
Abstract
Aerial work platform is a special vehicle for carrying personnel to the appointed site in the air for operations. Therefore, the work platform requires high stability. This article proposes a sliding mode controller based on neural network for tracking control of folding-boom aerial work platform. Since the chattering caused by sliding mode controller with high-speed switching control may lead to system performance degradation, continuous control obtained from neural network system replaces discontinuous switching control to eliminate chattering. Furthermore, the whole system is proved to be stable by Lyapunov stability theorem. Finally, numerical results show that the designed controller can eliminate the chattering resulting from switching control in sliding mode controller and inhibit the vibration of work platform when there exists system uncertainty. Moreover, the controller is effective for the reduction of tracking error.
Keywords
Introduction
The folding-boom aerial work platform is a type of engineering vehicle which is used for enhancing the personnel to the designated place for installation and maintenance, as shown in Figure 1. 1 Therefore, it requires high stability for the security of people working on the platform. As the extensive use of light-long beam in the structure of arm system of aerial work platform, elastic deformation of beam cannot be ignored to guarantee work platform’s stable motion. For realizing trajectory tracking of aerial work platform, adaptive neural network controller is adopted in Jia et al. 2 and self-tuning fuzzy proportional–integral–derivative (PID) control scheme is proposed in Miao et al. 3 However, the deformation of beam is not considered in the established model. Based on the theory of flexible multi-body dynamics and Lagrange’s equation, the model of folding-boom aerial work platform with flexible beam driven by hydraulic cylinder is established, and the vibration existed in flexible beam is shown in Hu et al. 1 Besides, the similar model is obtained, and fuzzy PID is used for the trajectory tracking of work platform in Meng, 4 but this study only gives simulation results, and the stability of system is not proved. In addition, backstepping control method of work platform is proposed in Hu et al. 5 based on the model in Hu et al. 1 However, this method can only be used for the accurate models. In fact, there exists parameter uncertainty in the model of folding-boom aerial work platform. Sliding mode control (SMC) has robustness to model uncertainty, 6 which has been widely used for the control of nonlinear system. This article proposes an SMC method used for tracking control of aerial work platform. As a robust control scheme, SMC can make the state of the system move along the designed sliding mode surface using the switching control strategy. However, as the discontinuous switching property of SMC, it is difficult to make system state converge to equilibrium point along the sliding mode surface strictly. As a result, the chattering will be occurred. To reduce the chattering, several approaches have been proposed,7–15 among which, neural network system is an alternative method.13–15 Artificial neural network is derived from biological networks, 16 which is a kind of dynamical complex network17–18 being closely relevant to the graph theoretic methods. As neural network system has capability of approximating any nonlinear function with arbitrary precision on a compact set based on the universal approximation theorem, it can solve the chattering problem existed in SMC. In Sun et al., 19 a neural network–based sliding mode adaptive controller is proposed for robot manipulators; however, the link is considered as rigid. In addition, the similar control method is used for flexible links in Tang et al., 14 but the links are driven by DC motors instead of hydraulic cylinder used in aerial work platform. In this article, a neural network–based sliding mode control (NNSMC) for tracking control of aerial work platform with flexible beam driven by hydraulic cylinder is presented. The proposed controller combines universal approximation capability of neural network system with the robustness of sliding mode controller. Based on the Lyapunov stability theorem, NNSMC can guarantee the stability of the whole system. In addition, the simulation results show that the aerial work platform’s tracking error can be reduced, and the vibration can be inhibited effectively when there exist model parameter uncertainties.

Scheme of folding-boom aerial work platform.
This article is organized as follows. In section “Flexible multi-body dynamic equations of work platform,” the dynamic equations of aerial work platform is introduced and analyzed. Then, a NNSMC is designed to attain the control objective in section “Design of NNSMC.” In section “Simulation results,” the simulation study for tracking control of aerial work platform is carried out, and finally concluding comment is provided in section “Conclusion.”
Flexible multi-body dynamic equations of work platform
The flexible multi-body dynamic equations of aerial work platform can be written as 1

