
Abstract
The aim of this study is to evaluate gas path diagnostic techniques using a principle of variable structure classification applied to cover possible fault scenarios in gas turbine maintenance. This principle allows creating more versatile and realistic fault conditions relative to existing studies such as complex fault classifications, a new boundary for fault severity, and real deviation errors. The techniques analyzed are included into a special procedure that repeats a diagnostic process many times and computes for each fault class a probability of correct diagnosis. Using this probability averaged for all the classes as the evaluation criterion, the techniques are tested under the conditions of four comparative studies. The results show that (a) there is no single technique significantly outperforming all others over the full range of diagnostic conditions even if engine operating modes, fault simulation data, fault classifications, multiple-class boundaries or the scheme of deviation errors are varied; (b) the common level of diagnosis accuracy greatly depends on the fault classification used; (c) significant influence of fault severity boundary is found. The boundary proposed makes the level of accuracy much more realistic compared to simplified boundaries previously used; and (d) the use of real deviation noise in fault class description instead of simulated errors further approaches the diagnostic conditions and results to the level expected in practice.
Keywords
Introduction
Important gas turbine aspects such as reliability, safety, maintenance, and operation costs are strongly affected by faults and deterioration. Condition-based maintenance and condition-monitoring systems help mitigate these problems. 1 Diagnostic systems include different approaches such as thermography, boroscopy inspection, vibration and acoustic analysis, diagnostics of fuel and oil systems, wear debris analysis, and gas path analysis (GPA). This last approach has been widely used in the field of gas turbine monitoring. The systems based on GPA collect, filtrate, and intelligently analyze measured gas path variables to monitor the engine, identify incipient problems, and predict future changes. Over the past years, fault identification algorithms have been developed based on diverse pattern recognition and machine learning techniques.2–5 Since gas turbines are very complex machines and need to be monitored, exhaustive comparative studies about diagnostic techniques can give clearer and more solid recommendations on how to construct an effective monitoring system.3,4 Considering this necessity, this investigation evaluates two types of gas path diagnostic techniques: support vector machines (SVMs) and artificial neural networks (ANNs). The ANNs analyzed are multi-layer perceptron (MLP), radial basis network (RBN), and probabilistic neural network (PNN).
Different studies demonstrate that ANNs are outperformed by SVMs in many aspects.6,7 Some of them are as follows: ANNs suffer from multiple local minima while the solution of SVMs is global and unique; ANNs are much more prone to overfitting than SVMs; SVMs have better generalization than ANNs for small number of samples; the geometric interpretation of SVMs is simpler and give sparse solutions; ANNs use empirical risk minimization, while SVMs use structural risk minimization; and unlike of SVMs, the computational complexity of ANNs directly depends on the input space dimensionality.
Despite the above explanations, the intention of the present diagnostic technique evaluation is to address other important issues in the field of gas turbine condition monitoring. First, the theoretical accuracy results provided by other studies are still not sufficient to give a clearer idea to designers, diagnosticians, and engineers on how accurate the diagnostic decisions will be for a wide range of gas turbine diagnostic conditions and how much these conditions affect the techniques employed. Second, the necessity of considering engine fault representations closer to reality is essential in order to produce more truthful and reliable diagnostic assessments.
For this purpose, this study proposes a principle of variable fault classification to study possible fault scenarios present in real gas turbine maintenance and create complex and realistic fault classifications. Through an adaptable algorithm, the variable classification makes it easy to determine the type of class used, different fault parameters, class quantity, fault development directions, fault severity boundary type, engine components and scheme of deviation noise. Based on this principle, 12 classifications of variations have been created for examining themselves and comparing the techniques. These classifications contain single or multiple classes as well as their mixtures. In addition, the study introduces and investigates a new boundary for fault severity. With this boundary, the fault class description becomes more realistic, thus providing more confidence to diagnosis results. This article also addresses the influence of real deviation errors on operation of diagnostic techniques and final diagnosis accuracy. A non-linear thermodynamic model of a stationary power plant for natural gas pipeline applications is used to construct the necessary fault classification.
A special procedure is developed to compare diagnostic techniques and compute the probability of correct diagnosis (true positive rate), which is used as the evaluation criterion. The described diagnostic technique evaluation procedure is implemented in MATLAB that offers convenient toolboxes for both machine learning and pattern recognition assisting in effective algorithm development. 8 Four comparative studies are considered. They analyze the influence of different pattern numbers, operating modes, multiple-class boundaries, and deviation noise schemes. Within each comparative study, the techniques are evaluated for many classification variations. Such analysis allows drawing solid conclusions on techniques’ accuracy.
This article is organized as follows. Section “An overview of ANNs and SVMs” briefly introduces the techniques utilized. Section “Approach for gas turbine fault identification” describes the technique evaluation procedure. Section “Fault classification” presents the gas turbine variable structure fault classification. In section “Technique evaluation results,” the results of the technique evaluation are analyzed.
An overview of ANNs and SVMs
As mentioned above, ANNs and SVMs have been chosen in this study for gas turbine fault recognition. The following subsections briefly describe them. Additional information about these techniques can be found in the literature.7–10
MLP
The MLP consists of a predefined set of input–target pairs and a backpropagation algorithm in the training stage that modifies all weight matrices and bias vectors in the hidden and output layers proportionally to the decreasing gradient of the error function. This update results in the network’s ability to learn relationships between the inputs and outputs. When a new input is presented, the outputs of the nearby learning input vectors determine the new output.
RBN
The RBN is formed by a layer with radial basis function (RBF) neurons and a layer that generates linear combinations of activations of the radial basis layer. The idea of the RBF neurons is to measure how close the input vector and a weight vector are from each other. In the training process, one neuron is iteratively added at a time to the radial basis layer. This new neuron is created by the input vector that obtains the smallest network error. The neuron addition is stopped when a network error decreases below an error goal or when a maximum neuron number has been reached.
PNN
In the PNN, every input vector of the training set forms a new RBF neuron and each output neuron corresponds to one class. Each RBF neuron, which is based on one training pattern, is connected to only one classification neuron corresponding to the class to which the pattern belongs. The sum of all contributions related to the training patterns of the class is a probability of this class. To classify an input vector, a competitive transfer function selects the class with the maximum probability producing a 1 for this class and 0s for the rest.
SVMs
Given training data as pattern vectors and their corresponding labels, the SVM algorithm maps the original input space into a higher dimensional feature space through a kernel function to separate the data there with a maximum-margin hyperplane. Since perfect separation is not always possible, the method allows classification errors while a regularization parameter penalizes them. For multi-class problems, the one-versus-one (OVO) strategy can be used by constructing
Approach for gas turbine fault identification
Test case engine
Since the information of real gas turbine faults is not sufficient to form a complete fault description and physical fault simulations can be very expensive, gas path mathematical models are used instead.11,12 With the intention of constructing and investigating the necessary fault classification, this study uses a non-linear thermodynamic model of a turbo-shaft stationary power plant for natural gas pipeline applications. This model was validated against the manufacturer data and identified with real engine data.12,13 The model computes a

