
Abstract
Syncretic oil pumping–gas compression stations exist because oil and gas pipelines often run parallel to one another. Risk assessment and safety management present challenges in these stations because they house large numbers of devices that perform complicated operations. Quantitative risk assessment is effective in predicting probabilities and consequences of accidents; however, this method does not clearly address accident causation and other important factors that can lead to major accidents. To supplement quantitative risk assessment, this article proposes a safety barrier–based accident model for oil and gas stations based on the Swiss cheese model. An example is employed to illustrate the application of the combined method in safety management. Risk levels for different subsystems are calculated in quantitative risk assessment, and safety barriers with bad performance in high-risk subsystems are identified based on the proposed accident model. These results indicate that the combined method can be efficient for a complicated system since it helps the operators focus on the cells with high risk instead of the whole system.
Introduction
Oil and gas (O&G) are the main sources of energy in use around the world. Most O&G is transported from one location to another through pipelines. 1 As power sources for O&G pipelines, oil pumping stations and gas compression stations play a vital role in ensuring the smooth and reliable operation of O&G distribution systems. However, the flammable and explosive behavior of O&G, along with their polluting properties and adverse effects on human health, creates risks for facility staff, the general public, industrial assets, and the environment. Because of these dangers, comprehensive and systematic risk management and safety planning are important to the O&G industry. Risk assessment and management is more difficult in stations than in pipelines because stations operate larger numbers of devices that perform more complicated processes.
An exhaustive search of the literature in the public domain confirms that O&G companies, governmental agencies, consumers, and other stakeholders who are concerned about risk management concentrate primarily on the integrity of pipelines2–6 and the effects of fires caused by O&G releases.7–10 In contrast, risk assessment in stations remains in the exploratory stage, and scant information exists about risk and accident modeling in oil pumping stations, gas compression stations, and especially syncretic oil pumping–gas compression stations.
Recently, researchers in many countries have begun to address risk management based on quantitative risk assessment (QRA). 11 QRA is a tool capable of coping with complexity, and it defines a spectrum of risks based on defined scenarios. 12 QRA began in the Rasmussen’s WASH-1400 study published in 1975 for the Nuclear Regulatory Commission, 13 which introduced the method of probabilistic risk assessment (PRA), equivalent to QRA. In 1981, the Norwegian Petroleum Directorate (NPD) issued the first formal requirement for offshore QRA according to its “Guidelines for Safety Evaluation of Platform Conceptual Design.” 14 Many QRA developments have occurred during the subsequent three decades, and QRA is now applied worldwide to provide quantitative information on the risks associated with accidents in chemical and process plants.15–17 However, the definition of risk used in QRA is quite narrow. 18 QRA describes risk in terms of probabilities and possible consequences, which limits notions of causality and inadequately expresses uncertainty. Skogdalen and Vinnem 19 suggested using the available information from a precursor incident as an input for the QRA methodology in order to identify all accident scenarios as well as factors that might produce surprising outcomes. They called this method Quantitative Risk Analysis Precursor Incident Investigation (QRA PII).
This article builds on the Swiss cheese model to construct a conceptual accident model that allows for precursor incident investigation in O&G distribution stations. The proposed model is then combined with QRA to identify hazards, probabilities, safety barriers, possible consequences, and other effects.
This article is organized as follows. Section “Swiss cheese model and its variations” provides a general overview of the Swiss cheese model and its variations. Section “Safety barriers and the bow-tie model” introduces the concept of safety barriers and their classifications, along with the conceptual safety barrier–based model. This is followed by the combination of the proposed model and QRA in section “Combing safety barrier–based accident modeling and QRA.” Section “Case study” illustrates the application of the combined method in a syncretic oil pumping–gas compression station. Finally, section “Conclusion” presents conclusions.
