
Abstract
In this article, we focus on a suspension active magnetic bearing system that majorly experiences many disturbances. First, we construct a complete model of a suspension active magnetic bearing system composed of conventional proportional–integral–derivative controllers with two kinds of inputs and a robust control method, known as the sliding mode control method. On certain proportional–integral–derivative controllers, the sliding mode control method is used to control linear or nonlinear systems while a chattering phenomenon occurred in each time period. This chattering is due to the high-frequency characteristic of this control method, but it was represented a major disadvantage. Therefore, we propose these techniques for reducing much of this chattering, and then we also propose a fuzzy controller as the control model. In regard to the sliding mode, the fuzzy controller of input and output signals approximates the signals of the proportional–integral–derivative and sliding mode control controller outputs. We also replace the signum function from the saturation function and use the MATLAB Simulink programming environment in our design work. Finally, we compare the average and maximum tracking errors with those of a method proposed by Lin et al. and find that the results of our proposed control method tracks very well with the sinusoidal input signal and also much better than the other method.
Keywords
Introduction
The sliding mode control (SMC), developed in the Soviet Union in the mid-1950s,
1
is one of the most robust control methods available today and has received much attention in recent decades. There are error signals in the SMC input gain while the output is a controller signal for the system. However, the SMC is a powerful technique that drives the system state to a custom-built and then a constraint state of a surface.
2
The system generated on this surface is known as the sliding mode, but the SMC method must ensure that the system works stably on this surface. The variable structure control (VSC) framework
1
can be applied, of using the switching method. In every state, the sliding mode will adapt to outside disturbances within finite-time convergent and can be described by a reducing order equation. The most important aspect here is the chosen sliding surface technique. In this article, we propose the use of a specified proportional–integral–derivative (PID) controller intended to solve the chattering problem, in which
To function without contacts or frictions, the magnetic suspension offers the potential for many applications in typical electromechanical products, including the turbine engine and flywheel, as well as other practical applications such as computer numerical control (CNC) machines and the artificial heart pump. In the artificial heart pump, the device assists the left ventricular chamber to maintain the rate of the blood flow.3,4 The suspension structure includes two magnets, as shown in Figure 1, one of which is sensorless but with a measurable distance. 5 Our task is to generate a signal for controlling the internal rotor to a predetermined position, within an external disturbance rotor that continues to guide the desired set-up position. The suspension of the active magnetic bearing system (AMBs) generates an electromagnetic field to ensure non-contact between the stationary and rotary parts. A continuous electrical current is required to maintain the electromagnetic field. 5 Some advanced control methods are mentioned in Schweitzer and Maslen, 5 including SMC, integral SMC (ISMC), feedback linearization with an ISMC, PID-like neural networks, and robust nonsingular terminal sliding mode control (RNTSMC). Thus, we have compared one of the above author’s methods 6 with our proposed method in parallel. In this study, we also propose the application of performance-flexible control methods, such as the PID and fuzzy-based PID surface sliding mode control (PIDFSMC) methods, for controlling the suspension active magnetic bearing (SAMB) system, which has two tools with which to reduce the chattering phenomenon.

The structure of magnetic bearing system.
Figure 1 shows a structure diagram of a suspension magnetic bearing system, exemplified that found in the axis of the active magnetic bearing system. The active magnetic bearing, as described in Chen and Lin, 7 consists of a rotor, stator, sensors, controllers, and amplifiers. The sensor measures the eddy-current phenomenon while operating to determine distances between the rotor and stator; wherein the sensor’s input signal is distance and the output is voltage, and the sensor signal is transmitted to the controller. Then, the controller processes the signal and generates a suitable signal for maintaining the rotor. In this study, we have used a switching-type amplifier to increase the power of the control signal that drives the electromagnet coil current. To solve this problem, we propose a specified PID control method combined with the SMC method. Unfortunately, the chattering always occurs during operation, since we use the fuzzy method for ill-defined tuning.8,9 In addition, we use a sign function to reduce the chattering factor and majorly use PID and fuzzy methods based on the PID-surface SMC to solve this troublesome. Finally, we compare our results with those of two other kinds of SMCs to better approaching the effect of the fuzzy method.
Mathematical modeling of SAMB system
We mathematically constructed our suspension AMB based on work found in the literature5,10,11 B+, and B− are, upper and lower components of the magnetic density vector, respectively. From Figure 1, we have

