
Abstract
With the increasingly precise and sensitive nature of space payload, the impact and vibration of the on-orbit unlocking process have become more serious. There is a particular need to develop a device to replace the traditional pyrotechnic device for the reliable connection and low-shock separation for space payloads. In this article, according to the demand of low impact and rapid release of space heavy load, an unlocked trigger device based on shape memory alloy fiber was proposed. Based on the material characteristics of shape memory alloy, the theoretical modeling and analysis of the unlocking trigger device were performed. Combined with the constitutive equation of shape memory alloy and typical boundary conditions, the stress–strain–temperature relationship of shape memory alloy fiber under one-dimensional state was deduced and obtained. A comprehensive performance test of the unlocking trigger device was designed and produced based on the requirement of the space application environment, and the response characteristics and actuation characteristics of shape memory alloy actuator were obtained. Based on the design requirements, a development and experimental study of the prototype shape memory alloy unlock trigger device was conducted. The results demonstrate that the unlocking device based on a shape memory alloy fiber designed in this article has fast unlocking response characteristics and good environmental adaptability, which can provide technical support for space applications of large space load and low-impact locking mechanisms.
Keywords
Introduction
At present, most of the locking–release devices used in spacecraft are pyrotechnic devices, represented by an explosive bolt and a cutter. The pyrotechnic device has obvious unlocking impact in the action process and can only be used one time. 1 In addition, the pyrotechnic device presents a safety hazard; it has many shortcomings such as being explosive, causing pollution, and having inconvenient storage and transportation properties. With the development of new and effective load technology, and as sensitive instruments and optical equipment of high precision are more commonly applied in the space, the application of traditional pyrotechnic devices has great limitations.
To overcome the limitations of the traditional pyrotechnic devices, new joining connection and separation technology based on smart materials has been developed, 2 and the locking mechanism of many new joining mechanism has been developed, including shape memory alloy (SMA) release devices,3–6 paraffin drive devices,7–10 thermal cutting devices,11,12 and other devices.2,13 All these devices have been tested in space flight and successfully applied to multiple models. In these smart materials, the memory alloy has the highest working density 14 (it is 100 times the working density of the motor), and it can lift weight 100 times heavier than itself. 15 The SMA can output great force and displacement in the restoring process. Therefore, this alloy is often used in the design and development of locking mechanisms. The Spanish company, SENER, developed a kind of release device with a large bearing capacity based on SMA fiber. The bearing capacity is 20 kN, the separation impact is small (impulse is less than 1 N), and it can be reused for more than 50 times. 16 The United States air force laboratory and the research company Starsys developed a low-impact release device QWKNUT based on SMA. 17 The load capacity of the device can reach 10 kN, the separation impact is less than 150 g, and the release time is 35 ms. In addition, the United States Naval Research Laboratory funded Starsys to develop a fast responding–type low-impact separation nut device, 18 which has been verified by the United States “Atlas” launch vehicle. 19 Korea University of Aeronautics and Astronautics developed a separation mechanism using SMA wire as its driving device. 20 Its maximum bearing capacity is somewhat small (only 500 N), the impact is not bigger than 30 g, the power supply is 2–2.75 A, and the average separation time is not greater than 0.8 s. To improve the bearing capacity, the Korea Institute of Science and Technology has designed a large load-bearing locking mechanism based on the actuator principle of the mechanism. 21 The maximum load of the device can reach 15 kN, the unlocking impact is 350 g, and the required power supply is only 10.4 W. X Yan and K Zhang 22 designed a separation device (BAUU2 device) using SMA fiber as the driver, the bearing capacity of the device is greater than 1 kN, the separation time is approximately 0.1 s, and it has good synchronicity, small size and simple reset. J Jiang 23 and Y Wang 24 of Harbin Institute of Technology designed a release device using SMA fiber as the trigger source, and the maximum bearing capacity of the device can reach 25 kN, the unlocking time of the device is not greater than 1.5 s, the unlocking impact is less than 110 g N, and it can be reused more than 30 times.
Based on the analysis of locking mechanisms using SMA smart materials, the high bearing capacity and rapid separation of the locking mechanism can be realized using SMA fiber, while having the characteristics of low impact, low mass, and reliability.25–28 Therefore, to meet the needs of a large bearing capacity and low-impact locking mechanism for future space payload, this article focuses on a trigger device based on SMA fiber for a locking mechanism. The first part introduces the working principle of the locking mechanism and its trigger device. In the second part, the modeling analysis of SMA wires is performed, and the response characteristics under different boundary conditions are obtained.29–31 The third part focuses on the corresponding test of SMA wires in trigger devices, and the test data are supported by the trigger device and locking mechanism. The fourth part develops the prototype and verifies the function and performance of the trigger device.
Structural design of the unlocking trigger equipment
Working principle of lock–release mechanism
The function of the locking–release mechanism used for the separation of the Star Arrow connection is to realize the reliable locking of the payload and the platform in the launching process and the reliable releasing after entering the orbit. The design requirements of the locking mechanism are large bearing capacity, low impact, and rapid response, but the impact load of the pyrotechnics device is obvious, the response time of the fuse or thermal cutting is long, and the micro-displacement of the piezoelectric drive is not suitable for this design; combined with the practical application of typical locking mechanism, SMA fiber is to be used to design the locking–release device. Under the condition of low impact and rapid response, it is difficult to reach kN scale bearing capacity with SMA wires. Thus, an intermediate mechanism must be used to achieve the requirements of large load.
Based on the above idea, this article puts forward a principle scheme of preloading with a non-self-latching screw pair and unlocking with SMA fiber as the core idea. Its working principle is shown in Figure 1.

