
Abstract
A polymer cable–driven parallel robot has a wide range of potential industrial applications by virtue of its light actuator dynamics, high payload capability, and large workspace. However, due to a viscoelastic behavior of polymer cable and difficulty in actual cable length measurement, there have been inevitable position and tracking control accuracy problems such as pick and place a high payload application. In this article, to overcome control problem, we propose a model-based open-loop control with the cable elongation compensation via experimentally driven cable model and switching control logic without additional Cartesian space feedback signal. The approach suggests a five-element cable model that is made with series combination of a linear spring and two Voigt models as a function of payload and cable length that are available to be measured in real-time. Experimental results show that using the suggested method, the cable length error due to viscoelastic effect can be compensated, and thus the position control accuracy of the polymer cable–driven parallel robot improved remarkably especially in gravity direction.
Keywords
Introduction
A cable-driven parallel robot (CDPR) is a special type of a parallel robot mechanism actuated by winding and unwinding flexible cables hooked up with an end-effector. Since the use of flexible light cable as an actuator can significantly reduce the actuator weight and inertia, the CDPR could be applied for wide workspace, heavy payload, and fast motion application such as low-gravity simulator, camera robot, and heavy material handling in larger workspace with low installation cost.1–4
Recently, to magnify the advantage of the CDPR, a polymer cable–driven parallel robot (PCDPR) is developed that utilizes a polymer cable as an actuator instead of steel wire cable. However, because the PCDPR may yield a control problem caused by inaccurate cable length measurement caused by cable viscoelastic property especially for the high payload application, 5 the PCDPR has not yet been widely applied to practical industrial application. Several researches have been tried to encounter the flexible cable’s viscoelastic effect in the CDPR control. To consider elastic behavior of cables, Huang et al. 6 modeled the cable as series points connected via elastic massless links for the tethered space robots. Kraus et al. 7 proposed a structured method to identify the load, estimate the resulting displacement of the platform, and improve relative accuracy by more than 50% by compensating it. Miermeister et al. 8 developed an extended elastic cable model which included the hysteresis effect during cable force computation where the cable behavior not only depends on local parameters but also on global and time variant parameters such as the platform pose. Miyasaka et al. 9 developed the hysteresis model for longitudinally loaded cables based on the Bouc–Wen hysteresis model. Korayem and colleagues10–12 developed a computational method for obtaining maximum dynamic load-carrying capacity of the suspended CDPR with viscoelastic cables and suggested CDPR control algorithm derived by linear quadratic regulator (LQR), linear quadratic Gaussian (LQG), and feedback linearization control. In addition, the elasticity and uncertainties of a CDPR were neutralized by robust control, and the flexibility and uncertainties of cable suspended robot were compensated using sliding mode control. 13 Those approaches have improved tracking performance of CDPR obviously. However, their methods need to measure some feedback signals to build up a controller, not practically applicable. Thus, using a simple but realistic viscoelastic model, which includes elastic and creep behavior of a polymer cable, is necessary to improve position control performance of PCDPR.
Advanced control algorithm of CDPR has also been proposed by some researches, such as fuzzy control and proportional–integral control 14 and vision-based position control.15,16 But most of the previous methods with feedback signal are not practically applicable to the actual PCDPR because of the sensor measurement cabling constraints and cost. Hence, improved open-loop control algorithm with precise cable deformation compensation algorithm is necessary for precise PCDPR control performance.
In this study, to improve the position control accuracy against the viscoelastic properties of a polymer cable in PCDPR, we propose a five-element viscoelastic cable model based on the experiments. And then accomplish model-based open-loop position control of the PCDPR system in experiments via the modeled polymer cable viscoelastic behavior.
This article is organized as follows. First, the description of the developed PCDPR system with its kinematic and dynamic models is shown. Second, the five-element viscoelastic modeling and parameter estimation result by experiments are provided. Then, the model-based open-loop control is explained to compensate position error for a high payload workspace. Then, the experimental results of the open-loop position control will be shown. Finally, conclusion will be addressed.
PCDPR system
Description of PCDPR system
The high payload PCDPR shown in Figure 1 is designed for the purpose of heavy object transportation, assembly process in industry. It can manipulate 6-degree-of-freedom (DOF) end-effector configurations with eight-cable connection for a wide workspace in regular hexahedron steel frame of size 4 m × 4 m × 4 m. 17 Eight winches are fixed at bottom frame equipped with force sensors in each winch to measure cables’ tension. And eight pulleys, assembled with two wheels in each set, are fixed at the corners of top frame that guides all directional cables from winch to the end-effector. As a light flexible actuator of the high payload PCDPR, polyethylene (Dyneema® cable, LIROS D-Pro 01505-0600) is used, the weight of which is 1 kg/100 m with a diameter of 6 mm. The designed maximum payload of the PCDPR is 70 kg, and the goal of this robot is to have capability of handling more than 200 kg. We use industrial real-time controller Beckhoff’s TwinCAT3 to control robot and vacuum pump for heavy payload pick-and-place application.

