In this article, numerical simulation of fuzzy differential equations using general linear method is proposed. The significance of general linear method is derivation of algebraic order conditions of method using technique of rooted trees and B-series. Fuzzy general linear method of order 3 based on the concept of generalized Hukuhara differentiability for solving fuzzy differential equations is developed. Convergence of third-order fuzzy general linear method is proven. The proposed method is tested on fuzzy initial value problems, and the numerical results showed that fuzzy general linear method produced more accurate approximation of fuzzy solution for tested problems compared with the existing fuzzy numerical methods.
The study of fuzzy differential equations (FDEs) has been interested by many researchers in recent years. FDEs are known as an ideal mathematical modeling of real-world problems whereby uncertainties and randomness exist. Early approaches in FDEs modeling were Hukuhara derivative and differential inclusions. However, they displayed the disadvantage of having fuzzier solutions using those type of differentiability.1 Then, generalized Hukuhara differentiability was defined by Bede et al.1–3 who use the extension of Hukuhara differentiability. The advantage of the generalized Hukuhara differentiability is having solutions of FDEs with decreasing uncertainty. In this work, we use the generalized Hukuhara differentiability given by Bede and Gal.2 A more comprehensive understanding of fuzzy theory and fuzzy logic can be found from Bede.1
The analytical solutions of FDEs are difficult to solve; hence, approximating the solutions of first-order linear FDEs using numerical methods has been investigated by many researches. For instance, Ma et al.4 and Abbasbandy and Viranloo5 provided the solutions of FDEs using standard Euler method and Taylor method, respectively. Ghanaie and Moghadam6 and Abbasbandy and Viranloo7 suggested the numerical solutions of FDEs using Runge–Kutta method. Later, fuzzy improved Runge–Kutta method for numerical solution of first-order FDEs was introduced by Rabiei and Ismail.8 Rabiei et al.9 constructed the fuzzy improved Runge–Kutta Nyström method for direct solution of second-order FDEs. Ghazanfari and Shakerami10 proposed the numerical solution of FDEs using Runge–Kutta-like method. Moreover, artificial neural network (ANN) method by Effati and Pakdaman,11 trapezoidal and midpoint methods by Ivaz et al.,12 and reproducing kernel Hilbert space method by Abu Arqub et al.13 were presented for solving FDEs. Fuzzy fractional differential equation (FFDE) was proposed by Salahshour et al.,14,15 and Ahmadian et al.16 derived the Tau method for solving fuzzy fractional kinetic model.
In Bede,17 characterization theorem was introduced to obtain the solution of FDEs by converting them into a system of ordinary differential equations (ODEs). The advantage of this technique is that any numerical method is applicable to solve FDEs. Bede’s characterization theorem was then extended into generalized characterization theorem given by Nieto et al.18 under generalized differentiability where the FDEs were translated into the two systems of ODEs. It is found that the FDEs appear in many applications. Several examples include modeling of earthquake engineering vibration problems where the parameters of the ground acceleration have a fuzzy credibilistic nature, and as a result, instead of using classical probabilistic methods, the fuzzy approach is considered to develop the seismic response spectrum.19 Besides this, the dynamic beam equation of heat-type equation which inherits uncertainty is represented by the FDEs.20 The HIV infection is also modeled as fuzzy boundary value problems to minimize the viral load and drug costs.21
General linear method (GLM) was constructed by Butcher22–24 for numerical solution of first-order ODEs. This method is a linear combination of Runge–Kutta method and multistep method. He used the theory of B-series and different order of rooted trees to construct the algebraic order conditions of GLM. In this article, we considered the GLM as a method with enhancements such as high accuracy.
The first aim of this article is to study the derivation of GLM based on the technique of B-series and rooted trees and obtain the related algebraic order conditions of GLM up to order 4. Then, using the obtained order conditions, we will derive a new set of GLM of order 3. Next and main aim of this research is derivation of fuzzy version of proposed third-order GLM based on the concept of generalized Hukuhara differentiability given by Bede and Gal2 for solving FDEs. The convergence of third-order fuzzy GLM will be proved through the two lemmas and a theorem.
