
Abstract
As one of the major causes of traffic accidents, tire hydroplaning is a key driver safety concern. A tire model 205/55R16 was employed in this study, and a virtual simulation of a deformed half-tire domain for calculating hydroplaning speed was built by virtue of computational fluid dynamics. Water-flow field characteristics were simulated using gas–liquid two-phase flow. The simulated tire hydroplaning speed is in accord with the measured tire hydroplaning data. Guided by the idea that the drag-reduction effect of the V-riblets based on bionic study of shark skin, effects of V-riblet bionic non-smooth surface parameters on water displacement, and flow resistance were analyzed to improve tire tread pattern draining capacity. The water drag-reduction mechanism was declared by the vortex vector and speed field, and the optimal V-riblet surface for drag reduction was set on the bottom circumferential grooves to analyze hydroplaning speed. The results demonstrate that the V-riblet bionic non-smooth surface can effectively decrease tread hydrodynamic pressure when driving on a water-film and increase tire hydroplaning speed.
Introduction
Various traffic safety studies all over the world indicate that about 20% of road accidents occur in wet weather conditions. Although there are no detailed statistics concerning the exact nature of these wet weather hazardous, it is generally believed that tire hydroplaning is one of the major contributing factors. When a tire hydroplanes on wet pavements, the driver loses both steering and braking control. Comprehensive understanding of this phenomenon will help reduce high-risk traffic accidents. Several factors contribute to hydroplaning, including water-film depth, pavement texture properties, and tire characteristics. Many previous studies have been conducted to experimentally investigate the influence of tire characteristics, inflation pressure, driving conditions, and water-film thickness on tire hydroplaning performance. 1 These studies have shed light on different factors affecting hydroplaning and resulted in useful reduction measures, including increased tread pattern width and depth and enlarged pavement grooving. Experimentation on this scale requires a test set-up and strict test specification. In addition, both of which are time consuming. To investigate the hydroplaning performance of a tire, analytical theory, hydroplaning lubrication, viscous lubrication, and boundary layer lubrication have been employed by researchers in previous studies. Unfortunately, due to the non-linearity of fluid flow, there is no strict mathematical model to predict tire deformation, and it is difficult to formulate a description of tire hydroplaning speed. Therefore, many researchers have explored the use of numerical methodology to investigate tire hydroplaning.
Researchers, 2 for example, built a three-dimensional simulation model of the interaction between tire and water flow using computational fluid dynamics (CFD) method. Tire surface deformation was ignored in their model; however, the computational domain remained fixed in time. The influence of hydrodynamic pressure on smooth and grooved tires with deformation was considered and the results were compared with that of the un-deformed tires. The results showed that tire deformation has a big effect on hydrodynamic pressure at higher tire speed. 3 Seta et al. 4 adopted the finite difference method (FDM) and finite element method (FEM) to simulate hydroplaning on thick water-films, under different parameters such as water-flow, speed dependence, and tread pattern effects. They found that a sloped block tip can effectively improve tire hydroplaning performance.
Cho et al. 5 compared hydroplaning speed between different patterned tires, and they found that hydroplaning performance largely depends on the structure parameters of the tread pattern. Fwa et al. 6 established a numerical simulation model using CFD techniques implemented in Fluent to study the effects of vertical and horizontal circumferential groove dimension on hydroplaning. They found that larger groove width and depth and smaller groove spacing can help improve hydroplaning performance. Normally, increasing the number of grooves can improve tread land–ocean comparison and provide large grooves void to drainage surface water and strengthen the force necessary to pierce the water-film. This theory of changing groove design parameters does increase hydroplaning speed; however, this method comes at the cost of crippling other tire performances. Wies et al. 7 revealed that a 1% hydroplaning improvement by increasing the groove space will lead to 0.6% decrease in handling, 0.4% increase in rolling resistance, and 2.3% rising in rolling noise.
It is therefore necessary to find a solution to reduce water resistance and meanwhile improve the drainage capacity of tread grooves. Bio-inspired technology can provide a solution to these issues, and biomimetic drag-reduction technology facilitated tremendous achievements in the field of fluid engineering.
The NASA Research Center pointed out that shark skin has riblet groove structure distributed all over the body that reduces water resistance during high-speed swimming. 8 Researchers have explored a number of innovative drag-reducing bio technologies. There have been remarkable achievements in bionic applications in the engineering and mechanical manufacturing fields.9,10 For example, the frictional force using the bionic dimple structure can be reduced by as much as 7%–10% in laboratory experiments. A bionic V-riblet structure has been shown to reduce 1%–2% drag force in airplane flight tests.11,12
Guided by the idea that the drag-reduction effect of the V-riblet is based on the bionic study of shark skin, 13 this article proposes a procedure to design a V-riblet bionic non-smooth surface arrayed on tread circumferential grooves to remove water-flow resistance in the footprint of tread by increasing the flow rate and improve tire hydroplaning performance. First, the FEM model of a tire (205/55R16) was built with Abaqus, and by comparing tread groove deformation between test and simulation, the tire model was validated; second, the hydroplaning model was established using CFD in Fluent software, and the hydroplaning speed was analyzed. The hydroplaning speed was then compared with test data from Okano and Koishi 14 to validate the hydroplaning analysis method. Third, the height and number of the V-riblet non-smooth surface with a 60° angle were set as the design parameters and the results were compared against the smooth surface grooves to obtain the priority V-riblet structure. Finally, set the optimal V-riblet structure for drag reduction on the bottom of the circumferential grooves and make the comparison of hydroplaning speed between the non-smooth surface tread grooves and smooth surface tread grooves. The results show that the V-riblet bionic non-smooth surface tread grooves can increase drainage water velocity and improve tire hydroplaning performance.
Tire FEM model and model verification
One of the main performances of tire tread groove is anti-hydroplaning. The deformation of tread under various loads affects the grooves’ drainage capability. The contact pressure and tread groove deformation under normal load must be first obtained to analyze water flow around tire–ground contact and inside the tread grooves. In this study, the FEM model of a radial tire (205/50R16) was established. The Yeoh model was adopted in the finite element analysis (FEA) of the rubber-like elastomers. The cord-rubber composite, belts, and tire carcass were modeled with rebar layers. Tire vertical deformation was achieved under the load of 4000 N and the inflation pressure of 200 kPa.
The tire static contact pressure is shown in Figure 1, and the tire footprint is obtained from the static loading machine, the MTM-2 tire testing machine, with a pressure-sensing pad, and the detailed test method was provided by Zhou et al. 15 The design width and depth of the circumferential grooves are 8 mm and 9 mm, respectively. The longitudinal grooves under tire static load were chosen as the hydroplaning analysis object after the extraction of the deformed tread shape, which is shown in Figure 2(a). This was one-half of the tire model characterized by the tread’s symmetrical pattern. Using the Boolean operator “subtract,” remove tire model from water computer domain, and we can get the tire hydroplaning computational model, which is shown in Figure 2(b).