Schematic diagram of working principle of locking–release device: (a) locking state, (b) trigger action, and (c) unlock complete.
In the locking state, the nut 1 and the screw 2 of the locking–release device achieve the connection between the delivery end and the load end through the screw pair; the end of screw 2 is in the form of a prism 3, and it forms a slip pair with support 4. The nut 1 forms a sliding pair with the supporting plate 5 under the preload force. The end of the nut 1 forms contact limit with the limit fixture block 8 of the force amplifier 7 through the plane 6, and the other end of the force amplifier 7 is restrained by the limit rod 9.
In the unlocking process, the electric energy is turned into heat energy after the power supply of the SMA trigger device. When the phase transition temperature of the SMA is reached, the SMA triggering device drives the limit rod 9 to rotate and lift the position limit of the force amplifier 7, and then, the force amplifier 7 rotates and lifts the restraint between the plane 8 and the nut surface 6, thereby lifting the nut 1 limit. Since the nut 1 and the screw 2 are connected using a non-self-latching screw pair, the screw 2 only has a motion degree along the axial direction; the strain energy of the initial preload drives the nut 1 to rotate, and then, the connection between the nut 1 and the screw 2 is released and the unlocking function is realized.
Design of unlocking trigger mechanism using SMA fiber
The rotary trigger device based on SMA fiber is mainly composed of an SMA fiber, a fixed bracket of SMA fiber, a tension spring, a trigger shaft, a steering sleeve and a shell. Its structure is shown in Figure 2. The rim of the center trigger shaft is connected to one end of the SMA fiber, and the other end of the SMA fiber and the tension spring are fixed on the support and shell. Considering the driving displacement of the SMA fiber is small and the shell space is limited, the effective stroke of the SMA fiber was increased by winding it. At the same time, the compliance of the SMA fiber is increased using the steering sleeve. In the initial state, the trigger shaft is balanced and static in the initial position for the force of tension spring and SMA fiber. After receiving power, the SMA fiber overcomes the resistance of the tension spring to rotate and produce angular displacement; thus, the original restraint state is released (Figure 3).

Structure of the SMA trigger equipment.

Work flow of SMA trigger equipment.
Constitutive model of SMA fiber and its restoring characteristics
Constitutive model of SMA fiber
In the phase transformation process of SMAs, the relationship between stress, strain, and temperature is the design foundation of an SMA actuator. Liang and Rogers established the one-dimensional constitutive model of SMA fiber based on the minimum free energy principle

where
The elastic modulus, D, and phase transformation modulus,


where
In the process of the phase transformation of SMA, when austenite begins to transform into martensite, assuming the initial volume fraction of martensite is


where
In the process of transformation of martensite into austenite, substituting the martensite volume fraction,


where
Substituting the above parameters into the constitutive equation of SMA, we can obtain

Similarly, when austenite transforms into martensite, the stress of the SMA can be expressed by the following equation

where
Equations (8) and (9) are the one-dimensional constitutive model of SMA. The relationship between the stress, the strain, and the temperature can be determined through this constitutive model.
The restoring characteristics of SMA fiber under typical boundary conditions
Under the one-dimensional condition, the main form of SMA is the fiber form. In addition, the SMA fiber has three methods of restoring: free restoring, restoring under completely restrained conditions, and restoring under partly restrained conditions.
Free restoring of SMA fiber
When the SMA fiber can restore without any limitation, the stress of an SMA fiber

The initial conditions are defined as follows:
When
When

where
When
The above equations are the constitutive model of SMA fiber whose both ends are free. The relationship between the temperature and the stress can be clearly expressed by the constitutive model. The free restoring features of SMA fibers with different initial strains are shown in Figure 4.

