
Abstract
Hydropower rotors and pumps have the specificity to be oriented vertically, meaning that the bearing forces have to be evaluated at each time-step depending on the position of the rotor for dynamical analyses. If the bearing forces cannot be evaluated analytically, a suitable numerical method should be used to calculate the pressure distribution over the bearing domain. This process can be computationally expensive as it should be performed for each discrete time-step. As a result, a comparison between the spectral method, the finite difference method, and the finite element method is performed to investigate which method is more adapted to dynamical analysis of the bearing. It is observed that the spectral method has the advantage of having a reasonable simulation time for any eccentricity magnitude with a moderate number of interpolation points. However, this method should be restricted to simple bearing models such as plain bearings or multilobe bearings due to the advantage of finding a global numerical solution directly on the entire bearing/pad domain.
Introduction
In horizontal turbomachines, the stiffness and damping properties of the bearings are calculated around a stationary position due to dead weight. On the contrary, vertical machines such as pumps and water turbines do not operate around a static equilibrium position but wobbles around the geometric center of the bearing due to unbalance forces. As a result, the bearing forces have to be calculated by solving the Reynolds equation at each time-step. Since rotordynamical simulations are usually performed for more than a hundred revolutions to reach steady state or for analyses of run-ups and shut-downs, there is a need to reduce the computational time in order to evaluate the system dynamics as function of design parameters such as oil viscosity, bearing type, or unbalance load in the case of vertical machines. As few complete rotordynamic codes are available on the market, it is important to develop functions to evaluate dynamical properties of bearings and rotors that could be of use for stand-alone computers in order to obtain a reasonable computational time.
Reynolds equation can be solved using different numerical methods. The oldest and most common way is to use the finite difference method (FDM). Cardinali et al. 1 used this method in a 160-MW Francis type hydro-unit to describe the nonlinear force model of tilting-pad bearing models. Another way to solve the Reynolds equation is to use the finite element method (FEM). Ma and Zhang 2 adopted this method to evaluate the nonlinear oil film forces of the tilting-pad guide bearing in order to simulate the dynamics of a hydro-unit supported by a generator and a turbine guide bearing. The main concern with FDM and FEM is the computational cost required to obtain accurate results. An alternative choice to these two methods is the spectral method described by Boyd 3 and Trefethen. 4 The spectral method is widely used in fluid dynamics, but its use to solve Reynolds equation in bearings has been limited to the work of Raad and Karageorghis 5 and Gantasala et al. 6 Fundamentally, the FEM and spectral method are based on the same assumption: the solution of the differential equation is approximated by a set of trial functions satisfying the boundary conditions, and the residuals are minimized to obtain a solution. In the FEM case, the domain is split in smaller elements where the solution is approximated by local low-order trial functions. On the contrary, the spectral method uses global higher order trial functions to approximate the solution over the entire computational domain. The advantage of using the spectral method is the high accuracy of the solution due to the choice of global basis functions.
In this study, multilobe bearings with three and four lobes will be investigated since they are of common use in vertical machines. Transient simulations using multilobe bearings with different numerical schemes on rigid rotors have been widely investigated in the 1980s by Allaire et al. 7 and Li et al. 8 and more recently by Rao et al., 9 but not by using the spectral method. As a result, a comparison of the convergence of the FDM, FEM, and spectral method is performed with different mesh sizes. A focus will be made on the required computational time to perform one calculation of the fluid-film forces. Moreover, an application to a dynamic problem of a vertical machine will be qualitatively investigated. The numerical method used in this article can then be extended to other bearing types such as arc bearings or tilting-pad journal bearings.
Model description
Bearing modeling
The bearing used in this study is a three-lobe bearing with grooves. The geometry of the bearing is available in Figure 1 with the corresponding parameters in Table 1. The fluid-film pressure in the bearing is found from the solution of the Reynolds equation


Description of the multilobe bearing.
Geometric properties of the multilobe bearing.

where

where

By integrating along the circumferential and axial directions, the forces can be found in the fixed coordinate system using

Numerical methods
In this section, a short description of the three numerical methods used to solve the pressure distribution is available, with more details given for the spectral method since it is the numerical scheme of interest.
FDM
One of the simplest methods to solve the Reynolds equation is the FDM, which is based on a finite difference approximation of the derivatives. By applying it to equation (1), we obtain the following discrete form

