The main objective of this article is to propose a practical methodology to compute the induced curvature parameters for a line-conjugated tooth surface couple based on the normal vector of its instantaneous contact line. The computing formulae in different form are thus suggested for the preceding normal vector in order for convenient use. Based on this, the formulae for the induced curvature parameters are accordingly given out. Compared to the previous work, the deducing process is more rigorous and more laconic, and the obtained results are more practical. Concurrently, different deducing techniques are provided, and this is beneficial for the development of the meshing theory for gear drives. The theory and method presented are applied to the modified Hindley worm drive, and its basic and important equations are attained. The concrete numerical example is a type I drive, whose conjugate zone is divided into two parts. In one part, the value of the induced principal curvature is much smaller than that in the other one. The biggest induced principal curvature comes into view about at the inlet portion of the worm, and certainly the highest contact stress between the teeth will happen consistently at that position.
As for a line-conjugate tooth surface couple, the induced normal curvature means the difference between the normal curvatures of its two tooth surfaces along a common tangential direction at an instantaneous meshing point on an instantaneous contact line. The induced principal curvature is the principal value of the induced normal curvature. The second surface, that is, the enveloped surface, in a line-conjugate surface couple essentially is the envelope to a one-parameter surface family, which is formed by the first surface, that is, the enveloping surface, under the given relative motion. Therefore, the induced normal curvature can completely be determined by the geometry of the enveloping surface and the relative motion of the surface couple. That is to say, the curvature parameters of the enveloped surface, even its equation, are not required to be known when computing the induced normal curvature. This is the reason why a word “induced” is put into the phrase “induced normal curvature.”
In the literature, a similar concept to the induced normal curvature is the relative normal curvature or the relative curvature for short. Generally speaking, the relative curvature means the difference of the normal curvatures of two surfaces in tangential contact along a common tangential direction. The two surfaces may stay in the line or point contact and the enveloping relation does not have to exist between them. Hence, the relative curvature needs to be obtained from the normal curvatures of the two surfaces in tangential contact. Thus, it can be seen that the induced normal curvature can be viewed as a special case of the relative curvature.
By definition, the induced normal curvature reflects the proximity degree of the two tooth surfaces along their common tangential direction and the curvature relation of the two line-conjugate surfaces. Therefore, the induced normal curvature has been found a broad application in the gear industry, which probably lies in the following three aspects. First, when making the adjustment computation for machining a spiral bevel or hypoid gear with curved teeth, the induced normal curvature can be used as the ground to avoid the interference.1,2 Second, according to the Hertz formula in the contact mechanics, the induced normal curvature can be utilized to measure the contact stress level indirectly.3,4 Third, in accordance with the Dowson formula in the theory of elasto-hydrodynamic lubrication, the film thickness of the lubricating oil at a transient meshing point can approximately be evaluated by means of the induced normal curvature.5
Due to the important applications mentioned above, how to compute the induced normal curvature began to be studied very early. Wildhaber6 and Baxter7 investigated the induced normal curvature for spatial gear drives from the point of view of the meshing theory based on the reference cone. In 1969, Dyson8 published a monograph on the kinematics and geometry of gear pairs, in which the relative curvature computation is touched. In the 1970s, Chen9 researched the induced normal curvature by employing the vector rotation method. Almost at the same time, Sakai10 performed an investigation on the induced normal curvature by employing the binary vector method.
About since the 1960s, Litvin11 started to research the curvature relation of the line-conjugate tooth surfaces. Originally, he proposed the formula to calculate the induced normal curvature, whose precondition for application is to know the normal curvature of the generated surface. After entering the 21st century, he brought forward to calculate the induced normal curvature by means of the curvature parameter matrix.12
In 1985, Wu and Luo13 suggested a general formula to compute the induced normal curvature. In their formula, the derivative of the time with respect to the arc length is included. Afterward, a number of their followers14–19 investigated the computation of the induced normal curvature by virtue of the relative differential technique.
In 1986, Chen20 obtained a computing formula for the induced normal curvature by employing the rotation matrix. A little later, Dong21 simplified the formula achieved for calculating the induced normal curvature and put forward a more utility method to figure down the normal vector of the instantaneous contact line.
In the 1990s, Dooner and Seireg22 studied the computation of the induced normal curvature by exploiting the screw theory. In the mean time, Chen23 studied the computation of the induced normal curvature. In 2012, Dong et al.24 studied the induced normal curvature of the planar gearing transmission. Also in 2012, Radzevich25 introduced the concept of the relative normal curvature to aid the computation of the Hertz stress for a gear drive in his treatise.
Similar to the induced normal curvature, the induced geodesic torsion can be defined as the difference of the geodesic torsions of the two line-conjugate tooth surfaces along a common tangential direction at an instantaneous meshing point. The induced geodesic torsion can be employed to determine the induced principal direction and thus the relevant induced principal curvature can be obtained for a line-conjugate surface couple further. In the literature,13–15,17,20–21 the computing formulae for the induced geodesic torsion were established on the strength of the induced normal curvature.