Free restoring features of SMA fibers with different initial strains.
Restoring features of SMA under completely restrained conditions
Under the completely restrained conditions, both ends of the SMA fiber are fixed, and there is an initial stress

The initial stress,
When
When
where
When

Similarly, the above equations express the constitutive model of the SMA fiber under the completely restrained condition, and then, the relationship between the temperature and the stress in the process of heating–restoring can be expressed by the above constitutive model. Figure 5 shows the restoring features of SMA fibers with different initial stresses.

Restoring features of SMA fibers with different initial stresses.
According to Figure 5, the phase transformation temperature will increase with the increase in initial stress, and in the phase transformation process, the stress and the temperature have a linear relationship, and the variation trend has nothing to do with the value of initial stress; the stress will slightly linearly increase with the increase in temperature, and this part of stress is caused by the thermal elastic deformation.
Restoring features of SMA fiber under partly restrained conditions
Under partly restrained conditions, one end of the SMA fiber is fixed and the other end of the SMA fiber is connected with the load. The load includes the constant load and the linear spring load.
As for the constant load, the stress in the material remains constant

When
When

where
When

The above equations are the constitutive model of SMA fiber under constant load conditions. The restoring features of SMA fibers with different loads and initial stresses are shown in Figure 6. According to Figure 6, the phase transformation temperature will increase when the load is also increased; in the phase transformation process, the strain variation trends of SMA fibers with different loads are similar with each other; in addition, there is also a little residual strain caused by the applied load.

Restoring features of SMA fibers with different loads and initial strain.
As for the linear spring load, the stress in the SMA fiber linearly changes with the strain. Its model can be established based on Hooke’s law. Figure 7 shows a simplified “Spring-SMA” model.

Spring–SMA fiber model.
The initial length of the SMA fiber is

That is