Swiss cheese model and its variations
Accident investigation methods are usually based on different causation models that help to establish a shared understanding of how and why accidents happen. 20 Many accident models exist for other O&G facilities, and these can provide references for accident modeling in oil pumping stations and gas compression stations. The available accident models differ depending on the individuals or teams performing the analysis as well as the objects analyzed. 21 In general, however, accident models can be classified into three major categories.22–24 The first category comprises simple linear system models, also known as sequential models, which adopt a sequential notion of causality and regard an accident as the result of a chain of discrete events that occur in a specific order. These models include domino theory, 25 sequential timed events plotting (STEP), 26 and the loss causation model. 27 The second category is made up of complex linear system models or epidemiological models. These models present an accident as the outcome of a combination of factors, analogous to the spread of a disease; examples include the Swiss cheese model (SCM) 28 and Bayesian belief networks (BBN). 29 The third category, systematic models, works on a systems level and describes an accident as the consequence of a coincidence of events rather than a deterministic succession of events. Examples of this type of model include the systems-theoretic accident model and process (STAMP) 30 and the functional resonance analysis method (FRAM).
Figure 1 illustrates the conceptual framework for SCM, in which slices of Swiss cheese represent successive safety barriers, and holes in the slices represent latent or precursive failures. 31 Intuitively, safety is maximized when there are more barriers, smaller holes, and fewer holes. Accidents will not occur until all of the slices fail, which conveys the idea that an accident involves the convergence of events and conditions.
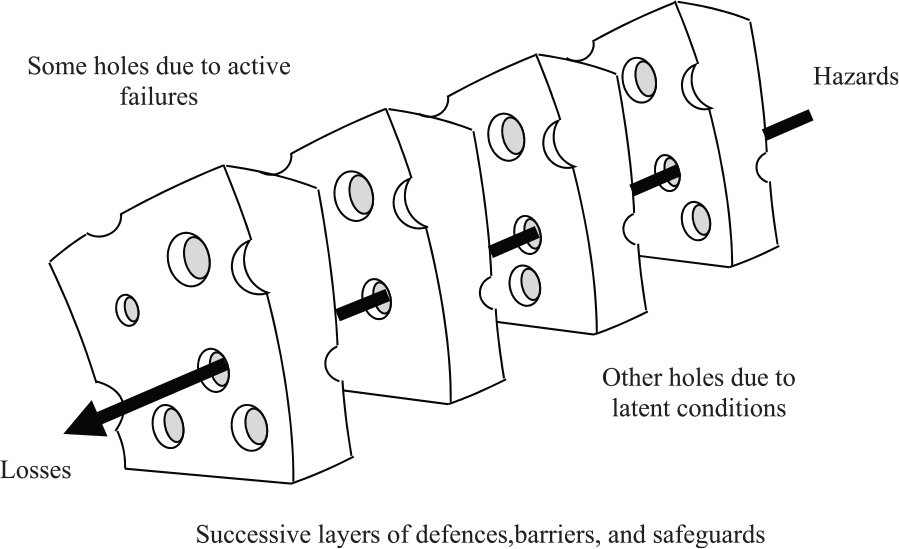
Swiss cheese model adapted from Reason et al. 30
Based on Reason’s model, the universities of Leiden and Manchester developed the TRIPOD method for Shell’s Exploration and Production function.32,33 This model pays special attention to failures at both the individual and the organizational levels, and it introduces the idea of latent failures as potential causes of future accidents. In 2007, Licu et al. 34 used the principles of SCM to propose the systematic occurrence analysis methodology (SOAM), which aims to broaden the focus of an investigation beyond human involvement issues by investigating latent conditions rooted in the organization. Kujath et al. proposed a special version of SCM that uses the safety barrier concept to prioritize the prevention of process accidents in an offshore environment. Later, Rathnayaka et al. 35 further developed the work of Kujath et al. by establishing a model that represents logical relationships among the barriers (see Figure 2). Rathnayaka also proposed the system hazard identification, prediction, and prevention (SHIPP) methodology, which describes the steps of process safety assessment and provides a guide to possible improvements at every step of the accident process.

