
Abstract
Impact dampers are able to reduce vibration effectively through impacts and thus have wide applications in mechanical control. This work investigated the chattering behavior of a two-degree-of-freedom impact damper. Chattering is a phenomenon of continuous collisions within a short time. A theoretical model was developed to obtain the completing position and time of chattering. The fourth-order Runge–Kutta method was adopted to numerically solve the model. The results of bifurcation diagram and temporal map were obtained with different parameters, confirming the validity of the model. Furthermore, the model showed that viscosity is an important parameter separating the completing chattering from the non-completing chattering. The results demonstrated that the model can help solve chattering of impact damper by developing better understanding of the underlying mechanisms.
Introduction
An impact damper is a device which controls the response of the primary system through the impact between free mass (impactor) and primary system during vibration. Due to its advantages such as effective damping effect, simple structure, low cost, easy implementation, no power requirement, and suitable for harsh environment, there have been many studies on the device recently, including single impact dampers,1–4 BBD impact dampers, 5 multi-body impact dampers, 6 particle dampers,7–12 non-obstructive particle dampers,13,14 and impact damper with fine particles.15–20 While various types of impact dampers exist, they have the same underlying damping mechanism: during vibration, momentums are exchanged and mechanical energy is dissipated via collisions.
Among the devices, the single impact dampers are most widely studied, and many theoretical models were developed based on the single impact dampers.3,6,17 The studies found that the current devices typically have two symmetric impacts per cycle to achieve good damping performance.1,2 However, the efficient damping effect can only be achieved near the resonance point, and the location far away from the resonance point has poor damping or even amplifies the vibration. 4 Therefore, when the vibration frequency is in a range other than that near the resonance point, the current models suggest unsatisfactory damping performance of the twice-per-cycle impact. However, we recently discovered through experimental studies that, with low restitution coefficients, the impact damper has good performance over a wide frequency range, 17 which was different from the theoretical predictions. Numerical modeling of the motion of the damper revealed that there existed chattering and viscous phenomena when a good damping effect was achieved. Chattering refers to the fact that large or even infinite number of collisions occur in a short period between the free mass and the primary system. The viscosity refers to synchronous motion of the free mass and the primary system. So, chattering and viscosity may be a new effective route to achieve good damping performance. However, so far, there is no study on the effect of chattering on impact dampers.
Chattering can be directly transformed into viscosity under two circumstances. First, chattering is absent when the restitution coefficient is zero. The collision results directly in the viscosity. The circumstance is at the end of chattering when there is no relative movement between the free mass and the primary system. Such type of chattering is defined as the “completed chattering.” However, there is no viscosity with “non-completed chattering” when the relative movement between the free mass and the primary system is not zero. The study on chattering started from Budd and Dux, 21 Toulemonde and Gontier, 22 and Wagg and Bishop. 23 Their studies mainly focused on phenomena such as grazing bifurcation and induced variation of oscillation period and number of collisions times and the multi-peak phenomenon. Research on other issues of impact chattering has been very limited. Hős and Champneys 24 studied the grazing-induced self-excited vibration between the pressure relief valve and the base. Their results showed that low flow speeds and the valve pre-tightening force were two main factors causing chattering. Demeio and Lenci 25 developed a numerical approach to calculate the chattering duration in an inverted pendulum impact. Their study showed that the chattering duration was more associated with vibration amplitude than excitation frequency or damping ratio.
Singh et al. 26 studied the self-impact of a double pendulum, Davis and Virgin 27 studied the impact between a pendulum and a moving obstacle, and Wagg and Bishop 28 investigated the impact between a cantilever beam and a rigid obstacle. All these studies have shown the presence of chattering and viscosity. However, these systems are quite different from the impact damper. While these systems have fixed constraints and the amplitudes are limited to a given range, the constraint in impact damper is a free mass with no fixed location. So, the chattering on impact dampers can be markedly different from existing ones. However, current studies on impact dampers mainly focus on the twice-per-period symmetric impact. The chattering and viscosity phenomenon have not been included in the study.
This work aims to develop a theoretical model based on the classic impact damper model to study the chattering behavior. Through theoretical analysis and numerical simulation, the chattering duration time and the chattering-completion point under different vibration conditions will be obtained.
Dynamic model and governing equations
The model is based on the classic impact damper model to study the dynamic behavior of the
impact dampers. Figure 1 shows a
simplified dynamic model of a multi-body impact damper. The system consists of a primary
system of mass M, stiffness K1, damping
C1, and a free mass m located inside the
primary system. If the free mass consists of multiple components, the impact mass is then a
function of time m(t). The primary system vibrates under
an external excitation force