Substituting these two equations into equation (1), we can get the following
The above equations are the constitutive model of the SMA fiber under the partly restrained condition, and based on this, the temperature–strain relationship in the heating recovery process can be obtained.
Test of the features of SMA fiber
The SMA fiber is the key part of the unlocking trigger equipment. Its performance features have a direct influence on the restoring feature of the unlocking trigger equipment, so it is necessary to test the features of the SMA fiber. The SMA fibers that have different compositions and pretreatment methods have different physical and mechanical properties, so the parameters of the SMA fiber must be determined by experiment. In this design, the SMA fiber was provided by the Beijing General Research Institute for Nonferrous Metals, and its general parameters are shown in Table 1.
Material parameters of SMA fiber.

SMA: shape memory alloy.
In practical applications, SMA fiber is usually driven by a partially constrained boundary with constant load. The response performance of the SMA fiber (restoring stress, restoring strain, and response time) is directly related to heating conditions (current and power time) and load characteristics (constant load and variable load). Therefore, the power response performance test and the load output characteristics test should be performed to evaluate the impact of each of the key factors on the output characteristics.
The theoretical model of the SMA fiber focuses on the internal regularity of the main performance parameters during the whole phase transition. In actual testing, because the surface temperature of the SMA fiber is difficult to measure and actuate, it is difficult to comprehensively monitor the whole process of response performance change. In addition, the mechanism function is related only to the final output stress and displacement of the SMA fiber. Therefore, this article only concerns the final output of the SMA.
Design of test platform for SMA properties
The unlocking drive primarily focuses on the response stress, response displacement, and response time of the SMA fiber. The composition of the design performance test platform is shown in Figure 8, and the experimental platform is shown in Figure 9.
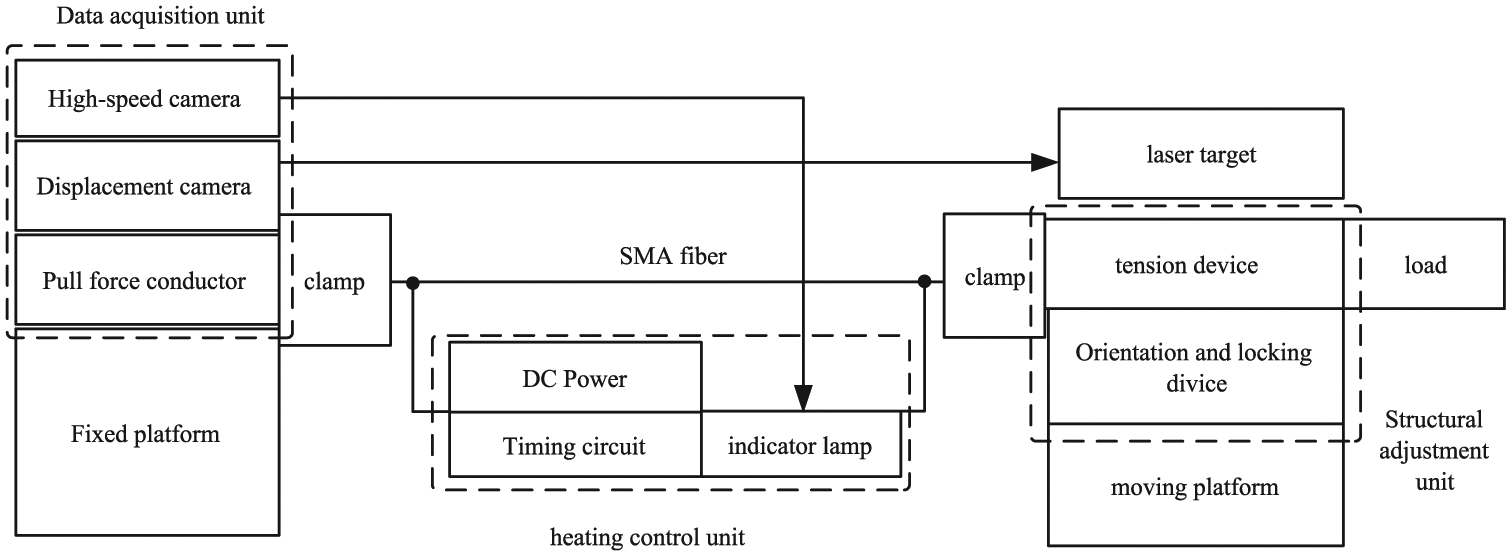
Schematic diagram of SMA test platform.