A gas turbine is usually diagnosed using its standard measurement system. This allows revealing faulty engine components. In this investigation, five components of the engine shown in Figure 1 are studied: inlet device (ID), compressor (C), combustion chamber (CC), compressor turbine (CT), and power turbine (PT). The six gas path–monitored variables of Table 6 in Appendix 1 are used as input data for diagnosing the engine. They correspond to an engine standard measurement system. To simulate gas path and measurement system faults, the 18 fault parameters from Table 7 are employed. The selection and significance of these fault parameters are based on the fact that they are commonly used in real gas turbine condition monitoring systems (e.g. efficiencies and flow capacities) to diagnose engine component faults. 11

Gas turbine analyzed.
The engine model presented in equation (1) can be simplified by linearizing the non-linear dependence

It relates a vector
Diagnostic technique evaluation procedure
To be evaluated, the recognition techniques are integrated into a stochastic evaluation procedure, which consists of the following main blocks: deviations, fault classification, training, validation, tuning, and final diagnosis accuracy

Diagnostic technique evaluation procedure.
Deviations
Although engine deterioration affects measured and monitored gas path variables, the impact of the changes in operating and environmental conditions is by far more significant. For this reason, a gas turbine diagnostic process usually includes a preliminary stage for computing deviations, which are free of the influence of these conditions, revealing degradation effects.14,15 Deviations are defined as relative differences between measured and engine baseline (healthy state) values. Since the healthy state depends on engine operating conditions, it can be written as

where a vector

where
Although the use of simulated deviation measurement noise in gas turbine diagnostic algorithms is a common practice, real deviation errors can present different distributions that can affect the final diagnosis reliability. A procedure proposed to extract error components from deviations working with real data can be found in Loboda et al.
5
A degraded engine model

