
Abstract
In this article, the dynamical behavior of a single degree-of-freedom impact oscillator with impulse excitation is studied, where the mass impacts at one stop and is shocked with impulse excitation at the other stop. The existing and stability conditions for periodic motion of the oscillator are established. The effects of system parameters on dynamical response are discussed under different initial velocities. It is found that smaller shock gap than impact gap could make the periodic motion more stable. The decrease in natural frequency would consume less impact energy, make the vibration frequency smaller, and reduce the vibration efficiency. Finally, the dynamical properties are further analyzed under a special case, that is, the shock gap approaches zero. It could be seen that the larger shock coefficient and impact restitution coefficient would make vibration period smaller. Based on the stability condition, there are an upper limit for the product of shock coefficient and impact restitution coefficient, so that a lower limit of corresponding vibration period exists.
Introduction
There are often low-speed reciprocating impacts between some mechanical components, which may lead to fatigue damage of mechanical parts or lower the system efficiency. 1 Therefore, it is necessary to study the relationship between working performance and dynamical properties of the impact system.
Numerical simulation method has been widely used in the impact vibration system due to its complicated nonlinearities. Wen et al. 2 introduced an impact damper system in which the discontinuous jumping to quasi-periodic attractors from non-impact grazing periodic orbits were revealed, and the origin of the quasi-periodic attractor and coexistence of different solutions were analyzed. Li et al. 3 detected the existence of asymmetric sub-harmonic orbits outside the homoclinic orbits of an inverted pendulum impacting on rigid wall under external periodic excitation. Li et al. 4 extended the well-known Melnikov method for smooth system to a class of piecewise smooth planar system, used the Hamiltonian function to measure the distance of the perturbed stable and unstable manifolds, and studied the chaotic dynamics in the piecewise smooth system numerically. Chu et al. 5 investigated the impact vibration characteristics of a shrouded blade with asymmetric gaps under wake flow excitation. U Andreaus and MD Angelis 6 researched nonlinear dynamic response of a base-excited single degree-of-freedom (SDOF) oscillator with double-side constraints. Dimentberg and Iourtchenko 7 considered an SDOF oscillator with one-side rigid barrier at its equilibrium position and found that the excitation bandwidth ratio was a key governing parameter. Dynamic response of an SDOF oscillator excited by a base acceleration and constrained by two unilateral constraints was also studied. 8
All the above analyses were primarily based on numerical method, but analytical method was also used in some impact systems, especially in the majority with analysis of unilateral and bilateral symmetric impact. Shaw and Holmes 9 studied an SDOF piecewise linear oscillator, found the coexistence of sub-harmonic and chaotic motions, and analyzed different bifurcation phenomena in the oscillator. Xu et al. 10 analytically obtained homoclinic orbits and Melnikov function for a Duffing vibro-impact oscillator. Pavlovskaia and Wiercigroch 11 presented a semi-analytical method which could be developed to compute periodic solutions for a new model of an impact oscillator with a drift. A linear oscillator with one or two stops and rigid block under periodic excitation was considered, 12 and the stability condition and bifurcation mechanism were investigated. A sinusoidally driven oscillator with linear stiffness and impacts at rigid stops was studied by S Foale, 13 and the analytical results revealed the transition mechanism of grazing bifurcation and codimension-two bifurcation. Hogan 14 provided an impact model where a rigid block lied on a horizontal surface between two symmetrically placed walls and found the symmetry-breaking and period-doubling bifurcations. Periodic motions of the impact oscillator were also studied by analytical methods, and the stability condition of different periodic motions was investigated. 15 U Andreaus et al. 16 considered a soft impact bilinear oscillator and obtained bifurcation diagrams, Lyapunov coefficients, return maps, and phase portraits of the response. Peterka 17 also studied the dynamics of oscillators with soft impacts by bifurcation diagrams, time series, phase trajectories, and Poincare maps of periodic and chaotic impact motions. JP Chávez et al. 18 presented a bifurcation analysis of two periodically forced Duffing oscillators coupled via soft impact. Li et al. 19 computed the spectra of Lyapunov exponents for periodic motions and chaos and calculated the largest Lyapunov exponents in a large parameter range in a two-degree-of-freedom vibro-impact system. The calculation of the spectrum of Lyapunov exponents for impact-vibrating systems with rigid constraints was given in detail by Jin et al. 20 Yue and Xie 21 developed a method of calculating the Lyapunov exponents in vibro-impact systems with symmetric rigid constraints. Moreover, other scholars22–41 studied different impact oscillators and found some typical different phenomena.
It is important to analyze the dynamics of the impact oscillator in detail, so as to enlarge the profitable effects including optimum parameter design and high reliability, and minimize the adverse effects such as high noise levels, fatigue damage, and unstability. In this article, a simple but typical impact oscillator is established at first, where the oscillator impacts at one stop and is shocked with impulse excitation at the other stop instantaneously in section “Mathematical model.” This oscillator could model many mechanical systems, such as drilling jumbo, vibrating hammer, and pile driver. The existence condition for periodic motion and its properties are analyzed in sections “Dynamical analysis” and “Properties of periodic-1 motion,” respectively. Then, section “Parameter analysis” presents the detailed analysis of system parameters on dynamical response. Finally, the obtained conclusions are summarized.
Mathematical model
The considered SDOF mechanical model is shown in Figure 1. In the model, the mass m is
connected to supporting face through a linear spring with stiffness coefficient as
k. When its displacement is