In equation (1),

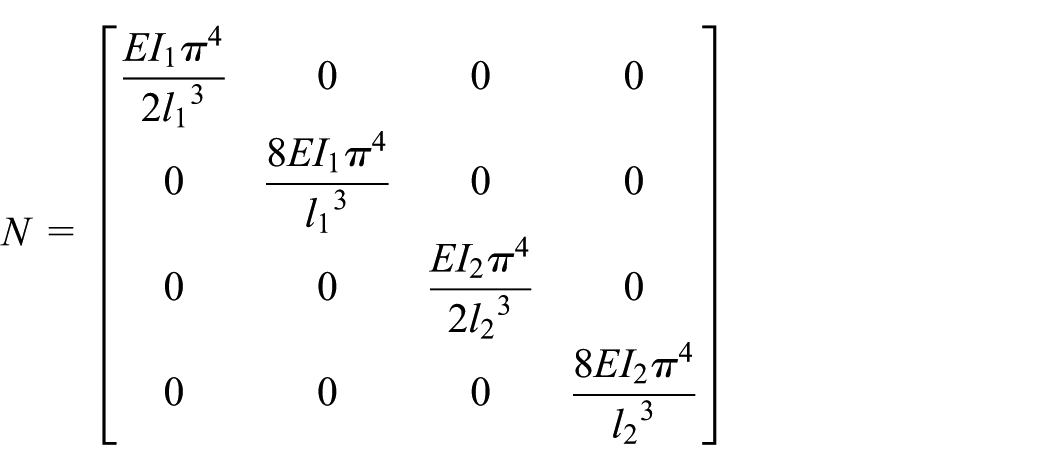
N is the coefficient matrix corresponding to generalized coordinate q and is given by
In addition, U and V are the coefficient matrices corresponding to

R is a column vector and is given by

Design of NNSMC
Design of SMC
Define generalized coordinates as

where

in which
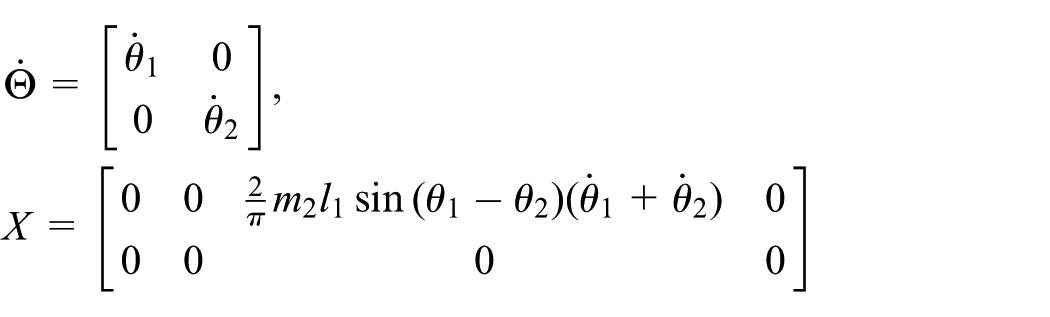
In addition,

where
in which
The model of folding-boom aerial work platform has following properties:
Property 1. The matrix
Property 2.
For convenience,

where

where
Therefore, the tracking control is expressed as follows: design a control law u to make sliding mode occur on sliding surface (equation (4)), then tracking error (equation (3)) approaches zero asymptotically with a prescribed transient response. 9 Define the reference state

Then, the control law u designed is shown below

where

wherein

Substituting equation (5) into equation (2) leads to

where
For the dynamic model (equation (2)) with sliding surface (equation (4)), the stability of overall system with sliding mode controller can be ensured by control law (equation (5)). 11 That is to say, the actual trajectory is able to follow the desired trajectory.
Although the SMC can guarantee stability of the overall system, there is chattering phenomenon on sliding surface since switching control
Design of NNSMC
The radial basis function neural network (RBFNN), which has input layer, hidden layer, and output layer, is adopted in NNSMC. Figure 2 shows the structure of RBFNN. 20

Radial basis function neural networks.
Let

then the output of RBFNN can be expressed as
As the universal approximation ability of RBFNN,
21
the RBFNN with enough number of hidden layer neurons can be used to identify the

where
To eliminate chattering in SMC, neural network output

where the RBFNN weight matrix

Substituting equation (9) into equation (2) leads to

Theorem 1
For the dynamic model (equation (2)) with the tracking error (equation (3)), the sliding surface is defined as equation (4), and the neural network–based sliding mode controller is designed as equations (9) and (8), then the actual trajectory can converge to the desired trajectory.
Proof
Define