Test table of SMA fiber characteristics.
The test table consists of the structural adjustment unit, the heating control unit, the data acquisition unit, and other components. The structural adjustment unit consists of the SMA fiber tension device, the guiding device, and the locking device. The tensioning function depends on the precision displacement sliding table to ensure that the SMA fiber is in tension at the test. The guiding function is guided by the linear bearing to achieve axial load transfer and minimize the error caused by friction, and the locking function is used to impose different boundary conditions.
The heating control unit is composed of a direct current (DC) power supply and timing control circuit, which can achieve accurate control of the heating power and heating time and prevent SMA fiber overheat. The data acquisition unit includes a tension sensor, displacement sensor, National Instruments (NI) acquisition system, and high-speed camera, and the pull sensor and displacement sensor are used to collect the restoring force and displacement of SMA fiber. The response time of SMA is measured using the high-speed camera and circuit. The fixed and moving platform are composed of a horizontal sliding table and fine tuning sliding table, which can meet the test need of different lengths of SMA and the focus of laser displacement sensor.
Test of the output feature of SMA fiber under external load
When the lock–release mechanism works, the SMA fiber restores under a certain external load, and it must have enough restoring force and restoring displacement to drive the mechanism. The restoring features of the SMA fiber are influenced by its material, diameter, and the heating condition. In this article, the restoring features of SMA fibers with different diameters and external loads were measured. In addition, the theoretical restoring displacement of SMA fiber under the constant load and part restraint condition was calculated to compare with the experimental results.
Output features of SMA fiber with constant load and different diameters
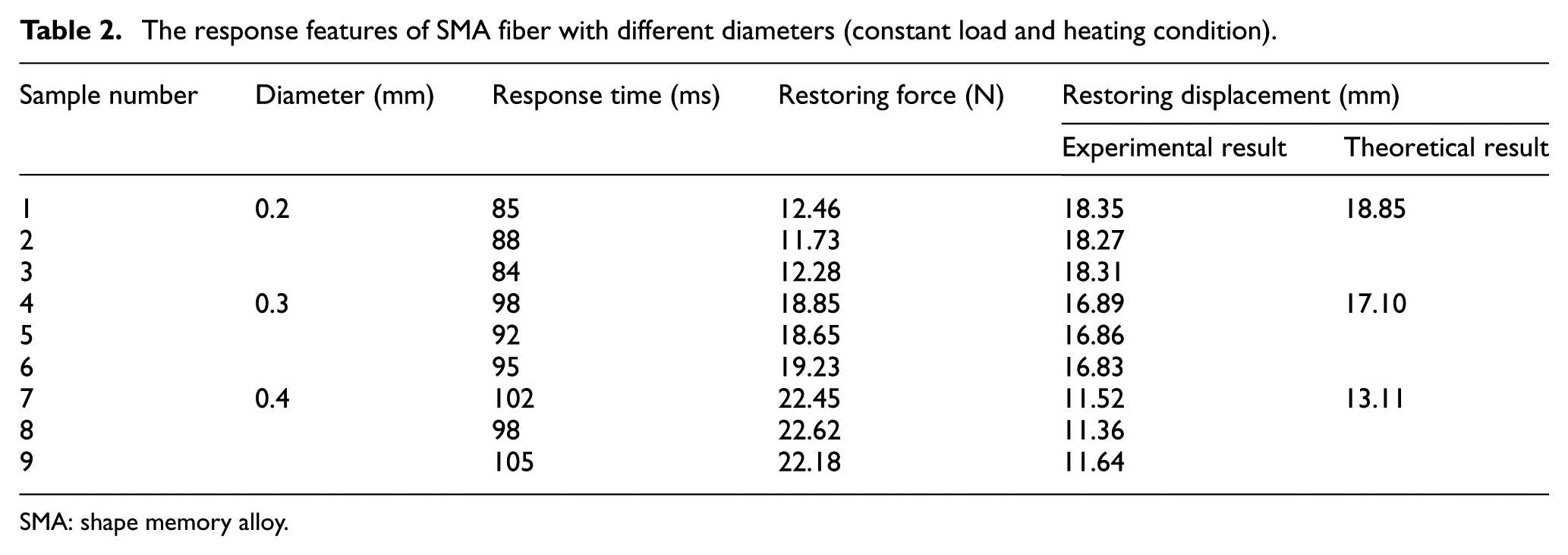
When carrying out the experiment to test the output features of the SMA fiber with constant load and different diameters, the external load was 8 N; the diameters of SMA fiber were 0.2, 0.3, and 0.4 mm; the initial length was 190 mm; the pre-stretch was 10% (the length after stretch is 209 mm); the heating time was 120 ms; and the heating power was 5 A. The final results are shown in Table 2.
The response features of SMA fiber with different diameters (constant load and heating condition).
SMA: shape memory alloy.
According to the results, when there is same external load and heating condition, the restoring force of SMA fiber increases with the increase in the diameter of SMA fiber; however, the restoring displacement gradually decreases and the response time becomes much longer with the increase in the diameter of SMA fiber. Apparently, it needs more energy for the SMA fiber to respond when increasing the diameter of the SMA. The experimental results are identical with our expectation. The restoring displacement determined by the experiment is smaller than the theoretical values because of the influence of the composition of the SMA, the heat treatment process, and the error of the experimental system. Therefore, it can be approximately thought that theoretical model is close to the test results.
Output feature of SMA fiber with constant diameter and different loads
When carrying out experiment to test the output feature of the SMA fiber with constant diameter and different loads, the diameter of SMA fiber was 0.3 mm, its initial length was 190 mm, and its pre-stretch rate was 10% (the length after stretch was 209 mm). The heating time was 100 ms, and the heating power was 5 A. Next, the output feature of SMA fiber, the restoring force, the restoring displacement, and the response time was measured when the external load was 5, 8, and 10 N. The results are shown in Table 3.
Response characteristics of SMA fiber in different load conditions (constant wire diameter and heating conditions).