The process accident model adapted from Rathnayaka et al. 35
This study proposes a model that identifies vulnerabilities in a station’s safety barrier system, allowing operators to prevent an oil or gas leakage as well as to control and mitigate its consequences. This process is analogous to SCM. In order to apply SCM to a specific accident, all safety barriers and their potential failures must be identified at the very beginning of the process. The next section introduces the knowledge relevant to performing this task.
Safety barriers and the bow-tie model
As industry has developed, various safety barriers with different functions have been implemented to prevent accidents, which are mainly caused by human-induced hazards. 36 The concept of safety barriers is often related to the energy model (see Figure 3), which was first proposed by Gibson 37 and further developed by Haddon. 38
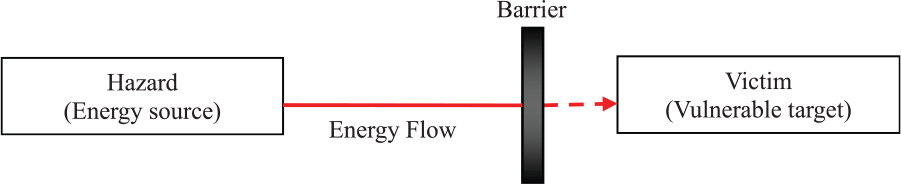
The energy model (based on Haddon 38 ).
However, no universal definition exists for the safety barrier concept, and various industries, sectors, and countries employ similar terms like defense-in-depth,
39
layer of protection,40,41 and safety function.42–46 According to Hollnagel,
47
in daily language use, the term barrier often refers to a barrier function, which Sklet defined as follows based on a literature survey:
A barrier function is a function planned to prevent, control, or mitigate undesired events or accidents.
Correspondingly, Sklet defined safety barriers as follows:
Safety barriers are physical and/or non-physical means planned to prevent, control, or mitigate undesired events or accidents.
According to this definition, prevention barriers, detection and control barriers, and mitigation barriers should all be considered as possible components of a safety barrier system. In addition to these factors, this work also considers intrinsic safety barriers. The conceptual safety barrier–based accident model consists of four barrier subsystems, illustrated in Figure 4. Intrinsic safety barriers are implemented to counteract intrinsic defects and external hazards and reduce the likelihood of initiating events occurring. Prevention barriers are implemented to prevent threats from leading to a major event, like a gas or oil leak. Detection and control barriers limit the extent or duration of an event in order to prevent escalations such as a fire or explosion, while mitigation barriers reduce the severity of consequences.

Safety barrier–based accident model.
In order to provide an easily understood visualization of the relationships among hazards, threats, controls, and consequences, a safety barrier diagram can be specially designed to resemble a bow-tie. 48 The bow-tie model is an adapted combination of fault tree and event tree diagrams linked to a critical event that represents a hazard.49–51 The basic events and logic relating to safety barriers in bow-tie diagrams are encapsulated in a single item, reducing the number of symbols in the graph and yielding diagrams that are much easier for non-experts to understand. 52 In a bow-tie diagram, the fault tree on the left helps to identify the prevention barriers that reduce the likelihood of a critical event occurring, while the event tree on the right allows for the identification of detection and control barriers that prevent the escalation of such an event, as well as the mitigation barriers that limit the consequences. Figure 5 shows a simplified bow-tie diagram.

Basic bow-tie model.
Combing safety barrier–based accident modeling and QRA
O&G stations house numerous installations with very complex operations, creating myriad opportunities for something to go wrong. Unfortunately, developing a comprehensive overview of all possible scenarios and identifying root accident causes represent QRA’s Achilles heel. The bow-tie model includes a painstaking analysis of safety barriers, which is helpful in scenario development and causality identification. Therefore, the bow-tie model can supplement QRA in the safety management of a syncretic oil pumping–gas compression station, as illustrated in Figure 6.