where

in which

As

Substituting equation (14) into equation (13) leads to

Substituting equations (7), (8), and (10) into equation (15) gives

Define the error of neural network weights as

then

Define

Since

In addition, according to Schwarz inequality

and the following inequality

where
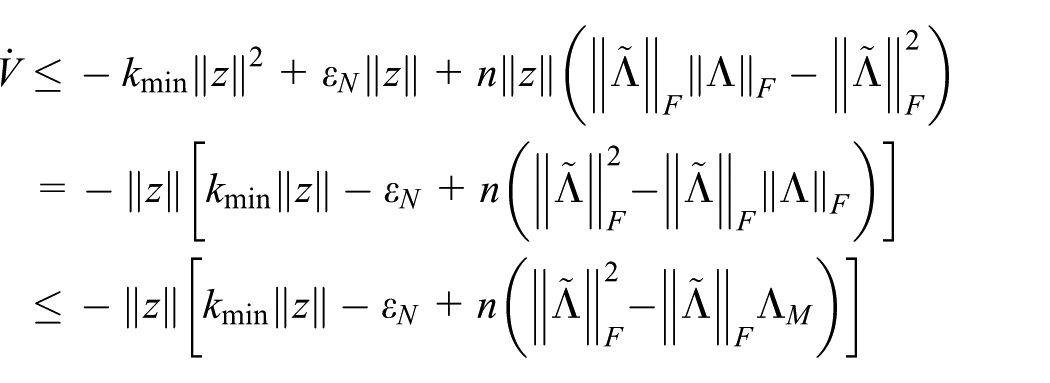
In order to ensure

Therefore, the above inequality is tenable when
Simulation results
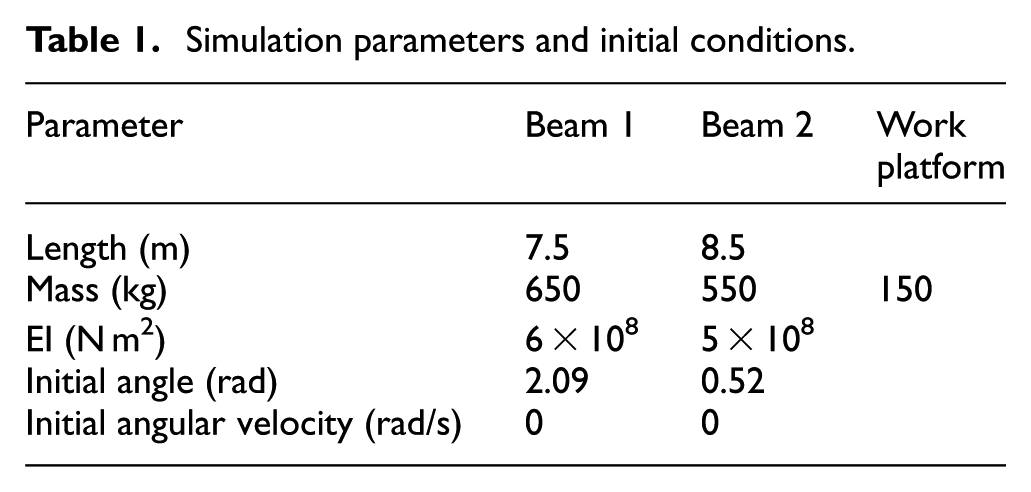
The choices of simulation parameters and initial conditions are listed in Table 1.
Simulation parameters and initial conditions.
Reference trajectory is given by

then

In equation (5), the control parameters are set as

And
In equation (9), the same control parameters are chosen for the convenience of comparing with SMC. Simultaneously, the parameters in equation (12) can be chosen as