A photograph of high payload CDPR for pick-and-place application.
Robot kinematics and dynamics
Figure 2(a) shows a schematic of conventional CDPR. Because the PCDPR is a type of parallel robot system, conventional inverse kinematics can be used to describe the joint variable from the given end-effector posture. By assuming the steady-state condition, we can derive a general form of PCDPR inverse kinematic equation, where


A schematic of PCDPR: (a) conventional PCDPR and (b) five-element viscoelastic modeled PCDPR.
And the length of ith cable

where position vector

where
The standard dynamic equation of the PCDPR by assuming that the external force is applied to the end-effector can be obtained by equation (4) in global coordinate of the robot system21,22
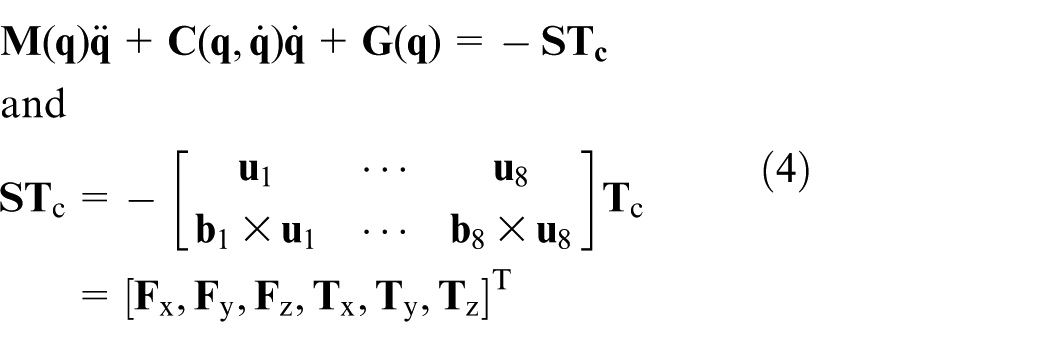
where

where
Numerical quantification of cable deformation effect on Cartesian space position error
Figure 2(b) depicts the suggested viscoelastic model in this article. At the actual PCDPR system, due to viscoelastic deformation of the polymer cable, cable length
Quantification of numerical computation for cable length and end-effector pose error by 65 kg payload.

Viscoelastic modeling for a polymer cable
The cable viscoelastic behavior based on the previous observations of cable viscoelastic properties indicates that elastic deformation is instantaneous but creep is the time-dependent characteristics under the influence of mechanical stresses. This study suggests a modified Burgers model by considering instantaneous elastic property and time-dependent creep property. Although those properties related to polymer cable elongation can be affected by various factors such as type of material property, weight of load, length of cable, and temperature.23,24 We consider the load weight and cable length as important factors for a heavy payload PCDPR in room temperature workspace.
Mathematical cable model
Viscoelastic effect can be modeled by composing spring and damping elements in series and parallel. Among the well-known viscoelastic model, Burgers model consisted of Maxwell and Kelvin–Voigt model is commonly used for describing complicated cable behavior. 25 To properly model viscoelastic behavior of instantaneous response, transient creep, and long-term creep, we propose a five-element model based on modified Burgers model. The model is the serial combination of a linear spring and two Voigt models, thus having instantaneous elastic property by Hookean spring, transient creep by first Voigt model, and long-term creep by second Voigt model as shown in Figure 2(b). According to the superposition principle of the total strain at any time after applying the stress, the strain can be obtained as the sum of those three parts 26