So

Using Taylor expansion of (2), we got

with
Following Newton’s second law

where
Combining equations (2), (3), and (6), we have equations (7) and (8)


We denote

or

where
From equation (10), we separate nominal and uncertainties system such as equation (11)



E is lumped uncertainties
7
and give a hitting gain

From equations (10) to (14), the system generates satisfactory sliding mode types. Then, we propose the PID and SMC methods for their controls. Subsequently, we have tested the outside disturbances within the operational time periods, which always experienced the chattering phenomenon. To reduce this chattering and to realize a steadier state, we simultaneously applied the fuzzy method and the saturation function to improve performance.
Proposed approach
The design procedures could be described as follows: first, we designed a PID controller combined with a PID-s SMC, and then constructed our control method by replacing the signum function with the saturation function. Finally, we have used the fuzzy-based PID-s SMC for the suspension of the active magnetic bearing system to achieve the desired goal. Details of these three steps are provided below:
Step 1. PID controller design
Conventional PID controllers have been applied to many areas of control science research, and there are three kinds of mathematical errors that must be known: proportional errors for calculating future errors, integral errors to calculate past errors, and derivative or amplified errors. These can be described as follows

Next, we propose a more powerful sliding mode controller.
Step 2. SMC method design
The SMC method is a robustness control method. We primarily chose PID application in this paper as following.

The PID-surface (17) is selected in this design
where
To guarantee the stability of the system, consider the following Lyapunov function


and
The current is calculated as

In each time step during the running processes, they can also find external disturbances that have resulted in internal noise effects on the system. The SMC method operated at high frequency causes the chattering phenomenon in practical systems. 14 To realize stable system operation, we apply the saturation function as a filter for the chattering.
Step 3. Design saturation function
During periods of operation, the system state continuously produces chattering. To realize more stability, we use a saturation function to replace the signum function, as in Azar and Zhu 15 Thus, we propose using the saturation function rather than sign function in equation (19). The saturation function is defined as follows.
Within sat function perform as smooth function

For improving influenced signal, we also construct the fuzzy method to reduce the chattering.
Step 4. Fuzzy design for filter signal
Fuzzy logic is another practical mathematical addition to classic Boolean logic.
16
In many studies that are applicable to this one, each of the curves is described by several parameters that define the current curve shape.
17
Here, we opted to test the Gaussian curve membership function, gaussmf. With sat(s) as the input signal approaching zero and the output signal
Rule 1: IF sat (s) is NB or sat (s) is PM, THEN
Rule 2: IF sat (s) is NM or sat (s) is PB or sat (s) is ZO, THEN
Rule 3: IF sat (s) is ZO or sat (s) is NM or sat (s) is PM, THEN
Rule 4: IF sat (s) is PM or sat (s) is ZO or sat (s) is NB, THEN
Rule 5: IF sat (s) is PB or sat (s) is NM, THEN
where