Tire footprint under load.

Tire model and hydroplaning: (a) half of tire model and (b) half of hydroplaning model.
The deformation of the tread pattern has a significant influence on groove water drainage. Therefore, it is necessary to acquire the deformation characteristics of the grooves before conducting any hydroplaning analysis. The results of the groove deflection test are presented in Figure 3. The SKR miniature auto-restart displacement sensor was used to monitor deflection at measurement accuracy of ±0.5%. The sensor was installed in a steel plate with a small hole with a diameter five times the size of the sensor probe.

Sample tire and tire static loaded test machine.
The steel plate was placed in the drum testing machine to ensure whether the sensor probe was placed in the middle of the tread groove. A vertical load, moving up and down, was applied in the test. The groove deflection of the crown and shoulder were measured separately, and the deflection of different grooves under different loads was obtained. Tire sinkage with a load of 500 N was chosen as the deflection benchmark to avoid contact position effects between the sensor probe and the groove.
The test was conducted in the following procedure. First, a 15 mm × 15 mm rectangular hole was opened on the steel plate to facilitate displacement of the sensor probe second, two 200 × 200 wood flat with 30 × 30 gap were placed on the tire drum test bench as supporters; third, the steel plate was placed on the two pieces of wood, and the rectangular hole on the steel plate and the gap coincide with one another to facilitate the installation of displacement sensor data lines. The displacement sensor is fixed at one end of a 10 mm × 10 mm cylindrical steel pipe and the other end of the steel pipe is fixed to the tire drum test stand. According to tire coordinate, the displacement sensor is arranged at the symcenter of the longitudinal direction. Once the position is determined, the application of different loads to the tire is achieved by moving the support frame of the tire drum test stand. In order to achieve the crown groove and shoulder groove deformation, the steel plate and the two pieces of wood in the tire axial move at the same time. Tire sinkage with a load of 500 N was chosen as the deflection benchmark to avoid contact position effects between the sensor probe and the groove.
Figure 4 shows the variation of groove deflection with variation of vertical load. However, the deflection of the crown grooves was much larger than that of the shoulder grooves. The tire contact pressure distribution was presented in Figure 1. This should be beneficial for passenger car tires because the shoulder contact pressure is greater than the crown, and the tire will have improved handling performance. Groove deflection tends to be stable at 3500 N. The fact that the simulated results are so close to the measurements demonstrates the validity of the proposed tire simulation model.

