
Abstract
This article is concerned with attitudes synchronization of networked autonomous underwater vehicles, which aims to enable all the autonomous underwater vehicles tracking the desired attitude coordinately, when the desired attitude information can only be achieved by one or one subset autonomous underwater vehicles. A Lyapunov technique is presented for designing an adaptive synchronization control protocol using sliding mode and consensus theory. The uncertainty of the autonomous underwater vehicle dynamics, and the unknown external disturbance and input saturation were both considered in our controller proposed; moreover, only the neighbors’ information were used by the controller, so it is totally distributed. Simulations were performed to validate the theoretical results.
Introduction
As an important member of the robot family, autonomous underwater vehicle (AUV) has been employed widely in sub-sea exploration. Due to the complexity of the ocean environment and difficulty of the underwater tasks, we usually need multiple AUVs work cooperatively as a group. Coordinated detection, coordinated guidance, and coordinated control are the key cooperative behaviors for the multiple AUVs. To achieve these cooperative behaviors, we usually need AUVs move in a formation, which is called formation control problem. The following control strategies are the typical existing works for formation: the leader–follower, the virtual structure method, artificial potential field, the method based on behavior, and the method based on consensus. In 1989, leader–follower method is used for the formation control of mobile robot for the first time in the study of Wang. 1 In the study of Fahimi, 2 a leader–follower strategy was designed and applied to keep multiple underactuated surface ships moving in formation using sliding mode method. In the study of Kowdiki et al., 3 the leader–follower method was combined with artificial potential field method; this compound formation strategy was used to control mobile robots in their work. Nair et al. 4 proposed a fuzzy control algorithm by combining the artificial potential field method and synovial control to cope with the uncertain model parameters. The behavior method was proposed in the study of Mataric 5 in the earliest.
Attitude is the direction of a robot in each dimension of its moving space; so in the formation control problems, it is important to make the attitudes of each robot track the desired attitude coordinately, which is called synchronized attitudes problem. Synchronized attitudes control has wide implications in the field of multi-robots and especially in the field of teleoperation for robots when they are executing tasks. For attitudes synchronization control, Zhang et al. 6 considered model parameter uncertainty and external disturbance, and designed attitudes coordinate tracking controller for spacecrafts. Cong et al. 7 also considered spacecraft attitudes synchronized control problem based on time-varying sliding mode control methods. Zou and Kumar 8 proposed an attitude synchronization control based on terminal sliding mode control and adaptive control method to ensure that the coordinated error convergence to zero in finite time. A distributed adaptive synchronization controller is proposed using the state information of adjacent agents in the study of Peng et al. 9 The design does not require an accurate model of each agent, and developed controller ensures that the state of each agent is synchronized with the state of the leader.
In the practical coordination control of multi-robots, we also have to consider the input saturation problems. Li et al. 10 studied the consensus of first-order model in the case of input saturation and Ren 11 studied the second-order dynamic model under condition that the limited input saturation, respectively. In practical applications, the actuator of the system exists as saturated nonlinear problem; for this problem, there are two common methods normally, one is the direct method 12 and the other is anti-windup method. 13 Li et al. 14 uses the direct method combined with the fuzzy control algorithm to solve the saturation limited problem in robot control. As for a single attitude tracking problem of AUV, Cui et al. 15 proposed an anti-saturation compensator to solve the problem of saturated non-linearity; the stability of the closed-loop system is proved by the Lyapunov equation. In the control design of Cui et al., 16 the external interference, the control input non-linearity, and the model uncertainty are taken into account. The two neural networks (NN), including the commenter and the action NN, are integrated into the adaptive control design. In order to eliminate the non-linearity of the control input of the AUV, a compensation item is also designed in the adaptive control. In the study of Cui et al., 17 a general underwater robot integrated sliding mode controller (ISMC) based on multi-input and multi-output–extended state observer (MIMO-ESO) has been developed. In the control design, it has been successfully solved with the unmeasured velocity, unknown disturbance. And it is shown that the proposed method is better than the conventional potential difference (PD) control method.
In this article, we considered the attitudes synchronization of multiple AUVs with input saturation and model uncertainty. The remainder of this article is organized as follows: in section “Introduction,” we introduce the problem of AUV attitude synchronization control and formulate the control objective of this work. In section “Problem formulation,” we establish a dynamic model of the AUV, and the communication extension graph is introduced. In section “Control design without input nonlinearities,” an adaptive sliding mode control is proposed for the AUV heading synchronized control. In section “Control design with input saturation,” we introduce the input saturation cases with multiple AUVs attitude synchronization control. The simulation experiment results are presented and discussed in section “Simulation results.” Conclusion and future research works are given in section “Conclusion.”
Problem formulation
For a group of

Example graph and its Laplacian.
Because the virtual agent cannot get any information from others, the row sum of the matrix A is equal to 1, except for the first row. It is obvious that all the diagonal elements of L are 1, we can know that L is a diagonal dominant matrix, positive define, and reversible; its inverse matrix is
Normally, the Euler angles

where
To make the attitude of each AUV track the desired attitude

where

where

As so far, the control objective of this article can be described as follows: by designing the control inputs
Before going on, we introduce the following assumptions.
Assumption 1
The yaw angle
Assumption 2
The external disturbance
Assumption 3
The control gain
Control design without input nonlinearities
The time derivative of the tracking error is