In section “Preliminaries,” basic definitions and theorems on fuzzy sets are provided. In section “GLM,” we present the concept and derivation of the GLM. Section “Third-order fuzzy GLM” contains the fuzzification of GLM for numerical solution of FDEs. Numerical results of GLM compared with the existing numerical methods are provided in section “Numerical results,” and discussion is given in section “Comparison and discussion.” Conclusion is discussed in section “Conclusion.”
Preliminaries
In this section, we present some definitions and notation in the fuzzy settings that will be used in this article.
Definition 1
Let be a nonempty set. A fuzzy set in is characterized by its membership function :1
is normal, there exists such that ;
is a convex fuzzy set, for all and , ;
is upper semicontinuous on ;
is compact, where denotes the closure of a subset.
Then, is called the space of fuzzy numbers.
Definition 2
The r-level set of a fuzzy number , , denoted by is defined as1
It is concluded that the r-level set of a fuzzy number is a closed and bounded interval , where is the lower bound of and indicates the upper bound of .
Definition 3
The distance between two fuzzy intervals is defined as1
is the Hausdorff distance between and .
Then, it is said that is a metric in , and the following properties hold:
;
;
;
is a complete metric space.
Definition 4
A function is a fuzzy function if for any fixed arbitrary and , such that exists, then f is a continuous function.1
Definition 5
Let .1 If there exists such that , then is called the Hukuhara difference (H-difference) of and , and it is denoted by (note that ).
Definition 6
Let and . 2 is said to be strongly generalized Hukuhara differentiable at if there exists an element , such that
1. For all sufficiently small, and the limits (in the metric )
is known as the differentiability on ;
2. For all sufficiently small, and the limits
is known as the differentiability on ;
3. For all sufficiently small, and the limits
4. For all sufficiently small, and the limits
Theorem 1
Let and with and both differentiable at .1,22 Then
where is a continuous fuzzy mapping and and is a positive number or infinity.
Suppose we have , and
From Theorem 1, if is differentiable, then equation (1) transfers into the following system of ODEs
If is differentiable, then equation (1) transfers into the following system of ODEs
General linear method
Consider the first-order initial value problem of ODE given by
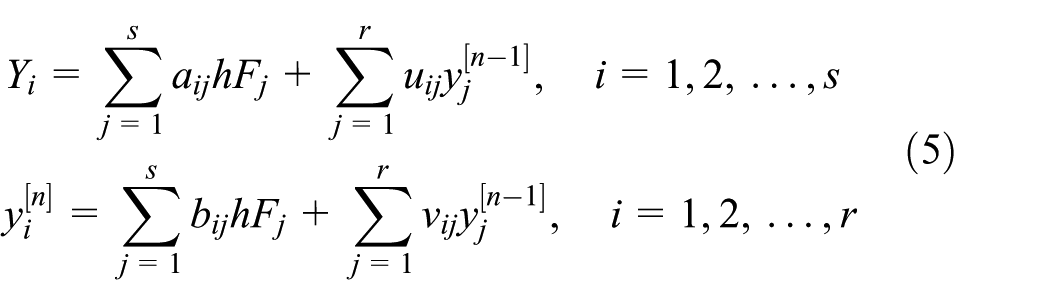
The general formulae for GLM introduced by Butcher22,23 is given by
The output approximations from step number is denoted by , , the stage values by , and the stage derivatives by . Simply we could write as below
In this section, we derive the new set of coefficients of third-order GLM for numerical solution of first-order ODEs given in equation (4). Then, in the next section, we will develop the fuzzy extension of derived third-order GLM for solving fuzzy initial value problems. Coefficients of GLM using Butcher’s tableau is given in Table 1.
Matrix representation of coefficients of GLM.
To further understand the derivation of GLM, a brief introduction on the concept of “rooted trees” is needed. They act as a tool to aid the extraction of order conditions which are required to derive GLM. Rooted trees is defined by Butcher.24 In this article, we use trees of order 1–4 which are given in Table 2. In addition, we need to mention that the rooted trees are closely associated with the composition law. The composition law plays an important role in construction of various numerical methods such as Runge–Kutta methods, GLM, Rosenbrock methods, multi-derivative methods, and so on.25 This law permits the derivation of algebraic order conditions in a convenient way avoiding the traditional tedious calculations of Taylor series expansion.