The aim of this article is to propose a methodology to compute the induced curvature parameter for a line-conjugated tooth surface couple based on the normal vector of its instantaneous contact line. The involved induced curvature parameters include the induced normal curvature, the induced geodesic torsion, the induced principal direction, and the induced principal curvature. In order to illustrate the theory and methodology suggested, the computation of the induced curvature parameters for the modified Hindley worm drive is taken to be an example. The meshing performances of a modified Hindley worm drive are not going to be expounded here because the elaborative exposition in this aspect may obviously be far beyond the scope of this article.
As reported by Buckingham26 and Crosher,27 the Hindley worm drive was initially invented circa in 1765 by Henry Hindley. About in 1909, Samuel I Cone greatly boosted the Hindley worm drive and got his related patent in 1932.28–30 The basic design and manufacture methods of the Hindley worm drive were preliminarily summarized in the literature.31
Beginning from the 1980s, some authors13,14,32–34 researched the computation of the induced normal curvature for the Hindley worm drive. Among them, only Hu et al.32 provided the numerical results.
In the research of Dong,35 the calculation of the induced normal curvature is contained and plenty of numerical examples are supplied. His work is based on the theory of locus surface.
In this work, the curvature parameters of the screw surface of the modified Hindley worm are attained via differentiating the surface equation directly. The normal vector of the instantaneous contact line of the modified Hindley worm pair is represented by means of the moving frame approach. The most important induced curvature parameters, namely the induced principal curvature, of the modified Hindley worm gearing are acquired by taking advantage of the normal vector of the instantaneous contact line. The numerical results are provided for verification and validation.
Equation of generated tooth surface and partial derivatives of meshing function
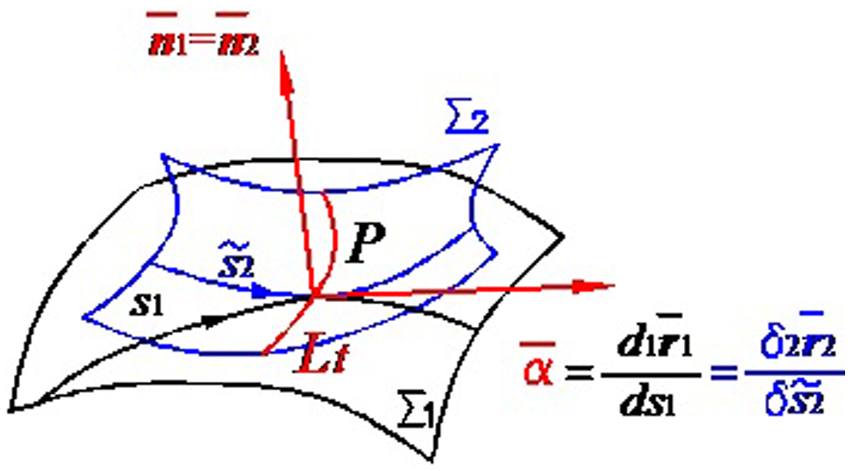
As shown in Figure 1, a fixed coordinate system represents the static space. Simultaneously, two movable coordinate systems, and , are rigidly associated with the two line-conjugate tooth surfaces, and , respectively. In , the equation of can be represented as
where and are the two parameters of . In the usable region of , there is no singular point.
Line-conjugate surface couple.
When the gear 1 revolves around its axis with the angle velocity , its tooth surface forms a one-parameter family of surfaces, , in the fixed space . When the rotation angle of the gear 1 is , the tooth surfaces and are in contact along an instantaneous contact line and the tooth surface of the gear 2 essentially is the envelope to . Therefore, the equation of can be represented as12,13,21
where is the so-called meshing function. Herein and separately are the unit normal vector of and the relative motion velocity of the surface couple at the transient meshing point on the instantaneous contact line , whose expressions are13,21
where is the angle velocity of the gear 2, is the relative angle velocity of the surface couple, and . Under the assumption that , and , in which the notation denotes the time.
In the conjugate zone, the relationship between the unit normal vectors, and , of and is . In the light of the relative differential method,13 it is possible to have
where the notation, , denotes the relative differentiation within , .
The three partial derivatives of can be procured as
where . is called the meshing limit function or the limit function of the second kind,13,21 which is often reaped by taking the ordinary partial derivative of in a specific meshing analysis as well.
Owing to in the conjugate zone, from equation (5), it is easy to have
Singular point condition of envelope and elicitation of normal vector of instantaneous contact line
Singular point condition of envelope
Obviously, the singular point condition for may be represented as . Under this condition, from the first expression in equation (4), it is easy to acquire
Making the dot product on the both sides of equation (8) with respect to and , respectively, yields a system of linear equations in regard to and , which can be expressed as
where , , and are the coefficients of the first fundamental form for . That is to say, , , .