The pressure can be found

where

with

represents the source term on the right side of Reynolds equation. Since there is no misalignment in the axial direction, one can notice that

where

The pressure distribution is iterated until a convergence condition is reached

The integration of the pressure distribution to find the bearing forces is done using the Simpson numerical integration.
FEM
In the FEM, the main concept is to split the domain in small elements where the solution is approximated by local low-order trial functions. Some details about this method applied to bearings can be found in Allaire et al.
11
as well as Booker and Huebner.
12
In our case, the fluid domain is discretized with 9-node quadrilateral elements to obtain the global matrices corresponding to the pressure fluidity component

and applying the appropriate boundary conditions.
Pseudo-spectral method
The idea of the spectral method is to assume the solution as a linear combination of orthogonal polynomials. The differential equation can be written in a simplified way

with the boundary condition

where

The solution of the differential equation will be a function


The collocation method is implemented where the residual is made equal to zero at specific points


Since there is

where
As the Chebyshev polynomials are used both in the circumferential and axial directions, the pressure is approximated with

Reynolds equation (1) can be written in a tensor form by substitution of the differentiation matrices as described in Trefethen 4
where

Results
Simulation procedure
Comparison study
To study the accuracy of the spectral method, the forces resulting from the pressure distribution will be compared with the FEM with quadrilateral elements and the FDM. The comparison is done for several mesh sizes, and the evaluation of the convergence is performed as well as the simulation time depending on the mesh size. An overview of the different types of mesh associated with each numerical method is available in Figure 2.