Fault classification construction
After generating the model-based normalized deviations, they are used to build fault classifications required for diagnostics. Given that faults vary significantly in practice, it is necessary to describe them using a limited number of classes. 16 Each fault class is constructed from patterns, either with the change in one fault parameter (single-fault class) or with the independent change in some fault parameters (multiple-fault class). This last type of class can be explained by the fact that faults can simultaneously appear in different engine components.
A uniform distribution of fault parameter values inside of interval (0, ±5%) is employed to describe random fault severity. The limit “0” gives the possibility to simulate no-fault states while the limit “±5%” corresponds to the maximal change in the component performances, at which gas turbines lose their operation capacity due to deterioration and faults.11,17 To know whether a current pattern

where
Training and validation
A learning set
Evaluation criterion (diagnosis accuracy)
In an effort to tune and compare all the techniques proposed, an averaged accuracy performance is determined for each of them. The technique analyzed classifies the patterns of the set
Tuning
In order to perform an adequate evaluation, internal parameters of each technique should be tailored to ensure the maximal probability
Fault classification
Fault classification variations
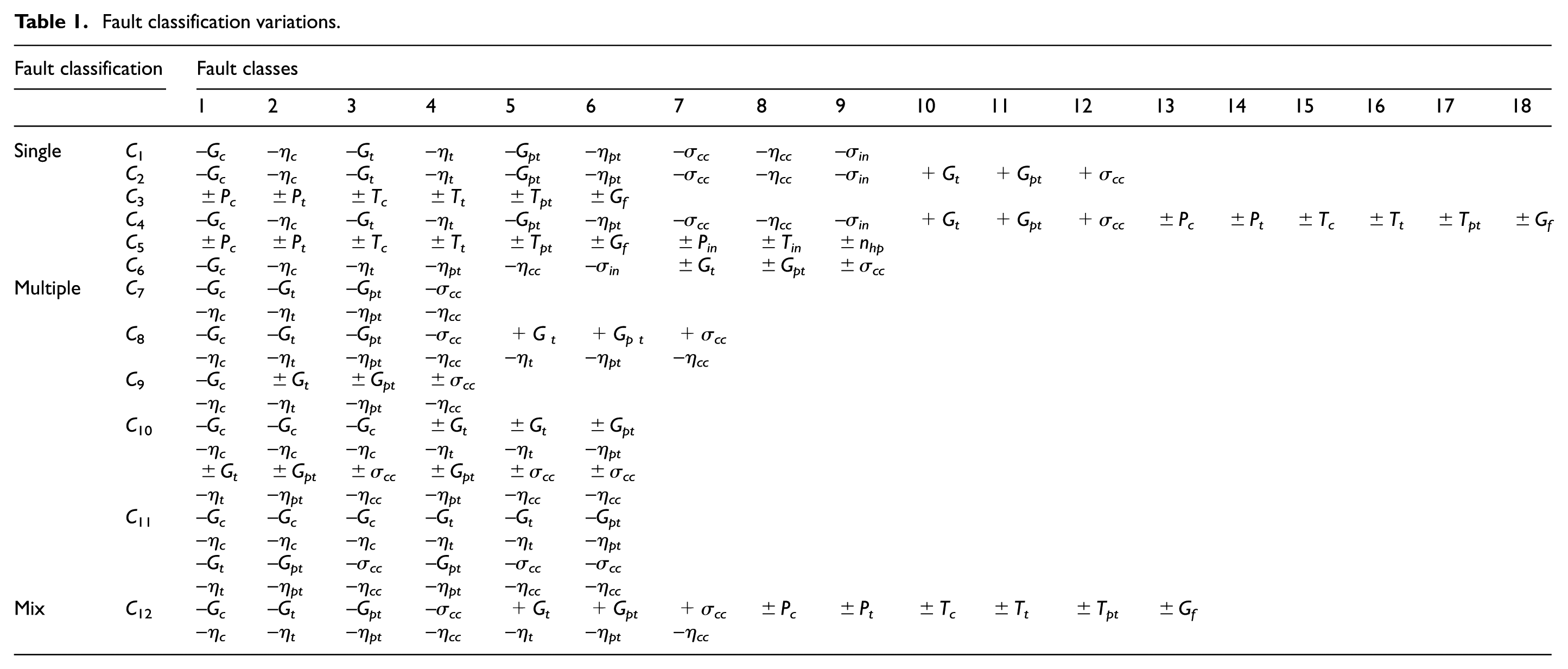
Based on the idea that gas turbine fault classifications vary widely in practice, this article proposes a principle of variable classification through an algorithm that allows changing in a flexible and easy way the following elements: type of class used (single, multiple, or mixed classes), pattern numbers, fault severity, class quantity, fault development directions (positive or negative changes), operating mode, noise scheme in deviations, type of boundary, and engine components. Thus, the algorithm developed can work with more realistic fault classes. With the intention of studying the influence of classification structure on the final diagnostic accuracy of each technique, 12 fault classifications are introduced using this algorithm. These classifications are specified in Table 1 and briefly described below. The fault parameter symbol description can be found in Table 7 in Appendix 1. Figures 3–6 present some classifications plotted in the diagnostic space of
Fault classification variations.
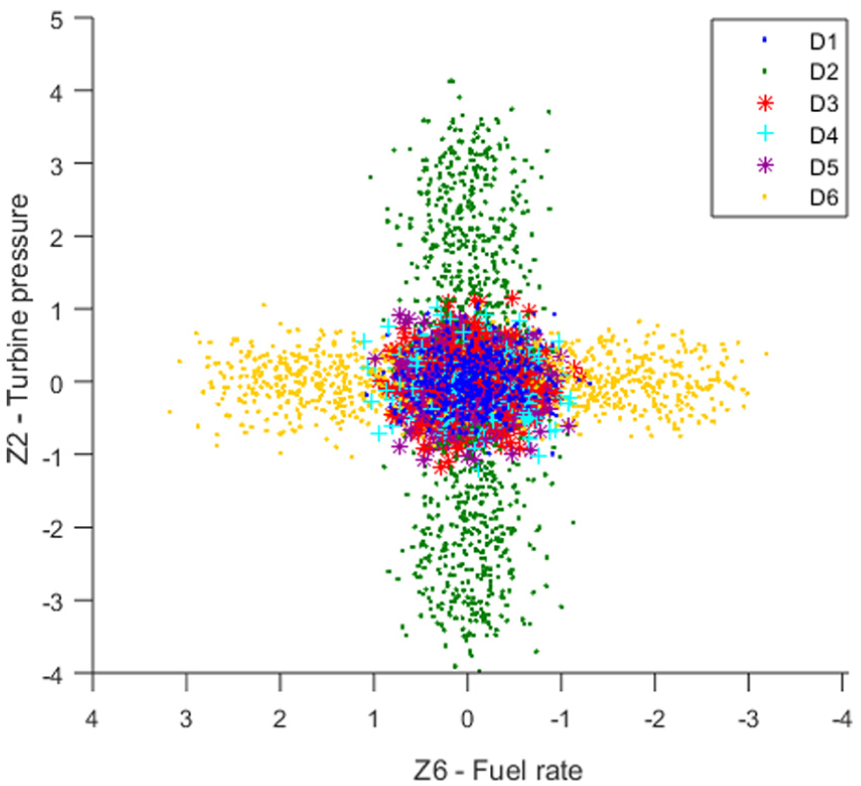
Fault classification 3.