An SDOF impact oscillator with impulse excitation.
The differential motion equation of the oscillator is
where m, k, e1, e2,
Dynamical analysis
Period-1 motion
When
Obviously, equation (1) has the solution as

where
The motion from Stop B to Stop A is considered
first. The initial conditions are

Substituting equation (3) into equation (2), it will yield


Supposing

Substituting these two conditions into equation (4), it yields


Combining equations (5) and (6), one could get

It could be found that different

so that
2. Then, the motion from Stop A to Stop B is
studied. The initial conditions are


In consideration of periodic impact vibration, the boundary conditions


As the similar procedure, one can obtain

Substituting equation (7) into equation (13), it will yield

According to equations (8) and (14), the existing conditions for period-1 motion of impact vibration system could be established as follows:
When λ = 1, that is, shock gap is the same as impact gap, the
condition is
If λ > 1, that is, shock gap is larger than impact gap, the
condition should be
When λ < 1, the conditions are
Figures 2–4 show the phase trajectories for λ = 1, λ > 1, and λ < 1, respectively. Obviously, they agree well with the above analysis.

The phase plane of (x, v) when λ = 1.

The phase plane of (x, v) when λ > 1.

The phase plane of (x, v) when λ < 1.
Other possible periodic motion
The period-1 impact motion is elucidated in the above analysis. In this subsection, other possible periodic motions, that is, period-n motions, will be investigated. Here, n denotes the number of shocks and impacts existing simultaneously in a vibration period.
Supposing the mass departures from Stop B with the initial velocity

Similarly, the oscillator return to the stop B after two shocks, one could obtain

Under the condition of period-2 motion, that is,

It is obvious that the solution of period-2 motion is the same as that of period-1 motion. That means there is no single period-2 motion in the oscillator. Using the mathematical induction, period-n motion can also be derived as

Accordingly, only period-1 motion shown in section “Period-1 motion” exists in the oscillator if impact and shock exist simultaneously.
Properties of periodic-1 motion
Poincare map and stability analysis
Based on the mathematical model, one could establish the iterative relationship between the velocity of n + 1 impact and that of n impact

Equation (18) could be rewritten as

In order to determine the stability of equilibrium in equation (19), that is, period-1 motion, one should apply Taylor expansion to equation (19) at the equilibrium and obtain

By analyzing the values of

Substituting

Obviously, there will be three cases for the stability of period-1 motion:
When λ < 1, one could obtain
The case λ > 1 will make
The critical case
Possibility of multiple periodic motion
Between two consecutive shocks, the periodic motion of the system may exist in one of the following forms: (1) multiple impacts, (2) without impact, and (3) only one impact. Case 3 has been investigated in section “Dynamical analysis.” Then, we will study the possibility for other two possible periodic motions within a shock period.
Case 1 may occur only when λ > 1. If the oscillator cannot come back to Stop B after an impact within an excitation period, the impact will continue and the system energy will become less and less gradually. That means the oscillator will never arrive at stop B again, so that there is no periodic impact motion in this case.
Case 2 may occur only when λ < 1. Here, the oscillator is unable to reach Stop A initially within an excitation period, so that the impulsive excitation will continue constantly. If the system energy accumulates to a certain level, impact will appear. Then, the oscillator will vibrate as Case 1 or Case 3. Because Case 1 does not exist, it can only be in the form of Case 3.
Therefore, there is only one stationary period-1 motion within an excitation period.
Parameter analysis
Initial velocity
The effect of initial velocity
Assuming the actual initial velocity is