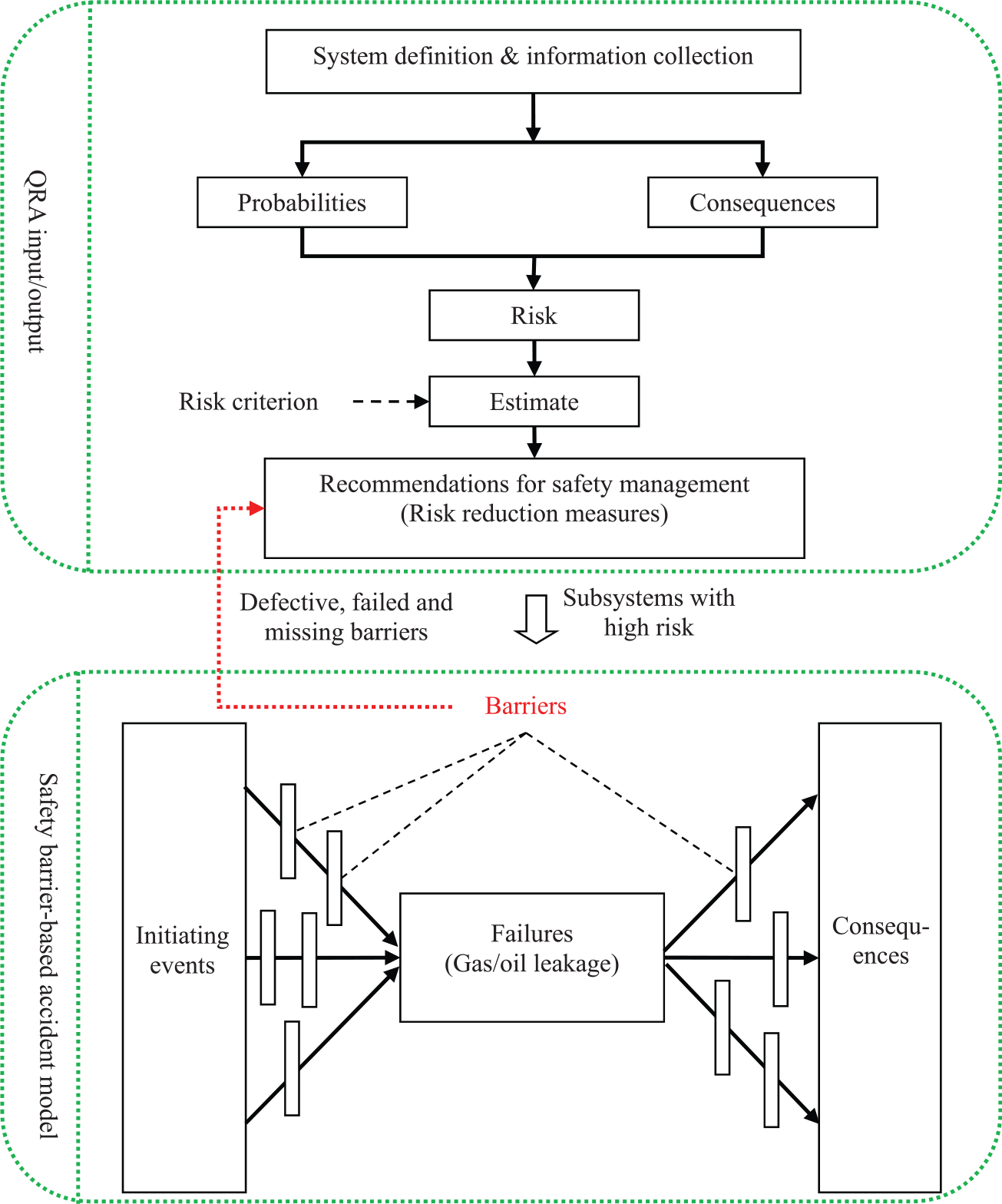
The combined structure of safety barrier–based accident modeling and QRA.
The first step in implementing this approach is to define a system and its boundaries. In general, a syncretic oil pumping–gas compression station is a complex system consisting of different subsystems. The initiating events and safety barriers vary across different subsystems, making it more effective to conduct QRA and analyze safety barriers on a subsystem basis. Once the subsystem is defined, a potential major incident, usually a hazard release, is determined. The next step is using QRA to calculate the probabilities and severities of the major incidents and their potential consequences. Table 1 illustrates the consequence categories used in this study, grouped by severity (China National Petroleum Corporation (CNPC)). The aggregate consequences of an O&G system failure include individual injury, property loss, production interruption, and environmental pollution. Consequence severity varies along a five-level scale: very low (VL), low (L), medium (M), high (H), and very high (VH).