Fault classification 7.

Fault classification 10.

Fault classification 11.
Single-fault classifications
As shown in Table 1, Classification 1 consists of nine single faults. Each fault is created by varying one gas path fault parameter in the negative direction. Classification 2 considers erosion and burnouts of hot part elements that can cause the increase in their flow performances. For this reason, positive changes for flow parameters of the CT, PT, and CC are introduced. With these parameters, three new classes are formed and added to Classification 1 resulting in 12 classes. Due to the frequency of sensor malfunctions, they are recommended to be diagnosed along with gas path faults. Since great measurement biases are easy to identify, only hidden incipient sensor faults are considered (small bias interval of ±5%). In this way, for six monitored variables, six corresponding single classes form Classification 3. Figure 3 shows these six gas path sensor faults; however, only those coinciding with their monitored variables can be completely observed (green and yellow classes). Classification 4 joins Classifications 2 and 3 to build 18 single classes representing gas path faults and sensor malfunctions. Also, sensor malfunctions of operating condition parameters are simulated to take into account their influence on all monitored variables. Three single classes of this sensor fault type are created and joined to the previous six sensor faults (monitored variables) forming nine classes for Classification 5. Classification 6 considers nine classes: one compressor air flow fault, four efficiency faults for all components, one inlet pressure loses factor fault, and finally, three faults with double direction for CT, PT, and CC.
Multiple-fault classifications
Classification 7 includes four multiple classes grouped by engine component: C, CC, CT, and PT (Figure 4). These classes are formed by independent variation in two fault parameters of the same component. Classification 8 contains seven classes formed by three multiple classes with positive changes for flow parameters and their respective efficiencies (Classification 2) and four classes from Classification 7. For Classification 9, four classes are formed as Classification 7 with the difference that flow parameters change in two directions for CT, PT, and CC. Classification 10 contains six classes, each one created by four fault parameters (some of them with two fault development directions). It is formed by all possible combinations of C, CC, CT, and PT (Figure 5). Classification 10 is closer to what really happens in a real gas turbine engine because it considers faults that can occur in two components at the same time. As for Classification 11, it is built in the same manner as the previous classification with the difference that the six classes include negative fault parameter changes (Figure 6).
Single- and multiple-fault classification
Classification 12 works with 13 classes formed with 7 multiple classes from Classification 8 and 6 single classes from Classification 3. The next subsection presents different boundaries used for multiple-fault classifications.
Multiple-class boundaries
When multiple faults are simulated by summing the influence of each fault parameter, there is a risk that the simulated fault exceeds the severity limit of real faults. To better understand the problem, let us consider a multiple class

