
Abstract
In a robot teleoperation system, humans operate and respond by relying on the content displayed on the video screen. However, unavoidable delays, such as network transmission, cause asynchronous communication between humans and robot and further result in human operation errors such as redundant or duplicate operations or even wrong commands. Users of consumer electronics in daily life are different from users in large-scale industry as they may not be experts or even trained to use the robots leading to new challenges in developing home-used robots. In this study, a module-based remote control system is designed to illustrate the possible human operation errors caused by transmission delay of transmission control protocol/Internet protocol–based network and to provide a user-friendly framework for simulating solutions to improve human errors. This is followed by proposing two target prediction methods, namely the target area predictor and stop position predictor, to decrease the human errors. The experimental results show that target area predictor and stop position predictor effectively improve the performance by reducing task completion time and object trajectory errors by 60% and 36%, respectively.
Introduction
Robots are used in manufacturing industry and agriculture to reduce labor costs and improve standardization of a work process. Robots replace humans in performing repetitive and dangerous tasks (such as welding, painting, assembly, and testing) or tasks that humans are unable to perform due to size limitation or extreme environments (such as outer space and underwater). Advances in technology and cost reductions in software and hardware development led to the use of robots in daily life. Examples include social robots, 1 healthcare robots,2,3 and medical robots.4,5 The technology of autonomous robots is under sustained development. However, all tasks cannot be completed by autonomous robots due to constraints of costs, variability, and flexibility. With the implementation of remote control technology, it is possible to accomplish the tasks that cannot be autonomously performed. To date, several remote control robot applications exist and include remote surgery,5–7 remote astronautic robot,8,9 telemedicine, and others.4,10,11
Previously, most remote control applications in consumer electronics were used to operate devices, such as a television set, DVD player, or other home appliances, 12 from a short distance. Advances in network and mobile devices have led to the increasing use of long-distance remote control applications. However, long-distance remote controls are affected by the transmission speed or network delays, thereby causing inefficient operation or even wrong commands. Consequently, it is essential to solve the delay in the network. There are several existing applications where robots are remotely controlled. However, the operators of these applications include trained experts such as doctors and engineers. It is expected that an improvement in technology will lead to the adoption of the remote control system in specialized fields as well as in daily life. This type of remote control system exhibits many differences from the professional system. In order to make it more accessible to the public, it should be easy to operate such that users need not undergo any tough training processes. In this study, a remote control system that lowers the threshold of operational technique is proposed to ensure that remote control robots are handier for normal individuals.
In the study, the basic structure of a remote control system is first introduced, and the possible human operation errors caused by network delays are analyzed. This is followed by specifying the manner in which a human action predicting method automatically fixes mistakes resulting from human errors. Furthermore, the study describes a virtual environment for the remote control system that can simulate several methods to easily and promptly improve the remote error. The aim of this study involves solving the problem of asynchronous workspace between local and remote environments. Two action predictors are proposed that can predict the conduct of users during a teleoperation in a real network environment. According to the network delay, the real action that is adopted by users is predicted. This is followed by modifying commands sent from users such that the executed result is the same as that expected by users. A human simulator is developed in addition to the prediction model. The simulator simulates the action that a user performs in a remote control system. The simulator aids in measuring the accuracy of the prediction model.
The rest of this article is organized as follows. Section “System overview” gives an overview including an example of transmission delay problem and the system architecture of remote control systems. Section “Proposed solutions” describes our proposed solutions, target area predictor (TAP), and stop position predictor (SPP). To evaluate TAP and SPP, a human simulator is developed and the results are presented in section “Performance evaluations.” The last section is the conclusion.
System overview
Problem description
In a robot teleoperation system, a human operates to respond to the scene observed on a video screen. However, network delays result in a difference between video and actual environment. As shown in Figure 1, the video delay in a video call approximately corresponds to 250 ms with a strong signal, and the video delay approximately corresponds to 3000 ms or more with a weak signal. The video delay causes significant differences between local and remote environments. Thus, operators cannot take correct actions to complete the task. For example, the operator wants to move an object from point

Video delay of FaceTime, Skype, and Hangout over WiFi: (a) FaceTime—strong signal, (b) Google+ Hangout—strong signal, (c) Skype—strong signal, (d) FaceTime—weak signal, (e) Google+ Hangout—weak signal, and (f) Skype—weak signal. 13