Consequence categories (CNPC).
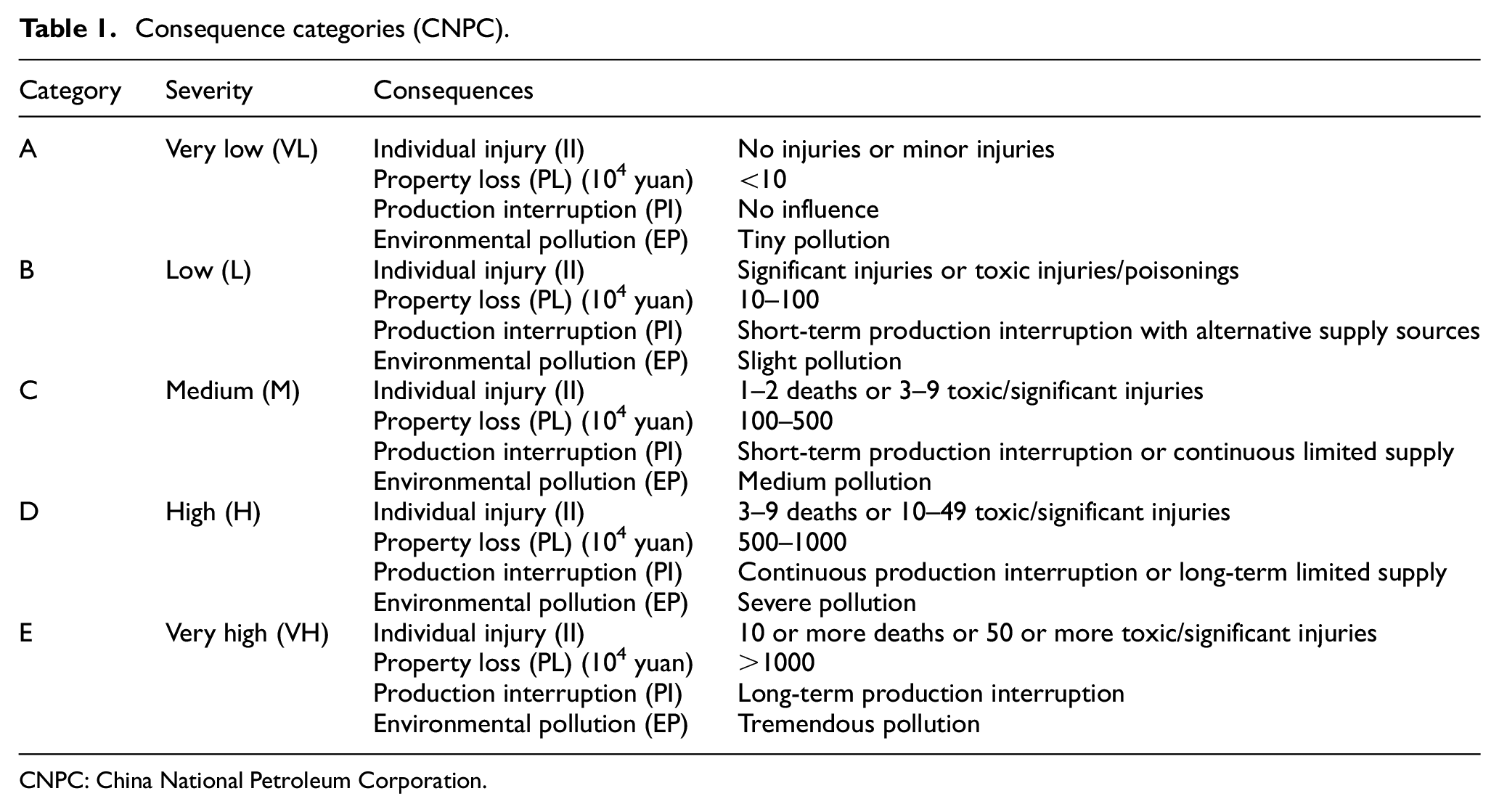
CNPC: China National Petroleum Corporation.