Three boundaries for multiple classes.
It seems to us that a more appropriate boundary would be a smooth curve. For this reason, a new multiple-class boundary based on the Archimedean spiral is proposed (Figure 7). It is formed by the vector (blue line) that moves from

where
In order to determine the effect of the new boundary, this article analyzes the three boundaries described before. They are named as “straight line” for the triangle area, “no boundary” for the parallelogram area, and “Archimedean” for the new boundary. For all these boundaries, the corresponding classifications are constructed and the four mentioned techniques are applied.
Technique evaluation results
The probability of correct diagnosis (diagnosis accuracy indicator) is used as a criterion to evaluate the performance of each technique in gas turbine fault recognition. Four comparative studies are considered. They are formed by varying
Different pattern numbers
Different operating modes
Different fault boundaries
Different deviation noise schemes
Within each study, in addition to the varying factor, the fault classification changes as well. The variation in the conditions allows drawing solid conclusions about the best technique. The studies are shortly described below.
Different pattern numbers
Accuracy of fault classes’ description depends on the number of simulated patterns; nevertheless, sometimes it is not possible to obtain sufficient data to achieve it.
20
In order to address this hypothetical lack of information and analyze its effect on the diagnosis accuracy for each technique, 10 pattern numbers are analyzed ranging from 100 to 1000 using four classification variations. Initially, calculations are based on 1 seed, which is a parameter for initiating a random number series (one calculation of

Diagnosis accuracy comparison between ANNs and SVMs for different pattern numbers (100 seeds).
Diagnosis accuracy

MLP: multi-layer perceptron; RBN: radial basis network; PNN: probabilistic neural network; SVM: support vector machine.
Also, total average probabilities for only 100 patterns and all classifications are obtained for all the techniques. The results are as follows: 0.7612 for MLP, 0.7883 for RBN, 0.7739 for PNN, and 0.7893 for SVM. Again, SVM obtained slightly better probabilities (2.81% over MLP, 0.1% over RBN, and 1.54% over PNN). However, it is visible that the difference between SVMs and RBN is negligible. This is important because SVMs are generally claimed to have better generalization than ANNs when working with small samples. As a final remark, the increase in the pattern number influenced positively the resolution capability for all techniques (up to 9%). However, a drawback is that more execution time and computer memory are required. This is very notorious in parameter tuning stage because a lot of computations are performed before selecting the most appropriate model giving us the highest probability
Different operating modes
Two gas turbine operating modes, Mode 1 and Mode 2, are studied. They are close to engine maximal and idle regimes and are set by different high-pressure rotor speeds under standard atmospheric conditions. The analysis considers all the classification variations. Based on the above results for pattern numbers, this comparative study only works with 1000 patterns to have more accurate results. The results obtained are presented in Figures 9 and 10 and Table 3. Considering both modes, SVM is slightly better with a total average probability of 0.8146. RBN is the second best technique (being the winner in some classifications) with 0.8099. PNN is in the third position with 0.8065 and MLP is the last technique with 0.8038 of performance. Nevertheless, the difference between all the techniques is not so great (1.08%). Another important observation is that for Mode 2, the probabilities are lower than Mode 1 for most of the classifications. However, the averaged difference between both modes is small (about 0.0088). Besides, the probability behavior of the techniques is almost the same for the two modes through all classifications. Taking into account that the random errors in the stochastic simulation remain small due to the 100 seeds calculation, the results presented can be more reliable. Thus, we can conclude that the change in operating mode of the analyzed gas turbine does not affect the performance of techniques.

Diagnosis accuracy comparison between ANNs and SVMs for operating mode 1 (100 seeds).