where

where
Experiments for a viscoelastic cable modeling
Some methods for viscosity–elasticity experiments have been available for experimentally driven cable modeling with creep curve.27,28 But those methods have limitations of testing equipment and experiment cable length. In this study, to derive more realistic model for the actual size PCDPR system, we used actual winch–cable–pulley system and a crane for loading and unloading weight blocks in the full designed operating range.
Figure 3 shows the experimental setup for the viscoelastic behavior test for a single cable. The cable starts from the fixed winch and passes through the pulleys to the hook of the testing mass. For loading, the crane moves down and for unloading, the crane moves up to the initial position. A precise 6-DOF displacement measurement sensor, Optical Track Sensor (OTS; model: Polaris Spectra from NDI®; root mean square (RMS) is 0.3 mm, sampling rate is 60 Hz), is used, and its sensor tool with four ball markers is fixed at the cable (reference tool) and profile (global tool). We used two different experiments for different loads and lengths. For a fixed cable length, different payloads are applied one by one and repeated for other length cable with the same payload conditions. All the measurements are measured simultaneously. The maximum total loads can be more than 100 kg including nine weight blocks and middle bar, but by considering the safety factor, the testing weights were between 11.6 and 71.2 kg in each cable. We conducted cable length tests for three different cable lengths (5.4, 7.4, and 8.4 m) using different positions of pulleys, considering our current system configuration and operating ranges. Finally, for the given mass and cable length variation, tension and cable length changes on time domain are measured simultaneously. It is found that the parameters are considerably different for the experimented mass and cable lengths due to the nonlinear properties of polymer cable.
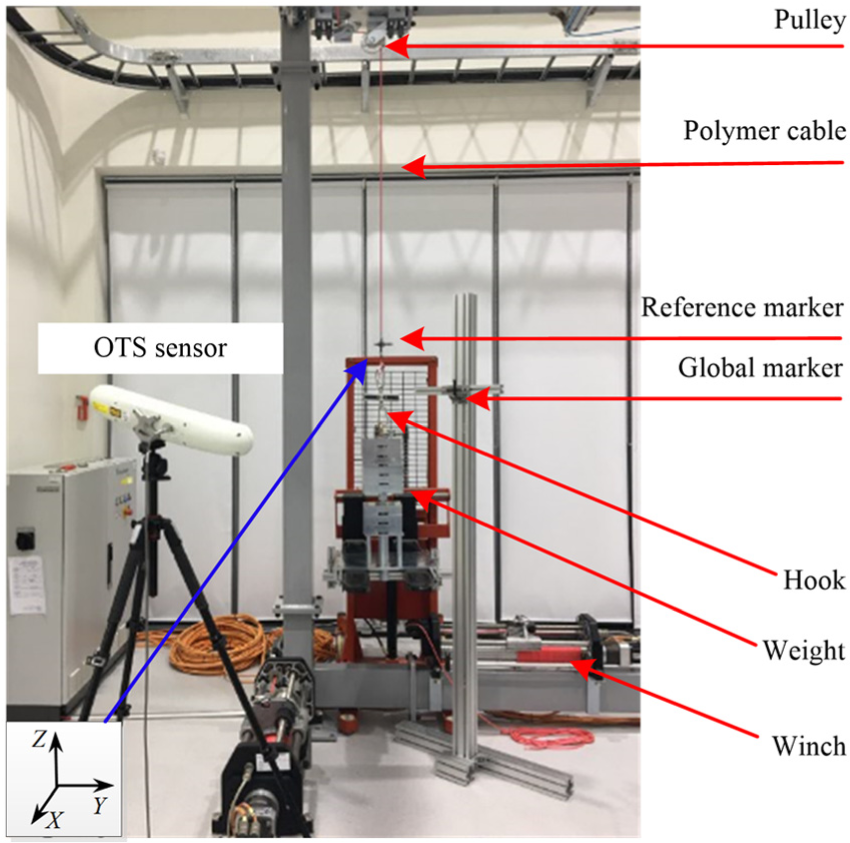
Experimental setup for creeping test.
Model parameter estimation
The suggested viscoelastic model of strain and stress interactions in equation (6) has five parameters to be estimated. To minimize the model parameter to be estimated and enhance the model computation in real-time, sensitivity analysis was accomplished for the model parameters given by equation (8)