Fuzzy membership functions (a) input and (b) output.
Now
The control system is proposed in Figure 3.
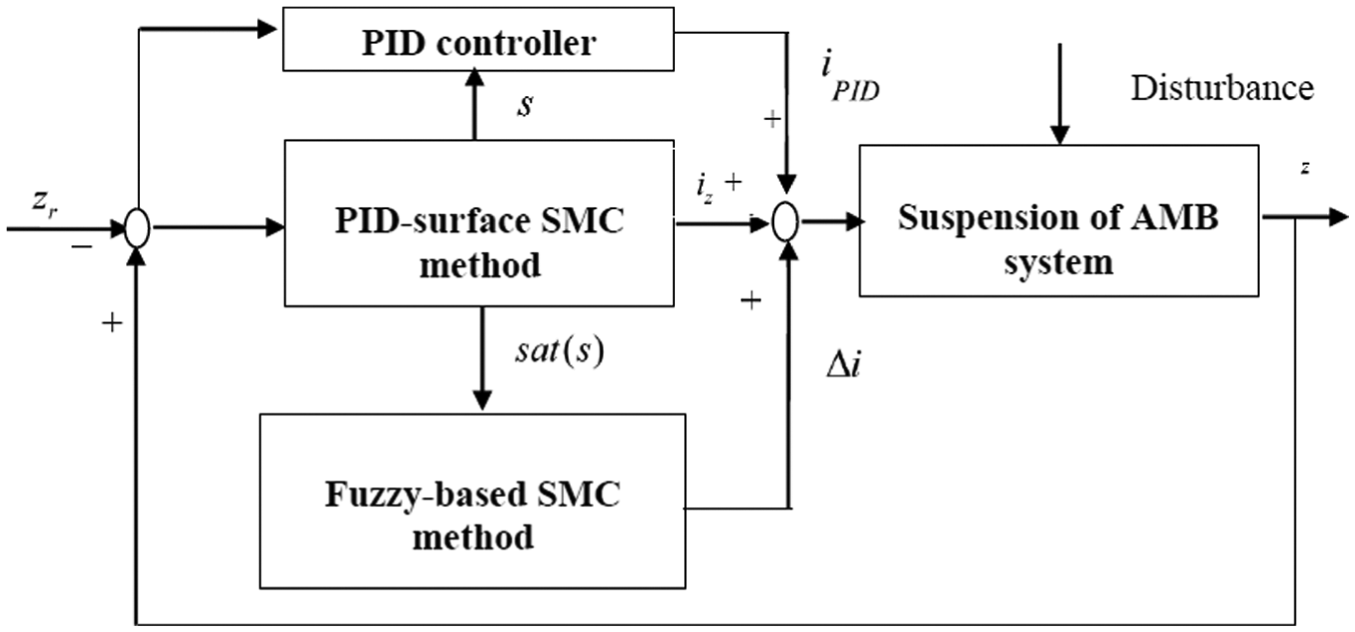
Fuzzy-based PID-surface SMC.
We have the control current such as

To alleviate chattering, we add more a control current from fuzzy controller output such as a toll to be achieved. Disturbances will occur suddenly by the forces at point’s time and simulation results will point out that PIDFSMC has quite good performance. Then, we have created the system and controller parameters, which are shown in Table 1.
Controller parameters.

Based on Figure 4, we can see that PIDFSMC is quite good to track the following referenced inputting signals, and besides, we have specified a fuzzy controller to approximated PID and SMC controller output signal, while at the first period of times we finally have received overshoot likely equal to zero. At every next step, we also have similar, especially the tracking error signal value very small, much smaller than Lin et al. 6 In case, on the other hand, we apply SMC controller only, which will get much more chattering and the steady state is not good enough than compared with the method that finally is approximately signal by the fuzzy logic controller. For much more details about the simulated results, we keep taking 10 s a look at the tracking error value such as in Figure 5.

(a) PIDFSMC distance response at case 1 and (b) PIDFSMC distance at case 2.

(a) PIDFSMC transient distance tracking error for case 1 and (b) PIDFSMC transient distance tracking error for case 2.
We have proved that the PIDFSMC is suitable to construct active magnetic bearing control system, under uncertainties, and disturbance. As to the first period of time with smaller tracking error value and best period of tracking error value, the performance of the fuzzy controller has effected on fraction order to reduce overshoot at the first time and gets a small average distance tracking error as well. In Figure 5(a), the performed distance tracking error value is very clear and the system state is also very stable within no outside force. We also have proposed the method that has an average value of tracking distance error, such as in Table 2.

PIDFSMC: PID surface sliding mode control; RNTSMC: robust nonsingular terminal sliding mode control.
From Table 2, the proposed method has obtained the best performance with the distance tracking average values and error top values than those of Lin and colleagues.6,7
Conclusion
In this article, PID/fuzzy sliding mode control for suspension of active magnetic bearing system has been proposed. A sat function replaces the signum function for an input signal of a PID surface sliding mode controller. The result is obtained for improving settling time. The fuzzy controller reduces chattering successfully. As a result, the proposed method has shown the effectiveness with decrease in the distance tracking average values and error top values for suspension of the active magnetic bearing systems.
Footnotes
Handling Editor: James Barufaldi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.