Deflection of tread grooves.
Tire hydroplaning analysis and method verification
Hydroplaning computational model
When a tire rolls over on a road surface in wet weather, the water and air will flow from the tire footprint zone. Therefore, the water-film model and air model should be considered in hydroplaning model. The tire contour after static deformation was created and the tire rolling state during the fluid calculation was ignored.
A domain size with a height of 50 mm, with a width of 350 mm, and a length in front of the tire of 300 mm and at the rear of the tire of 600 mm was used, as described in previous research. 16 Figure 2 displays the tire hydroplaning domain, which was meshed using a locally thickened and composite meshes method. The hydroplaning domain was divided into five-sided unstructured tetrahedral mesh hybrid with structure mesh. The mesh inside the grooves and in front of the contact area was refined to ensure there were at least eight discrete units. The entire grid was composed of 1,358,587 cells and 1,272,427 nodes. Tire hydroplaning simulation was carried out using half-tire model.
Boundary conditions
When tire hydroplaning occurs, for an observer sitting in the car, hydroplaning is viewed as a rolling tire at a speed of U (m/s) sliding along a smooth flooded pavement, and this phenomenon is outlined in the fixed reference system. In the fixed reference system, the tire hydroplaning modeling method is more in line with the actual situation, but the road size is large when the calculation efficiency is low, and the model is not easy to converge. Alternatively, for an observer standing in the road, hydroplaning is viewed as a ship with a layer of water and a layer of air, moving at a speed of U (m/s) toward the tire, and this phenomenon is outlined in the move reference system. In a moving coordinate system, the tire hydroplaning modeling is relatively easy; since only a part of the fluid model is required, the convergence of the calculation is better. In addition, this article mainly focuses on analyzing the state of water flow during tire hydroplaning. Thus, the moving reference system is adopted in this article, and the tire is stationary.
Different boundary conditions for the tire hydroplaning simulation were presented in Figure 5. The inlet condition includes water and air two-phase flow, and water occupies the lower part of the inlet which is 10 mm in height (in red color) and the air (in green color) occupies the rest, with both having the same inlet speed of 54, 80, and 90 km/h. The outlet condition formed by Out (in purple color) and Out_top is defined as pressure output with one unit of atmospheric pressure. The friction generated by the Wall (in blue color) and Ground (in blue color) was ignored. Tire surface represents the deformed tire outside profile. The fluid–solid coupling for grooves–water interaction was also neglected. The hydroplaning model takes the longitudinal plane in the center of the tire as the symmetry plane. All the boundary conditions in the model, only the wall and ground boundary are regarded as moving boundary with the same speed of water and pavement surface.

Computational model and boundary conditions for tire hydroplaning.
Turbulence model and analysis details
The volume of fluid (VOF) model is a finite volume interface tracking method appropriate for the solution of two-phase fluid flows. 17 This model is based on the idea of storing in each cell the data about the volume fraction of every fluid in it. The VOF method introduces a new variable, the volume fraction, denoted as α, that measures the amount of the traced fluid (fluid 2) in the volume of the CFD cell. When the cell is empty of the traced fluid, α = 0, which means the cell is full of the other fluid (fluid 1). When the cell is full of the traced fluid, α = 1. When an interface between the two fluids is contained with the cell, 0 < α < 1. The VOF model is desirable for its ability to conserve mass of the traced fluid (and consequently the other fluid).
The SST
The numerical method used in this article is the pressure implicit splitting of operators (PISO) algorithm. In this formulation, the PISO algorithm employs the splitting of operations in the solution of the implicitly discretized momentum and pressure or pressure-correction equations. The PISO algorithm is used primarily to solve the unsteady state flow problem. The physics time step for the unsteady state flow calculation is 0.00002 s, and total physics time is 4050 s. Depending on the monitoring result of dynamic lift, CL acts on the tread, when the CL presents stable value, the computation process is convergence.
Hydroplaning results and method verification
Figure 6 shows water and air interfacial void fraction distribution at different time when speed is 80 km/h. The red part represents water flow. The flow is shown to separate and a wave forms at the front of the tire with water draining from the circumferential grooves, which is consistent with the reality.