where
Results of the sensitivity analysis.

To encounter the force and length variations in the viscoelastic model, the model parameter,

With the computed value of

Figure 4 shows the surface fitted elastic model where red points are the experimental points and green surface is the operating ranges of our PCDPR system. Table 3 shows the data-driven model parameters of equation (6) where the cable viscoelastic model parameters,
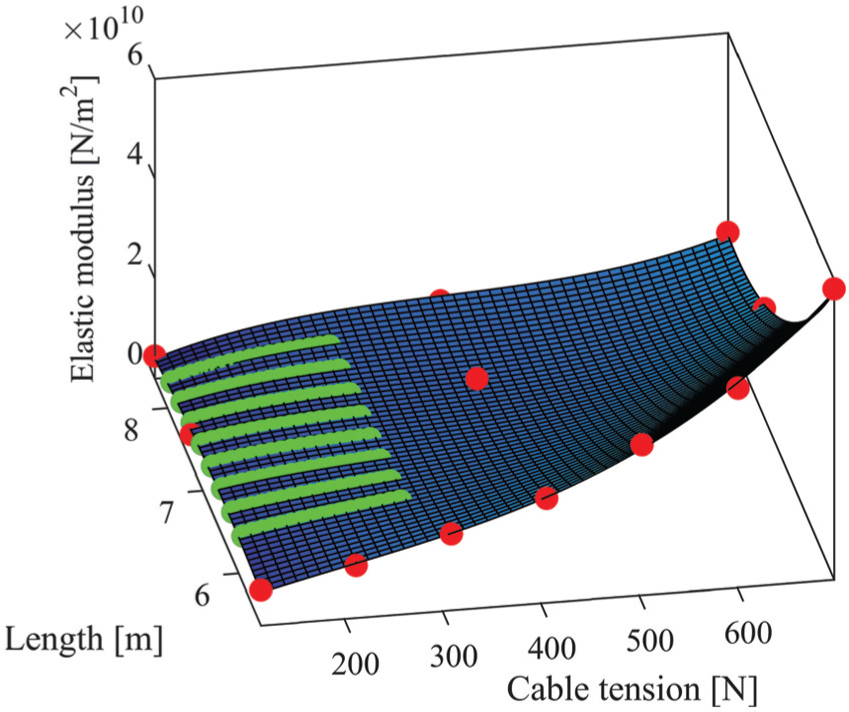
Surface fitting for estimated parameter (E1) for a single cable.
Parameters of polymer cable viscoelastic model.

Elastic modulus parameters for surface function model.