Conducting the total differential to the meshing equation and taking advantage of equation (10) lead to
If bearing in mind that the part at the right end of equation (11) is equal to , it is possible to have
where
In general, is called the curvature interference limit function or the limit function of the first kind.13,21Equation (12) can be regarded as a universal singular point condition for the generated tooth surface.
Elicitation of normal vector of instantaneous contact line
Equation (13) shows that the vector is a linear combination of and , so that it lies in the common tangential plane of and at an instantaneous meshing point. From equations (5) and (13), it is undemanding to know
When , on , the equation of the instantaneous contact line can be written as
Therefore, the tangential vector of the instantaneous contact line can be figured out as
Thereupon, it is possible to have . Hence, and the vector may be called the normal vector of the instantaneous contact line.
Diverse expressions for normal vector of instantaneous contact line
In fact, equation (13) provides a way to calculate , whose operation is completely implemented in a non-unit and non-orthogonal natural moving frame . This makes the calculating process relatively cumbersome. In consequence, it is necessary to explore other ways to compute .
In principal coordinate frame
If the parametric curve net on is consisted of the curvature lines, at an arbitrary point in the meshing region, the principal frame can be constructed, in which and are the unit vectors along the two principal directions of , respectively.
In this case, it is easy to obtain the following results from differential geometry36
where is one of the coefficients of the second fundamental form of and .
By definition and from equation (17), the two principal curvatures of can be figured out as
where and are the other two coefficients of the second fundamental form of , and and .
According to the Weingarten formula36 and using equations (17) and (18), it may have
If the two principal directions of are facile to be obtained, it is convenient to calculate from equation (21). For example, the generating surface is a surface of revolution or an involute helicoidal surface. Otherwise, the calculation of from equation (21) may still be rather tedious.
In arbitrary unit orthogonal frame
In reality, at a discretionary meshing point in the conjugate region of , a unit orthogonal moving frame, , can be built freely. The second unit vector, , can be determined as . The mere condition to select the first unit vector, , is that the normal curvature and the geodesic torsion of along it are all easier to be achieved.
At the meshing point , the position relation between the principal frame and is shown in Figure 2. By means of the circle vector function,37 the representations of the two principal directions in are
where is a directed angle as depicted in Figure 2.
Coordinate frames at instantaneous meshing point .
After substituting equation (22) into equation (21), the expression of the normal vector in can be worked out as
Based on the expressions of and in equation (21), by employing the Euler and Bertrand formulae in differential geometry,36 the component of the normal vector along the direction can be worked out as below
where and are the normal curvature and the geodesic torsion of the generating surface along the direction in several.
In the same manner, the component of the normal vector along the direction can be ciphered out as follows
where is the normal curvature of along the direction and can be figured down as , in which is the mean curvature of .38
Provided the principal directions of the generating surface are difficult to be acquired, it is recommended to calculate by right of equation (23). For instance, the generating surface is the helicoidal surface of a ZN worm or a Hindley worm.
In velocity coordinate frame
Letting causes and a velocity coordinate frame can be attained. From equation (23), the expression of in such a velocity coordinate frame can be represented as
where and are the normal curvature and the geodesic torsion of along in several.
Representation based on derivative of unit normal vector
According to the result in differential geometry,36 along the direction of the relative velocity vector on , the derivative of can be expressed as
where is the arc length of a curve on , whose tangential direction at the instantaneous meshing point is along the velocity vector , as shown in Figure 1.
Induced normal curvature of line-conjugate surface couple
Preparative relation expressions
As shown in Figure 3, the symbol denotes a unit common tangential vector of both and . At the same time, the notations and are the arc lengths of the curves separately on and , whose unit tangential vectors are all . Consequently, it is easy to have
Unit common tangential vector and arc lengths and .
Accomplishing the dot product regarding on both sides of equation (29) and making use of the relative differential method give
Straightforwardly, it is uncomplicated to prove the following commutation relation with regard to the relative differential signs as
Deducing process of induced normal curvature formula
By definition, the normal curvatures of and along can be represented as
Thereupon, the induced normal curvature of the line-conjugate surface couple along can be defined as . After substituting equation (35) into the preceding definition expression and reducing the attained result in terms of the relative differential method and using equations (28) and (29), it maybe has
Actually, both equations (37a) and (37b) are not suitable for being used to compute the induced normal curvature and can only be viewed as the middle results in the process of deducing the induced normal curvature formula. The reason is that and have to be worked out in advance. Furthermore, the related computation is lack of the distinct geometrical significance. Consequently, the user-friendly formula for the induced normal curvature should be equation (37c).