Interfacial void fraction distribution at different times: (a) t = 0.005 s, (b) t = 0.01 s, (c) t = 0.015 s, and (d) t = 0.04 s.
Figure 7 presents the comparison of the simulation and the measurement of water flow during hydroplaning. The photograph measured by Dinescu et al. 18 shows that the rolling tire in the water is observed through the glass plate. It can be seen from Figure 7 that there is a standing water location on the front of footprint, and the water is drained by the four longitudinal grooves. Because of the rapid water flow moves along the tire sidewall, the water on the rear of footprint is mainly resulted from the longitudinal grooves which guide the flow. In addition, under the effect of the water-flow inertia, the rear of footprint is filled with water after a certain distance. The simulation of water flow is in good agreement with that of the measurement.
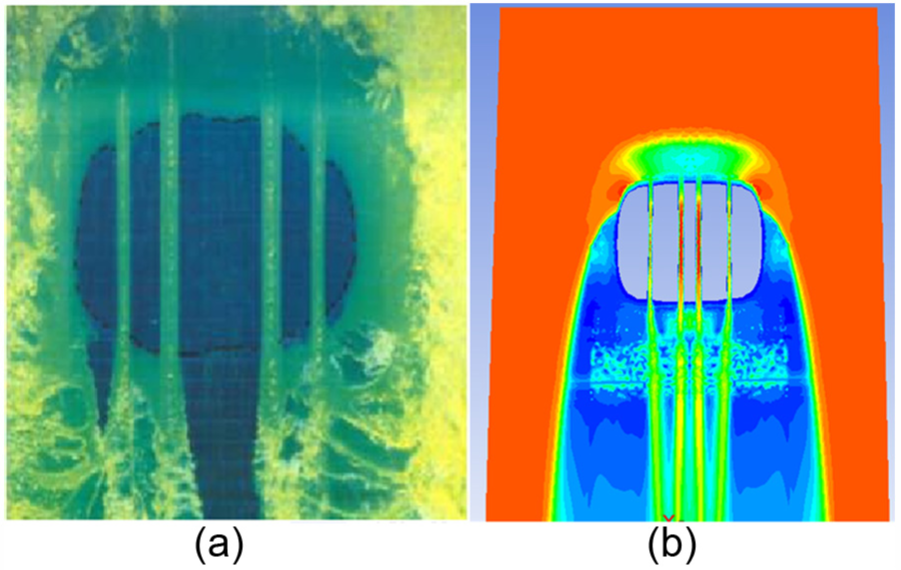
Comparison of simulation and test on water flow: (a) test results and (b) CFD simulation.
The dynamic lift CL is the vertical force component derived from the water dynamic pressure acts on the tire tread. As shown in Figure 8, CL was zero before the water contacted the tire tread; at this point, CL increased sharply, reaching a stable state as the water continued to flow. The faster the speed of the water flows, the greater the dynamic lift CL and the more likely hydroplaning occur. Based on the conclusion provided by the NASA equation, the hydroplaning occurred once the lift CL was 2012 N at 80 km/h, and it is nearly equals to half of the tire load and tire hydroplaning occurred.
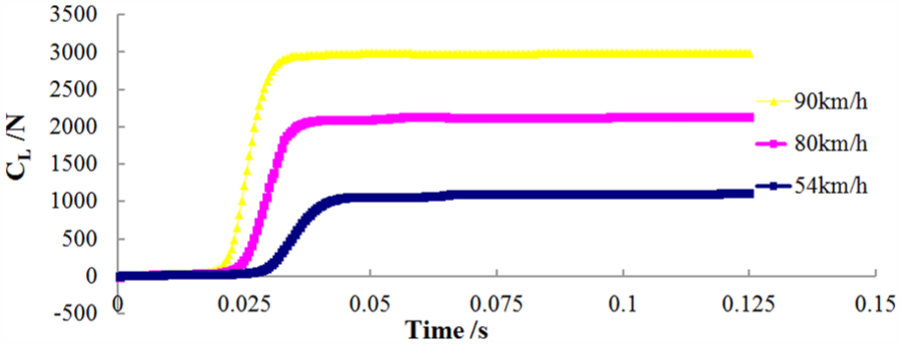
The dynamic lift CL in different water speed pressure.
In 2001, Okano and Koishi 14 conducted a similar hydroplaning test depicted in Figure 9. In their measurement, several tires with different circumferential grooves were placed on the same car and driven onto a test site at certain acceleration.