Example of mesh grids of size
Dynamic analysis
A dynamic analysis of an unbalanced rigid rotor set in the horizontal and vertical position is also performed. The model is very simplified since it corresponds to a rigid point mass moving in a bearing. However, this type of model is often used to evaluate the nonlinear dynamic behavior of rotors induced by the bearings using analytical methods for short bearings as in Adiletta et al. 13 or numerical methods in Meybodi et al. 14 Fundamentally, the way to include the bearing forces in a rigid rotor and a full turbine is similar. The main difference is that the rotor elastic equations have to be coupled with the Reynolds equation, as in De Castro et al. 15 and Jing et al. 16 who evaluated oil whirl and whip on a vertical rotor and continuous model, respectively.
Numerical comparison
The parameters of the bearings used for simulating Reynolds equation are given in Table 1. The eccentricities at which the calculation are performed correspond to a percentage of the bearing clearance
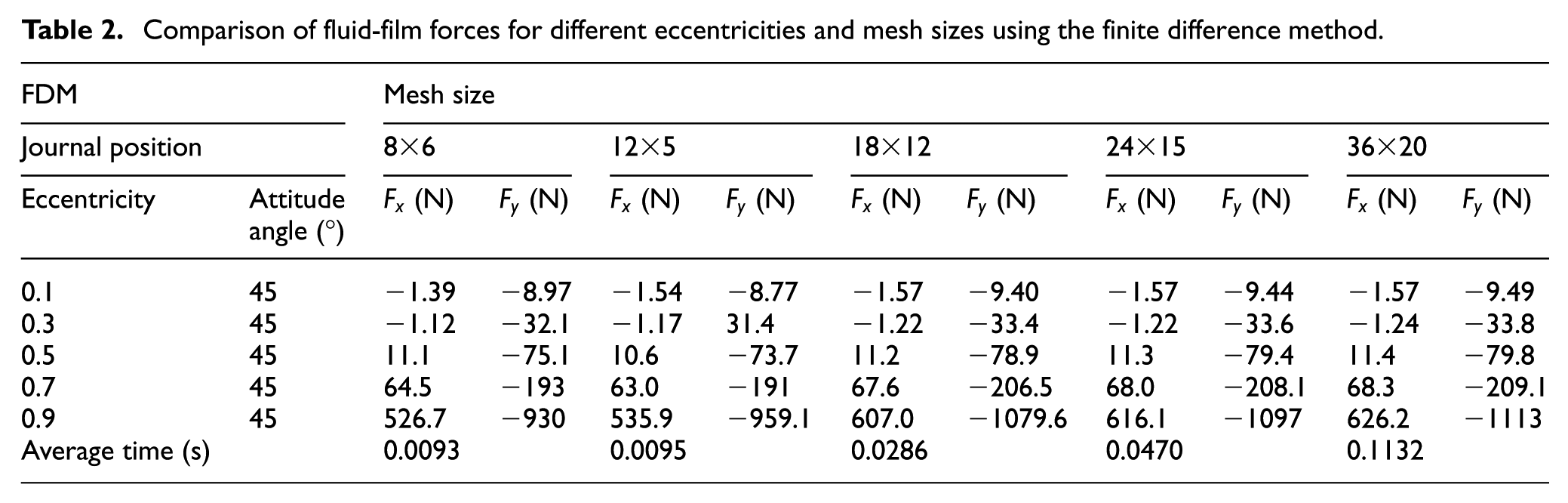
Comparison of fluid-film forces for different eccentricities and mesh sizes using the finite difference method.
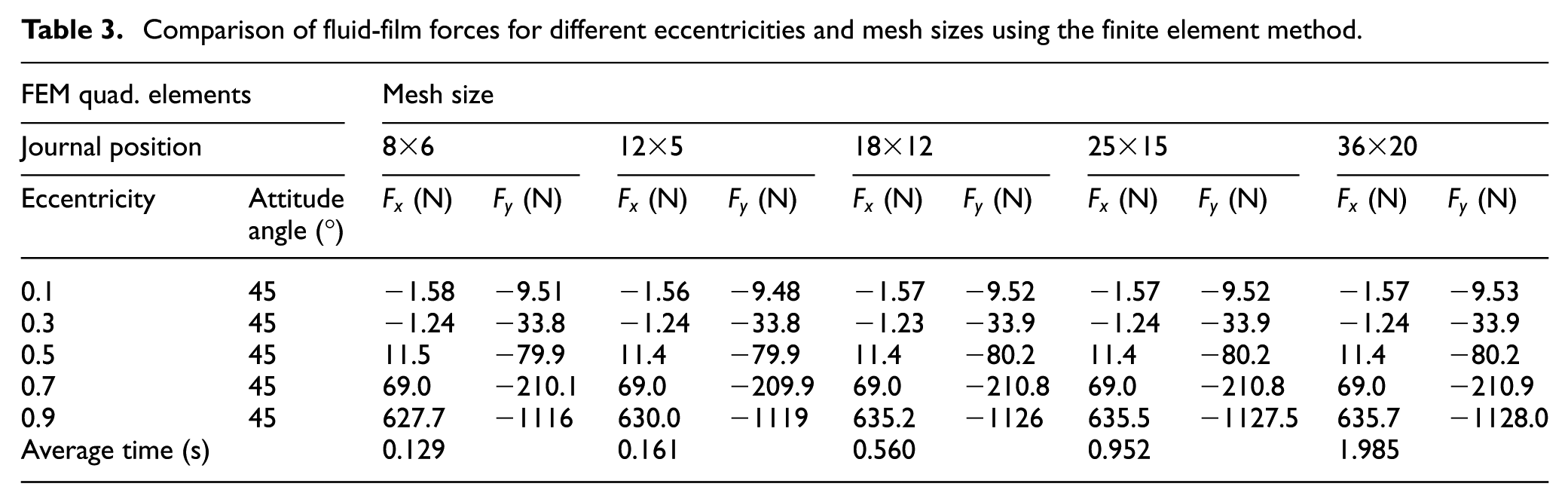
Comparison of fluid-film forces for different eccentricities and mesh sizes using the finite element method.
The simulation for FDM in Table 2 shows that the convergence is reached for a low number of nodes
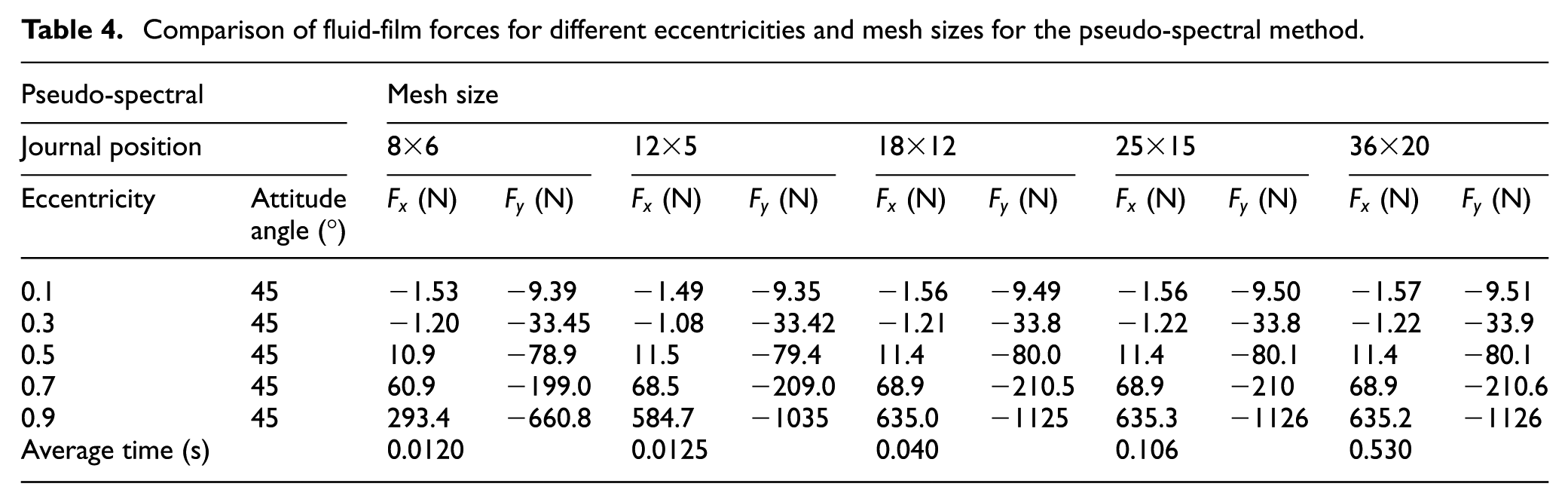
Comparison of fluid-film forces for different eccentricities and mesh sizes for the pseudo-spectral method.
As seen in Table 3, the FEM results show that the convergence of the force is obtained even for a low mesh size. Indeed, for a
As a result, the FDM is more appropriate for low eccentricities due to the fast calculation speed, but it is less useful for large eccentricities as the number of nodes has to be high to fully represent the pressure distribution, resulting in an increase of simulation time. As seen in Figure 3(a), the convergence time is always lower for FDM when compared with the same number of elements. However, the convergence for an eccentricity of 0.9 is not attained for a mesh size