General coefficients of fourth-order GLM.
Definition 8
Let by a mapping, then the form of a formal series given as follows22,24
is called the B-series, where denoting the set of rooted trees together with an additional empty tree , and ( is the product over all vertices of the order subtree rooted at that vertex), is the order of tree, is the symmetry of tree, is the factorial of tree, and is the elementary differential. To derive the order conditions for GLM, we need to satisfy the theorem below.
Theorem 2
The GLM has order if there exists and such that for every tree satisfying 22
From theorem 2, represents the stages of method, while is the output approximations computed after a time step. The coefficients of GLM of order 3 with and are given in Table 2.
Here, to derive the order conditions of GLM using equations (8a) and (8b), the values of and for are used as given in Table 3.
Values of and for .
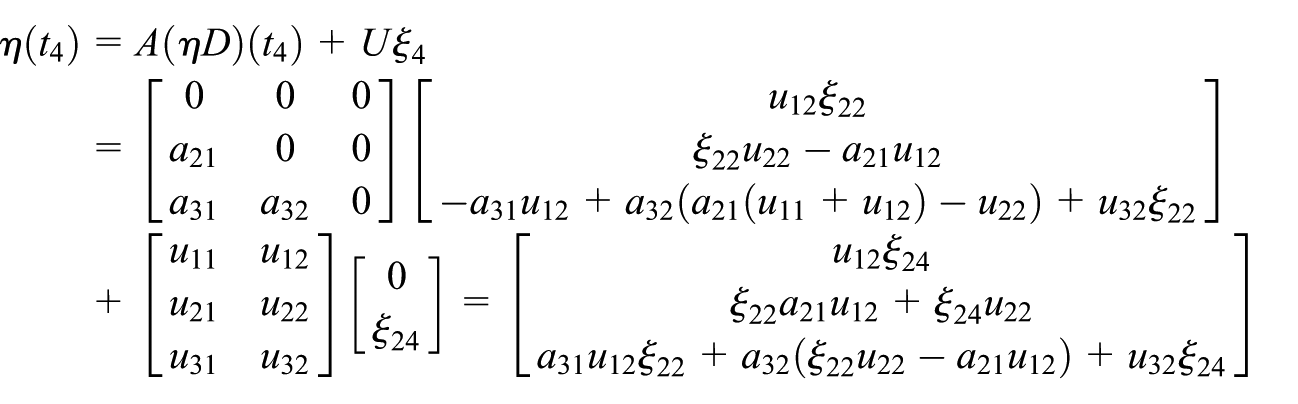
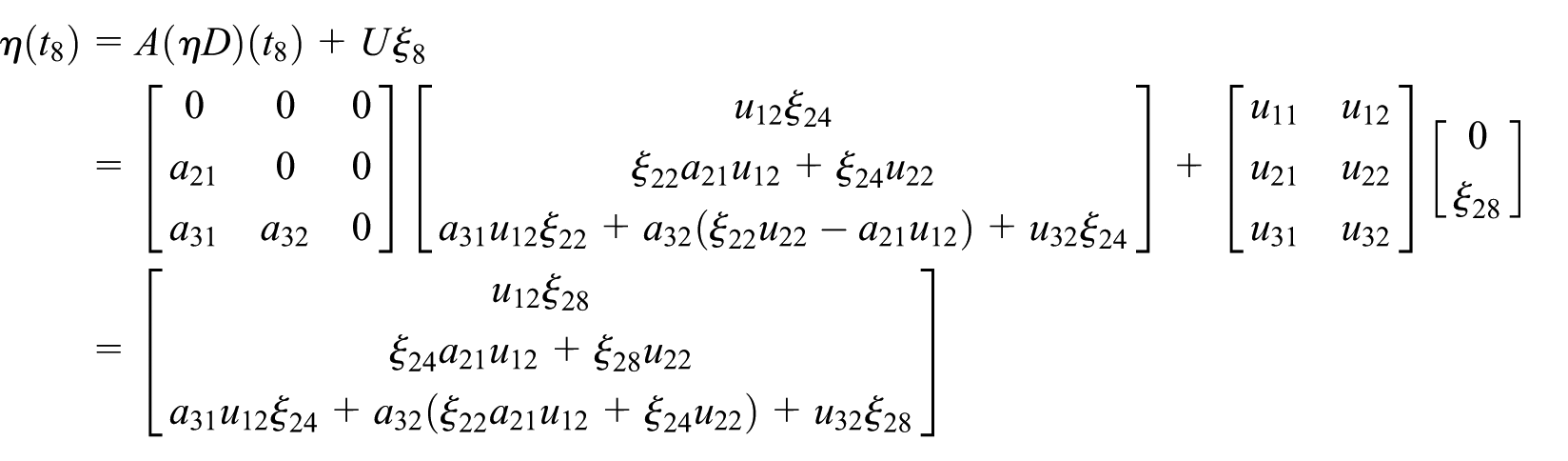
Using formulae of GLM given in equation (8a), the values of for are calculated as follows:
For
For
For
For
For
For
For
For
For
Consequently, by substituting the obtained values of into equation (8b), the values of for are given as follows:
For
For
For
For
For
For
For
For
For
The order conditions for trees up to order 4 are given in Table 4.
Order conditions of GLM up to order 3.
Tree
Order conditions of GLM with order 3
GLM: general linear method.