Affiliated outcomes
Letting in equation (37c) and using equation (12) to simplify the consequence, the induced normal curvature along can compactly be obtained as
Without loss of generality, choosing the frame to express the vector yields
where is a directed angle as illustrated in Figure 4.
Induced principal directions and unit common tangential vector .
Equation (40) is the computing formula for the induced normal curvature in the scalar form, which is equivalent to equation (37c).
After knowing the induced normal curvature, the homologous normal curvature of the generated surface can be acquired without differentiating its equation.
Induced geodesic torsion and induced principal directions
Induced geodesic torsion formula
There are two strategies to deduce the computing formula for the induced geodesic torsion. One strategy is to begin with the induced normal curvature. According to their definitions, the induced normal curvature, , and the induced geodesic torsion, , still are the normal curvature and the geodesic torsion in essence. In consequence, the derivative relation is in existence between them, namely
Since both and are all constant at a certain meshing point, substituting equation (37) into (41) causes
Owing to , . Since at a certain meshing point is not concerned with the angle and , . As a result, in order to guarantee that the frame is right-handed, can be represented as
Because the two base vectors and all have nothing to do with the angle at a certain meshing point, it is uncomplicated to understand from equation (39). Substituting this outcome into equation (43) leads to . After substituting this outcome into equation (42), the computing formula for in the vector form can be attained as
The other strategy to deduce the computing formula for the induced geodesic torsion is to begin with the definition thoroughly. The geodesic torsions of and along the common tangential direction can be represented as
By definition and with the help of equations (4), (28), and (33), the induced geodesic torsion, , can thus be procured as
Induced principal directions and induced principal curvatures
Because there is the derivative relation between the induced normal curvature and the induced geodesic torsion as depicted in equation (41), the induced normal curvature have its maximum value along the direction along which . That is to say, such a direction is the induced principal direction. By letting in equation (48), two directed angles, and , can be worked out over the interval , which can be employed to determine the two induced principal directions in the unit orthogonal moving frame . The tangent values of these two directed angles are
From equation (49), it may have . One solution of this trigonometric equation with respect to is . Hence, the two induced principal directions are perpendicular to each other. Additionally, equation (49) illustrates that one induced principal direction is along the normal direction of the instantaneous contact line so that the other is along its tangential direction.
Letting denote the unit tangential vector along the instantaneous contact line, under the condition that the moving frame is right-handed, can be expressed as
By substituting equations (23) and (50) into equation (37), respectively, the two induced principal curvatures along the two induced principal directions can be worked out as
Equation (51) manifests that the non-zero induced principal curvature is along the normal direction of the momentary contact line and the zero induced principal curvature is along its tangential direction. Hence, the maximum absolute value of takes place along the direction .
In the bargain, the induced Gauss curvature of the line-conjugate tooth surface couple can be obtained as . Consequently, the regular meshing points of a line-conjugate tooth surface couple are all the induced parabolic points.
Because can be ciphered out from equations (13), (21), and (23), the computing formula in the scalar form for will have the related manifestation, which is listed as follows
In principle, it is not recommended to compute by means of equation (52). The reason is that the partial derivatives of the meshing function have to be calculated on the side after acquiring from equation (12) based on the normal vector of the instantaneous contact line, . If the two principal directions of the generating surface are simple to be worked out, equation (53) is proposed to be employed and otherwise equation (54) is proposed to be employed.
From equation (53) or (54), the sign of depends on that of . The point on where is its singular point. So, in a practical meshing analysis, if the sign of changes in the whole conjugate zone, it can be concluded that the undercutting exists on the tooth surface of the gear 2.
When evaluating the contact stress for a line-conjugate tooth surface couple, the contact between its tooth surfaces is usually boiled down to the contact of two elastic cylinders owing to the complexity of the geometry. The two cylinders have the parallel axial lines and are in contact along the straight generatrix, which can circa be viewed as the instantaneous contact line of the surface couple. In line with the Hertz formula in the elastic contact mechanics,3,4 the maximum pressure between the teeth can be calculated as
where is a material constant and is the normal force per unit length along the instantaneous contact line of the tooth surface couple.
In the matter of the tooth surface couple under consideration, the parameter is constant and the parameter is almost constant during the action of the tooth surface couple. Therefore, equation (55) implies that the contact stress level, namely the value of , approximately is proportional to at a meshing point. This is the reason why the induced principal curvature can be adopted to reveal the contact stress level between the teeth in the rough. This also is one of the significant intentions to compute the induced principal curvature.