Gaussian basis functions are selected as

where the center of Gaussian function

The tracking of
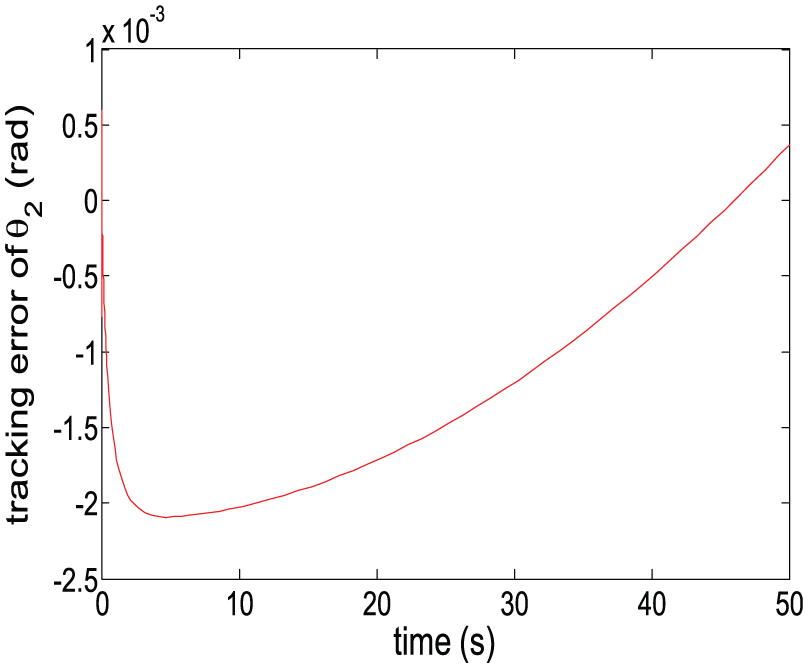
The tracking error of

The trajectory tracking of the work platform in the NNSMC.

The trajectory tracking error of the work platform in the horizontal X direction in the NNSMC.

Deflection variable
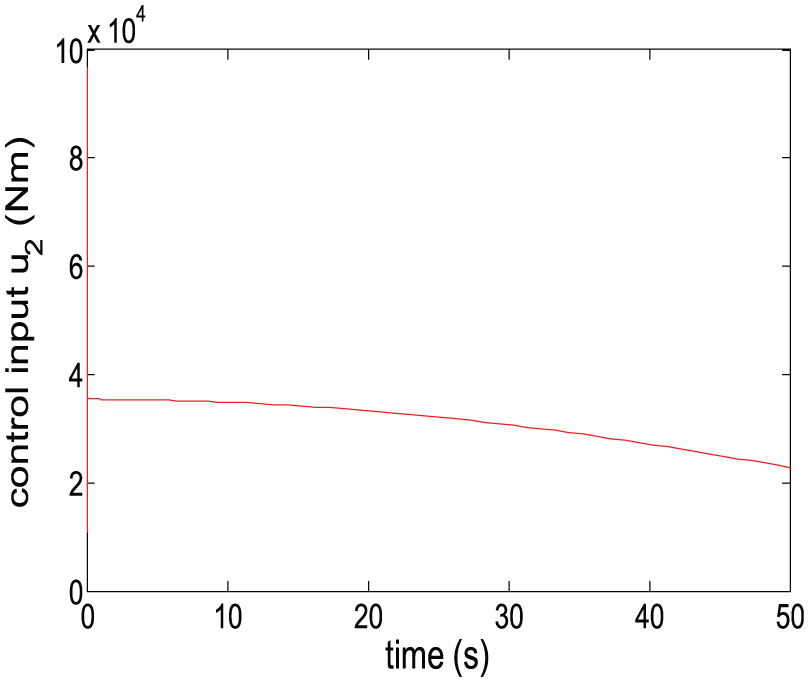
The adjustment of the control input
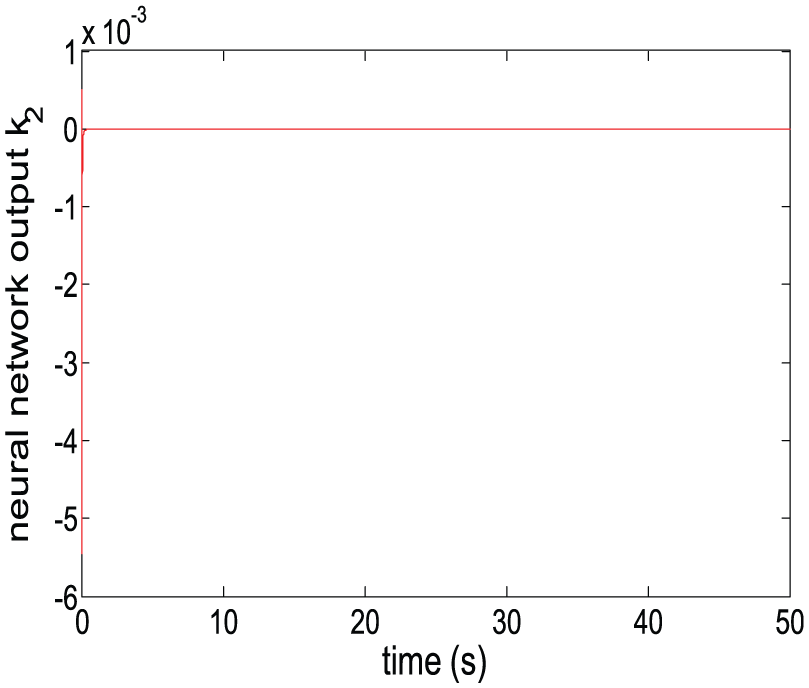
The output
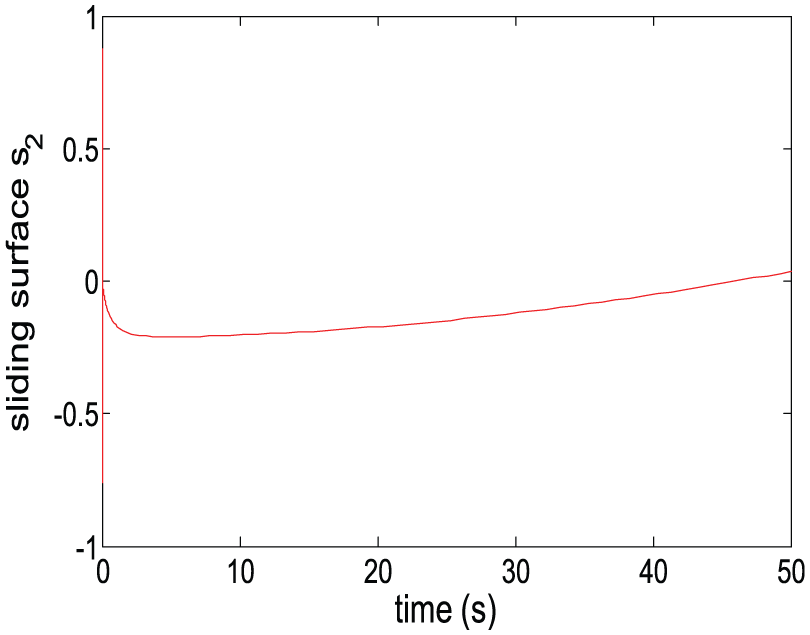
Sliding surface of