Using the order conditions given in Table 4, for and minimizing the error norm of GLM of order 4 (for trees ), the GLM of order 3 is derived. In this way, we set the values and and substitute the values of and given in Table 3. The coefficients of three stages of third-order GLM is shown in Table 5. The calculation of various quantities assigned to obtain the method can be found in Table 6.
Coefficients set of third-order GLM.
Calculation of order for GLM.
t
t1
0
−1
0
1
1
1
1
1
0
t2
0
0
0
1
0
t3
0
0
0
1
0
t4
0
0
0
0
t5
0
0
0
1
0
t6
0
0
0
0
t7
0
0
0
0
t8
0
0
0
0
Third-order fuzzy GLM
We consider the fuzzy problem 1 where is a continuous mapping from to and with r-level sets
The set of interval is a set of equally spaced grid points . The exact solutions which
is approximated by
The grid points are for where . Then, the exact and approximate solutions are denoted by
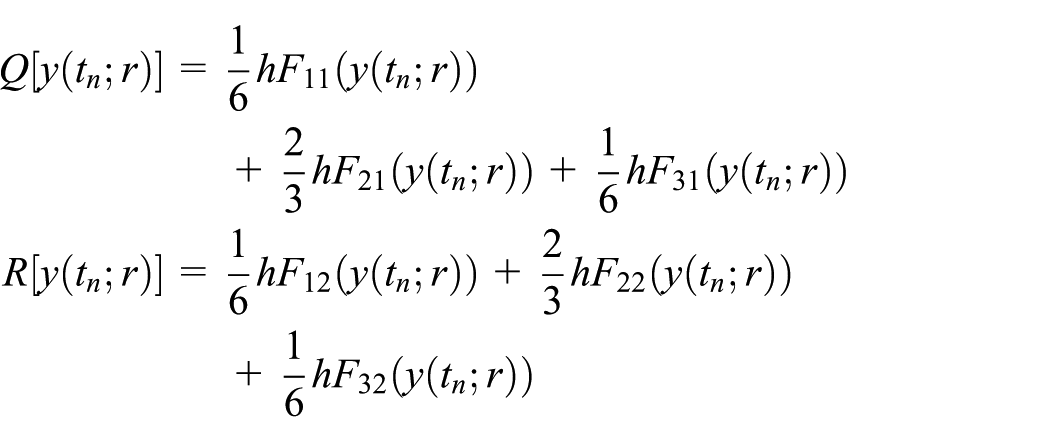
Based on equation (5), the fuzzy GLM of order 3 is given by
where for type (i) differentiability is arranged as
while for type (ii) differentiability is arranged as
and
Consequence of theorem 1 in section “Introduction” leads to the conversion of fuzzy initial value problem into two parametric ordinary differential systems which consist of type (i) and type (ii) differentiabilities. Proof of this theorem was found in Nieto et al.18 In this section, fuzzy GLM is developed for type (i) differentiability based on formulation (2) in definition 7. Meanwhile, fuzzy GLM for type (ii) differentiability is referred by formulation (3) in definition 7.