Thus, the velocity at Stop A is

The increment of system energy after n times of shocks in a cycle is

that is

From equation
(24), it is easy to find that the system energy will be increased when
λ < 1 and

Comparing

Based on comparison of equations (14) and (26), it could be
found
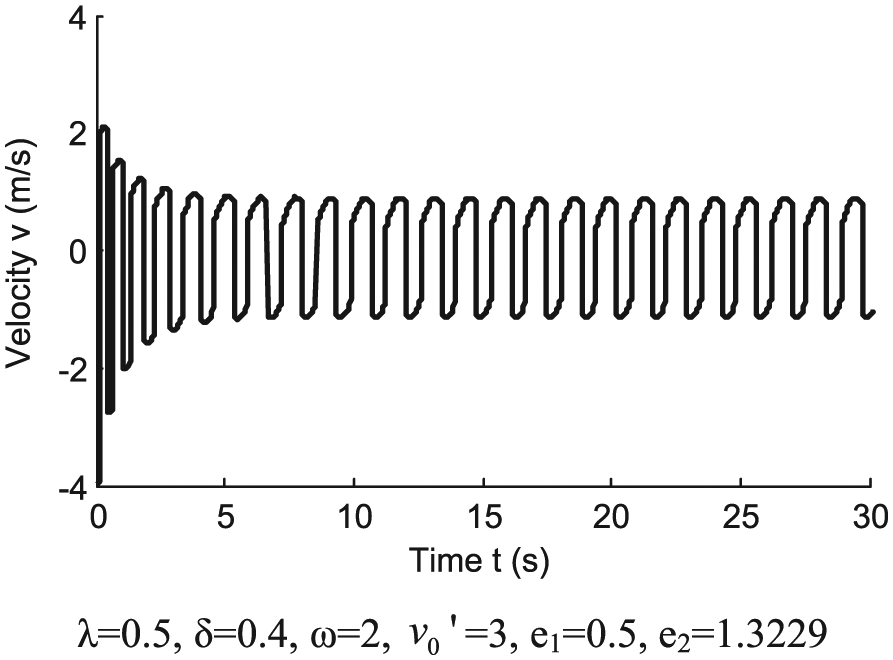
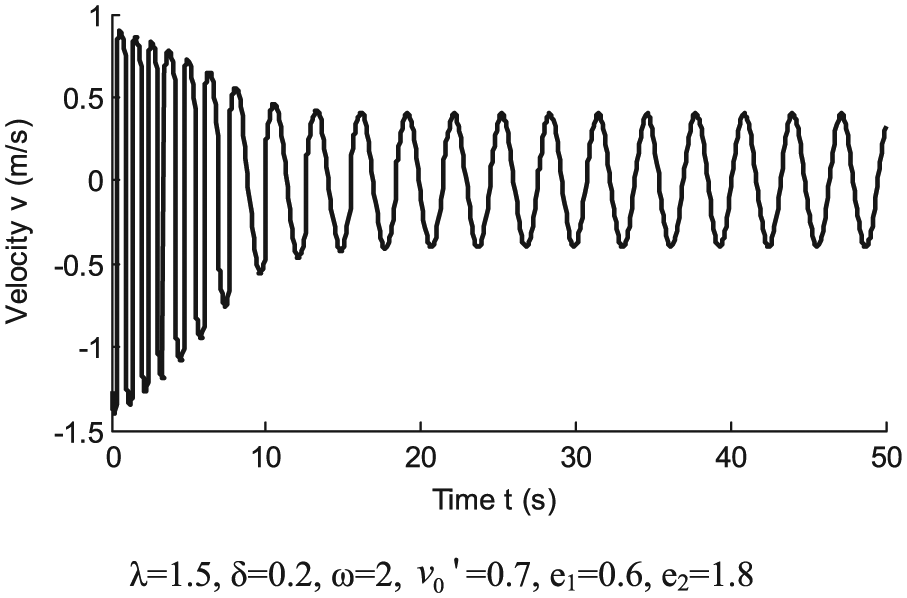
When λ < 1 and actual initial velocity is smaller
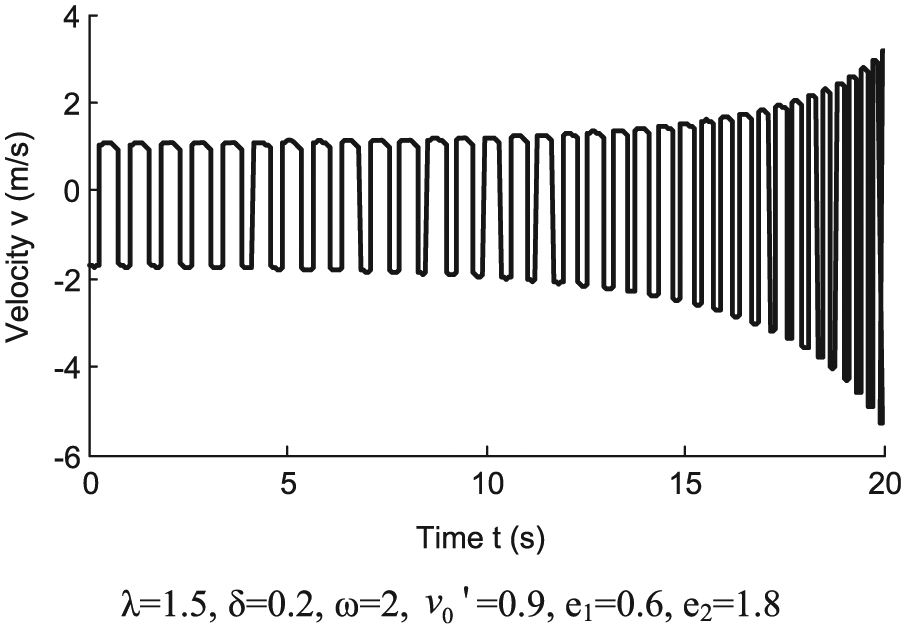
When λ > 1 and initial velocity is smaller
The time history of the velocity when λ < 1 and