(a) Simulation time as function of the number of elements and (b) evaluation of the convergence of the bearing force in the x-direction for the different methods. The simulations are performed for an eccentricity of 0.9.
Qualitative summary of the advantages and inconveniences of the three different numerical methods.
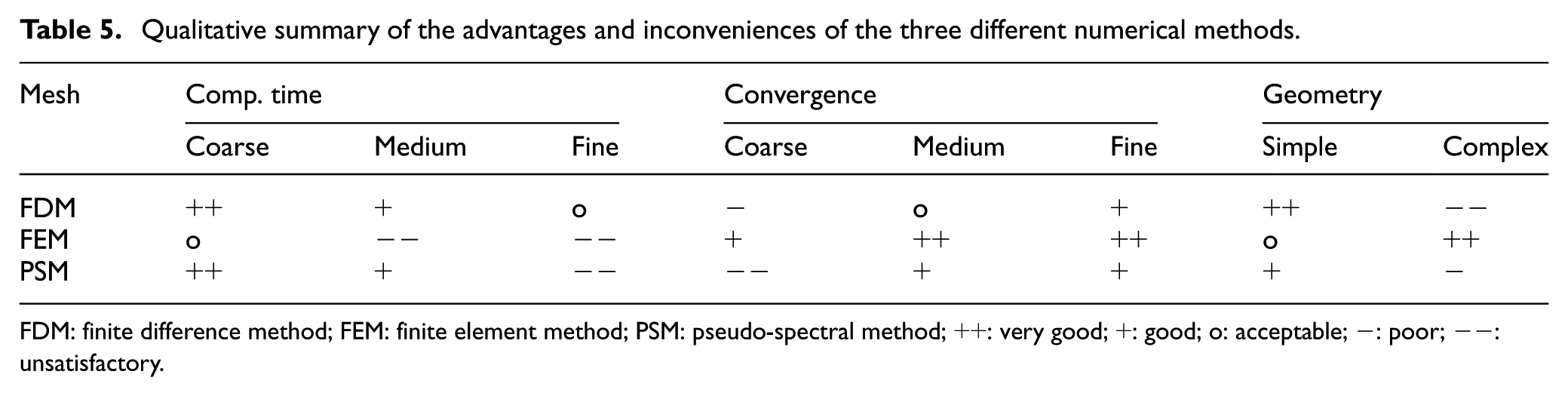
FDM: finite difference method; FEM: finite element method; PSM: pseudo-spectral method; ++: very good; +: good; o: acceptable; −: poor; −−: unsatisfactory.
Dynamic application
The equation of motion of a rigid rotor supported by fluid bearings is simply given by