Relationships among the slip ratio, speed, and tread pattern obtained by test.
High-speed photography was used to record the water-flow process. The middle of these test tires in Figure 9 was the same as the simulation tire used in this article. According to the experimental results, hydroplaning occurred when the vehicle reached 82 km/h. The simulation results agreed with the experimental results, which proves that the CFD method used in the simulation can effectively predict hydroplaning speed.
Analysis of water drag for tire grooves with V-riblet bionic non-smooth surfaces
When a tire rolls on wet pavement, the tire-pavement contact area is filled with water and hydroplaning occurs when the dynamic pressure acting on the tread takes the tire off the pavement. The main function of the tread pattern is to drainage water and thereby decreasing dynamic pressure. In other words, the larger the water drainage speed and capacity of the tread pattern, the less possibility of hydroplaning will occur. The frictional resistance and pressure drag created by the unstable water-flow are related to the boundary layer and tread thickness. The drag-reducing principle of a bionic non-smooth surface is to control boundary layer structure and reduce turbulent bursting intensity. Therefore, the V-riblet non-smooth element size can be designed according to boundary layer thickness. The computational details are the same as those in the hydroplaning model described above, with the exception that the bionic V-riblet surface was arranged on the tire pattern groove surface, which is shown in Figure 10.
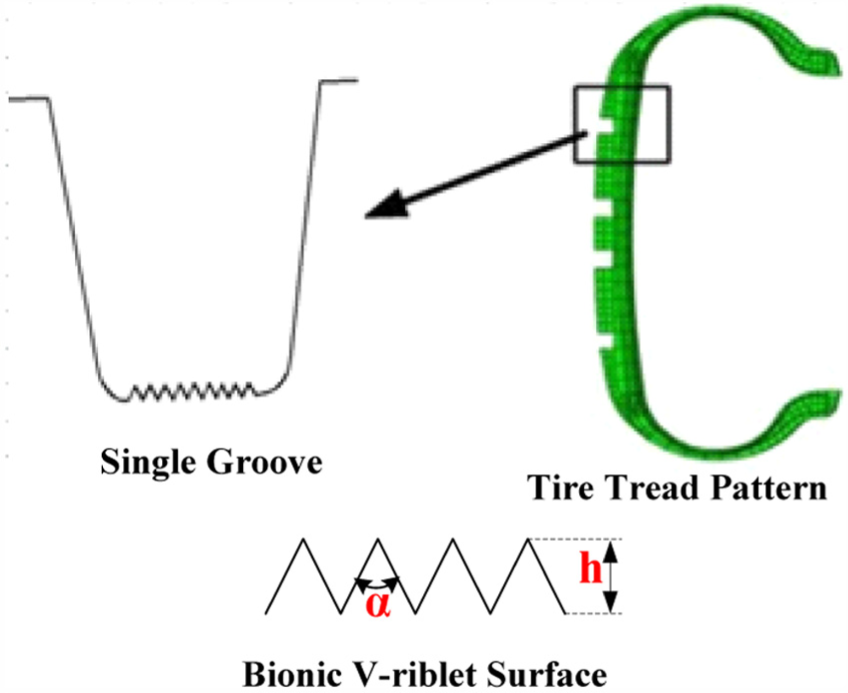
V-riblet surface arranged in grooves.
V-riblet bionic non-smooth surface
The equation for estimating boundary layer thickness is

where x is the flow displacement and Rex is the Reynolds numbers corresponding to x displacement. Per structural parameters, the tread pattern circumferential groove and tire travel speed were fixed between 30 and 120 km/h; and the boundary layer thickness was estimated in the range of 0.6–1.2 mm. To make sure that the non-smooth structure affects the internal structure of the boundary layer, it should not be too close to the thickness of the boundary layer. 19
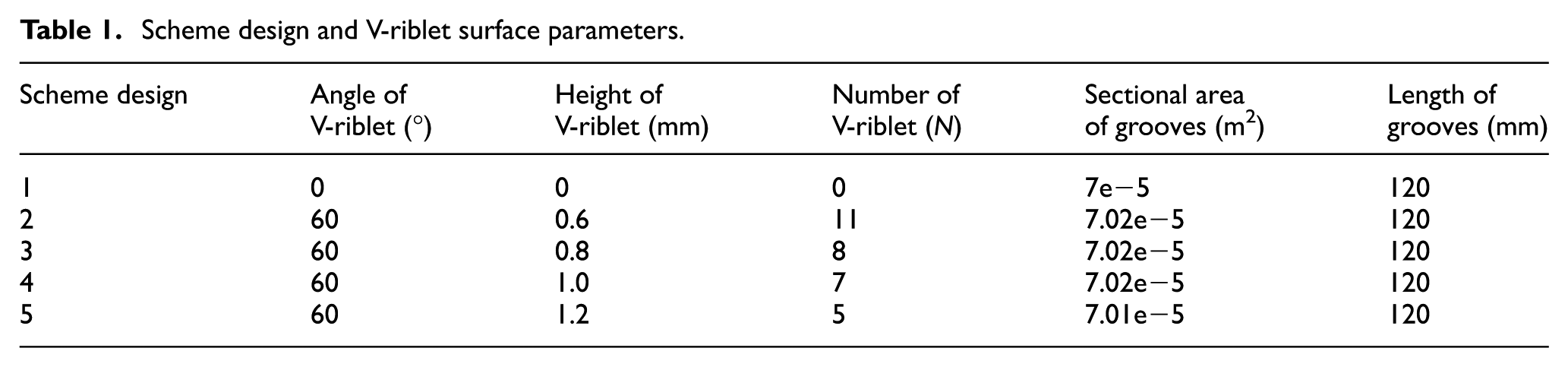
A groove length of 120 mm on the V-riblet non-smooth surface with a 60°angle was chosen to determine the influence of this surface on a tire groove’s water drainage and resistance. Because groove volume affects water resistance, the sectional groove area was kept at 7e−5 m2 with a 2.5% range of error. Table 1 presents the scheme design and factors in further detail.
Scheme design and V-riblet surface parameters.
Mesh of the computational domain
The model size of the longitudinal grooves was 8 mm on the width direction, 9 mm on the depth direction, and 120 mm on the flow direction. The hexahedral and pentahedron grids were combined in a pre-processor software to refine the mesh close to the surface (Figure 11).