Asynchronous actions between local workspace and remote workspace.
A testing program is designed to record a user’s actions during remote manipulation with network delays. The goal of the mission involves moving the object along a fixed axis to a predefined position. However, the position of the object is inconsistent between local and remote sites due to poor network transmissions as shown in Figure 3. The charts denote the position of the object seen by users, the actions performed by the user, and the real position of the object at the remote site. In the testing program, it is assumed that the video delay corresponds to 1000 ms. At time
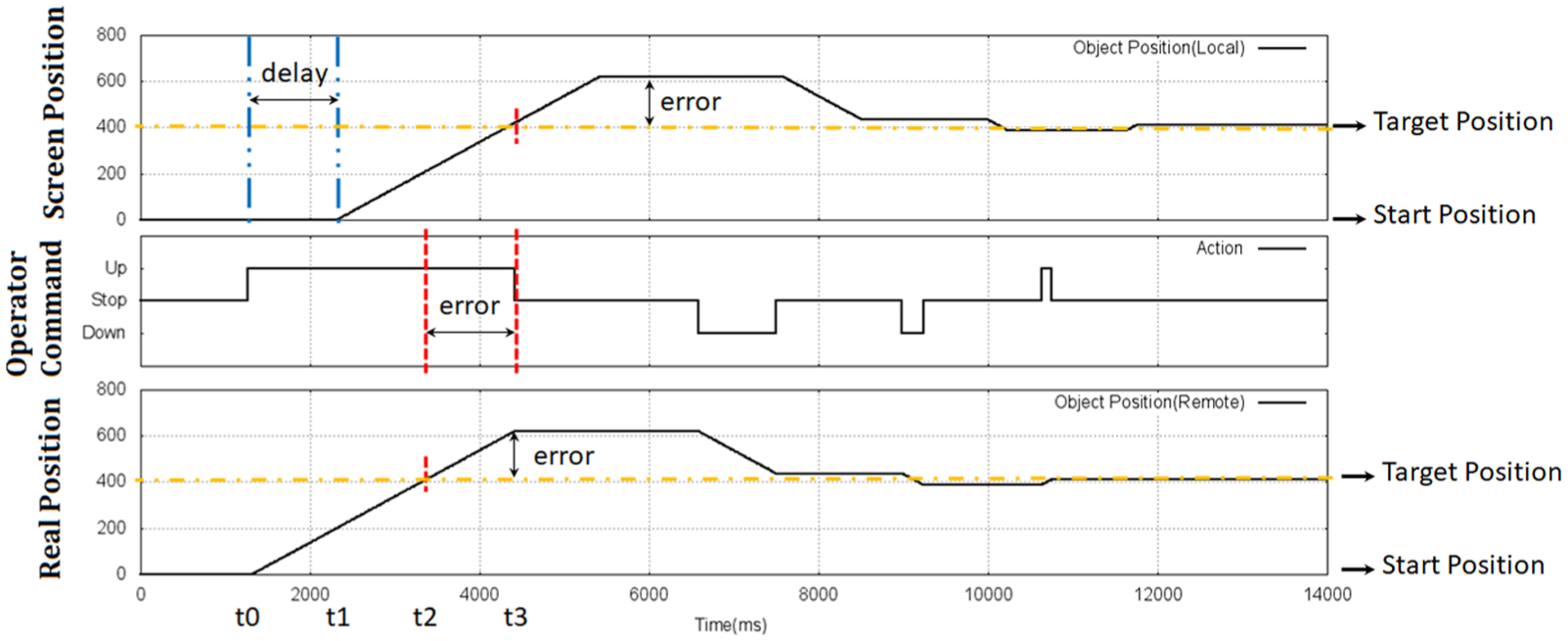
Operation errors caused by video delay.
System architecture
In the study, a remote control application is developed and adopted to client/server architecture. Figure 4 shows the system architecture of the application. The operator observed an object scene and moves the object to a specific position by sending transmission control protocol (TCP) commands to the remote application. The remote application parses commands received from the local application and moves the object on the scene. Simultaneously, an object scene capturer and a real-time transport protocol transmitter record the scene and periodically send the object scene to the local application.

System architecture of remote control applications.
In order to solve the asynchronous workspace between local and remote, two methods were proposed to improve human control error. The first method is termed as a TAP. The TAP is used to estimate the bound of the target area. After obtaining the bound, the object is limited in a small area. The second method is termed as an SPP. The stop position is predicted, and this corresponds to the operator’s goal. The object velocity slows down while moving the object close to the point. Hence, the operator has more time to react to the video delay.
It is assumed that the network delay time in the system is known as shown in Figure 5. Thus,

Analysis of delays.
Proposed solutions
Target Area Predictor (TAP)
In the remote control assumption, it is not necessary for the operators to perform mutual actions to complete a mission. For example, there is a task that involves horizontally moving the object toward its right from position
As mentioned above, the only necessary action in the task involves moving toward the right. It is surmised that the object exceeds the target position when the operators move the object toward the left. As shown in Figure 6, the object is at position

An example of setting predicted target area.
When the expected target position interval is realized, the object movement is limited in the range between the intervals. As a result, the object trajectory error reduces.
Recovery mechanism of TAP
There is a worst case that the operator cannot move the object to correct position with TAP constantly when the predicted target area is incorrect. As shown in Figure 7, the object is at position within incorrect predicted target area. However, the correct target position that the operator wants to reach corresponds to position Y. The object cannot be moved to position Y because of TAP boundary. Hence, a recovery mechanism that can enlarge the expected interval is designed.

Incorrect prediction target area.
With TAP, the object stops when it reaches the limited bound in the remote site. Nevertheless, the operator at that moment observes that the object has not reached the bound. Thus, the operator continuously moves the object. However, it is inferred that the operator wants to move the object to exceed the bound if the operator is still moving the object after a period of time when the object reaches the bound. The period of time is calculated from the network delay. As shown in Figure 8, the object is at position

An example of TAP recovery.