Convergence analysis
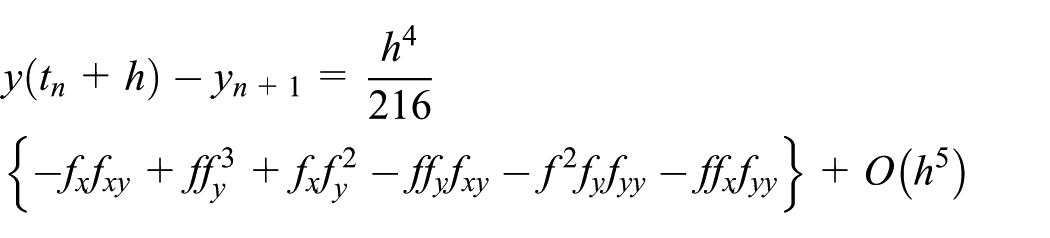
The local truncation error of third-order GLM using the Taylor series expansion related to the given coefficients in Table 5 is presented by
for some given positive constants and and denote , . Then
Theorem 3
Let and are in and let the partial derivative of and be bounded over , then for arbitrary fixed , the approximate solution of equation (14) converge to the exact solutions and uniformly in .10
For and is a bound for partial derivatives of and . Thus, by lemma 2
where . In particular
since , we obtain
and if , we get which completes the proof.
Numerical results
To show the efficiency of derived third-order fuzzy GLM, the method is numerically tested on three test problems. All problems are tested based on type (i) differentiability using formulation (15) in section “Third-order fuzzy GLM.” The accuracy of the method in terms of global error is estimated by the expressions and . The numerical results are compared with existing Euler method,18 Runge–Kutta method of order 4,6 trapezoidal method (TM),12 and ANN method.11 Below is the list of notation used in the tabulated results:
If is differentiable, then the exact solution is given as
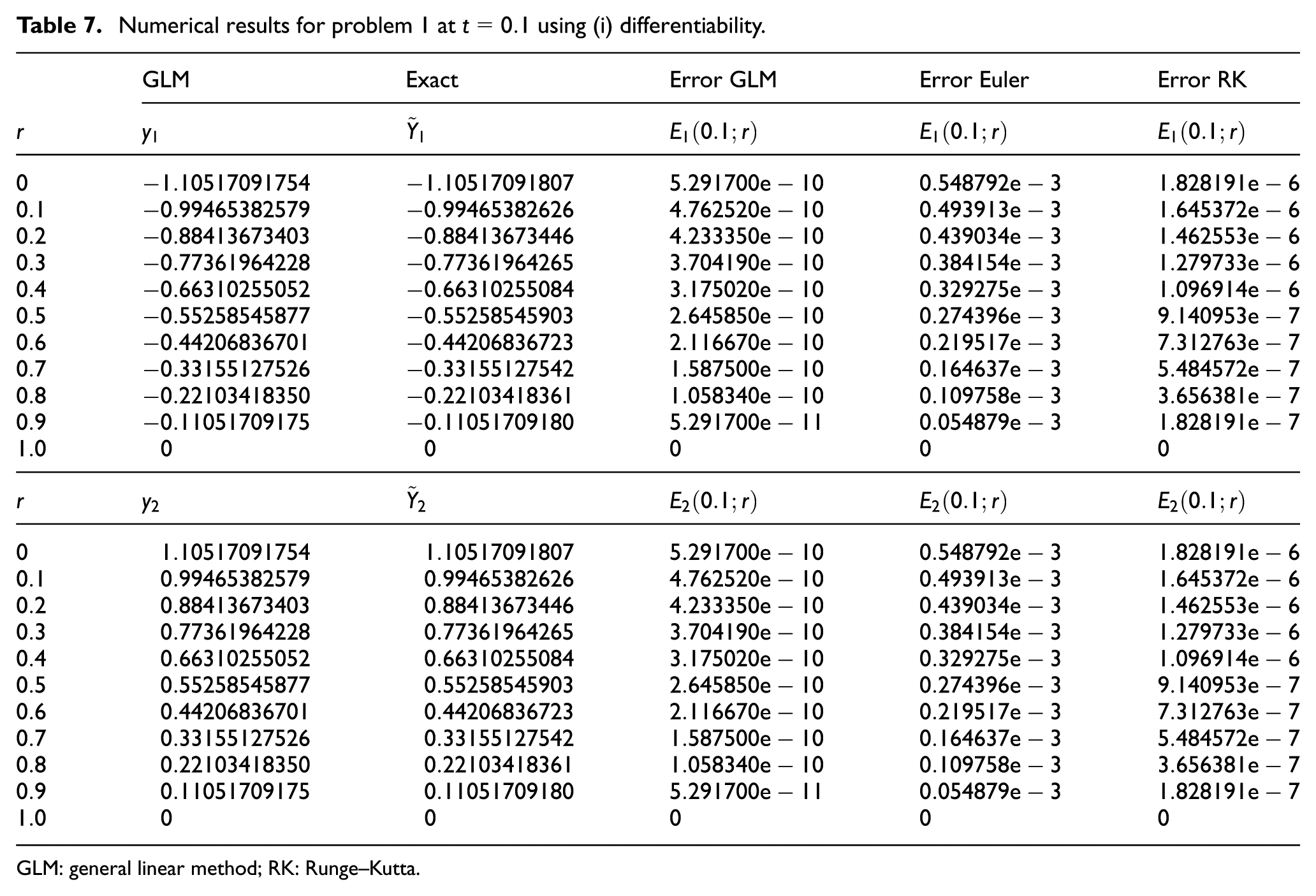
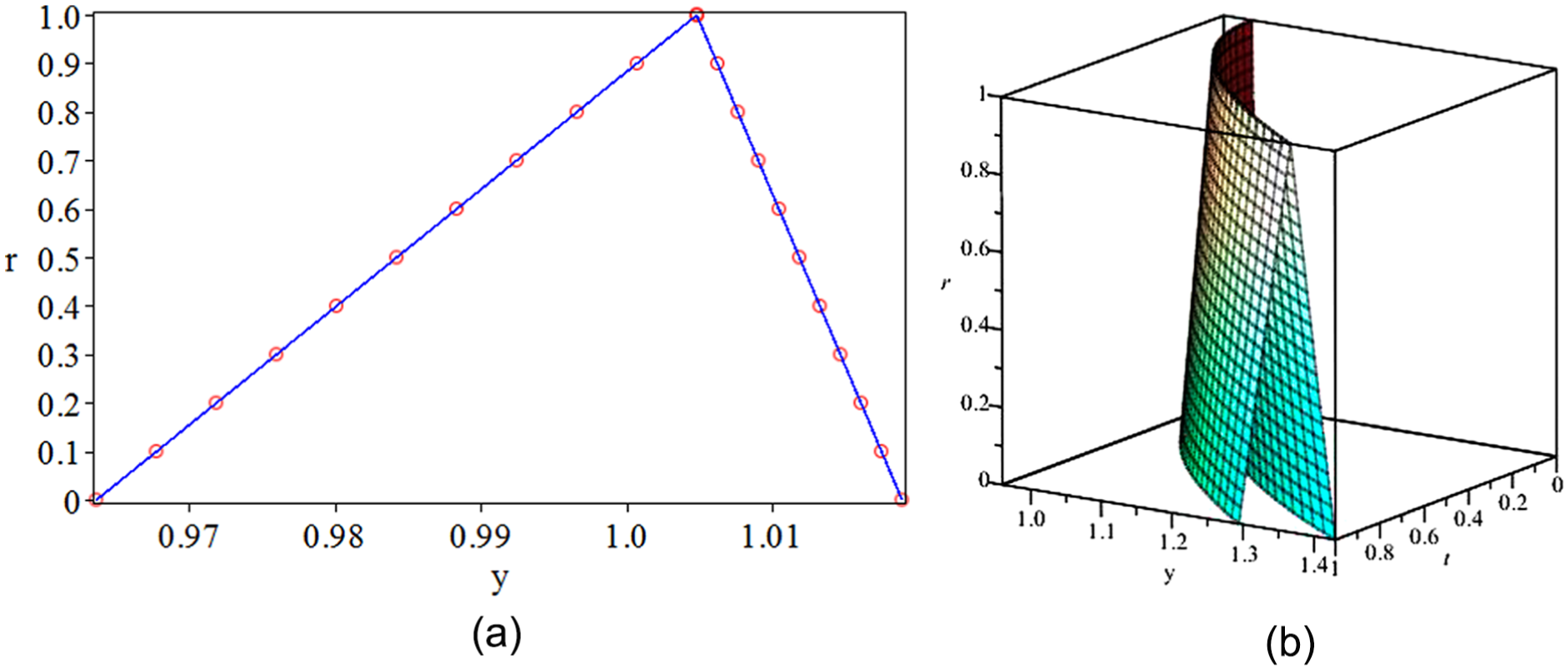
Based on formulation (2), the approximated solutions using third-order GLM at and subintervals are compared with Euler method and Runge–Kutta method and are shown in Table 7. Figure 1 shows the plotted graph of GLM with the exact solution.