The phase plane when λ < 1 and
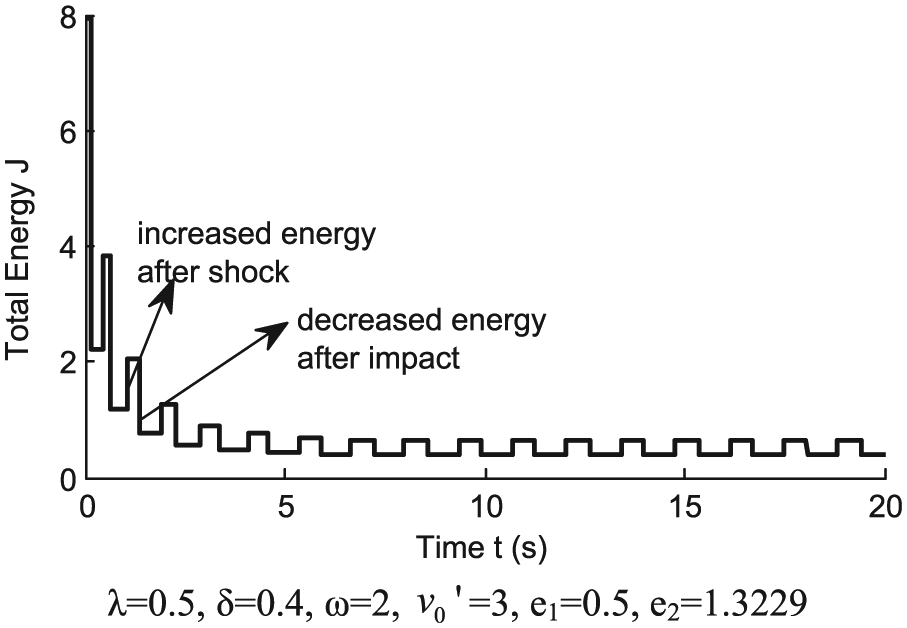
The time history of the energy when λ < 1 and
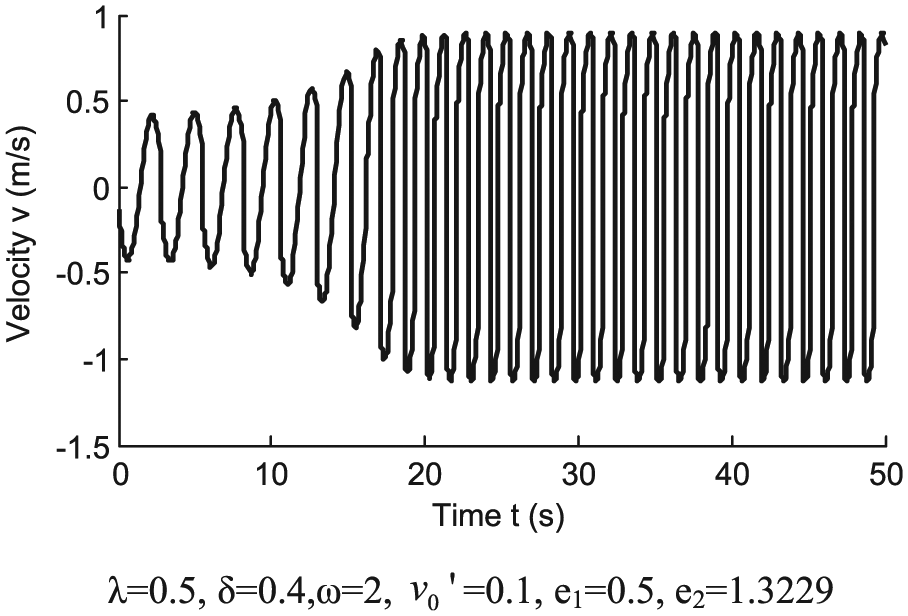
The time history of the velocity when λ < 1 and