Next, a matrix from CNPC can be applied (see Figure 7) to estimate risk, which is the product of a probability and the severity of its consequences. The probability value is classified into five levels: (1) <1/10,000, (2) 1/10,000–1/1000, (3) 1/1000–1/100, (4) 1/100–1/10, and (5) >1/10. The risk value is divided into three levels linked to the three colors in the risk matrix; specifically, red indicates the highest risk, yellow represents a medium level of risk, and green denotes the lowest risk.
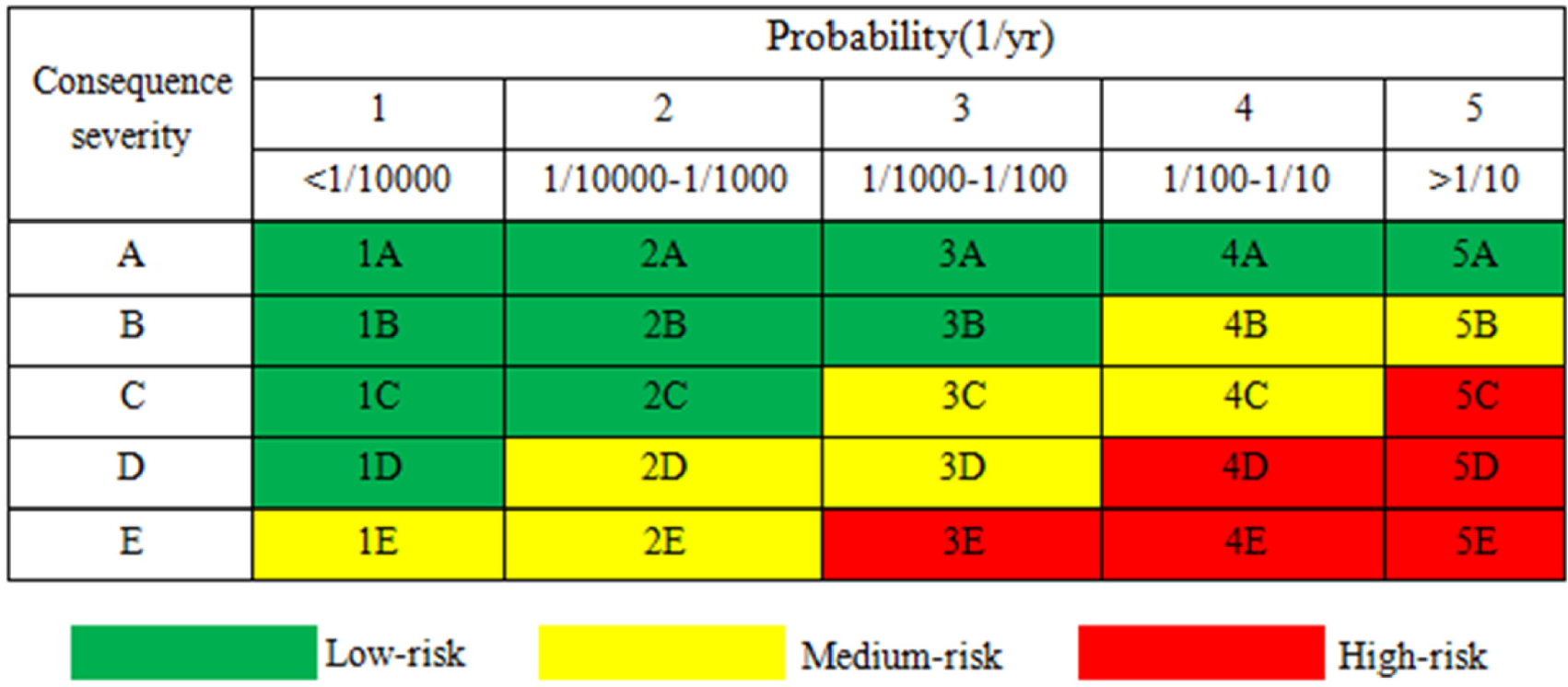
Risk matrix adapted from CNPC.