Experimental creep responses and the predictions of the five-element model: (a) creep responses under a series of payloads and (b) creep responses under a series of cable lengths.
Open-loop position control for high payload PCDPR
Controller design
To improve the position control performance, the experimentally driven viscoelastic model is incorporated that can estimate the cable elongation caused by the heavy payload. Advanced feedback control methodologies for CDPR have been studied,29,30 but, in this study, we use an open-loop control. Since the open-loop compensation method is easy to implement and usually can be used in applications where the feedback measurement is not available due to end-effector sensor setting limitation. In short, we note that the given general PCDPR system has no position or force feedback sensor from end-effector. Only an encoder and a pressure sensor to measure winch rotation angle and cable tension at each winch are equipped. Actual postures of the end-effector on global coordinate and actual cable length to compute
Figure 6 shows a block diagram of the suggested open-loop control. The eight cables in the robot system are controlled simultaneously, and the combination of each cable determines end-effector pose. Each cable length
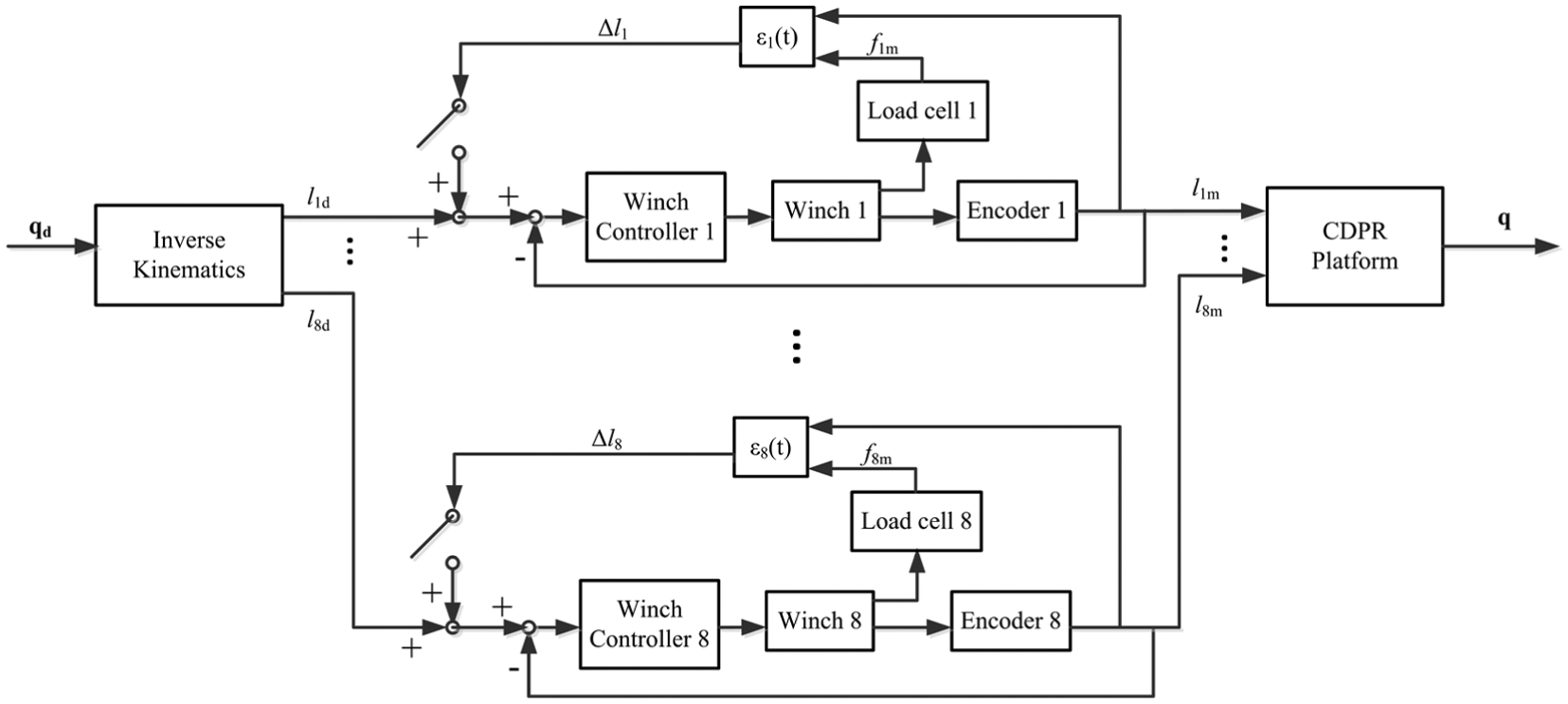
A block diagram of an open-loop position control for cable length compensation.
To elucidate the viscoelastic effect on the controller design in terms of the force distribution of the PCDPR,31,32 we encounter the winch-motor dynamics of equation (5) and transform the encoder space to cable length domain using