Diagnosis accuracy comparison between ANNs and SVMs for operating mode 2 (100 seeds).
Diagnosis accuracy
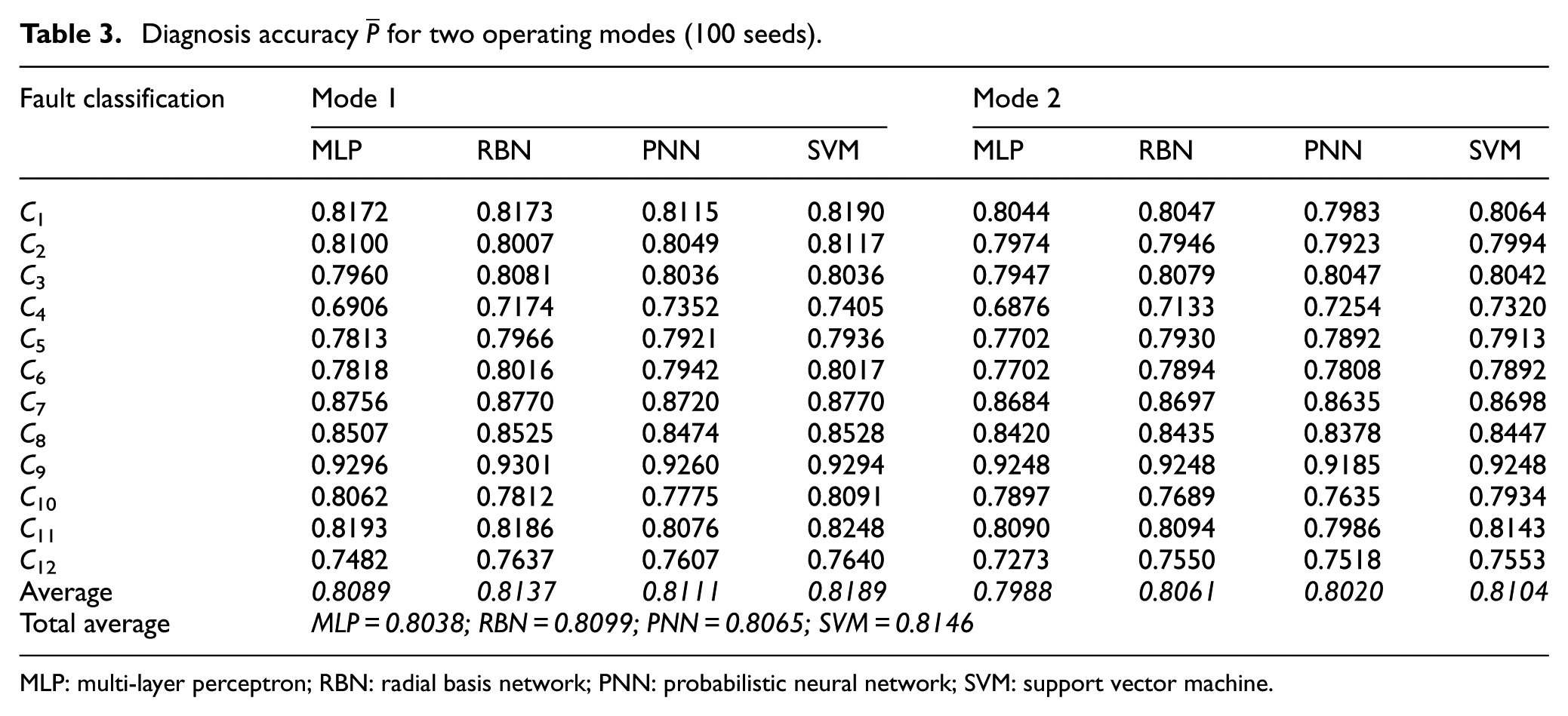
MLP: multi-layer perceptron; RBN: radial basis network; PNN: probabilistic neural network; SVM: support vector machine.
Different fault boundaries
Three boundary options are examined: no boundary (parallelogram area), straight line (triangle area), and Archimedean spiral. They are applied to multiple faults of classification variations 7 and 11. For each boundary and variation, the four techniques are used by turn for computing diagnosis probabilities

Diagnosis accuracy for different boundaries (classification 7).