The trajectory tracking of the work platform in the SMC.

The trajectory tracking error of the work platform in the horizontal X direction in the SMC.

The adjustment of the control input

The switching control
From Figures 3–10, it can be seen that the proposed NNSMC for the uncertain model can realize the tracking control of work platform and suppress the vibration simultaneously. Figures 3 and 5 reflect that the actual trajectories of
Figures 4 and 6 are the tracking errors of work platform on
Figure 7 demonstrates that vibration is effectively restrained. Deformation variable converges to small values, which means that the vibration existed in flexible beam is weakened effectively.
Figure 8 shows the adjustment of control input
As shown in Figure 10, the NNSMC in this article can make sliding surface s2 converge to zero gradually. This reflects that tracking error of
Figure 11 demonstrates that work platform can be driven to desired trajectory by SMC. Although tracking error in Figure 12 is small, there is high-frequency chattering in the control input
Figure 14 is the adjusted process of switching control
With the comparison between Figures 3–10 and Figures 11–14, we conclude that the presented NNSMC can achieve good tracking performance and eliminate the chattering caused by switching control existed in SMC simultaneously.
Conclusion
In this article, SMC method is used for the model considering the flexible deformation of beam to reduce tracking error and suppress vibration of work platform when there exist system uncertainties. As the switching gain is needed for compensation of model uncertainties, the chattering phenomenon, which degenerates the system performance, is occurred. In order to eliminate the chattering, we propose NNSMC using continuous control acquired from neural network to replace discontinuous switching control. In the NNSMC, neural network output k can compensate the model uncertainties and the chattering is eliminated effectively. As the weight update law of neural network is obtained from Lyapunov method, the stability and convergence of the whole system can be assured. Simultaneously, the results of simulation demonstrate that the designed NNSMC is effective for eliminating chattering caused by switching control existed in SMC. Moreover, we can see that the good performance of NNSMC is achieved for work platform’s vibration restraining and tracking error reducing.
The main contribution of this research is the proposition of NNSMC for the model of aerial work platform with flexible beam. Both the theoretical proof and simulation results show that the controller is effective for trajectory tracking and vibration suppressing when there exist system uncertainties. However, the current results are limited in two aspects: (1) in order to apply to practice, the NNSMC should be converted into digital form further. (2) There exist difficulties in the construction of experimental platform to verify the effectiveness of NNSMC at present. These limitations will be improved in the future work.
Footnotes
Handling Editor: Francesco Massi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation (NNSF) of China (Grants No. 61374054 and 61571064), by Fundamental Research Funds for the Central Universities (Grants No. 31920160003 and 31920170141), and by Natural Science Foundation of Inner Mongolia (Grant No. 2015MS0623).