Based on the QRA results, safety barrier–based accident modeling of high-risk subsystems can be performed using bow-tie diagrams. This process can identify defective, failed, and missing barriers, as well as produce recommendations for safety management and risk reduction.
Case study
This section describes the safety management of a syncretic oil pumping–gas compression station using the proposed safety barrier–based accident model combined with QRA. This station includes both an oil system and a gas system. As Figure 8 shows, four subsystems exist in the station: the gas system (orange area), the oil system (yellow area), the common facilities (purple area), and the administrative department (green area). The gas system includes four function zones, R1 through R4, and the oil system includes five function zones, R5 through R9. The nine function zones are labeled as follows:
R1: gas in/out area;
R2: gas process area;
R3: air cooler area;
R4: compressor area;
R5: oil in/out area;
R6: oil process area;
R7: group valve before oil tank;
R8: oil tank area;
R9: oil pump house.

Functional zoning map of a syncretic oil pumping–gas compression station.
The probabilities of oil or gas release in every function zone can be calculated using LEAK software, with the effects of different scenarios analyzed using PHAST software. Both LEAK and PHAST were developed by Det Norske Veritas (DNV). Table 2 shows the QRA results.
QRA results.

QRA: quantitative risk assessment; II: individual injury; PL: property loss; PI: production interruption; EP: environmental pollution.
The risk levels of zones R2 and R9 are located in the red blocks of the risk matrix, indicating unacceptably high risk. Therefore, safety barrier–based accident modeling must be performed for R2 (gas process area) and R9 (oil pump house). Figures 9 and 10 show corresponding bow-tie diagrams for these two areas. The bow-tie diagrams describe barrier performance using different colors. Green represents more effective barriers, blue barriers are average or neutral, orange barriers are less effective, and white barriers are missing or absent.

Bow-tie diagram of gas tank leakage in R2.
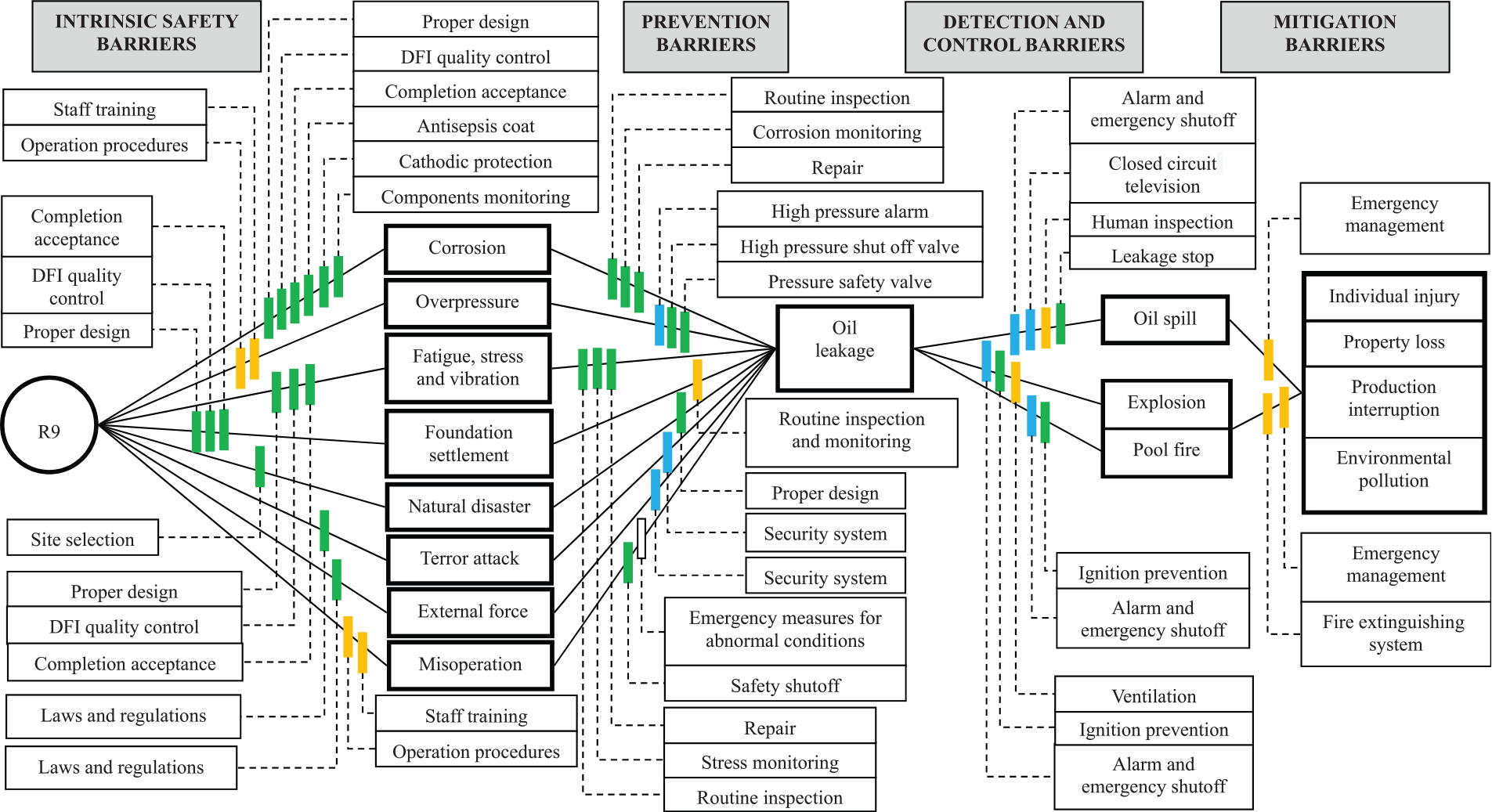
Bow-tie diagram of oil leakage in R9.
The bow-tie diagrams for R2 and R9 identify some barriers with neutral or less-effective performances, which may present pathways for accidents. Therefore, actions are recommended to improve the performance of these barriers and reduce the risks (see Table 3).