According to the definition of Laplace matrix L and equation (5), we have

In this section, we consider the unknown disturbance and propose an adaptive controller based on sliding mode control for the AUV heading synchronization control.
Define the sliding mode surface as follows

where
Substituting equation (5) into equation (7), we have

Its time derivative is

Then, substituting equation (1) into equation (9), we have

Choose the exponential reaching law 15 as

where
The control law for AUVs is proposed as follows

where

where
The according adaptation law is chosen as

where
Theorem 1
For the heading control system of an AUV in equation (1), the sliding mode is chosen as equation (7), control law is equation (13), and adaptation laws is equation (14). The closed-loop system converges to the sliding mode surface
Proof
Select the following Lyapunov candidate function

where
Its time derivative is written as follows

Substituting equations (10) and (14) into equation (16), we have
Then, substituting equation (13) into equation (17), we have

Then, by simplifying calculations in equation (18) we can get

According to Assumption 2, we can get

We can find that
It is worth noting that since the control law contains the sign function

where

Inside the
Next, we will prove that in the case of that only part of the AUVs can get the desired yaw angle; all the yaw angle of AUVs can track this desired attitude.
Define the error between the AUV heading angle and the desired attitude as

where

introducing auxiliary variables

where

then

where A is the normalized weighted adjacency matrix which has been introduced before. Due to the first row elements of matrix A are zero, and the rest of the rows elements’ summations are 1, we can get

then we have

the time derivative of equation (23) is

define

because of equation (29), we can get

Lemma 1
For the time constant


where
Proof
The solution of equation (32) is

and
Because

In addition, due to the following equation

we rewrite equation (36) as follows

This completes the proof.
Control design with input saturation
In the practical applications of AUV, the control system of the actuator exists as saturated nonlinear problems usually. If these problems were ignored, the control performance and stability will be affected. Then attitude control of AUV is achieved by manipulating the rudder and the rudder also exists as saturation, which is shown in Figure 2.
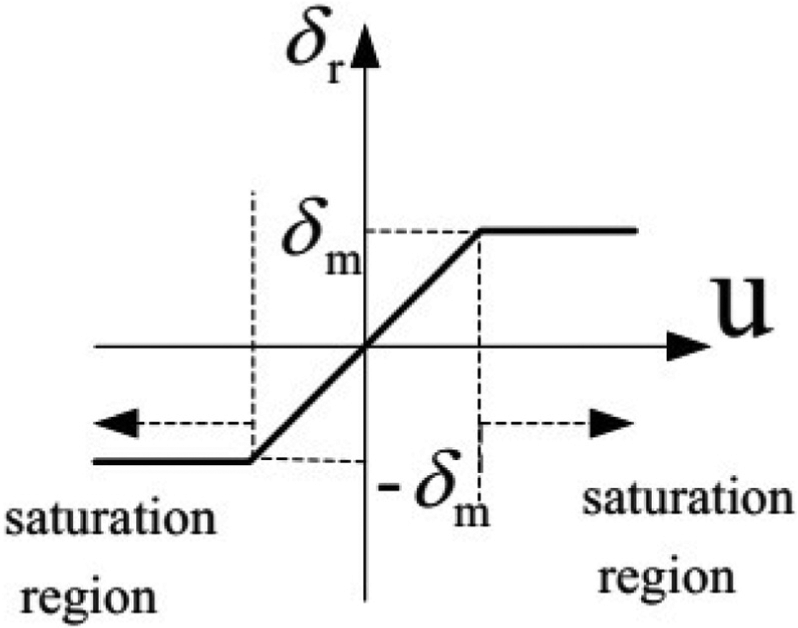
Saturation properties of the rudder.
The saturation characteristic of the input rudder angle can be expressed as

