
Abstract
In general, eccentric gravity machinery is a rotation mechanism with eccentric pendulum mechanism, which can be used to convert continuously kinetic energy generated by gravity energy to electric energy. However, a stable rotated velocity of the eccentric gravity machinery is difficult to be achieved only using gravity energy. In this article, a stable velocity control system applied to eccentric gravity machinery is proposed. The dynamic characteristic of eccentric gravity machinery is analyzed and its mathematical model is established, which is used to design the controller. A stable running velocity of the eccentric gravity machinery can be operated by the controlled servomotor. Due to disturbances being periodic, repetitive controller is installed to velocity control loop. The stability performance and control performance of the repetitive control system are discussed. The iterative algorithm of the repetitive control is executed by a digital signal processor TI TMS320C32 floating-point processor. Simulated and experimental results are reported to verify the performance of the proposed eccentric gravity machinery control system.
Introduction
Gravity power is a clean and natural energy from inherent characteristics of the earth. Therefore, gravity can be used to many industrial applications, such as puncher, gravity separation machine, and vibration machine. Nowadays, potential/kinetic energy can often be converted to electric power by eccentric gravity machinery (EGM). The converted efficiency of EGM depends on the stable velocity operation. However, without appropriate control system, large varying angular velocity of EGM can be easily generated. Therefore, in this article, a velocity control driven by servomotor is applied to EGM to improve the operated velocity stability. The disturbances of EGM produced from gravity/generator are periodic signals. Therefore, a repetitive controller is adopted to reduce the steady-state error.
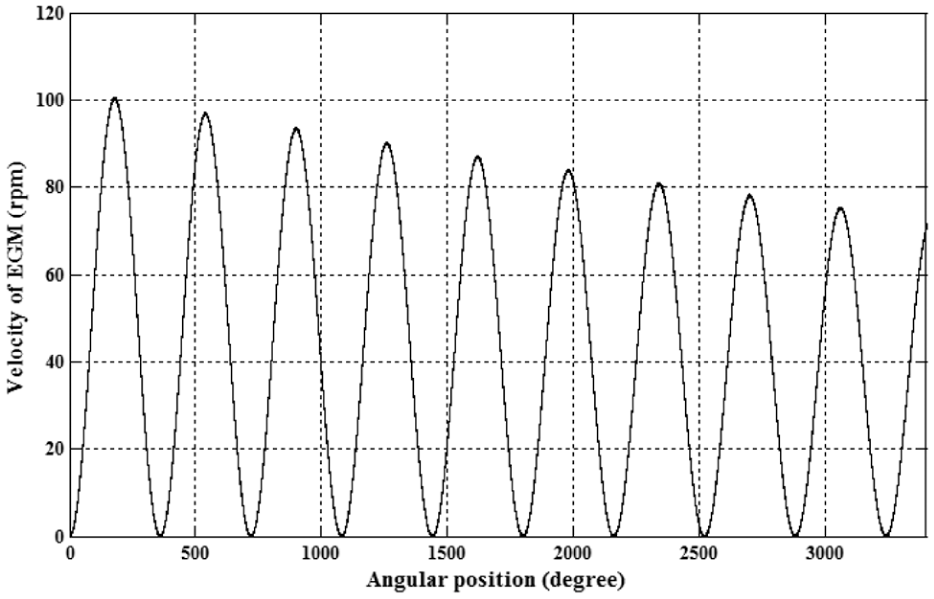
In this article, a prototype of EGM is constructed, which is composed of eccentric pendulum mechanism, servomotor, and generator as shown in Figure 1. The 40-kg eccentric pendulum mechanism is composed of flywheel (see Figure 2(a)) and planetary gear set (as shown Figure 2(b)), which is used to generate potential/kinetic energy from the gravity effect. The 1.5-kW servomotor (see Figure 2(c)) connected to planet pinion of planetary gear set is used to control the rotation velocity of the eccentric pendulum mechanism. The motor torque is applied to drive the rotary shaft at a gear ratio of 1:20 and drive the generators by the sun gear with a gear ratio of 12:1. The generator including three 0.4 kW @1200 r/min alternators (as shown in Figure 2(d)) as a loading in EGM can produce electrical power converted by potential/kinetic energy from the motion of eccentric pendulum mechanism. In this case, rated velocity of the generator is 1200 r/min, and the rotated velocity of 100 r/min of the EGM is determined by the gear ratio 12:1. Therefore, the control target is that the EGM has to stable rotated by 100 r/min. The gravity center of flywheel is at top of the planetary gear to set 0°, while the gravity center of flywheel is at bottom of the planetary gear being 180°. As the flywheel being free rotated at 0°, within the first revolution, its velocity curve is measured by encoder as shown in Figure 3. As expected, the maximum velocity of 100 r/min occurs at about 180° and approaches to 1–3 r/min of the rotated velocity near 0°. Due to the large varying angular velocity of the flywheel, the efficiency of the electric energy power generated by EGM system is low. Therefore, a stable rotated velocity of the eccentric pendulum mechanism is required and can be done by the controlled servomotor. In practical, due to viscous friction, for free movement, the maximum rotated velocity of EGM within a time period will be decreased gradually to zero as shown in Figure 4. Therefore, extra energy to maintain stable rotated velocity of EGM system is required.