A simplified theoretical model of an impact damper.
Assume the center position as the original coordinate. When the free mass collides the primary system, both directions and velocity of the free mass change. To simplify the calculation, the following assumptions have been adopted:
There is no friction between the primary system and the free mass.
The free mass is a sphere with a mass m.
Considering collisions occur instantaneously, only the velocities of the system and the free mass change while their positions keep unchanged.
The inelastic collision is represented as the restitution coefficient R.
Only collision in the horizontal direction is considered.
Based on the assumption above, the motions of the system and the free mass can be described as


where X1 is the displacement of primary system and
X2 is the displacement of free mass. When


where “–” and “+” represent the instantaneous velocities before and after the collision,
respectively.
The free mass m(t) is a time-variant parameter. Since the change to the non-linear dynamic behavior caused by the free mass m(t) is slow, the free mass m(t) can be replaced with an average value in a vibration period, given by
where
In reality, the frequency of subharmonic collisions is often the integral divisor of the system excitation frequency. So, equation (5a) can be re-written as

where n is an integer.
To simplify the calculation, only the constant and subharmonic terms are included while the harmonic part is neglected. Equation (5b) is simplified as

where
During the vibration process, the free mass m(t) and the primary system M collide, which generates an impact force. The system motion can be considered as a piecewise linear process, based on which further assumptions can be made:
There is no friction between collisions and only the vibration in the horizontal direction is considered.
When the free mass and the primary system collide, there is a local variable at the
collision point. Also, the primary system exerts a stiffness constraint
The restitution coefficient is represented by a viscous damping coefficient
Based on the assumptions above, the impact damper model in Figure 1 can be further simplified as a two-degree-of-freedom (DOF) vibration model, as shown in Figure 2.

Schematic diagram of the impact damping system with two degrees of freedom.
In Figure 2, the primary system
M and free mass m(t) are connected with
the fixed end through two spring-dashpot systems characterized by stiffness values
K1 and K2 and the damping values
C1 and C2, respectively. Under the
effect of a time-variant horizontal force

where

where D is the clearance and “·” represents the derivation against time
t. With


By defining dimensionless parameters


where

Theoretical derivation of chattering phenomenon
In equations
(11) and (12),
Considering the free mass and the collision point


When

where
Based on the study of literature,
29
there is a one-dimensional (1D) stable flow equation at the
chattering-completion point

where

Therefore,

From
Numerical simulation of chattering phenomenon
In the previous section, we have obtained the chattering-completion point and the chattering-completion time of an impact damper system through theoretical derivation. This section is to conduct a numerical simulation using the fourth-order Runge–Kutta method to verify the theoretical derivation.
By applying the fourth-order Runge–Kutta method to reducing the order of equations (11) and (12), a four-dimensional (4D) equivalent system is achieved as follows

where

To simplify the calculation, we can define the following parameters
So, the parameters in equation (18) can be written as

The main parameters used in the calculation are as follows:
The clearance d is first selected as the control parameter while other parameters keep constant. Figure 3 shows the bifurcation diagram of the displacement of the primary system M with d varying from 0 to 2. As d continuously increases, the system has a chattering behavior at d = 0–1.35. When d > 1.35, the system is in a periodic or quasi-periodic motion state.

Bifurcation diagram of
The system excitation frequency

Bifurcation diagram of
To further analyze the chattering of the system, Figures 5–7
show the time-domain diagrams of the relative displacement and relative velocity of the free
mass m at different excitation frequencies ω. At
ω = 0.2, Figure
5(a) shows the chattering starts at about t = 332 s and lasts
about 11 s as indicated by a horizontal line with

Time-domain diagrams of (a) free mass displacement and (b) free mass velocity with ω = 0.20.