SMA: shape memory alloy.
Based on the test results, when the diameter of the SMA fiber and the heating condition are constant, the restoring force slightly decreases with the increase in external load, but the influence is not apparent. The restoring displacement also decreases with the increase in external load; however, the restoring time has an opposite variation trend. This suggests that the external load has little effect on the restoring fore of the SMA fiber. The restoring displacement determined by the experiment is smaller than the theoretical values because of the influence of the composition of the SMA, the heat treatment process, and the error of the experimental system. Therefore, it can be approximately thought that theoretical model is close to the test results.
Output features of SMA fiber with constant diameter and linear loads
When carrying out the experiment to test the output feature of SMA fiber with constant diameter and different loads, the diameter was 0.3 mm, the initial length was 190 mm, and the pre-stretch rate was 10% (the length after stretch was 209 mm). The heating time was 100 ms, and the heating power was 5 A. Next, the output features of eight groups of SMA fibers under a linear spring load (4.3–7.8 N) were measured. The result is shown in Table 4.
Response characteristics of SMA fiber in linear load conditions (constant diameter of SMA fiber and heating condition).
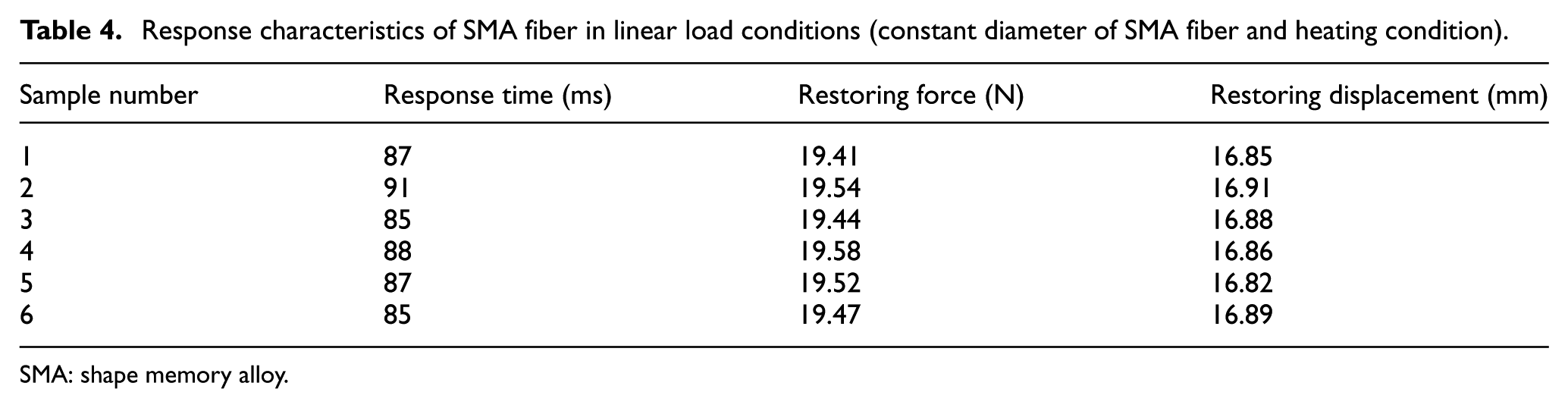
SMA: shape memory alloy.
According to the test results, under the linear load, the maximum restoring force, the restoring displacement, and the response time are all near the results tested in a constant extreme load. Therefore, the variation in load has little effect on the response feature of the SMA fiber.
Test of restoring feature of SMA fiber under repetitive conditions and extreme temperature
Compared with the pyrotechnic devices, an actuator designed using the SMA has a significant advantage that it can be used repetitively, so it is necessary to carry out the test examining the repetitive restoring features. SMA is a kind of material that is sensitive to the temperature, so it is usually used in extreme high- or low-temperature environments. Before using this alloy, its performance in a real extreme temperature environment should be tested.
Repetitive performance test
The SMA fiber used for the experiment had the following parameters: the diameter was 0.3 mm, the initial length was 190 mm, and the pre-stretch rate was 10% (the length after stretch is 209 mm). The external constant load was 8 N, the heating time was 100 ms, and the heating power was 5 A. The experiment was repetitively carried out until the restoring feature of the SMA fiber apparently changed. The test result of a group of SMA fiber samples is shown in Table 5.
Repetitive test result of the restoring feature of SMA fiber.