Induced curvature parameter computation for modified Hindley worm drive
Equation of worm helicoid and its unit normal vector
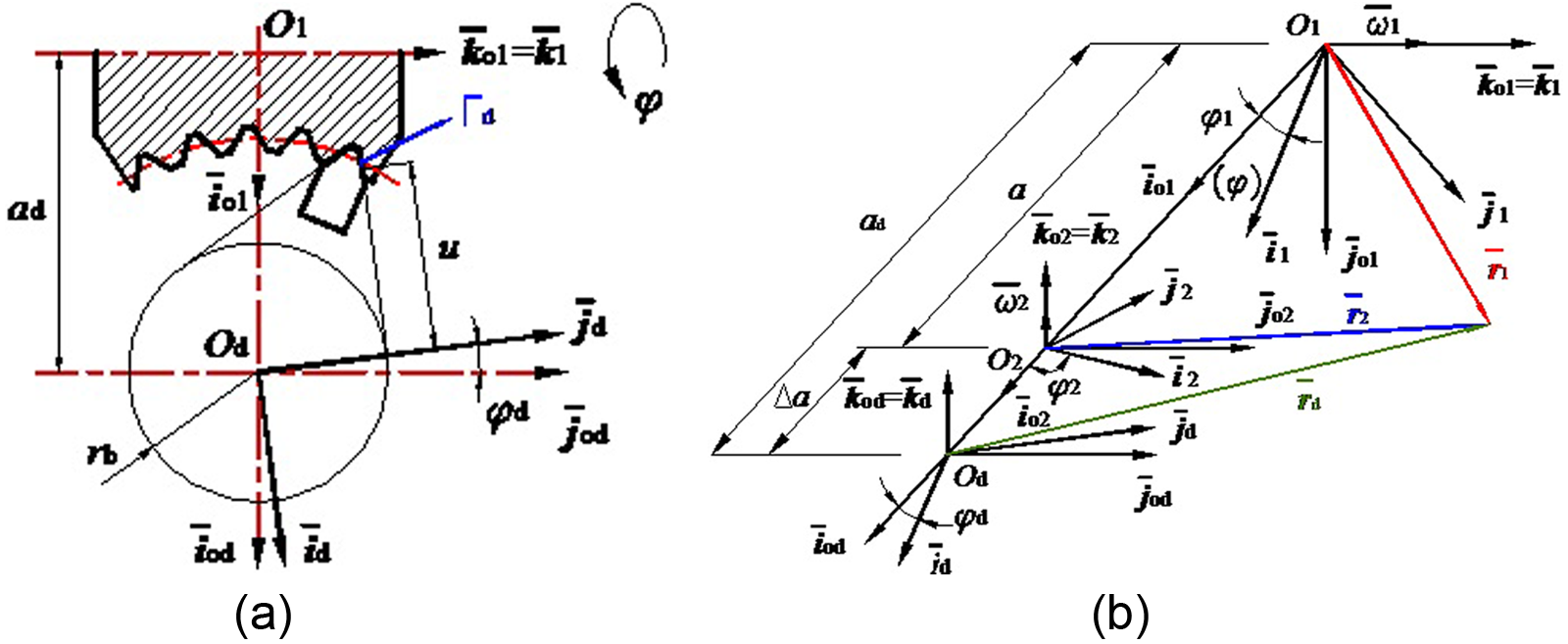
As illustrated in Figure 5, by right of the machining principle of the Hindley worm drive, two fixed coordinate systems, and , are used to indicate the initial positions of the worm blank and the tool post, respectively. Herein the two unit vectors, and , lie separately along their axial lines. Such two unit vectors are mutually perpendicular and the shortest distance between them is the distance from the point to , and . Therein is the operating center distance for machining the modified worm and , where is the center distance of the worm pair and is the modification quantity of the center distance.
Formation mechanism of modified Hindley worm pair: (a) schematic diagram for machining modified Hindley worm and (b) position relation among coordinate systems.
Over and above that, two rotatable coordinate systems, and , are linked to the worm roughcast and the cutter frame, respectively. When the rotation angle of the worm roughcast is , the interconnected rotating angle of the tool apron is and , in which is the operating transmission ratio for cutting the worm blank and . Here, is the transmitting ratio of the worm drive and is the modification quantity of the transmission ratio.
In this study, both and are constant. In , the vector equation of the straight cutting edge, , can be represented as
where is the main basic circle radius of the worm gear.
Via the coordinate transformation, it is possible to attain the equation for the spiral surface, , of the modified Hindley worm in , which can be expressed as
where , , and and are the two parameters of . The symbols, , , and denote the rotation transformation matrices.20,21
By reason of
it is possible to have
From equations (59) and (60), the coefficients of the first fundamental form of can be acquired as follows
On the basis of equation (3), the unit normal vector of can be obtained as
where , , , and .
