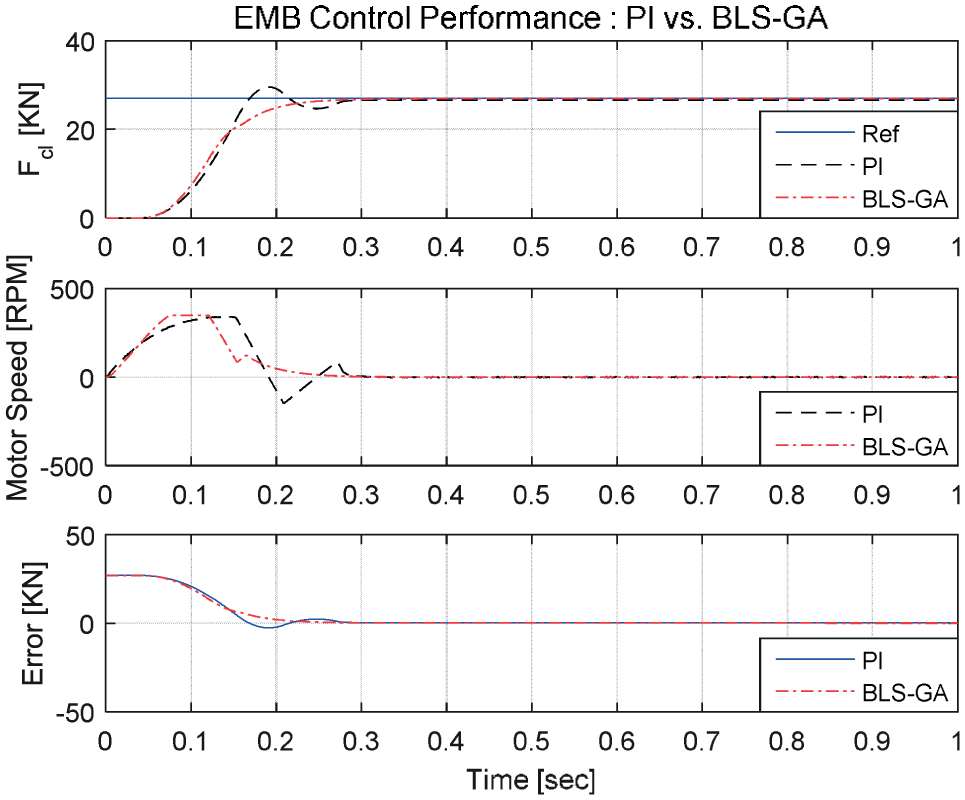
EMB control performance comparison (

EMB control performance comparison (
Table 3 shows the root mean square (RMS) of clamping force error of each control method. It is observed that the control performances are deteriorated considering sensor noise in both control methods. In both cases, the BLS-GA strategy has fewer RMS errors. This shows BLS-GA strategy better under disturbance case and suitable real EMB braking system that has clamping force measurement errors.
Control performance comparison.

Under sinusoidal signal–based clamping force, the target racking performance of suggested control algorithm is examined. During the simulation,
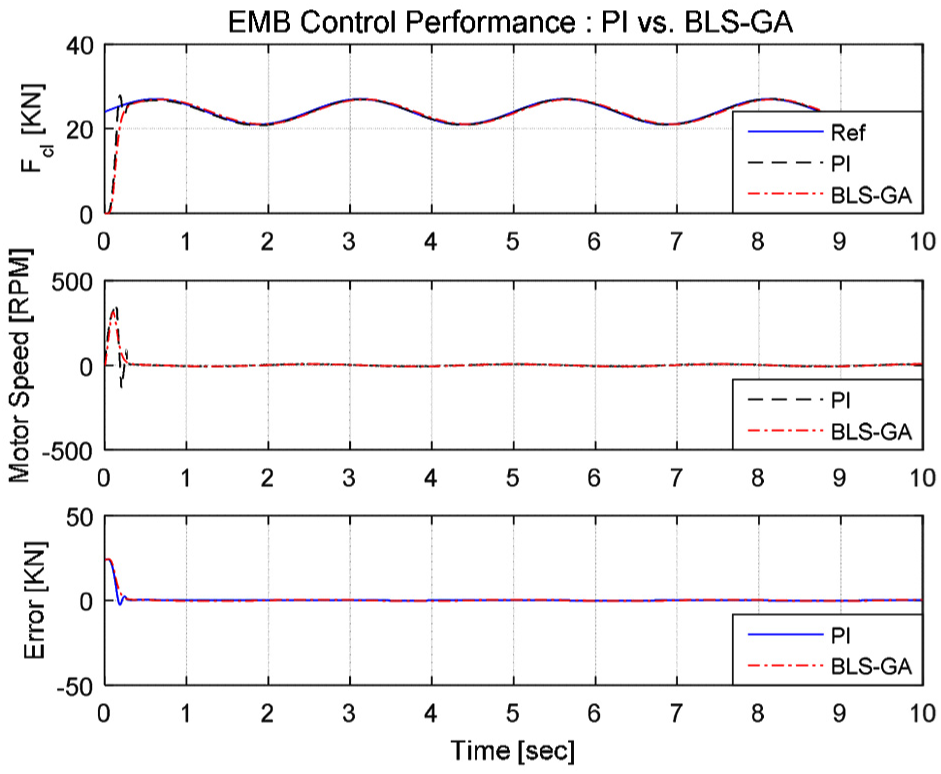
EMB control performance comparison (sinusoidal reference,
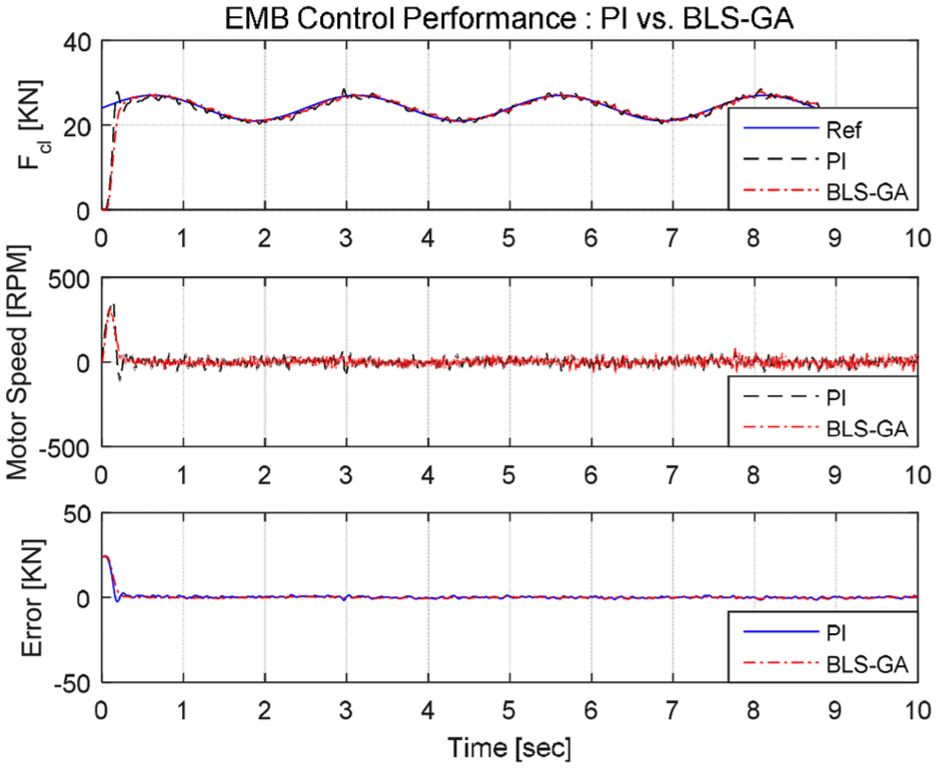
EMB control performance comparison (sinusoidal reference,
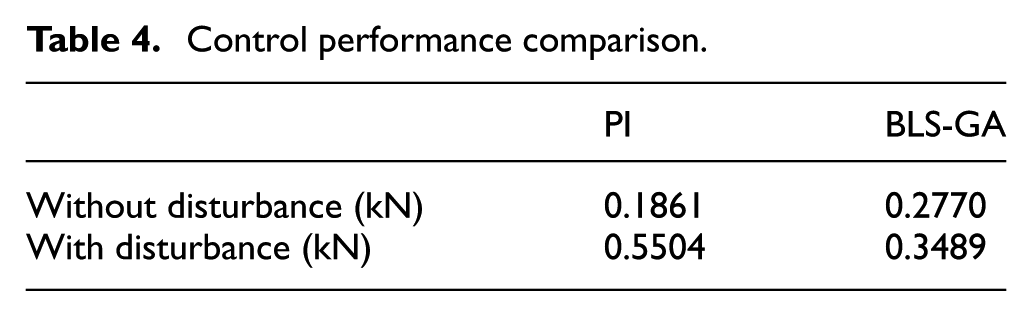
BLS-GA method shows larger RMS error than that of PI control under without sensor noise case when the target tracking error of control methods are compared as shown in Table 4. However, under disturbance case, BLS-GA shows superior performance having fewer RMS errors than PI and this demonstrates that BLS-GA has better control performance under real operational condition. In both simulation cases, the suggested control strategy has fewer RMS error for sensor noise (disturbance) and faster target tracking performance.
Control performance comparison.
Conclusion
In this article, a new control method for an EMB system was studied. As a bio-inspired control scheme, BLS-based control is introduced. In order to improve the performance of the suggested control method, GA-based parameter optimization is adopted. From the simulations, it is shown that the BLS-based control has fast and accurate performance than PI and the robustness of the BLS controller is demonstrated through sensor noise applied cases. This research was conducted with numerical simulations; the findings will be verified through experimental tests in the following research.
Footnotes
Appendix 1
Handling Editor: Alexander Hosovsky
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Kyungpook National University Research Fund, 2016.