According to the test result, an SMA fiber can be used repeatedly seven times. Its restoring feature declines with the increase in test number. The SMA fiber has a good restoring feature when the number of tests is no more than 5.
Response test of SMA under high and low temperature
The SMA fiber used for the experiment had the following parameters: the diameter was 0.3 mm, the initial length was 190 mm, and the pre-stretch rate was 10% (the length after stretch was 209 mm). The SMA fiber was fixed in a high-/low-temperature test chamber. The external constant load fixed out of the high-/low-temperature test chamber was 8 N. The structure is shown in Figure 10. The displacement variation of external load is measured using a laser displacement conductor, and the restoring process is finished when the value shown in the laser displacement conductor does not change. The restoring test begins after a 200 ms heating process, and the test result is shown in Table 6.

Feature test system of SMA fiber.
Response performance test of SMA under high and low temperatures.
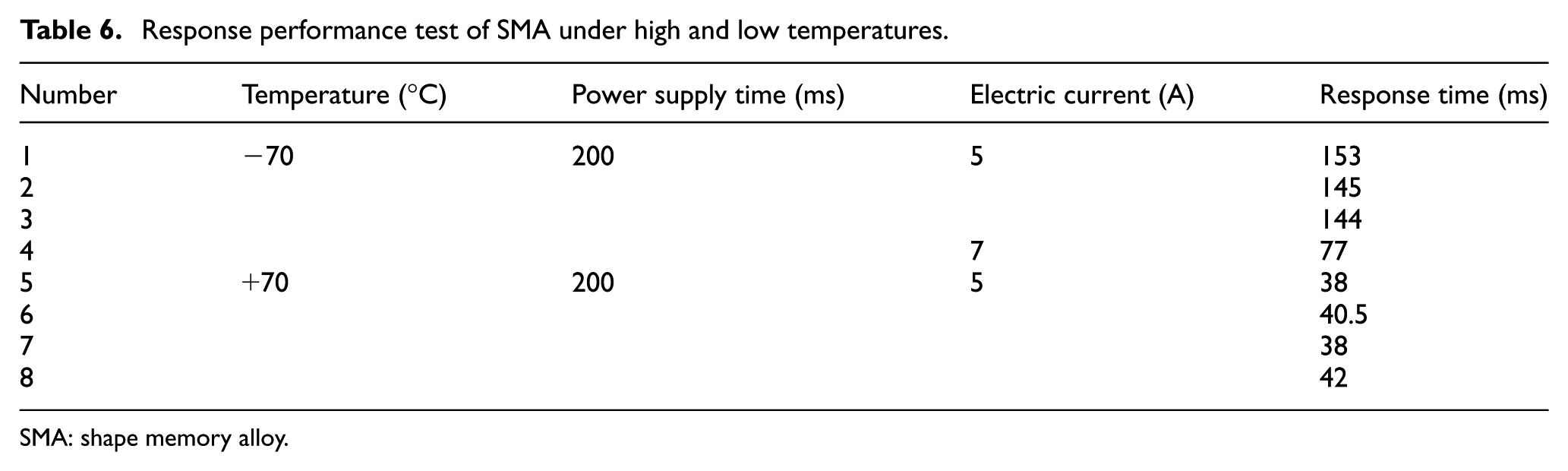
SMA: shape memory alloy.
Experiment results show that the restoring time of the SMA fiber nearly remains constant when the temperature does not change, and the deviation of restoring time is no more than 10 ms. Under the extreme low temperature of −70°C, the restoring time apparently becomes much higher. Raising the electrical power is a good method to decrease the restoring time. For the +70°C condition, the SMA fiber has much less restoring time. Therefore, when the temperature changes from −70°C to +70°C, to keep the deviation of restoring time in an appropriate range, we can use a temperature conductor to simultaneously control the heating power or we can make sure that the temperature of unlocking the trigger device is unchangeable.
Test of the SMA trigger device
A prototype of the unlocking trigger device was produced to carry out an experiment that measures the device’s performance. Because the device has two states of locking and unlocking, the device should have good mechanical and thermal characteristics under the locking state. As for the unlocking state, the unlocking process and the restoring feature are the focus.
Unlocking function test of the trigger device
The time when there was electrical power in the SMA fiber was defined as the initial time of the unlocking process, and the end time was when the thread pair of flywheel nut and bearing screw released. The whole time in this process is defined as the unlocking time. However, in practical terms, it is difficult to determine the moment when the thread pair of the flywheel nut and bearing screw releases; so in this experiment, we approximately used the impact time between the bearing screw and the capture cap, and the unlocking time tested in the experiment is a little longer than the real unlocking time. The test system is shown in Figure 11, and part of the unlocking process captured by high-speed camera is shown in Figure 12.
Unlocking performance test system.

Part unlocking process.
According to the test process captured by high-speed camera and the test result, the unlocking process was successfully triggered, and the unlocking time was 286 ms. The finding demonstrates that this SMA fiber unlocking device has a high restoring speed that meets the design requirement.
Trigger device survival experiment under high temperature
The phase transformation temperature of the SMA fiber used in our design was 82°C–85°C, and the extreme high work temperature of the device was 70°C. In the experiment, the thermal environment was simulated using a high-/low-temperature test chamber. The temperature was raised from the room temperature, and it was set, in order, as 50°C, 60°C, 70°C, 80°C, and 90°C. The temperature in every test point was kept constant for 30 min. The temperature heating rate between these test points was not less than 1°C/min. This temperature variation process is shown in Figure 13.

