
Abstract
A non-smooth cold roll system of rolling mill is studied to reveal the bifurcation of the piecewise-smooth and discontinuous system. To examine the influence of the parameters on the dynamics, the bifurcation diagram is constructed when it is unperturbed. Hamilton phase diagrams of the non-smooth system are detected, which differ significantly from the ones obtained in the smooth system. Non-smooth homoclinic, heteroclinic, and periodic orbits are determined, which depend on the classical heteroclinic periodic orbits, periodic orbits, and a necessary condition. A extended Melnikov function is employed to obtain the criteria for the non-smooth homoclinic bifurcation in this class of piecewise-smooth and discontinuous system, which implies that the existence of homoclinic bifurcation arises from the breaking of homoclinic orbits under the perturbation of damping. The results reveal that this kind of non-smooth factor has little influence on the chaotic threshold apart from calculating piecewise integrals. The efficiency of the criteria for non-smooth homoclinic bifurcation mentioned above is verified by the phase portraits, Poincaré section, and bifurcation diagrams, which laid a theoretical foundation for parameter design, stable operation, and fault diagnosis of rolling mills.
Introduction
With the development of science and technology, the investigations on vibration and control of a non-smooth system have been of great significance inengineering.1–3 Melnikov’s method, a tool to obtain analytical results, has been extended to piecewise-smooth dynamical systems by geometrical or analytical technique.4–14 It is important to note that the particular piecewise-smooth dynamical system was investigated in Tian et al.11–13 and Niziol and Swiatoniowski. 14 Although the known works have given some good ideas, these results were limited in terms of the theoretical results, which encourage continued research on the practical application.
Rolling mill is the core equipment of rolling industry. Recently, modern industry is rapidly developed and the demand for the specifications of steel products becomes more stringent. The vibration of the rolling mill affects the accuracy of products, which becomes one of the key factors. It can be divided into vertical vibration,3,14,15 free transverse vibration, 16 vertical–horizontal coupling vibration, 17 torsional vibration, 18 and so on.19–26 Although the characteristics of the vibration of the rolling mill have been investigated, the complicated bifurcations still remain unknown. It is worthwhile noting that a piecewise nonlinear dynamic model of rolling mill was constructed in Hou et al. 3 and the characteristics of bifurcation were considered by means of singular point stability theory and singularity theory. However, due to the non-smooth characteristic, the research was not focused on the global bifurcation of the piecewise nonlinear dynamic model of rolling mill.
The motivation of this article is to explore the global bifurcation based on the non-smooth roll system of rolling mill constructed in Hou et al. 3 Hamilton phase diagrams of the non-smooth system are obtained in the next section. The results show that non-smooth homoclinic, heteroclinic, and periodic orbits depend on the classical heteroclinic orbits, periodic orbits, and a necessary condition. In order to obtain the criteria for non-smooth homoclinic bifurcation, Melnikov function is extended to this kind of non-smooth system by the use of Hamiltonian function and the characteristics of the non-smooth homoclinic orbits in section “Non-smooth homoclinic orbits bifurcation.” The efficiency of the criteria for homoclinic bifurcation mentioned above is verified by the phase portraits, Poincaré section, and bifurcation diagrams in section “Numerical simulation.” These results might be a step toward promoting the interest in the global bifurcations directly for non-smooth system in the practical application.
Preliminary dynamic analysis
Consider a cold rolling mill shown in Figure 1 and suppose the system subjected viscous damping

where

is the nonlinear elastic force between pressure cylinder and roller

is the nonlinear elastic force between balance cylinder and roller.

The piecewise nonlinear model of rolling mill system.
Although the characteristics of bifurcation of the rolling mill have been investigated preliminarily in Hou et al., 3 the complicated bifurcations of system (1) still remain unknown. Therefore, in the following sections, we investigate the complicated dynamics such as equilibrium bifurcation and non-smooth Homoclinic bifurcation.
Let

system (1) can be written as two first-order differential equations

The restoring force function

is the piecewise nonlinear function, which leads Hamiltonian function
where



Obviously, due to
I:
II:
III:
Region I: the origin is the only center (0,0).
Region II: there exists two fixed points. The origin
Region III: system (5) has three fixed points. The origin
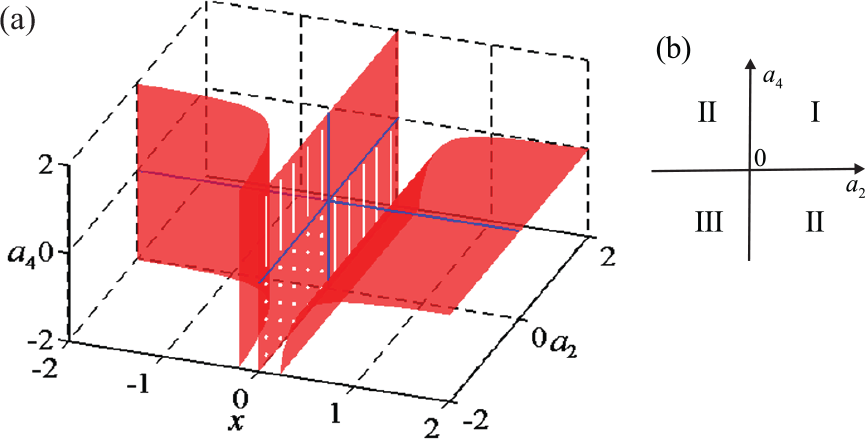
Equilibrium bifurcation diagram of system (7): (a)
Conventionally, according to equilibrium bifurcation diagram and Hamiltonian function, we can obtain the phase portraits for the Hamiltonian system. But the method is invalid in region III for the piecewise Hamiltonian system (7). Of course, the existence of non-smooth orbits in this system depends on both the classical heteroclinic orbits and the periodic orbits. Meanwhile, the more conditions of bifurcation would be detected.
Assume that heteroclinic orbits exist in region III, which connect a pair of saddle points. Hence, the heteroclinic orbits should satisfy