Diagnosis accuracy for different boundaries (classification 11).
Diagnosis accuracy

MLP: multi-layer perceptron; RBN: radial basis network; PNN: probabilistic neural network; SVM: support vector machine.
Different deviation noise schemes
Two schemes of deviation noise are studied: simulated and real noise. The real noise was extracted from deviations using real data recorded hourly at steady-state operating points of the same gas turbine engine presented in subsection “Test case engine.” The following elements are considered for the comparison: all the fault classifications, maximal operating mode, and 1000 patterns. Table 5 shows the results for both error schemes. Figure 13 presents the results for real deviation errors. The results for the simulated scheme are the same as Figure 9 shown before. Comparing both error representations, one can see a significant increase in diagnosis accuracy for all the techniques (4.66% for MLP, 1.33% for RBN, 2.87% for PNN, and 4.10% for SVM). The total average probability of each technique is obtained as before by averaging both error schemes. The results are 0.8322 for MLP, 0.8203 for RBN, 0.8255 for PNN, and 0.8394 for SVM. Again, the highest value is produced by SVM. However, this time, RBN is the lowest one and MLP has a much better performance than in the case of simulated noise. As mentioned before, the difference between techniques is not so great for simulated errors (about 1.07%), while for real errors is a little bit greater (about 3.29%). This can be proven by analyzing classification-to-classification probabilities. In classification 2, 4, 6 and 12 there are evident differences between the highest value (SVM) and the lowest one (RBN). This means that the use of more realistic deviation noise representation does affect the performance of techniques. In contrast to simulated errors, where RBN is the second best technique, the use of real noise negatively affects the technique being the one with the lowest probability for that case. Besides, it requires more training time than usual.
Diagnosis accuracy
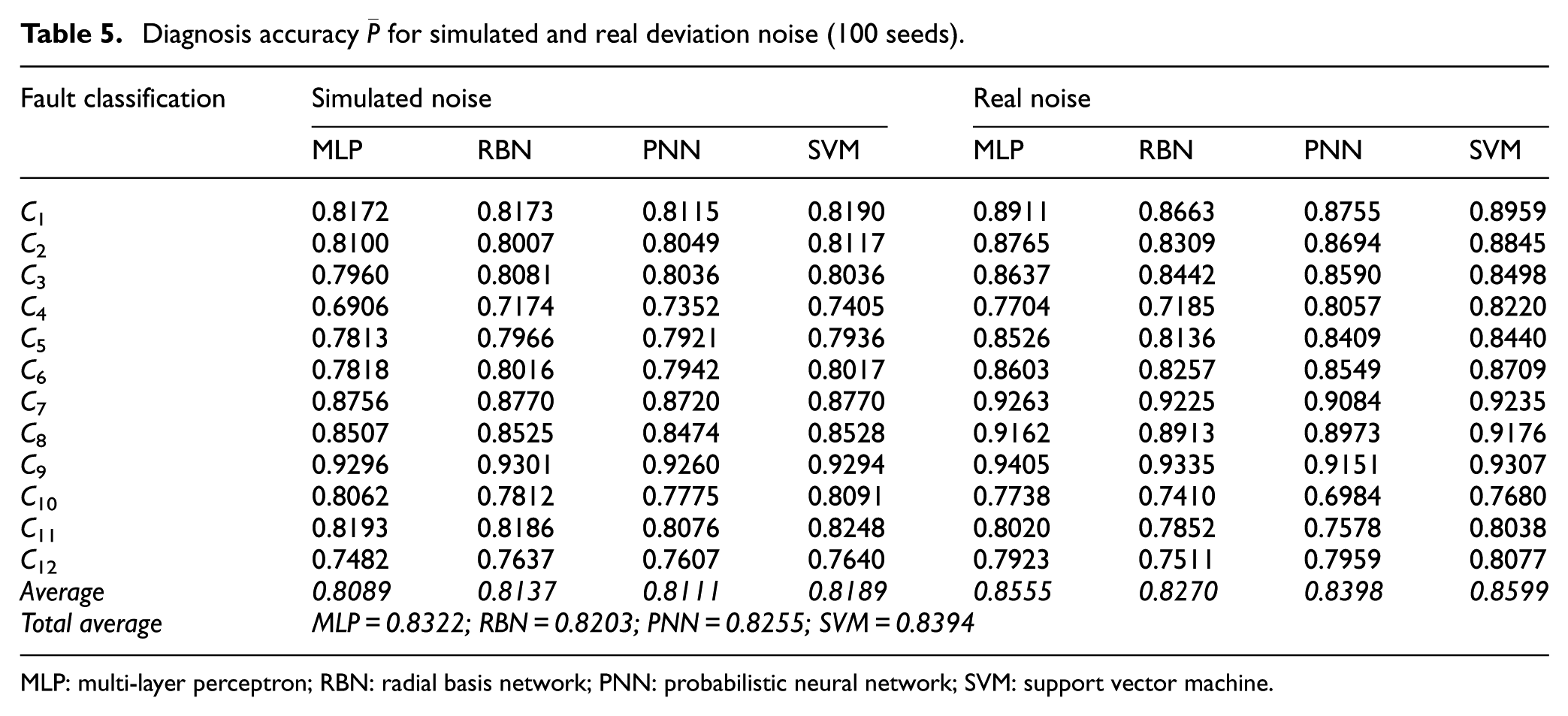
MLP: multi-layer perceptron; RBN: radial basis network; PNN: probabilistic neural network; SVM: support vector machine.