Section sketch of the test under high-temperature conditions.
The experiment shows us that the lock–release mechanism has a good locking characteristics if the temperature is no more than 80°C, that is, the lock–release mechanism meets the technical requirement that it will not mistakenly unlock when the temperature is lower than 70°C.
Unlocking performance test of trigger device under high–low temperature
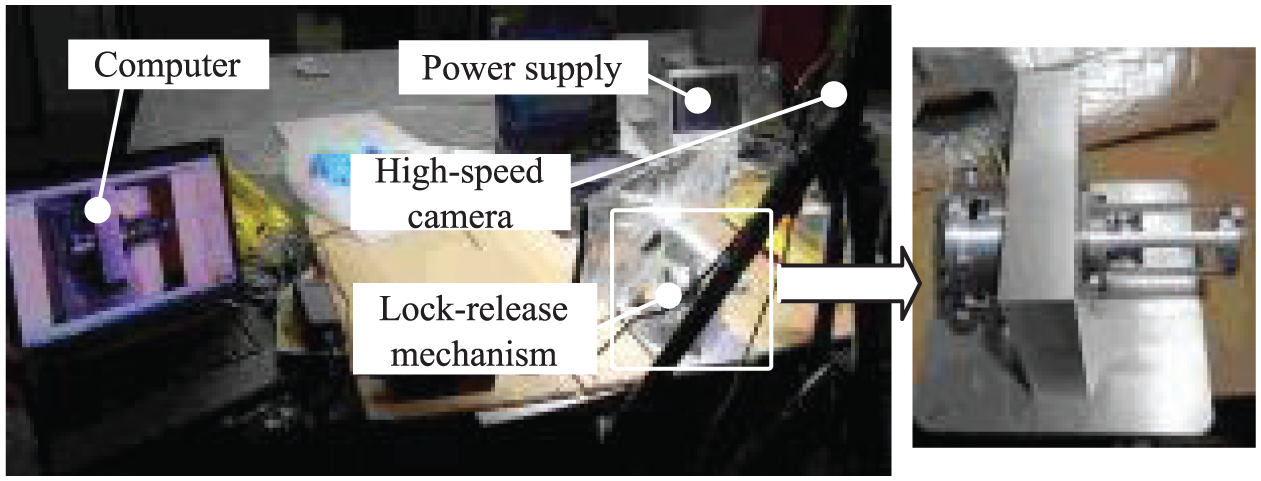
The work environment temperature of a lock–release mechanism is from −70°C to +70°C, so the tests of unlocking performance of the device were carried out at 70°C and −70°C. When carrying out the test, the environment with extreme temperature was simulated using a high-/low-temperature test chamber. The unlocking process and the restoring time were captured by a high-speed camera. The test system is shown in Figure 14. In the process of the high-temperature test, the temperature was first raised to 60°C at a rate of 4°C/min from the room temperature of 22°C. Next, the temperature was raised to 70°C at a rate of 2°C/min. The unlocking experiment was carried out after insulating for 10 min. For the test at the lower temperature, first the temperature was lowered to −60°C at a rate of 4°C/min from the room temperature of 22°C, next it was lowered to −70°C at a rate of 2°C/min, and the unlocking experiment was carried out after insulating for 10 min. All these tests were carried out three times to keep the effectiveness of the test. The results are shown in Table 7.

High-/low-temperature test system of the lock–release mechanism.
Unlocking time of the locking device under high and low temperatures.
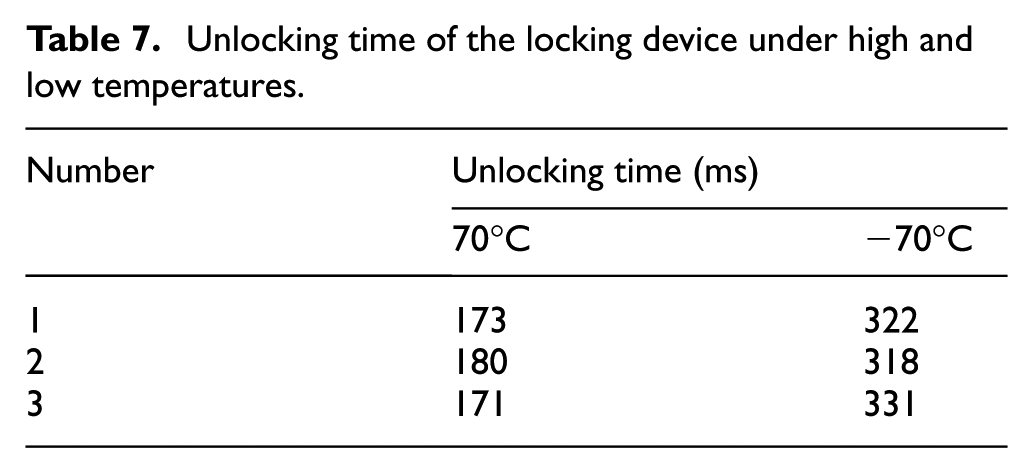
According to the test results, the locking device can successfully unlock when the temperature is +70°C or −70°C. The unlocking time apparently decreases under a high-temperature condition (average time = 175 ms); however, the unlocking time clearly increases under a lower temperature condition (average time = 324 ms). This result directly relates the energy that the SMA fiber needs when the environment temperature increases to the phase transformation temperature.
Conclusion
In this article, a type of unlocking trigger device based on an SMA fiber driving is proposed, which can achieve large bearing capacity, low impact, and rapid connection and separation of the payload under the auxiliary preload mechanism of a non-self-latching screw pair. Based on the material characteristics of the SMA fiber, the one-dimensional constitutive model of the SMA fiber was established, and the mechanical model of the SMA fiber under three typical boundary conditions, free restoring, fully constrained restoring, and partially constrained restoring, were derived. The response characteristics of the SMA fiber under these three typical conditions were obtained. The response characteristics of the SMA wires were tested by a special test platform, and the test results verify the correctness of the theoretical model. The prototype of the locking mechanism based on the SMA trigger device was developed and tested. The results demonstrate that the SMA trigger device can achieve the rapid, low-impact separation of the locking–release device.
Footnotes
Academic Editor: Davood Younesian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.