However, the actual cable length with cable deformation becomes

Since we can design an open-loop force input as


The amount of force compensation can be computed as equation (15)
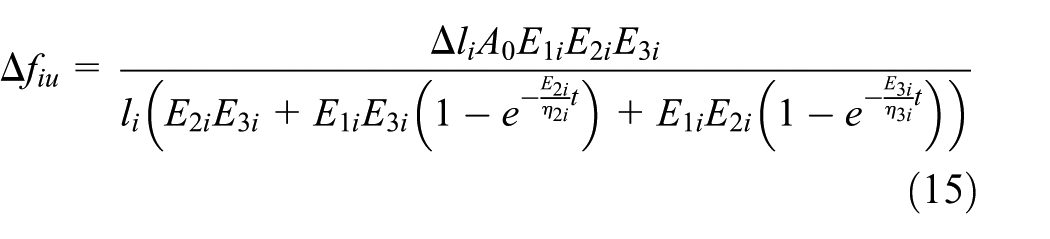
And it can be simplified to equation (16) for the given ending time that is bigger than some seconds

Then, the total open-loop control input in force domain that is transformed by force distribution to end-effector frame can be expressed by
Control experimental setup
The PCDPR system described in Figure 1 is used for the position control experiments. The weight of the end-effector is 5.4 kg with the hexagonal shape payload of 65 kg (total 70.4 kg). Since one of the strong possible candidate applications of the PCDPR system is high payload transportation, we designed a reference trajectory to track as shown in Figure 7 with x-, y-, z-, and

Experimental trajectory and results for pick-and-place experiment.
For the controller performance evaluation, three experiments were conducted by eliminating other factors’ influence of the position accuracy of the cable robot such as pulley friction and pulley kinematics: (a) we run the PCDPR without payload and only have end-effector weight in the desired path which has position error induced by other factors; (b) for the same path with high payload, open-loop control without viscoelastic deformation compensation algorithm was performed, and then (c) for the same path, open-loop control with compensation algorithm was experimented.
Experimental results
Figure 7 depicts resultant end-effector trajectory comparison between viscoelastic deformation compensated open-loop control and uncompensated position control. For the given reference trajectory (blue line), the trajectory of the viscoelastic deformation compensated control (red line) shows strongly closer behavior to the reference trajectory than the uncompensated control (green line). The measured cable length during the experiment and simulated cable length for the case of compensated control and uncompensated control are plotted together in Figure 8. The simulated cable lengths obtained by solving inverse kinematics and viscoelastic models are well matched with actual measurements. Figure 9 shows the measured cable tension during the experiments, in which it is clearly shown that cable tension is also compensated to overcome the viscoelastic deformation error induced by payload as explained in controller design.