Prototyped of EGM.

Components of EGM: (a) flywheel, (b) planetary gear, (c) servomotor, and (d) generator mechanism.

Measured velocity of the eccentric pendulum mechanism.
Measured velocity of EGM decreasing gradually without control.
The dynamic performance of the servo-electromechanical systems is always influenced by uncertainties, for instance, a nonlinear disturbance or mechanical parameters. Among the system parameters such as eccentric inertia or damping coefficient are essential parameters in control design. In order to achieve a stable velocity output of the controlled plant and the specific transient specification, the accuracy and integrity of system modeling are required. The eccentric pendulum being rotated to generate centrifugal force to lead to difficulties in the velocity control, and the centrifugal force of eccentric pendulum produces a periodic torque.
Many literatures to focus on the corresponding control can be found. In De Wit and Praly, 1 rejecting oscillatory position-dependent disturbances with unknown frequency and unknown amplitude was proposed. These disturbances are produced by eccentricity in mechanical systems. In Kugi et al., 2 an active compensation of the roll-eccentricity-induced periodic disturbances has been done for the strip exit thickness of hot and cold rolling mills. The factorization approach over the set of stable transfer functions was provided by an adaptive least-mean-squares algorithm. In Gongand and Cao, 3 an active hybrid tilting-pad bearing with unsymmetrical flexible rotor and the hydraulic system was presented in this article. A dynamic model with the effect of gyroscopic moment was given. A proportional–integral (PI) controller and the finite difference method were used to improve the pressure distribution on each tilting pad surface. In Qaiser et al., 4 the stabilization and disturbance attenuation problems of the oscillating eccentric rotor were studied. With under-actuation property, a controller has been designed to de-spin the rotor and to reduce the translational oscillations. In Zhao et al., 5 the eccentric paddle mechanism with epicyclical gear is designed for amphibious search and rescue tasks. A gait planning method for conducting a legged crawl gait was proposed. Analysis of gait sequence and stability margin of the quadruped robot was then presented. In Das et al., 6 an active vibration control scheme for reducing transverse vibration of a rotor shaft due to unbalance was proposed. An electromagnetic exciters mounted on the stator at a plane was used for applying suitable force of actuation over an air gap to control transverse vibration. In Yang et al., 7 a rotor mass eccentricity compensation control strategy was presented to restrain the vibration of suspended rotor for bearing less induction motor. The suspension rotor dynamical model was deduced, and unbalanced vibration mechanism was analyzed. A compensator was designed to increase the radial force and improve the stiffness of the vibration signal.
Due to the periodic disturbance, a linear controller cannot be used to regulate the steady-state periodic error. Repetitive control has proven to be very effective for a system to reject periodic disturbance signal in practical applications. If the disturbance contains only single fundamental frequency, the repetitive control can be very effective to significantly reduce the steady-state error. Therefore, to stabilize the velocity output of the EGM with periodic disturbances, a repetitive controller is installed to existed velocity control loop in this article. Considering on improving required control performance, a dynamic model of the controlled system is required for the design of the controller parameters. Therefore, an appropriate identification method to determine mathematic model is needed. In this article, closed-loop identification derived from the concept of coprime factorization of the plant model is proposed.
In this article, EGM including eccentric pendulum mechanism, servomotor, and generator is designed. A dynamic characteristic is analyzed to establish the mathematical model of EGM. A stable rotated velocity of EGM can be operated by the controlled servomotor. Based on the periodic disturbances of EGM, a repetitive controller is installed to velocity control loop to reduce steady-state error. Simulated and experimental results are reported to verify the performance of the proposed EGM.
Modeling of EGM
To achieve a desired control performance, a dynamic model of EGM is required for controller design in that the appropriate identification of a mathematic model is the key point. As shown in Figure 5, system modeling is divided into three parts including of EGM system, generator system, and servomotor system. Note that the system parameters are clearly defined and are listed in Table 1. Observing Figure 1, the motor torque is applied to the ring gear, which drives the rotary shaft at a gear ratio of 1:20 and drives the generators by the sun gear with a gear ratio of 12:1. Angular position/velocity of the EGM is measured by optical encoder of 500 pulses per revolution installed in the right side of the rotation shaft.