Single-groove mesh and partial enlarge.
Considering fluid viscosity, and in order to make the bionic non-smooth surface disturb the wall viscous sub-layer flow. The dimensionless number of the first grid near the wall is controlled at

where
Calculating boundary conditions
This article focuses on the flowing inlet and outlet boundary as boundary conditions for the computational domain of the V-riblet non-smooth surface.
Inlet conditions: The inlet speed was used to study drag reduction on the V-riblet surface under different flow speeds. Three initial inlet speeds were considered: 22, 25, and30 m/s. The turbulence parameters were calculated according to the fluid theories.
Outlet conditions: Atmospheric pressure was used at the outlet.
Wall boundary conditions: Static and no-slip surfaces were applied to the walls of grooves.
Drainage ability and reduced resistance of V-riblet surface longitudinal groove
Fluid flowing into the longitudinal groove was treated as pipe turbulence fluid. The drag coefficient of this pipe was obtained from empirical or semi-empirical formulas. 20
The empirical formula for the drag coefficient of smooth pipe f is

When the fluid reaches the steady state in the tread groove, the numerical testing resistance coefficient can be calculated as follows

where
Table 2 shows the longitudinal groove drag under different flow speeds. The drag coefficient in the longitudinal groove simulation is very close to the drag coefficient calculated using the empirical formula, indicating that turbulence parameters selected by simulation and boundary conditions are reasonable.
The tire free rolling boundary conditions.

Utilizing the Bernoulli equation of steady flow, the following is established

where

where

The outlet flow under different schemes in multiple velocities is shown in Table 3. The V-riblet bionic non-smooth surface arranged on the bottom of the grooves led to the highest levels of water displacement, but drainage capacity was inversely proportional to the height of V-riblet surface.
Outlet flow under different schemes in multiple velocities.

Assuming the evaluation index of the drag-reduction effect, the drag-reduction rate becomes

where
Table 4 presents the drag reduction under different water velocities. However, drag-reduction rates decrease as flow velocity increases. Scheme 2 shows three different fluid speeds and maximum outlet flow when it reaches its maximum drag-reduction rate.
Drag reduction under different water velocities.

Analysis of drag-reduction mechanism in V-riblet surface
The flow field characteristics of Scheme 2 were chosen for exhibiting the best drag-reducing capabilities to explore the drag-reduction mechanism of the V-riblet surface. A speed of 22 m/s was used with the same smooth wall-flow field characteristics. A flow cross section was chosen 10 mm from the entrance to avoid the impact of the entrance and exit effect. The cross section is shown in Figure 12.

Characteristic-plane position.
In general, the second vortex group theory and prominent high theory are internationally recognized as accurately representing the bionic theory of resistance and noise reduction. 21 Flow speed under different drag-reduction effects and increased resistance leads to a decrease in groove surface shear stress within the boundary layer above the groove. This is caused by the effects of the groove tip structure on the boundary layer flow field, which results in a turbulent coherent structure. In this section, analysis of the drag-reduction mechanism in the V-riblet surface is carried out according to the secondary vortex and boundary layer thickness.
Existence of the secondary vortex
Figure 13 shows the contour map of span-wise speed

Vx-speed contour line in the extensional direction: (a) V-riblet non-smooth surface and (b) smooth surface.
Figure 14 shows the contour map of span-wise speed

Vy-speed contour line in the longitudinal direction: (a) V-riblet non-smooth surface and (b) smooth surface.
Speed field analysis
Figure 15 shows a comparison of the speed in the near-wall region of a feature plane Z = 10 mm between the V-riblet model and smooth model. The speed fields within the plane for them have a considerable difference. Mainstream speed was reached within the boundary layer by the speed of the smooth surface in a shorter distance, resulting in a thinner boundary layer and a more intense variation in speed compared to the V-riblet surface. Using the equation