Comparison of cable lengths during pick-and-place experiment.
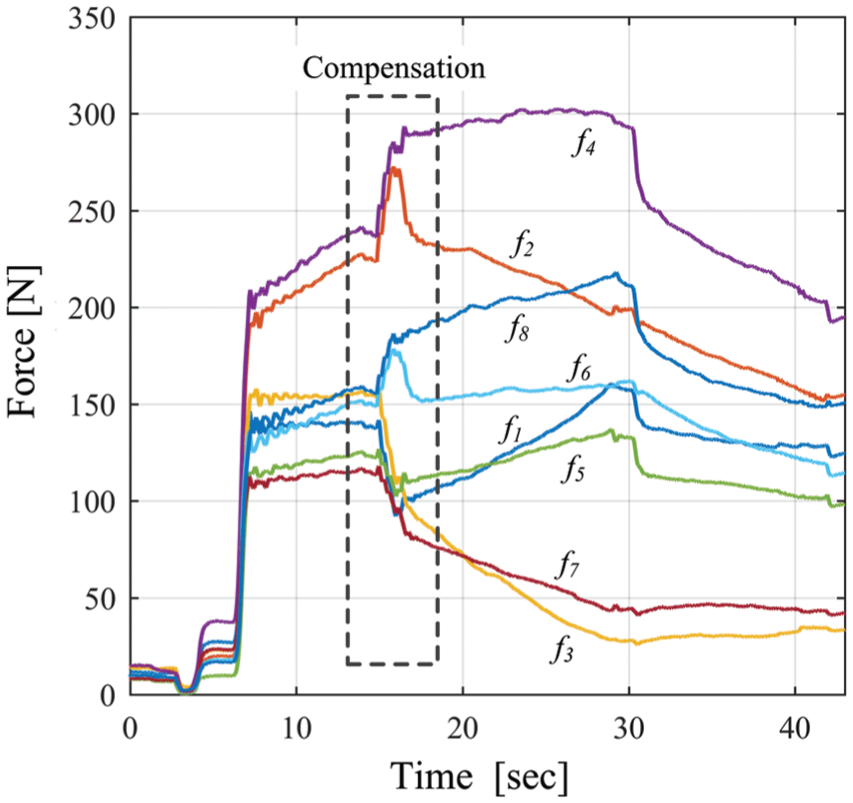
Measured force during the pick-and-place experiments at each cable.
Figure 10 shows position control performances with respect to each coordinate system as x-, y-, z-, and γ-direction. Figure 11 shows the resultant position errors in each direction. The compensation control is activated from 14.8 to 15.8 s when the end-effector reaches around 300 mm high from home position. In this period, since the cable lengths (in Figure 8) and tensions (in Figure 9) are in the range of viscoelastic cable model boundary described in Figure 4, the proposed controller can compensate the position error correctly.

Comparison of the trajectory during pick-and-place experiment: (a) in x-direction, (b) in y-direction, (c) in z-direction, and (d) in γ-direction (compensated at 14.8 s).

Comparison of tracking error during pick-and-place experiment: (a) in x-direction, (b) in y-direction, (c) in z-direction, and (d) in γ-direction (compensated at 14.8 s).
The experimental results are summarized in Table 5. The results indicate that the z-direction deformation is significant than other directional motion when loading the payload; position error is 28.5 mm (9.5%) of the desired position (300 mm). By applying the viscoelastic deformation compensation control, the z-direction error is decreased to less than 1.3 mm that is 0.5% of the reference position. It illustrates that our controller can properly compensate the viscoelastic deformation of the cable when moving a heavy object. However, the position error of the proposed controller in x-, y-, and
RMSE comparison of open-loop position control results for different time span.

RMSE: root mean square error.
Conclusion
In this article, an experiment based on five-element viscoelastic model is proposed to derive a mathematical model of polymer cable deformation for a PCDPR system. The dominant model parameters of the cable viscoelastic model were selected by sensitivity analysis, and the viscoelastic cable model is identified by brute-force method with single cable experiments. The comparison of the obtained model and experimental results of the polymer cable in time domain shows good matches and could be applied to controller design. Furthermore, an open-loop position control was implemented based on the identified viscoelastic cable model. Each cable deformation depending on the payload and the cable length is estimated by the derived cable model, and then the controller compensates the amount of the cable length deformation with respect to the reference position. The experimental results for the position control task under heavy payload showed that the suggested viscoelastic cable model-based open-control scheme can improve position control accuracy significantly, especially in gravity direction. Since the proposed open-loop controller can perform a satisfactory position error reduction for the PCDPR system without having Cartesian space feedback measurements, the study can contribute to implement low-cost practical industrial application of the PCDPR system.
Footnotes
Handling Editor: Yong Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Leading Foreign Research Institute Recruitment Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT (MSIT; no. 2012K1A4A3026740).