Numerical results for problem 1 at using (i) differentiability.
GLM
Exact
Error GLM
Error Euler
Error RK
GLM: general linear method; RK: Runge–Kutta.
(a) Exact (solid line) and GLM (circle) points at using (i) differentiability and (b) 3D plot for problem 1.
Problem 2
Use the initial values in problem 1, let , ,12 and . The exact solution is given by
The graphs of exact solutions and approximated solutions and three-dimensional (3D) plot for problem 2 are shown in Figure 2. Table 8 shows that the numerical solutions of GLM are compared with the TM.
(a) Exact (solid line) and GLM (circle) points at and (b) 3D plot for problem 2.
Numerical results for problem 2 at .
GLM
TM
Exact
Error GLM
Error TM
GLM: general linear method; TM: trapezoidal method.
We compared the GLM with the TM and ANN method at , , and the results are given in Table 9. Figure 1 shows the plotted graph of GLM with the exact solution and 3D plot for problem 3.
Numerical results for problem 3 at .
GLM
Exact
Error GLM
Error TM
Error ANN
.
GLM: general linear method; ANN: artificial neural network.
Comparison and discussion
From problem 1, the results given in Table 7 showed that the GLM with error performed higher accuracy than the Euler method with error of and Runge–Kutta method with error . Graph comparison between approximated solutions by GLM and exact solutions can be seen in Figure 1. In problem 2, the numerical result of GLM is compared with the TM as shown in Table 8, and it is obvious that GLM produced error of , while its error is slightly smaller than error obtained by TM. In Figure 2, the graph indicates that the approximated solutions of GLM are close to the exact solutions. In problem 3, from Table 9, it can be seen that GLM by achieving the error accuracy of is the most accurate method with the smaller error compared to the ANN with the error of and TM with the error of . The graphical representation of approximated solutions and exact solutions is shown in Figure 3. The 3D plots of solution for three tested problems are shown.
(a) Exact (solid line) and GLM (circle) points at and (b) 3D plot for problem 3.
Conclusion
In conclusion, in this article, GLM of order 3 based on the rooted trees and B-series is developed. The rooted trees act as a powerful tool in extracting the order conditions of a method. We had given out the order conditions as well as a new set of coefficients of GLM. Then, we constructed the fuzzy GLM using the concept of generalized Hukuhara differentiability. The new method applied with the derived coefficients of GLM of order 3 into the fuzzy differential test problems. The numerical results compared with the existing numerical methods showed that the fuzzy GLM is an efficient method for solving FDEs.
Footnotes
Acknowledgements
The authors are grateful to Professor John C. Butcher from the University of Auckland for all the profitable discussions had during these years concerning the general linear method with B-series and rooted trees.