where
In this article, we use the anti-windup method to cope with the saturation problem. This method is divided into three steps: first of all, ignore the input saturation limitation and design the control law which satisfies the system performance. Then, the output of the actuator is compared with the value of the control law, and input the obtained deviation signal to the auxiliary anti-windup compensator. Finally, the output of the compensator is fed back to the controller, and further compensates for input restrictions. It is worth noting that this compensator only works when the rudder angle reaches saturation. At this time, AUV closed-loop system block diagram is shown in Figure 3.
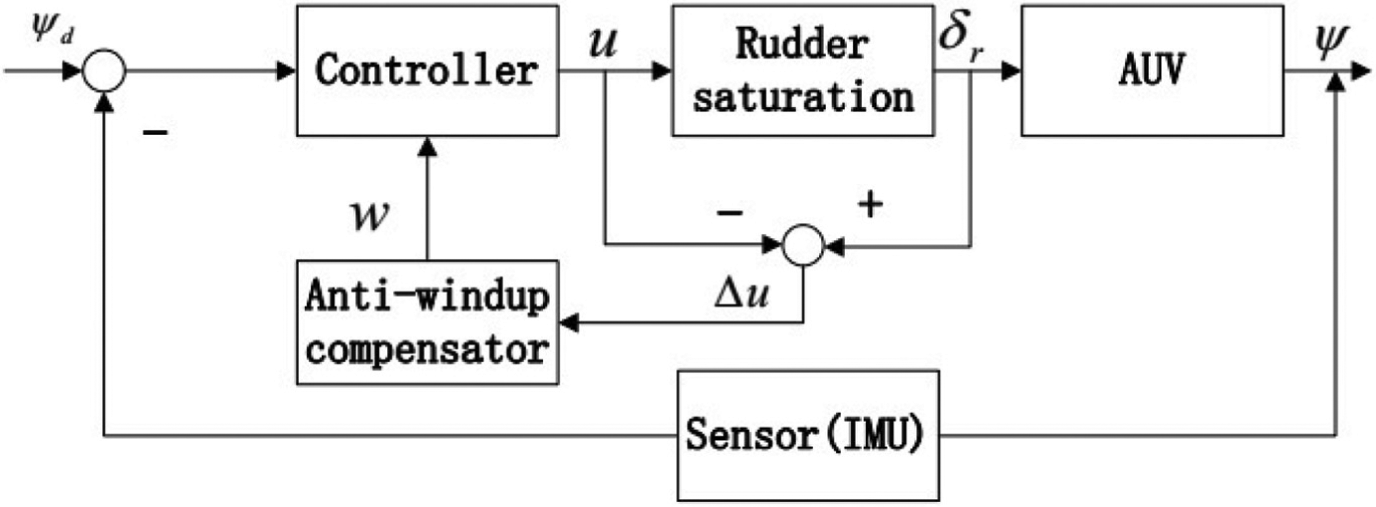
AUV anti-windup compensation control system.
The anti-windup compensator is designed as

when
Considering the actuator saturation, the control law is designed as

where
We also consider the unknown disturbance to the AUV in this article. Here, we design a nonlinear disturbance observer to estimate the unknown disturbance to compensate for the impact on the AUV system. The following nonlinear disturbance observer was proposed

where
The adaptation law is designed as follows

where
Theorem 2
For the heading control system of an AUV in equation (1), the sliding mode is chosen as equation (7), control law is equation (41), adaptation laws is equation (43), the anti-windup compensator is equation (40), and disturbance observer is equation (42). The closed-loop system converges to the sliding mode surface
Proof
Consider the following Lyapunov candidate function

The time derivative of equation (44) is

Substituting equations (10) and (43) into equation (45), we can get

Simplifying calculations from equation (46), we can get
and according to Assumption 3, we have

According to Assumption 2, we can get

Due to the following inequalities


Substituting equations (50) and (51) into equation (49), we can get

The design of the parameter needs to satisfy the condition that each element of the diagonal matrix
So the system state would converge to the sliding mode surface
In addition, according to Lemma 1, there exists a time constant

Simulation results
To illustrate the dynamic performance of the proposed distributed attitudes synchronization control scheme, consider a group of three AUVs with a communication network that induces a graph shown in Figure 4, where the 0-node denotes the virtual AUV, and its attitude is the desired head for each AUV. To illustrate the results proposed simply, we only consider the case without input nonlinearities.

The extended communication graph.
The corresponding Laplacian matrix L is
We assume that three AUVs are identical, and their model parameters are the same. We also assume that they are subject to the same external disturbance. Select the model parameter values
The simulation results were shown in Figures 5–10. From Figures 5 and 6 we can find that all the yaw angles of AUVs can track for the desired attitudes coordinately, and the according synchronization error goes to zero; moreover, the sliding mode of each one converges to zero asymptotically from Figure 8. We can also find that the yaw angular velocity of each AUV can reach consensus from Figure 7. Figure 9 depicts the rudder inputs of each AUV; we can find they also realize synchronization, moreover, without saturation. Figure 10 is the external disturbance and its estimation.

Synchronized attitudes of yaw angles of each AUV.

The synchronized errors of yaw tracking.

Synchronized angular velocity of yaw angles of each AUV.

The sliding mode of each controller.

The rudder input of each AUV.

The disturbance.
Conclusion
In this article, we studied the synchronized attitudes control problem of multiple AUVs. We proposed a distributed adaptive control law using the attitudes tracking error based on sliding method. Our strategy is fully distributed because each controller needs only its neighbors’ information; moreover, they can track the desired attitude when this attitude can be reached only by one or one subset AUVs. The uncertainty of the models, and the input saturation and unknown external disturbance are both considered by adaptive laws and commentators. The stability of the control law proposed was analyzed and proved theoretically. The simulation results validate the effectiveness of algorithm proposed. Attitudes synchronization of AUVs in three dimensions will pose great challenges and will warrant our further research in the future.
Footnotes
Acknowledgements
Yani Zhang and Yintao Wang are the co-first authors.
Handling Editor: Francesco Massi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China via Grant 51209175, 61472326.