Proposed system modeling of EGM in Figure 1.
Definitions of the parameters in Figure 2.

EGM: eccentric gravity machinery.
In this case of Figure 1, the inertia of rotation shift can be divided into two segments and assume the damping inside the shift being negligible. As shown in Figure 6, the torque
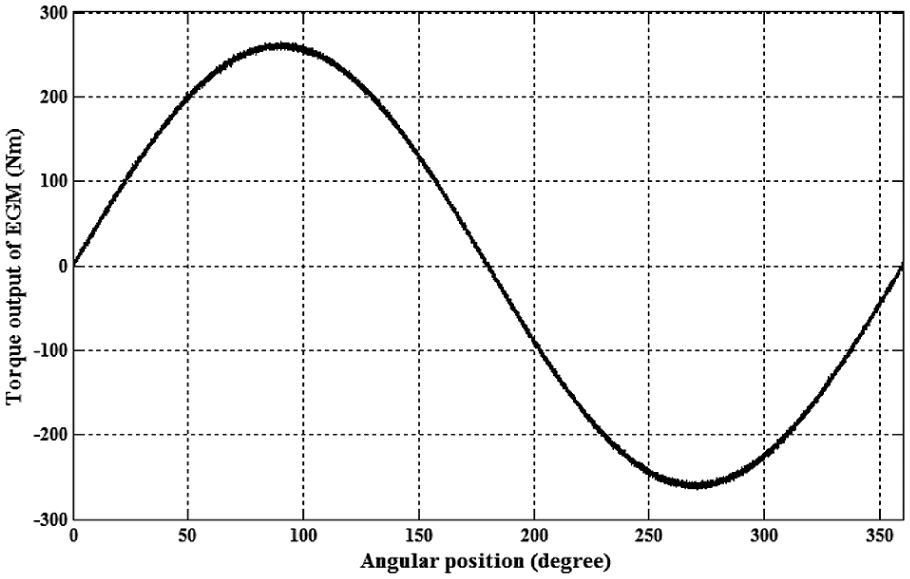
Plot of
Plot of
From Figure 5, the dynamic equations of the EGM system are obtained in the following.
For the servomotor system, the dynamic equation is given as

For the generator, the dynamic equation is given as

For right side of the eccentric pendulum mechanism, the dynamic equation is given as

For left side of the eccentric pendulum mechanism, the dynamic equation is given as

Laplace transformation of the above equations can be
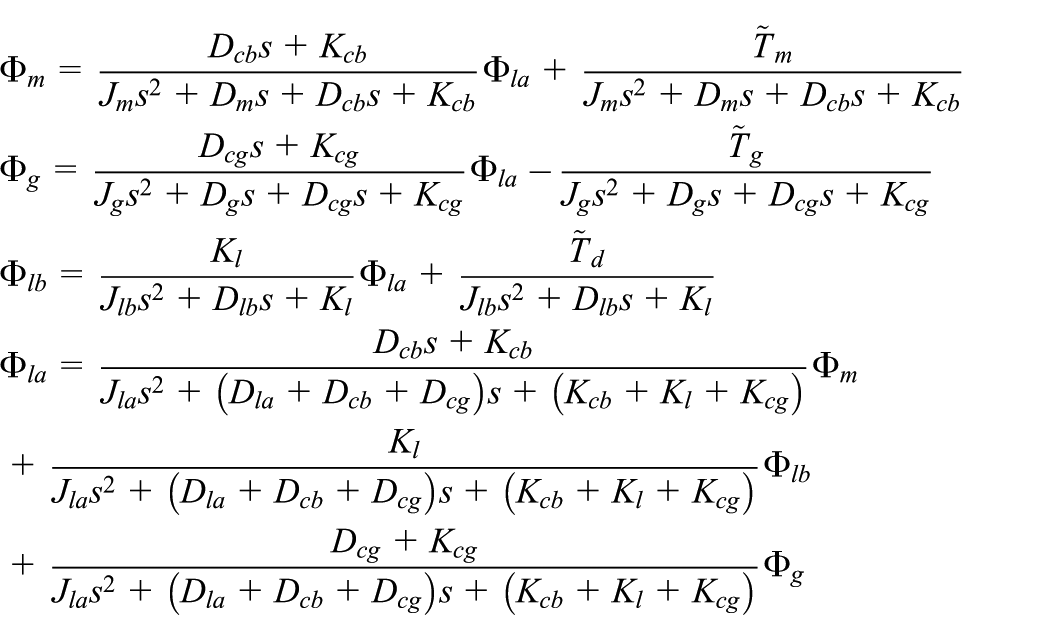
where