Academic Editor: Yangmin Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article is financed by using Fundamental Research Grant (FRGS) with Vot number 5524852 from Ministry of Higher Education Malaysia at Institute for Mathematical Research, Universiti Putra Malaysia.
References
1.
BedeB. Mathematics of fuzzy sets and fuzzy logic. Berlin: Springer, 2013.
2.
BedeBGalS. Generalizations of the differentiability of fuzzy-number-valued functions with applications to fuzzy differential equations. Fuzzy Set Syst2005; 151: 581–599.
3.
BedeBStefaniniL. Generalized differentiability of fuzzy-valued functions. Fuzzy Set Syst2013; 230: 119–141.
4.
MaMFriedmanMKandelA. Numerical solutions of fuzzy differential equations. Fuzzy Set Syst1999; 105: 133–138.
5.
AbbasbandySViranlooTA. Numerical solution of fuzzy differential equations by Taylor method. Comput Meth Appl Math2002; 2: 113–124.
6.
GhanaieZAMoghadamMM. Solving fuzzy differential equations by Runge-Kutta method. Math Comput Sci2011; 2: 208–221.
7.
AbbasbandySViranlooTA. Numerical solution of fuzzy differential equation by Runge-Kutta method. Nonlinear Stud2004; 11: 117–129.
8.
RabieiFIsmailF. Numerical solution of fuzzy differential equation using improved Runge-Kutta method. GSTF J Mat Stat Oper Res2014; 2: 78–83.
9.
RabieiFIsmailFAhmadianAet al. Numerical solution of second-order fuzzy differential equation using improved Runge-Kutta Nystrom method. Math Probl Eng2013; 2013: 803462.
10.
GhazanfariBShakeramiA. Numerical solutions of fuzzy differential equations by extended Runge–Kutta-like formulae of order 4. Fuzzy Set Syst2011; 189: 74–97.
IvazKKhastanANietoJJ. A numerical method for fuzzy differential equations and hybrid fuzzy differential equations. Abstr Appl Anal2013; 2013: 735128.
13.
Abu ArqubOAl-SmadiMMomaniSet al. Numerical solutions of fuzzy differential equations using reproducing kernel Hilbert space method. Soft Comput2015; 20: 3283–3302.
14.
SalahshourAAhmadianASenuNet al. On analytical solutions of the fractional differential equation with uncertainty: application to the Basset problem. Entropy2015; 17: 885–902.
15.
SalahshourAAhmadianAIsmailFet al. A new fractional derivative for differential equation of fractional order under interval uncertainty. Adv Mech Eng2015; 7: 1–11.
16.
AhmadianASalahshourSBaleanuDet al. Tau method for the numerical solution of a fuzzy fractional kinetic model and its application to the oil palm frond as a promising source of xylose. J Comput Phy2015; 294: 562–584.
17.
BedeB. Note on “Numerical solutions of fuzzy differential equations by predictor–corrector method.” Inform Sci2008; 178: 1917–1922.
18.
NietoJJKhastanAIvazK. Numerical solution of fuzzy differential equations under generalized differentiability. Nonlinear Anal: Hybrid Syst2009; 3: 700–707.
19.
MaranoGCMorroneESgobbaSet al. A fuzzy random approach of stochastic seismic response spectrum analysis. Eng Struct2010; 32: 3879–3887.
20.
TapaswiniSChakravertyS. Dynamic response of imprecisely defined beam subject to various loads using Adomian decomposition method. Appl Soft Comput2014; 24: 249–263.
21.
GasilovNAAmrahovSEFatullayevAGet al. Solution method for a boundary value problem with fuzzy forcing function. Inform Sci2015; 317: 349–368.
22.
ButcherJC. General linear methods. Acta Numerica2006; 15: 157–256.
23.
ButcherJC. General linear methods for ordinary differential equations. Math Comput Simulat2009; 79: 1834–1845.
24.
ButcherJC. Numerical methods for ordinary differential equations. 2nd ed.Hoboken, NJ: John Wiley & Sons, 2008.
25.
ChartierPHairerEVilmartG. Algebraic structures of B-series. Found Comput Math2010; 10: 407–427.