Curvature parameters of worm helicoid and moving frame on it
Due to for as shown by equation (61), its parameter curve net is not made up of the curvature lines. In such a case, it is suitable for selecting equation (23), instead of equation (21), to calculate in terms of the analysis in section “In arbitrary unit orthogonal frame.” For this, it is profitable to let the unit vector be along the tangential orientation of the parameter u-line of , namely
so that
where
Concerning , the normal curvature and the geodesic torsion along and its mean curvature can be achieved as38
Relative motion
During the engagement of the modified Hindley worm drive, also as shown in Figure 5, two fixed coordinate systems and are utilized to indicate the initial positions of the worm and the worm gear, respectively. Herein the two unit vectors, and , are separately along their axial lines and mutually perpendicular since the discussion in this work is limited to the worm pair with orthogonal axes. The shortest distance between the axes and is the distance from the point to , and .
In addition, two rotatable coordinate systems, and , are linked to the worm and the worm gear in several. When the rotation angle of the worm is , the interconnected rotating angle of the worm gear is and .
By the convention in section “Equation of generated tooth surface and partial derivatives of meshing function,” the worm rotates around with the angle velocity and suitably the angle velocity of the worm gear is . Ergo, the relative angle velocity vector of the worm pair can be figured out in as
By the definition stated in equation (3), the relative velocity vector of the worm pair can be obtained in as
where and .
On top of that, the two unit vectors, and , of can be represented in as
where
Meshing function of worm pair and tooth surface equation of worm gear
By the definition uttered in equation (2), from equations (62) and (67), the meshing function, , of the modified Hindley worm pair can be attained. Then, simplifying the result by taking advantage of the vector rotation approach,21 may finally be represented as
where
and
Via the coordinate transformation and by right of equation (2), the tooth surface equation of the modified Hindley worm gear can be achieved in as
where
Meshing parameters
By virtue of the approach stated in section “Equation of generated tooth surface and partial derivatives of meshing function,” from equation (70), the meshing limit function of the modified Hindley worm drive can be acquired as
According to equation (23), the normal vector of the instantaneous contact line of the modified Hindley worm pair can be expressed in as
where
On the strength of equations (66)–(69), the dot products in the expressions of and in equation (73) can be worked out one by one as follows
According to equation (12), the curvature interference limit function of the modified Hindley worm gearing can be acquired as
Induced curvature parameters
After ascertaining in in equation (73), the induced geodesic torsion along an arbitrary direction can be obtained from equation (44) or (48). According to the theory expounded in section “Induced principal directions and induced principal curvatures,” the two induced principal directions of the modified Hindley worm drive are the tangential direction of the instantaneous contact line and its normal direction. According to the theory and method advanced in section “Induced principal directions and induced principal curvatures,” the induced principal curvature can be reaped from equation (54) since the normal vector of the instantaneous contact line, , in equation (73) is expressed in .
Numerical outcome and discussion
Parameters of modified Hindley worm drive
The main design parameters of the Hindley worm drive under consideration are , , and . Here, is the number of worm thread.
The modification parameters are and . In other words, the involved worm pair pertains to the so-called type I drive.39–41
Outcome and discussion
As for a type I drive, the meshing limit line is of existence on the worm helical surface and can be figured down by letting , which is depicted as the line in Figure 6. On the helicoidal surface of the modified worm, the position of the meshing limit line approximately ascertains the working length of the worm thread.
Conjugate zone and contact lines of modified Hindley worm drive: (a) projection drawing of conjugate zone and contact lines on worm helicoids and (b) conjugate zone and contact lines on worm gear tooth surface.
As Figure 6(b) shows, the whole tooth surface of the worm gear is divided into two parts. One part is the conjugate zone and the other part, locating on the both sides of the conjugate zone , may be called the front transition surface, which is formed by the scraping action of the first cutting blade at the inlet portion of the toroidal hob. Of course, such a toroidal hob is completely identical to the corresponding modified Hindley worm.
On the worm gear tooth flank, the lines and stand for the inlet end of the worm and the line is the conjugate line of the meshing limit line, which splits up the whole conjugate zone into two sub-conjugated zones. One is the zone (denoted by a notation ) and the other is (denoted by a notation ).
After the value of the angle is preset, two instantaneous contact lines can be determined in the sub-conjugated zones and , respectively. After changing the value of , two families of the instantaneous contact line can be attained separately in and . The contact lines in are numbered from 1 to 4 while those in are numbered from 1′ to 4′.
Along every contact line, from the top to the root of the worm gear tooth, three meshing points are selected in turn, which are designated by the letters a, b, and c. At every meshing point, after the value of the angle is given in accordance with the contact line, the parameter can be expressed as a function with respect to by employing the meshing equation . A nonlinear equation with respect to can then be obtained in the light of the position of the instantaneous meshing point in question. The value of can be acquired by solving such a nonlinear equation iteratively as well as the value of can be worked out. As a consequence, one meshing point can be determined and the other meshing points can also be determined in line with the same procedure and approach. All the acquired results are supplied in Table 1.
Computing results of (mm), (°), (°), and (1/mm).