Recommendations based on bow-tie analyses.

Conclusion
Limited sources exist that provide useful information about accident models for stations in O&G distribution systems. This article has proposed a conceptual safety barrier–based accident model that can identify both potential accident scenarios and barriers that exist in different phases of accident evolution, including intrinsic safety barriers, prevention barriers, detection and control barriers, and mitigation barriers. Intrinsic safety depends on the system’s design and construction, and it is the primary requirement to guarantee system reliability. Secondary barriers are necessary to prevent initial factors or events from leading to an oil or gas leakage. Once a leak occurs, the primary safety concern is to reduce the possibility of accident escalation; corresponding measures should be taken to mitigate the effects of the leakage, especially when there is a fire or an explosion. In order to make the accident model concrete and practical, the proposed method employs bow-tie diagrams to perform safety barrier analyses.
The safety barrier–based accident modeling is combined with QRA to compensate for some of QRA’s weaknesses. The case study confirms that the combined method can be effective in the safety management of a syncretic oil pumping–gas compression station. QRA provides quantitative risk and singles out high-risk subsystems that require more attention, while safety barrier analysis identifies less-effective, neutral, or missing barriers and discusses potential improvements. Thus, the safety management workload would be reduced since the safety barrier analysis is carried out only for the high-risk subsystems instead of the whole system. In addition, the system security is also guaranteed because the managers can make improvements for barriers with bad performance according to the safety barrier analyses. The combination of quantitative analysis and qualitative analysis based on an accident model is an important innovation in the safety management of a complex system. Further theoretical and applied research should be conducted on this topic.
Footnotes
Academic Editor: Jun Ren
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key R&D Program of China (2016YFC0802100).