The phase plane when λ < 1 and

The time history of the energy when λ < 1 and
The time history of the velocity when λ > 1 and

The phase plane when λ > 1 and

The time history of the energy when λ > 1 and
The time history of the velocity when λ > 1 and

The time history of the energy when λ > 1 and
Furthermore, periodic motion can be obtained only when initial velocity is exactly equal to the condition of periodic solution in theory if λ > 1. In the actual situation, such periodic motion is difficult to be obtained, and the system is quite sensitive to small variations in initial conditions and system parameters. If the initial velocity changes slightly during actual implementation, the system responses will be free oscillation or unstable motion. Therefore, parameter condition λ > 1 should not be taken into account during actual system design.
Shock energy
According to energy equation and initial conditions, that is,

It could be found that shock energy of periodic motion depends on initial velocity, and it will become larger with the increase in initial velocity or e2. Our purpose is to analyze the shock energy of the periodic motion. Therefore, substituting the condition of periodic solution into the equation of shock energy, one could obtain

According to the above analysis, the condition for periodic motion is
It can also be seen that shock energy is influenced by k, e1,
and
Vibration frequency
For simplicity, the vibration frequency from Stop B to Stop
A is denoted by
According to the boundary condition

The initial velocity can be expressed as

When λ > 1, the existing condition for periodic motion is

If λ < 1, the existing conditions for periodic motion should be

2. Based on the boundary conditions

The initial velocity of Stop A to Stop B can be expressed as

When λ > 1, the existing conditions for periodic motion are

If λ < 1, the existing condition for periodic motion should be

From the above analysis, one could find the following results:
When λ > 1, vibration frequencies
If λ < 1, vibration frequencies
Therefore, small
In the following part, the special case, that is, λ = 0 is considered.
According to equation (27), one could obtain

Vibration period from Stop B to Stop A could be obtained

According to equation (30), it yields

Vibration period from Stop A to Stop B is

According to equations (33) and (34), vibration period can be written as

Substituting

λ = 0 is a special case of λ < 1, and it satisfies
the relationship between vibration period and natural frequency analyzed as above.
According to equation
(32), the relationship between
Conclusion
In this article, the existing and stability conditions of period-1 motion in an SDOF impact oscillator with impulse excitation are established. The possibilities of other periodic motions are also studied, and it is found that only period-1 motion exists for this oscillator. The effects of system parameters under different initial velocities are discussed in detail. Some important properties, such as shock energy and vibration frequency, are also analyzed. The results are important to design or control this kind of impact systems.
Footnotes
Academic Editor: Anand Thite
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are grateful to the support by National Natural Science Foundation of China (No. 11372198), the Cultivation plan for Innovation team and leading talent in Colleges and universities of Hebei Province (LJRC018), the Program for advanced talent in the universities of Hebei Province (GCC2014053), and the Program for advanced talent in Hebei Province (A201401001).