Comparison of speed distribution in the feature plane Z = 10 mm: (a) V-riblet smooth surface and (b) smooth surface.
Analysis of V-riblet bionic non-smooth surface tire hydroplaning
The optimal V-riblet surface for drag reduction was set on the bottom of the circumferential grooves. According to the tire hydroplaning analysis method provided in chart 3, a comparison was then made between the original smooth tire and the V-riblet bionic non-smooth surface tire. Figure 16 shows the half-tire hydroplaning model arranged with a V-riblet non-smooth structure.
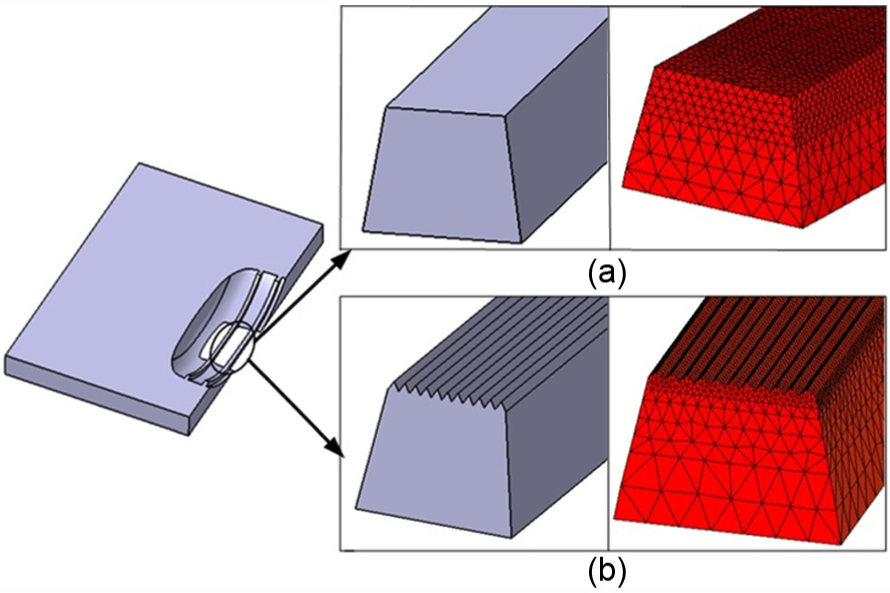
Mesh of tire hydroplaning model: (a) original tire hydroplaning model and (b) V-riblet tire hydroplaning model.
Figure 17 shows the dynamic pressure acting on the tire of the two models with water speeds of 22 and 25 m/s, respectively. When water speed was 22 m/s, the dynamic pressure of the original smooth tire was 202.5 kPa, while that of the V-riblet surface tire was 196.9 kPa. When water speed was 25 m/s, the dynamic pressure of the two models was 264.5 and 255.6 kPa, respectively.
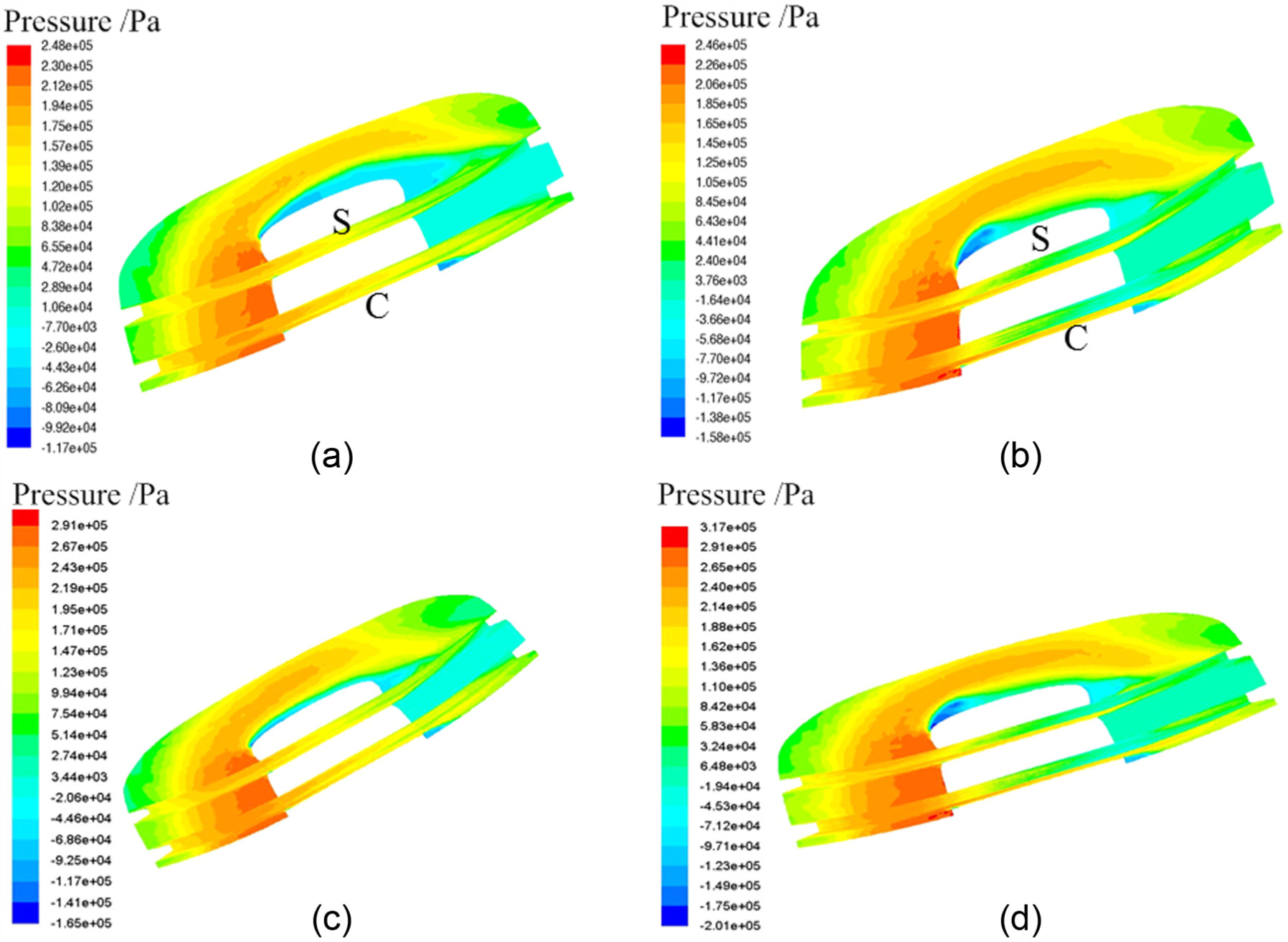
Comparison of dynamic pressure between the original smooth tire and V-riblet surface tire: (a) 22 m/s, smooth surface; (b) 22 m/s, V-riblet surface; (c) 25 m/s, smooth surface; and (d) 25 m/s, V-riblet surface.
According to the equation of dynamic pressure
To investigate the effect of V-riblet bionic non-smooth surface designed in grooves on hydroplaning speed, the water speed within the tire grooves was measured and compared between one tread with smooth grooves and one with non-smooth grooves. Higher flow speed suggests better drainage ability and superior hydroplaning performance. Two measurement lines were selected for both treads: the centroid of the longitudinal grooves (4 mm above the ground) at the (1) tread center and (2) tread shoulder, indicated by C and S, respectively, in Figure 17. Figure 18 demonstrates the results at the water-flow speed of 22 and 25 m/s. It is found that at the same measurement line, the water speed for the V-riblet non-smooth grooves is considerably higher than that of the smooth grooves, which means the V-riblet bionic non-smooth surface tire has better hydroplaning performance.