Obviously

and

So, we have

which is the necessary and sufficient condition of the existence of the heteroclinic orbits for system (7).
Furthermore

and

where

Phase portraits for the system (7).
Non-smooth homoclinic orbits bifurcation
The damping and the external excitation are unavoidable in practice, which lead to some more complicated phenomena in regions II and III. In this section, we will detect non-smooth Homoclinic orbits bifurcation for system (5).
Let
where

and

Furthermore,
Clearly, for
For
For
(A1) The functions
(A2) When

Non-smooth homoclinic orbits.
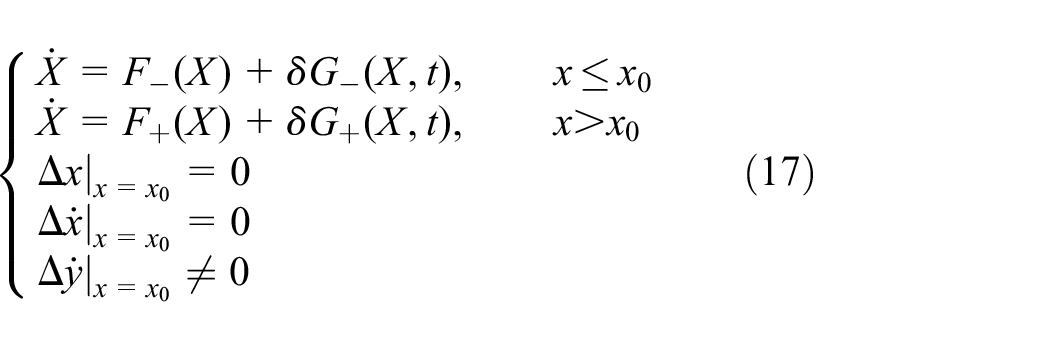
For convenience,

be the trajectories of perturbed system (17), which lies in the unstable manifolds


Stable and unstable for the perturbed system.
Let

where the operator “∧” is defined as

for any
As in the smooth case, we obtain

and

due to
Using the Hamiltonian function to measure the distance between the perturbed stable and unstable manifolds yields11–14

Moreover,
Let

and

Clearly

Clearly, the perturbed solution

and

Substituting equations (18), (30), and (31) into equation (27), we have

Similarly,

Then, equations (29), (32), and (33) lead to

By a similar procedure, we can obtain

From equations (26), (34), and (36), we obtain

That is

which can be used to detect the homoclinic tangency in the non-smooth system mentioned above.
Remark 1
The results reveal that this kind of non-smooth factor has little influence on the chaotic threshold apart from calculating piecewise integrals for this class of nonlinear dynamical system (17).
Numerical simulation
In this section, using equation (37) and the numerical method, the homoclinic bifurcation and the chaos for system (17) are detected and verified.
Let

where



and
Thus, the corresponding Melnikov function for system (17) is given by equation (37) as the following form

where


Hence, if and only if the following inequality holds


Taking
We can show the existence of period-2 motion
The chaotic attractor is presented in Figure 7(c)

Bifurcation diagrams for

The phase trajectory and Poincar’e section: (a) period-2 motion for
The results presented above show that the vibrations of the non-smooth roll system of rolling mill have rich dynamic behaviors depending on
Conclusion
The bifurcations of the non-smooth roll system of rolling mill were detected to reveal the characteristics of this class of the piecewise-smooth and discontinuous system. The bifurcation diagram constructed for the unperturbed roll system of rolling mill was used to examine the influence of the parameters on the dynamics. Hamilton phase diagrams showed the non-smooth homoclinic, heteroclinic, and periodic orbits depended on the classical heteroclinic periodic orbits, periodic orbits, and a necessary condition. The necessary condition
Footnotes
Handling Editor: ZW Zhong
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of China (Nos. 11372196, 11602151, 11472180 and 11602169), Natural Science Foundation for Outstanding Young Researcher in Hebei Province of China (No. A2017210177), Natural Science Foundation for Breeding Outstanding Young Researcher in Hebei Province of China (No. A2015210097), Natural Science Youth Foundation in Hebei Province of China (No. A2015421006), and the Training Program for Leading Talent in University Innovative Research Team in Hebei Province (No. LJRC006).