Diagnosis accuracy comparison between ANNs and SVMs for real deviation errors (100 seeds).
Discussion
The following explanations summarize the main contributions of this article:
For variable gas turbine fault conditions, any technique presented in this investigation can be an efficient option. Although SVMs produced better results for all the comparative studies analyzed, the difference between all the techniques in terms of
Based on the principle of variable classification, the results obtained for all the comparative studies confirm that there is a great influence of the fault classifications on the diagnosis accuracy levels. Thus, this article gives an idea on how the theoretical accuracy levels behave for different gas turbine fault identification conditions, serving as a help in the decisions of real engine monitoring designers. The principle allows us to create different classifications with necessary totality of fault classes of different type and complexity. The formation of each new classification and change from one classification to another one is simple and do not need to reprogram the algorithm. In general, the diagnosis probabilities generated for all the classifications are acceptable taking into account that the classes are more complex. This complexity can be seen, for example, in classification 4, where there are up to 18 classes and most of them intersect in the center. Also, the increasing number of fault parameters to form multiple classes and other characteristics such as the number of patterns per class, the fault development directions, and the type of fault class complicate the recognition task for all the techniques.
There is an important effect of fault severity boundary on the probabilities of correct diagnosis. With these results, the new boundary makes the simulation more realistic and allows determining more precisely the level of diagnostic accuracy. The fault severity limits of the multiple classes are smoother, which could be the behavior in real faulty conditions. For this reason, the new boundary is advisable for future works.
The use of real deviation noise in fault class description provides more accurate simulation of a diagnostic process and provides more reliable level of diagnostic accuracy. This real noise scheme significantly changed the final diagnosis accuracy in all the fault classifications and all the techniques as well.
Some proposed works in the near future may involve recent and fast ANNs learning algorithms,21,22 approaches based on deep learning, measurement inaccuracy and deviation error reduction analysis, non-measured gas turbine variables such as thrust and efficiency as alternative parameters for engine condition monitoring, novel signal processing approaches for gas turbine diagnostics, different distributions employed to describe random fault severity, and mixed data-driven and model-based fault classification to have an even more realistic fault recognition problem.
Conclusion
The intention of this study was to evaluate four fault recognition techniques (three ANNs and one SVMs) and analyze how they behave under more versatile, realistic, and complex fault conditions. The ANNs analyzed were MLP, RBN, and PNN. A principle of a variable fault classification was proposed to enhance the representation of real fault scenarios. In all, 12 complex classifications were created considering this principle and used to compare the methods. Also, a new boundary for fault severity was introduced in the fault class description. The techniques were analyzed using a comparison procedure that computed for each of them a probability of correct diagnosis, which was the principal criterion for evaluation. In order to draw concise conclusions, four comparative studies were considered.
The results obtained for multiple comparison cases have shown that nearly always the techniques under analysis are very close using the criterion of correct diagnosis probability. A total level of diagnostic accuracy changed from case to case much more than the differences between the techniques applied to the same comparison case. On average, for all multiple and very different studies, it is concluded that any of the four techniques is a good alternative for gas turbine fault identification. However, in addition to the average accuracy, the SVMs and ANNs have other advantages and disadvantages related to computational requirements and execution time that should be taken into consideration if these techniques are implemented in real monitoring systems. Extensive comparison calculations have also revealed a great influence of fault classifications and fault severity boundary on the level of diagnostic accuracy. The implementation of the new boundary and real errors in deviations makes the engine diagnostic accuracy closer to what occurs in practice.
Footnotes
Appendix 1
Confusion matrix.

| Diagnosis | Classes |
||||
|---|---|---|---|---|---|
| D 1 | D 2 | D 3 | … | Dq | |
| d 1 | Pd 11 | Pd 12 | Pd 13 | … | Pd 1q |
| d 2 | Pd 21 | Pd 22 | Pd 23 | … | Pd 2q |
| d 3 | Pd 31 | Pd 32 | Pd 33 | … | Pd 3q |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋱ | ⋮ |
| dq | Pdq 1 | Pdq 2 | Pdq 3 | … | Pdqq |
Appendix 2
Academic Editor: Pak Wong
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research project was supported by a grant from Instituto Politécnico Nacional and Consejo Nacional de Ciencia y Tecnología (CONACYT).