Comparison of water speed between the smooth surface grooves and the V-riblet surface grooves at (a) 22 m/s and (b) 25 m/s.
In addition, for the same tread, the flow speed at the center groove is larger than that at the shoulder groove. This is mainly because the water pressure is higher at the center, pushing the water from the center to the shoulder. However, due to the inertia effect, the majority of water goes further away from the shoulder instead of flow into the shoulder groove.
Conclusion
Tire hydroplaning simulation was conducted using the CFD method, and water-flow field characteristics and dynamic pressure acting on the tire can be predicted by the CFD method. From the comparison of hydroplaning speed between the simulation results with the experimental results, it can be concluded that CFD method can effectively predict hydroplaning speed.
The V-riblet bionic non-smooth surface can decrease the speed gradient perpendicular to the direction of the flow along with water drag at the surface. The bottom of the V-riblet surface encouraged low-speed fluid, which acted as a lubricant in external fluid movement resulting in drag reduction. This made the external high-speed fluid to pass from the internal low-speed fluid zones, which reduces energy loss directly flowing from the groove wall, and improves water-flow speed and grooves’ drainage volume, thus reducing the tread hydrodynamic tire pressure when driving on a water-film.
The arrangement of patterned grooves reduces water resistance flowing through the grooves and improves the drainage capacity of grooves. Unlike traditional methods of modifying structure parameters to increase tread grooves void, the design of tread grooves with bionic non-smooth surface can improve hydroplaning performance without increasing tread grooves void volume, which also reduces the tread air-pumping noise caused by grooves large deformation.
Footnotes
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant Nos 51605198 and 51675240), Jiangsu Province Funds for Young Scientists (Grant No. KB2016042722), Six talent peaks project in Jiangsu Province (Project No. JXQC-011) and Road Vehicles in Jiangsu Province Key Laboratory of New Technology Application (BM20082061505).