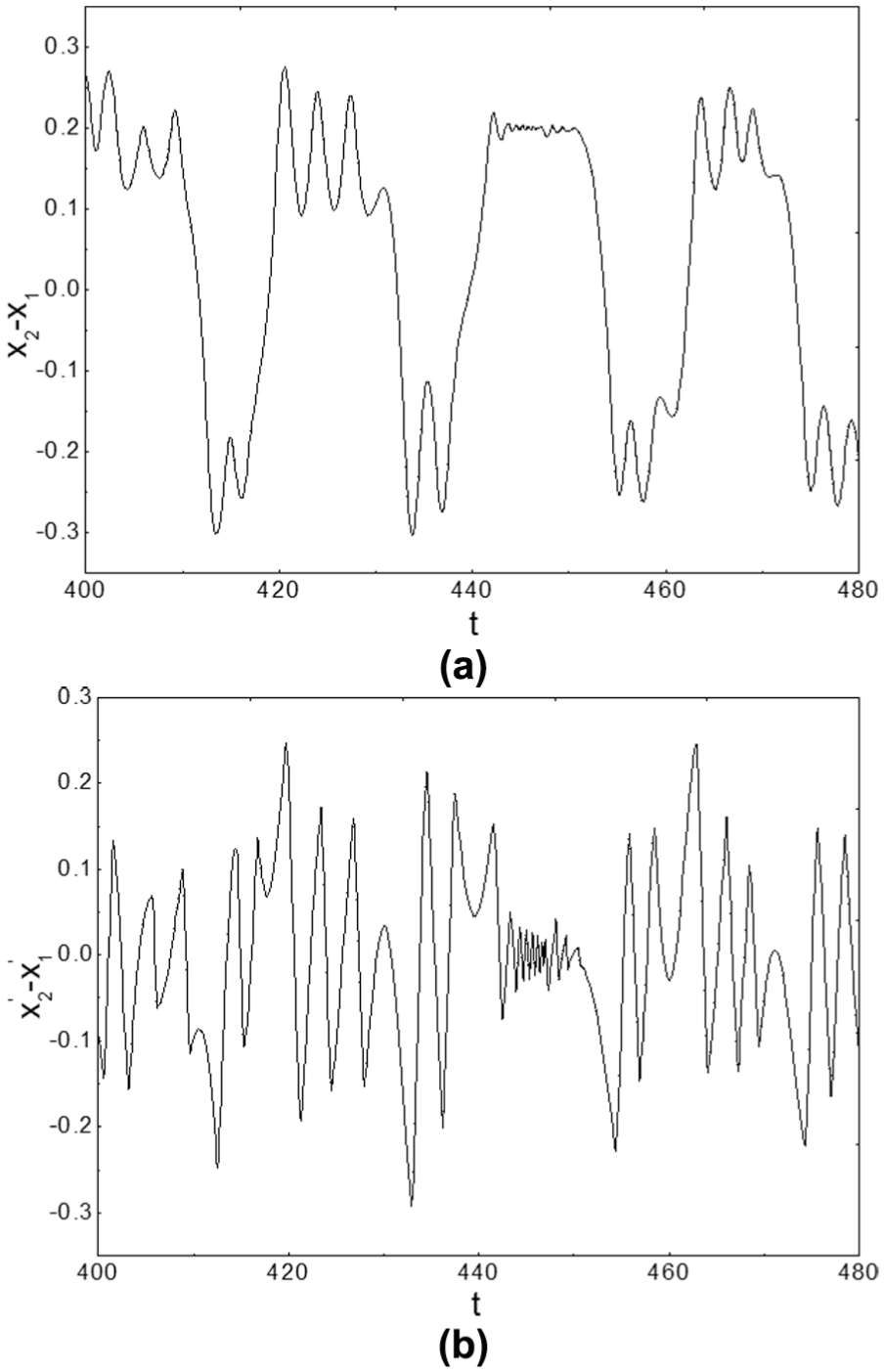
Time-domain diagrams of (a) free mass displacement and (b) free mass velocity with ω = 0.25.
Time-domain diagrams of (a) free mass displacement and (b) free mass velocity with ω = 0.30.
The simulation results indicate that when ω = 0.20 and 0.25, the system
has the completed chattering. At the completion point of the chattering, a state of
viscosity exists when the system and the free mass has no relative movement within a short
period. Also, the duration of the completed chattering is almost the same for
ω = 0.20 and 0.25, which can be calculated by substituting the system
parameters into
Conclusion
This work has studied the chattering-completion point and the chattering-completion time in a classic impact damper through theoretical derivation and numerical simulation. The bifurcation diagram and the time-domain map were obtained under different conditions. The results of the numerical simulation were consistent with the theoretical derivation, confirming the validity of the theoretical derivation. The main findings are summarized as follows:
With the initial point of a two-DOF impact damping vibration system as
Based on the time-domain diagrams of the relative displacement and relative velocity of the free mass m under different conditions, the system only has chattering after going through a period of complicated motion response. The chattering duration time and completion state are consistent with the results from the theoretical derivation.
The system has both completed chattering and non-completed chattering. The time-domain diagrams clearly reveal that viscosity is a critical characteristic at the end of completed chattering.
Footnotes
Appendix 1
Acknowledgements
The author also thanks Dr Runyu Yang for his help on paper revision.
Handling Editor: Francesco Massi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 51475308) and the National Key R&D Plan of China (grant no. 2016YFD0700900).