Stop Position Predictor (SPP)
In addition to the TAP, a method to predict the target position that the operator wants to reach is also proposed. With this predictor, the control system can adjust the velocity of the object such that it slows down in a particular range. Subsequently, the operator moves the object accurately as shown in Figure 9.

Reduce object’s velocity in SPP.
It is assumed that the operator does not realize that there are network delays, and thus the operator stops moving the object when the object is at the target position. However, the object does not stop at the target position due to a network delay. The object stops at the target position plus a redundant displacement. The redundant displacement

where

where
Figure 10 is considered as an example. The operator wants to move the object to target position TP such that he or she starts moving the object toward the right in the beginning. At time


An example of SPP.

SPP with compensation.
SPP with regulation
We found that an increase in the number of operations causes the operators to move more accurately. In other words, the operators adapt the network delay gradually in the process of task and therefore stop moving the object before the object reaches the target position as shown in Figure 11. Thus, this situation should be included in the previous equations.
We developed a test program in which human subjects are required to complete a task that involves moving an object to a particular position. The human subjects only have a chance to move the object in every iteration. Human subjects are required to repeat the task 10 times. The human subjects include eight computer science students. In the first experiments, there is no network delay and the deviation from the target position to the final position was calculated. As shown in Figure 12, the average of deviation without network delay is almost fixed that implies a fixed operation error existing when human operates machine even though there is no network delay.

Average of operation errors with/without network delay.
In the second experiment, the network delay is considered and the average of deviation with network delay decreases because the operators adapt to the effect of network delay and thus move the object more accurately. Based on this experiment, a regulation function

where n denotes the number of operations, and
The static position of the object with operator regulation

and

where
So the modified predicted target position

The functions of SPP are described in Algorithm 2.

Performance evaluations
Human simulator
In order to measure the performance of the proposed solutions, a human simulator was developed. In the simulator, an action model of the tasks performed by operators in a remote control task was designed. The results in Figure 12 indicated that the operators cannot move the object to a specific position accurately in a smooth control. Thus, the operators are unable to precisely move the object even in an environment without network delay. It is assumed that the operator wants to move the object to a target position

After obtaining

where

However, the results show that the operators automatically fix the target position
The original mean of the normal distribution in equation (7) corresponds to the target position

The modified object static position

The human simulator aids in measuring the performance of the proposed solutions in the remote control system.
Simulations
The task of our simulations is to move an object from a starting position to a specific target position without restriction on number of operations. The human simulator is used to execute the task for 100 times. Algorithm 3 shows the flow of controlling the movement of an object by adopting TAP or SPP or both. First, there is a boundary checking function to ensure that the object will stay in the movable area for each operators command. Then, two flags, enableTAP and enableSPP are used to decide whether TAP or SPP or both are applied to decide the movement of object. The functions TAP and SPP are described in Algorithm 1 and 2, respectively.


Results and analysis
We consider two performance metrics: task completion time and redundant object trajectory. Task completion time is the length of time starting from the operators first command until the object is placed in the target position correctly. Redundant object trajectory is the difference between the total trajectory length and the shortest path from starting position to target position. The total trajectory is defined as the accumulated movement length of the object starting from the first operators command until the object is placed in the target position. Without loss of generality, the redundant object trajectory is presented by pixel/V0.
Figures 13 and 14 show the performances on task completion time and trajectory errors, respectively. Enable TAP or SPP or both are compared with original which has no improved methods adopted. From Figures 13 and 14, we can see that TAP cannot shorten the task completion time because TAP only limits the objects movement boundary. The benefit of TAP is that the trajectory error of the objects motion trail is reduced by 8%. However, SPP improves both task completion time and trajectory errors. This is because SPP decreases the velocity of object to reduce the impact of network delay so that the operator can control the object more precisely. The results indicated that the task completion time is reduced by 36% and the trajectory error is reduced by 60% with SPP.

Performances on task completion time.

Performances on object trajectory errors.
Conclusion
A remote control system is developed in this study. The system can be used to observe the actions adopted by operators during remote manipulation. A network simulator is also adopted in the system to ensure that observations are more realistic. In the system, a task is designed that requires the operator to move an object to a specific position. Data related to objects, such as motion trail, were collected in the process of the task, and the completion time of a task is measured.
A human simulator was also developed in addition to the remote control system. The simulator generates control commands that can achieve the above-mentioned task. A human action model proposed in the study is used in the simulator. Two experiments were designed to observe the performance of the operators in remote manipulation. The simulator allows examining the correctness of the proposed solutions in the remote control system. Furthermore, the performance of the prediction model was also evaluated.
Future studies will involve collecting more realistic human data. In the study, only human data from a specific group, namely computer science students, was collected. Subjects in other groups should be invited. Thus, the human simulator can act in a manner similar to a real human. The advantage of improving the human simulator involves making the proposed solutions more convincing. To date, the proposed solution was only adopted in a virtual environment. The prediction model should only be used in a real environment such as robot arms.
Footnotes
Handling Editor: Stephen D Prior
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.