where
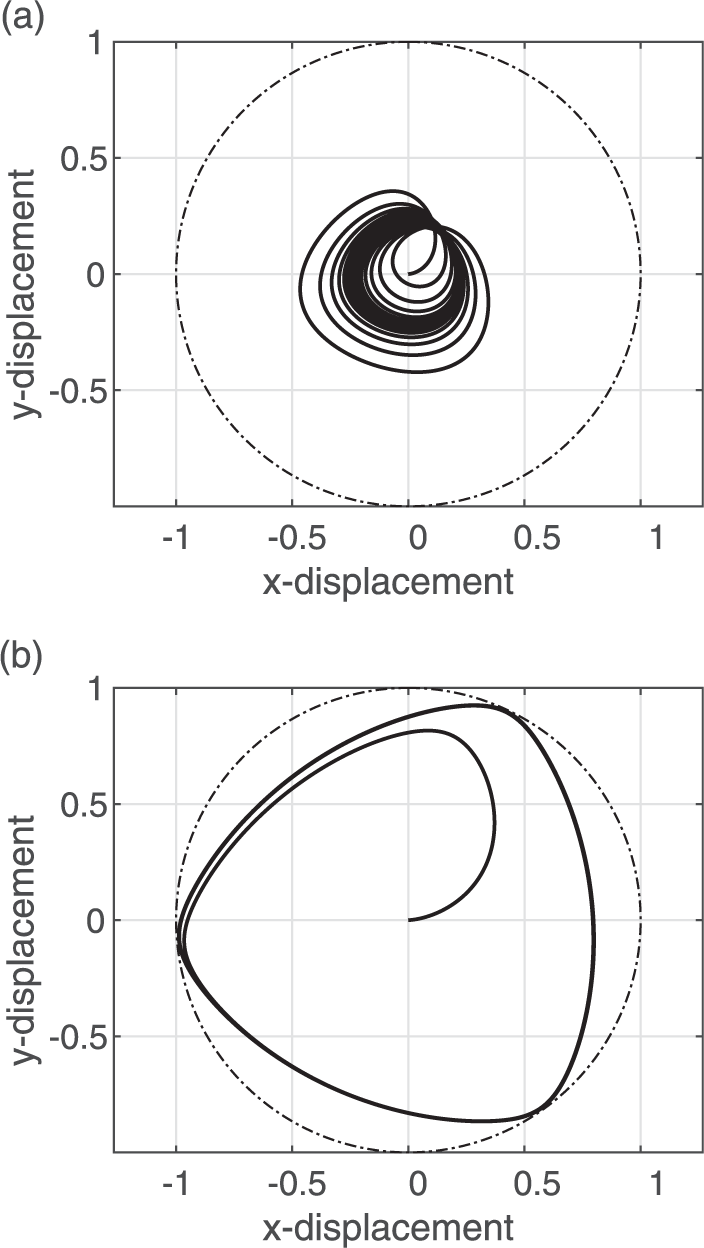
Orbit plots of the rigid rotor for dynamic simulations: (a) vertical rotor at
Orbit plots of the rigid rotor for dynamic simulations: (a) vertical rotor at