Control block diagram of the controlled system in Figure 5.
The accuracy parameters in Figure 8 are difficult to be measured, such as the spring and damping coefficients of mechanical couplings. Assume that the characteristics of the mechanical couplings between servomotor, EGM, and planetary gear set are rigid. Due to the inertia of EGM larger than that of generator and planetary gear set, the inertias of generator, EGM, and planetary gear set can be integrated and are simplified by Figure 9, where

Simplified model of Figure 8.
Then, the dynamic equations of the system in Figure 9 is given by

where

Control block diagram of the controlled system in Figure 8.
As indicated in Figure 10, with the output

Closed-loop system identification.
In the closed-loop system identification of this illustrated example, the rotation velocity of the generator


Closed-loop identification of the illustrated example.
Repetitive controller design to stabilize velocity of EGM
Owing to the result of the system modeling, a velocity controller is designed to achieve stable rotation of EGM. The torques caused by eccentric pendulum and the generator are periodic disturbances; therefore, a repetitive controller is installed to existed velocity control loop as shown in Figure 13. For a controlled plant of

Velocity control loop with repetitive controller.
Consider the repetitive control system of Figure 13, where the sensitivity function is

or equivalently, in the time domain

which can give the tracking error
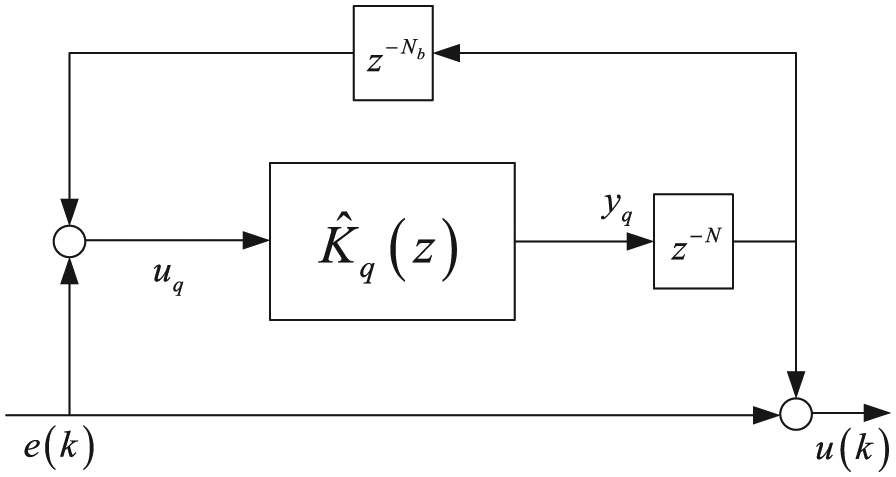
From Figure 13, the iterative algorithm of the repetitive controller can be constructed with sampling time

and

Discrete-time repetitive control scheme.
The sensitivity function of Figure 14 is obtained as

Clearly, the stability of the control system can be analyzed by consequence of the stability of all cascaded parts
10
including

By the small gain theorem, its stability can be assured for

with the corresponding open-loop transfer function internal stability, where
In this illustrated example, the period

Error responses of the control system with (solid line)/without (dashed line) repetitive controller.

Magnitude plot of sensitivity function of Figure 13.
Experimental results
The iterative algorithm of the repetitive control is executed by a digital signal processor TI TMS320C32 floating-point processor, where the sampling period was set to
Iterative algorithm of repetitive control rule.
The control rule can be rewritten as

where
In experimental results, a steady-state velocity outputs of EGM with repetitive controller (solid line), with PID controller (dashed line), and without control (dash-dot line) are shown in Figure 18. From Figure 18, the rotation velocity of EGM can be driven to required velocity of 100 r/min with PID velocity controller; however, large velocity variation is still produced. With the repetitive controller, a stable velocity of 100 r/min can be done.

Velocity outputs of EGM with repetitive controller (solid line), only with PID controller (dashed line), and without control (dash-dot line).
Conclusion
In this article, an EGM with 12-kW generator is constructed and composed of eccentric pendulum mechanism and servomotor, which can be applied to convert continuously kinetic energy generated by gravity energy to electric energy. A stable velocity control system with repetitive controller applied to EGM is required for a stable power output. Therefore, the dynamic characteristic of EGM is analyzed, and its mathematical model is established. Moreover, the torques of EGM and generator are measured, and their characteristics are described. Due to periodic characteristics of disturbance, a repetitive controller is designed and is installed to velocity control loop. The stability performance and control performance of the repetitive control system are discussed. The iterative algorithm of the repetitive control is executed by a digital signal processor TI TMS320C32 floating-point processor. Simulated and experimental results are reported to verify the performance of the proposed EGM. Under the required EGM velocity output of 100 r/min, its error decays rapidly within the first two cycles of the reference signal.
Footnotes
Handling Editor: Yong Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.