1′
2′
3′
4′
4
3
2
1
a
323.4782
325.7881
324.9678
324.7637
324.7559
324.7560
324.7570
324.7586
1.8779
3.3318
4.8869
6.5180
0.3181
−1.0562
−2.4492
−3.8443
0.0058
0.0045
0.0020
2.2448e−04
4.2501e−04
0.0428
0.2311
0.9284
b
310.5053
309.6158
309.2360
309.1300
309.1250
309.1251
309.1263
309.1280
2.0495
3.5207
5.0109
6.5470
0.3170
−1.0583
−2.4509
−3.8456
0.0038
0.0026
0.0013
1.6145e−04
2.6263e−04
0.0195
0.0918
0.3019
c
297.6397
297.6379
297.6366
297.6358
297.6358
297.6366
297.6379
297.6397
2.1576
3.6033
5.0659
6.5672
0.3130
−1.0600
−2.4522
−3.8467
0.0028
0.0020
0.0011
8.0880e−05
8.5796e−05
0.0116
0.0511
0.1547
After determining the values of , , and , the values of at the selected instantaneous meshing points can be ciphered out conveniently from the formulae developed in sections “Induced geodesic torsion and induced principal directions” and “Induced curvature parameter computation for modified Hindley worm drive” and the obtained results are also listed in Table 1.
In the light of the data provided in Table 1, it is easy to verify from equation (62). In view of this, points from the space to the entity of the worm. In such a case, no curvature interference happens for the numerical example due to in the whole conjugate zone as shown by the data in Table 1.
The data in Table 1 also indicate that the values of in generally are smaller than those in . This implies that the contact stress level in is lower in line with the principle set forth in section “Induced principal directions and induced principal curvatures.” On the other hand, in both and , the smaller becomes visible near the line . The smallest appears near the point while the biggest appears near the point in , where the contact stress level consistently is the highest on the tooth surface of the worm gear.
Conclusion
The full work of this study discloses the core role and the fundamental position of the normal vector of the instantaneous contact line in the meshing theory for the line-conjugate tooth surfaces. The normal vector of the instantaneous contact line is connected with not only the curvature interference limit function but also the induced normal curvature, the induced geodesic torsion, the induced principal direction, the induced principal curvature, and so on.
Given this, the computing methodology for the normal vector of the instantaneous contact line is worthy of being investigated deeply. Therewithal, the computing formulae in different form are suggested for the normal vector of the instantaneous contact line in order for convenient use.
Based on this, the formulae for the induced curvature parameters are accordingly given out. In contrast with the previous work, the deducing process is more rigorous and more succinct as well as the obtained results are more practical. Concurrently, different deducing techniques are provided and this is beneficial for the development of the meshing theory for gear drives.
As an application of the theory and methodology put forward, the computation of the induced curvature parameters for the modified Hindley worm drive is taken into account. Some basic and important equations, including the normal vector of the instantaneous contact line, the meshing function, the meshing limit functions, and the induced principal curvature, are achieved for the worm drive.
The numerical example is a type I drive, whose whole conjugate zone on the worm gear tooth flank can be divided into two parts by the conjugate line of the meshing limit line. In one sub-conjugate zone, the value of the induced principal curvature is much smaller than that in the other one. The biggest induced principal curvature comes into view about at the inlet portion of the worm, and certainly the highest contact stress between the teeth also happens roughly at that position.
Footnotes
Appendix 1
Handling Editor: Yangmin Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research work in this paper was fully supported by National Natural Science Foundation of China under Grant No. 51475083, New Century Excellent Talents Project by Education Ministry of China under Grant No. NCET-13-0116, the Fundamental Research Funds for the Central Universities under Grant No. N160304012, and National Key Basic Research Development Plan of China (the 973 Program) under Grant No. 2014CB046303.
References
1.
ZengT. Design and processing of spiral bevel gear. Harbin, China: Harbin Institute of Technology Press, 1989 (in Chinese).
2.
DongX. Design and manufacture of epicycloidal bevel and hypoid gears. Beijing, China: China Machine Press, 2003 (in Chinese).
3.
JohnsonKL. Contact mechanics. Cambridge: Cambridge University Press, 1985.
4.
ZhuXZhongkaiECaiCet al. Analysis of load capacity for gears. Beijing, China: Higher Education Press, 1992 (in Chinese).
5.
WenSYangP. Elasto-hydrodynamic lubrication. Beijing, China: Tsinghua University Press, 1992 (in Chinese).
6.
WildhaberE. Meshing theory of spiral bevel and hypoid gear drives (trans. ZZhang). Beijing, China: China Machine Press, 1958 (in Chinese).
7.
BaxterML. Chapter 1: basic theory of gear-tooth action and generation. In: DudleyDW (ed.) Gear handbook: the design, manufacture and application of gears. New York: McGraw-Hill Education, 1962, pp.1-1–1-21.