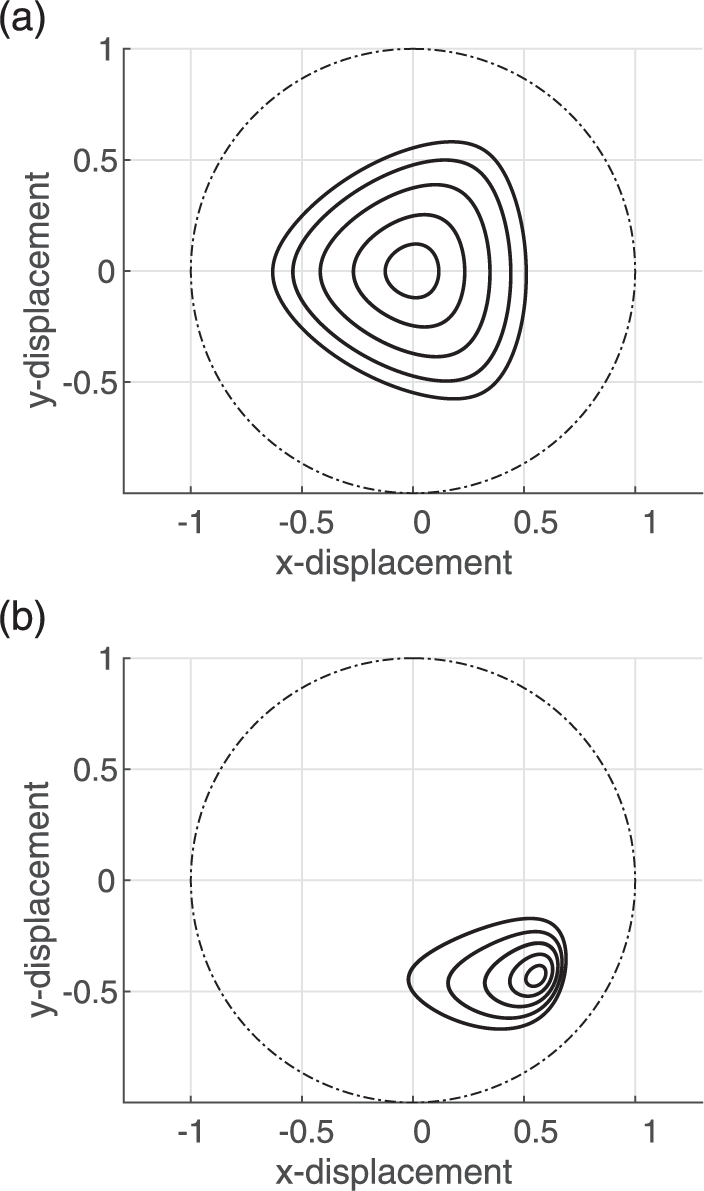
Orbit plots of the rigid rotor with four-lobe bearings: (a) vertical rotor at
Conclusion
The aim of this article was to investigate numerical methods for solving the Reynolds equation in journal bearings. Using the geometry of a multilobe bearing, it is observed that the choice of a specific numerical method should be done with regard to the geometry of the bearing, the eccentricity, and the computational time. For instance, the FDM is appropriate for small eccentricities since the Central Processing Unit time is faster than the other methods due to a reasonable number of elements to reach convergence. However, the accuracy of this method decreases when the eccentricity becomes larger. On the contrary, the FEM has a good convergence for a low number of elements at any eccentricity, but the drawback is the simulation time which is expensive due to the assembly process. However, this method is more suitable for complex bearing geometry. The PSM also has the advantage of having a good convergence for a moderate number of elements at all eccentricities, with a simulation about 10 times faster than FEM. This method is suitable for simple journal geometries with a few number of lobes, which is frequently the case for vertical machines. Hence, the dynamic simulations of vertical machines can be performed in a faster and more accurate manner by applying the PSM to calculate the bearing forces at each time-step. However, the FDM is still an appropriate numerical method to use due to its programming simplicity and computational speed for most of the eccentricities, which may be the reason it is still widely used in rotordynamics software. Depending on the type of dynamic problem investigated, the user can choose the most appropriate method between FDM, FEM, and PSM if one wants to decrease computational time or increase the accuracy of the results.
Footnotes
Appendix 1
Academic Editor: Aditya Sharma
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research presented was carried out as a part of “Swedish Hydropower Center – SVC”. SVC has been established by the Swedish Energy Agency, Elforsk and Svenska Krafnät together with Luleå University of Technology, The Royal Institute of Technology, Chalmers University of Technology and Uppsala University (![]() ).
).