8.
DysonA. A general theory of the kinematics and geometry of gears in three dimensions. Oxford: Clarendon Press, 1969.
9.
ChenZ. Principle of conjugate surfaces, vols 1 and 2. Beijing, China: Science Press, 1974; 1977 (in Chinese).
10.
SakaiT. Takao Sakai anthology (trans. YLi). Shenyang, China: Shenyang Municipal Association for Science and Technology, 1984 (in Chinese).
11.
LitvinFL. Meshing principle for gear drives (trans. LuXGaoYWangS, 1984). 2nd ed.Shanghai, China: Shanghai Science and Technology Press, 1968 (in Chinese).
12.
LitvinFLFuentesA. Gear geometry and applied theory. 2nd ed.Cambridge: Cambridge University Press, 2004.
13.
WuDLuoJ. Meshing theory for gear drives. Beijing, China: Science Press, 1985 (in Chinese).
14.
HuL. Spatial meshing theory and its application, vols. 1 and 2. Beijing, China: Coal Industry Press, 1987 (in Chinese).
15.
ChenCTangYWuH. Differential geometry and its application in mechanical engineering. Harbin, China: Harbin Institute of Technology Press, 1998 (in Chinese).
16.
FuZ. Differential geometry and meshing principle for gear drives. Dongying, China: University of Petroleum Press, 1999 (in Chinese).
17.
WangS. A simple course on meshing theory for gear drives. Tianjin, China: Tianjin University Press, 2005 (in Chinese).
18.
LiG. Spatial geometry modeling and its application in engineering. Beijing, China: Higher Education Press, 2007 (in Chinese).
19.
WuX. Meshing principle of gear drives. 1st and 2nd ed.Xi’an, China: Xi’an Jiaotong University Press, 1982; 2009 (in Chinese).
20.
ChenW. Meshing theory for gear drives. Beijing, China: Coal Industry Press, 1986 (in Chinese).
21.
DongX. Foundation of meshing theory for gear drives. Beijing, China: China Machine Press, 1989 (in Chinese).
22.
DoonerDBSeiregAA. The kinematic geometry of gearing. Hoboken, NJ: John Wiley & Sons, 1995.
23.
ChenN. Curvatures and sliding ratios of conjugate surfaces. ASME J Mech Des1998; 120: 126–132.
24.
DongHTingKLYuBet al. Differential contact path and conjugate properties of planar gearing transmission. ASME J Mech Des2012; 134: 061010.
25.
RadzevichSP. Theory of gearing: kinematics, geometry and synthesis. Boca Raton, FL: CRC Press, 2012.
CrosherWP. Design and application of the worm gear. New York: ASME Press, 2002.
28.
LitvinFL. Development of gear technology and theory of gearing. Cleveland, OH: NASA Reference Publication, 1997.
29.
DudasI. The theory and practice of worm gear drives. London: Penton Press, 2000.
30.
ZhaoYZhangY. Advances in the research of hourglass worm drives. In: Proceedings of international symposium theory and practice of gearing, Izhevsk, Russia, 21–23 January 2014, Kalashnikov Izhevsk State Technical University, IFToMM.
31.
Editorial Committee for Gear Handbook. Gear handbook, vols 1 and 2. 2nd ed.Beijing, China: China Machine Press, 2004 (in Chinese).
32.
HuSLiSDongX. Design of worm drives, vol. 2. Beijing, China: China Machine Press, 1987 (in Chinese).
33.
FuZZhaoSYangLet al. Novel types of worm drive. Xi’an, China: Shaanxi Science and Technology Press, 1990 (in Chinese).
34.
ZhouL. Modification principle and manufacturing technology of hourglass worm drives. Changsha, China: National University of Defense Technology Press, 2005 (in Chinese).
35.
DongX. Design and modification of hourglass worm drives. Beijing, China: China Machine Press, 2004 (in Chinese).
36.
WuD. Lecture notes on differential geometry. 4th ed.Beijing, China: The People’s Education Press, 1982 (in Chinese).
37.
ZhaoYZhangY. Determination of the most dangerous meshing point for modified hourglass worm drives. ASME J Mech Des2013; 135: 034503.
38.
ZhaoYZhangY. Novel methods for curvature analysis and their application to TA worm. Mech Mach Theory2016; 97: 155–170.
39.
ZhaoYKongJLiGet al. Tooth flank modification theory of dual-torus double-enveloping hourglass worm drives. Comput Aided Design2011; 43: 1535–1544.
40.
ZhaoYWuT. A general modification theory for double-enveloping hourglass worm drives. Key Eng Mater2011; 486: 279–282.
41.
ZhaoYZhangZ. Computer aided analysis on the meshing behavior of a height-modified dual-torus double-enveloping toroidal worm drive. Comput Aided Design2010; 43: 1232–1240.